自动控制小车电路的设计制作
- 格式:ppt
- 大小:819.50 KB
- 文档页数:3
自动循迹控制小车设计方案自动循迹控制小车设计方案小组成员班级学号严羽电子信息111 201105070316徐立波电子信息111 201105070312张有锋电子信息112 201105070330联系方式:18868801162013年06月18 日摘要本系统通过采集光电传感器和驻极体的数据来实现电动小车的自动循迹和声控行驶。
控制终端由C8051F020单片机最小系统构成,外围电路包括直流电机H桥驱动模块、光电传感器循迹模块、光电对管测速模块、声控模块、LCD 显示模块等。
运行中,系统通过采集光电传感器的数据并进行相应的比较计算来控制PWM波的输出,进而实现电机转速的实时调节;通过计数光电对管的输出脉冲来计算小车的行驶路程和实时速度;声控电路则将声音命令转换为相应的数字量并作放大处理后输出到CPU进而可以声控小车的启停;而显示模块则能在小车行驶中实时显示其速度与路程。
系统成本低,功耗低,小车调速平滑,过弯稳定,基本满足设计要求。
目录自动循迹控制小车设计方案 (1)摘要 (2)目录 (3)图索引 (4)第1章系统设计要求 (5)1.1 基本要求 (5)1.2 发挥要求 (5)第2章系统方案选择和论证 (6)2.1 题目解析 (6)2.2 方案选择及论证 (6)2.01 控制终端的选择 (6)2.02 电机及其驱动方式的选择 (7)2.03 循迹模块的选择 (8)2.04 测速模块的选择 (8)2.05 显示模块选择 (8)2.06 声控模块的选择 (9)2.07 遥控模块的选择 (9)第3章系统电路设计及原理分析 (11)3.1 核心模块 (12)3.2 电机驱动电路 (12)3.3 红外遥控模块的设计与参数计算: (13)3.4 光电传感器循迹电路 (16)3.5 光电对管测速电路 (17)3.6 显示电路 (17)3.7 声控电路 (18)第4章软件开发 (19)第5章系统主程序流程图 (20)参考文献 (21)附录一:程序清单 (21)附录二:系统电路图 (29)图索引图3-1系统总体框架图 (11)图3-2 C8051F020最小系统 (12)图3-3直流电机驱动电路 (13)图3-4光电传感器循迹电路 (16)图3-5测速电路原理图 (17)图3-6显示电路内部连接图 (18)图3-7声控电路原理图 (18)图5-1系统主程序流程图 (20)第1章系统设计要求第1章系统设计要求1.1基本要求1)小车可以自动寻迹:在设计好的线路上向前或向后跑,转弯等。
工程实践与科技创新1——自动控制小车原理与演示程序说明上海交通大学电子信息与电气工程学院电工电子实验教学中心2012年6月目录一概述 (3)1.1 部件清单 (4)1.2 接线图 (5)二电路原理与电路板 (7)2.1 电路板上元器件规范 (7)2.2 部分元器件封装说明 (7)2.3 注意事项 (7)2.4 电路原理与元器件清单 (8)2.4.1 车头、车尾触碰检测板 (8)2.4.2充电板 (9)2.4.3 行进控制板 (12)2.4.4 电机驱动板 (14)三演示(demo)程序及其流程图 (17)主程序(main): (17)T0中断服务程序: (19)SW0-SW3按键处理子模块: (21)LED显示处理子模块: (22)时间处理子模块: (23)A/D采样: (23)电机PWM调速: (23)一 概述自动控制小车由金属车身、塑料车轮、带变速箱的直流电机和控制电路板等构成,自动控制小车为前驱动,有两个直流驱动电机。
两个电机分别由控制电路中的左、右部分独立控制。
车头和车尾安装有触碰检测板,每个板上分别有左、右检测开关;该4个开关可以在程序中定义为其他功能,如自动控制小车的启动和停止等。
自动控制小车的电路部分由车头触碰检测板、车尾触碰检测板、充电板、电机驱动板和行进控制板共5个电路模块组成(如下图所示)。
各部分电路功能和原理简述如下:电路结构示意图车头触碰检测板:用于检测前进方向的障碍物,设计为2个按钮开关; 车尾触碰检测板:用于检测倒退方向的障碍物,设计为2个按钮开关; 充电器板:可以给4节1.2V 可充电池充电;充电器电路的输入电压为直流12VDC ,输出为6V ,充电电流约为120mA ;电机驱动板:驱动电机正转(前进)、反转(倒退)或停止;行进控制板:获取车头/车尾触碰检测开关信号,发控制指令给电机驱动电路,让电机正转(前进)、反转(倒退)或停止。
自动控制小车模型图充电器1.1 部件清单序号 部件名称 数量 备注1 车体 1(套)包括:车架1个、电机固定件4个、透明PC板1个;2 电机 23 车轮 1(套)2个前轮,2个后轮;4 EH连接线 1(套)5 4节AA电池盒 16 AA镍氢可充电池 47 AC/DC转换器 1 50Hz变压器型,输出12VDC、500mA;8 螺柱、螺杆、螺丝、垫片 1(套)9 车头触碰检测电路板 1 空电路板10 车尾触碰检测电路板 1 空电路板11 充电器电路板 1 空电路板12 行进控制电路板(直插版) 1 空电路板13 行进控制电路板(贴片版) 1 空电路板14 电机驱动电路板 1 空电路板15 电子元器件 1(套)1.2 接线图自动控制小车系统接线图二电路原理与电路板2.1 电路板上元器件规范序号标号器件类型备注1 R*** 电阻2 C*** 非电解电容3 E*** 电解电容包括钽电解和铝电解;4 L*** 电感或磁珠5 U*** 集成电路6 J*** 连接器7 JT*** 晶体8 FU*** 保险丝9 D*** 二极管10 Q*** 开关管包括三极管、场效应管等11 TP*** 测试点12 FM*** 光学点电路板机器焊接用的基准光学点,不用焊接元器件13 MH*** 机械定位孔用于电路板固定的定位孔,不用焊接元器件2.2 部分元器件封装说明AXIAL-350R:通用1/4W直插电阻;AXIAL-400R:通用1/4W直插电阻;AXIAL-400DS:通用二极管,如1N4001;TO-92B:通用直插三极管,如C9013;SW_PUSH:侧面按钮的按键开关(参见右侧图);TESTP:测试点,不用焊接电子元器件;0805R:0805的电阻;0805C:0805的电容;0805L:0805的电感或磁珠;0805LED:0805的发光二极管;其他如1206封装识别方法类似;2.3 注意事项钽电解电容和铝电解电容有“正/负”极性,不可以装反,否则会爆裂;二极管也有“正/负”极性,不可以装反,否则相关电路工作不正常;2.4 电路原理与元器件清单2.4.1 车头、车尾触碰检测板车头触碰检测板原理图车头触碰检测板PCB板器件位置图电路原理:无障碍时,碰触开关SW100或SW101断开,此时开关电路因为行进控制板的上拉电阻而输出高电平;遇到障碍时碰触开关与“地电位”接通,输出低电平。
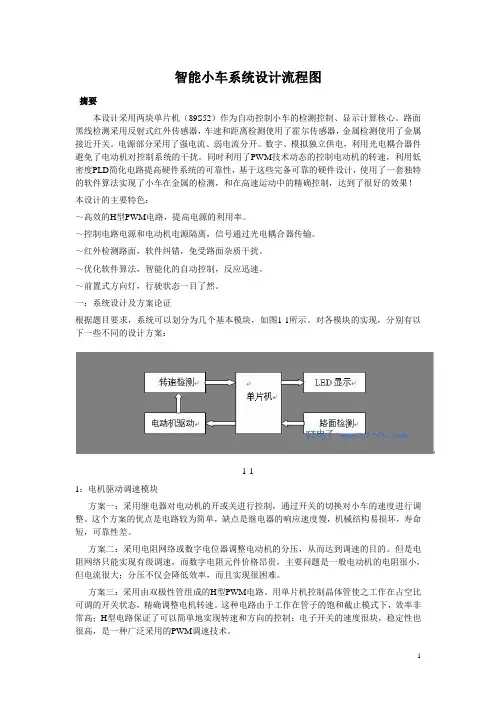
关键词:智能小车;控制系统;设计和实现1智能小车控制系统概述智能小车控制系统是一个综合、复杂的系统,其既有多种技术,也含有嵌入式的软件设备和硬件设备、图像识别、自动控制和电力传动、机械结构等技术知识,智能小车的控制系统主要是围绕嵌入式控制系统进行的,将其作为操控的中心,并借助计算机系统,最终完成自动造作和控制的过程[1]。
智能小车的控制系统流程图见图1所示。
2智能小车的设计和实现2.1智能小车的硬件设计硬件设计是保证智能小车平稳运行的必要条件,它关系着控制系统的精度和稳定性,因此在设计时需要用在模块化设计思想,该研究是通过采取硬件系统K60芯片作为核心控制器,并通过图像采集模块和电机、舵机驱动模块、测速模块、电源模块等组成硬件设计系统图,见图2。
首先,电源电路设计,该设计时智能小车的动力来源,为小车运行提供不断的电力,一般采取7.3V、容量为2000mAh的可充电型的镍铬电池作为电源,但是其不能直接为控制器传输电力,需要在转变电路后才可以进行传输。
转变电路可以保证控制器直接对电池内的电压进行调节,保证不同模块可以正常工作和运行,智能小车主要是依靠控制电力和电机驱动进行转变的。
其次是K60最小系统板,在设计时需要将K60的管脚部分做成最小系统的单独电路板,这样可以简化电路板的设计,促使调试更加顺利,K60系统板主要由K60芯片、复位电路、时钟电路、JTAG下载电路、电源滤波电路组成。
再其次是电机驱动电路,该电路是在集成芯片的驱动下进行的,可以为控制器更其他模块提供较大的电流最终集成电机驱动芯片,但是要特别注意这部分因为在电机驱动过程中有较大的分功率,会导致小车在进行调试时因为过大的电流导致小车电路发生堵塞现象,而使小车电路被烧毁,因此需要设计者避免这种现象,可以将驱动电路做成驱动板[2]。
最后是舵机接口电路。
在智能小车设计中,舵机主要保证小车可以顺利转向,因此舵机的运行电压、转向动作、转向速度都是需要考虑的因素,一般选择舵机时主要选择Futaba3010,选择供电电压为6V。
智能小车系统设计与制作摘要:智能小车采用STM32F103RBT6为主芯片,电机驱动采用高压、大电流双全式驱动器L298芯片,八路循迹反射式光电TCRT5000进行循迹,通过LM358比较电路比较,再进行波形整形,通过触摸屏上的按钮来任意的控制智能小车的方向,用DSl8B20温度传感器采集小车所处环境的温度,小车与上位机之间的通讯采用NRF24L01通讯,电源部分则用双电源供电,运行更可靠。
小车可按照预先设定好的轨道进行循迹,遇到障碍物自行躲避,达到无线遥控、自动循迹的功能。
关键词:STM32F103RBT6;循迹;NRF24L01无线通信;DS18B20温度传感器; 触摸屏智能作为现代社会的新产物,是以后的发展方向,它可以按照预先设定的模式在一定的运行环境中自行的运作,无需人为的操作,便可以完成预期达到的或更高的要求。
随着人们物质生活水平的提高,汽车也越来越普及,而交通事故也相应的增加,在人身财产、生命安全方面造成了一定的负面影响。
目前,智能车领域的研究已经能够在具有一定标记的道路上为司机提供辅助驾驶系统甚至实现无人驾驶,这些智能车的设计通常依靠特定的道路标记完成识别,通过推理判断模仿人工驾驶进行操作,大大降低了事故的发生率。
碰到障碍物,小车会自动的躲避障碍物,就不会有那么多得交通事故。
智能小车是机器人的一个分支,现如今机器人已经不是人类它体现了人类长期以来的一种愿望。
目前已在工业领域得到广泛的应用,而且正以惊人的速度不断向军事、医疗、服务、娱乐等非工业领域扩展。
智能小车的设计结合了最基本的计算机控制技术、单片机技术、传感器技术、智能控制技术、机电一体化技术、无线通信技术及机器人技术,能有效的把大学所学知识进行综合应用。
一、系统总体设计本课题要求:设计一款小车,它具备按规定轨迹自主寻迹运行能力、接收无线遥控信号命令并进行遥控运行的能力、躲避障碍物的能力、能够采集环境的温度或湿度数据并发送至主机的功能。
小车自动往返控制线路的工作原理小车自动往返控制线路的工作原理一、引言小车自动往返控制线路是一种常见的电路设计,用于控制小车在两个点之间自动来回运动。
该电路由多个组件组成,包括电源、开关、继电器等。
本文将详细介绍小车自动往返控制线路的工作原理。
二、电源供电小车自动往返控制线路需要一个稳定的直流电源来提供能量。
通常使用交流电源通过整流和滤波的方式转换为直流电源。
在这个过程中,交流电源首先经过一个变压器,将高压交流电转换为低压交流电。
然后通过整流桥将交流信号转换为直流信号,并通过滤波电容器去除残余的交流成分,得到稳定的直流电源。
三、开关控制小车自动往返控制线路中需要使用开关来实现手动或自动切换功能。
当开关处于手动模式时,用户可以通过手动操作开关来控制小车的运行方向。
当开关处于自动模式时,小车会根据预设程序进行往返运行。
四、继电器工作原理继电器是小车自动往返控制线路中重要的组件之一。
它可以通过电磁感应实现信号的转换和放大。
继电器由线圈、触点和铁芯组成。
当线圈通电时,产生的磁场会吸引铁芯,使触点闭合或断开,从而实现信号的转换。
在小车自动往返控制线路中,继电器用于控制小车的运行方向。
当继电器的触点闭合时,电流可以流向一个方向,使小车向前运行;当继电器的触点断开时,电流可以流向另一个方向,使小车倒退运行。
五、往返控制逻辑小车自动往返控制线路中的逻辑由多个继电器和触发器组成。
其中一个继电器用于控制小车的运行方向,另一个继电器用于检测小车是否到达目标位置。
1. 运行方向控制在自动模式下,当用户设置好目标位置后,运行方向控制继电器会根据预设程序来切换小车的运行方向。
当小车到达目标位置时,该继电器会切换方向,并将信号发送给触发器。
2. 到达位置检测到达位置检测继电器用于检测小车是否到达目标位置。
当小车到达目标位置时,该继电器会切换状态,并将信号发送给触发器。
3. 触发器触发器是一个重要的逻辑元件,用于控制小车的动作。
1引言课程设计目的在于使学生在实习过程中能够理论联系实际,在实际中充分利用所学理论知识分析和研究实际生产过程中出现的各类技术问题,巩固和扩大所学知识面,为以后走向工作岗位打下一定的基础。
在实习过程中,通过动手实践,是学生掌握控制程序、电力电子系统和计算机控制系统等方面的实际知识,并能对所学的专业基础知识进行仿真和调试,了解现场主要设备的用途和电气线路的作用、原理和电气性能。
随着工业的发展,自动化已经成为了现代工业的代名词。
自动运料小车的电气控制设计就是为了适应日益发展的工业生产需求。
自动控制系统的出现大大加快了生产的速度,加快了工业的发展进程。
各种紧密仪器的出现也得益于自动控制系统的作用。
早期运料小车电气控制系统多为“继电器—接触器”组成的复杂系统,但这种系统存在设计周期长、体积大、成本高、可靠性差、功耗高、噪声大、缺乏通用性和灵活性等缺陷。
在实际生产中。
由于存在大量用开关量控制的简单的程序控制过程,而实际生产工艺和流程又是经常变化的,因而传统的继电器接触器控制系统不能满足这种要求。
随着可编程控制器的出现,提高了电气空盒子的灵活性和通用性,其控制功能和控制精度都得到了很大的提高。
PLC完全能够适应恶劣的工业环境。
PLC具备了计算机控制和继电器控制系统量方面的优点,目前在世界各国已作为一种标准化通用设备普遍应用于工业控制。
可编程控制器的广泛应用对于工业的发展具有转折性的影响。
基于PLC的运料小车控制系统,结构简单,体积小,功耗低,大大的提高了效率,降低成本。
2常规电气控制2.1 工艺流程图2-1 小车运料示意图某反应炉由一台小功率三相异步电动机拖动的自动运料小车,其动作顺序与控制要求如下:(1)小车由原位起动前进到1位(A料场)自动停留T1(2min),装A料。
(2)1位装A料完毕,自动返回原位,并停留T2(150s)进行卸料。
(3)卸料完毕,自动前进经1位不停留直到2位(B料场)自动停留T3(100s),装B料。
基于51单片机的红外遥控小车设计和制作本文介绍一款红外线遥控小车,以AT89S51单片机为核心控制器,用L289驱动直流电机工作,控制小车的运行。
本款小车具有红外线遥控手动驾驶、自动驾驶、寻迹前进等功能。
本系统采用模块化设计,软件用C语言编写。
一、设计任务和要求以AT98C51单片机为核心,制作一款红外遥控小车,小车具有自动驾驶,手动驾驶和循迹前进等功能。
自动驾驶时,前进过程中可以避障。
手动驾驶时,遥控控制小车前进、后退、左转、右转、加速等操作。
寻迹前进时小车还可以按照预先设计好的轨迹前进。
二、系统组成及工作原理本系统由硬件和软件两部分组成。
硬件部分主要完成红外编码信号的发射和接受、障碍物检测、轨迹检测、直流电机运行的发生等功能。
软件主要完成信号的检测和处理、设备的驱动及控制等功能。
AT89S51单片机查询红外信号并解码,查询各个检测部分输入的信号,并进行相应处理,包括电机的正反转,判断是否遇到障碍物,判断是否小车其那金中有出轨等。
系统结构框图如图1所示。
图1 系统结构框图三、主要硬件电路1、遥控发射器电路该电路的主要控制器件为遥控器芯片HT6221,如图2所示。
HT6221将红外码调制成38KHZ的脉冲信号通过红外发射二极管发出红外编码。
图2中D1是红外发射二极管,D2是按键指示灯,当有按键按下时D2点亮。
HT6221的编码规则是:当一个键按下超过36ms,振荡器使芯片激活,如果这个按键按下且延迟大约108ms,这108ms发射代码由一个起始码(9ms),一个结果码(4.5ms),低8位地址码(9ms~18ms),高8位地址码(9~18ms),8位数据码(9~18ms)和这8位数据码的反码(9~18ms)组成,如果按键按下超过108ms仍未松开,接下来发射的代码将仅由起始码(9ms)和结束码(2.5ms)组成。
按照上图的接法,K1~K8的数据码分别为:0x00,0x01,0x02,0x03,0x04,0x05,0x06,0x07。
自动运料小车电气控制设计简介自动运料小车是一种用于运输物料的电动小车,广泛应用于物流仓储、制造业和交通运输等领域。
本文主要介绍自动运料小车的电气控制设计,包括电动机驱动、电源供应、控制器选型和控制程序实现。
电动机驱动自动运料小车通常采用直流电动机作为驱动器,其驱动方式可以采用PWM调速或变频调速。
根据小车的负载和速度要求,选择合适的电动机型号和驱动器型号。
常见的电动机型号有DC彩色电机、无刷直流电机和有刷直流电机,其中无刷直流电机具有体积小、寿命长、噪音低和效率高的优点,因此在自动运料小车中应用较为广泛。
电动机驱动电路通常由电源、功率半导体开关和驱动电路组成,其中功率半导体开关采用MOS管或IGBT管,驱动电路采用门极驱动器或驱动IC。
在PWM调速方式下,控制器输出的PWM信号经过门极驱动器或驱动IC后,控制电路将驱动信号传递给功率半导体,由其控制电动机的转矩和速度。
电源供应自动运料小车的电源供应通常采用蓄电池,其电压根据电动机型号和负载情况而定,通常为12V、24V或48V。
蓄电池需要采用高质量的铅酸蓄电池或深循环蓄电池,以保证充放电性能和寿命。
为保证电源系统的稳定性和可靠性,可以在电源系统中加入稳压器、过充保护器和过放保护器等保护措施。
除了蓄电池外,自动运料小车的电源系统还可以采用交流电源或太阳能等新型电源。
例如,将太阳能电池板安装到车顶,通过光伏效应将太阳能转化为电能,再通过电源控制器为电动机供电。
控制器选型自动运料小车的控制器是实现电动机控制的关键组件,其功能包括PWM信号生成、电流测量、速度反馈、保护控制和通信接口等。
常见的控制器型号有通用型和专用型控制器,均可进行编程控制,实现电动机的速度和转向控制。
在选型时需要根据小车的需求和系统功能进行评估,包括可靠性、接口类型、通讯协议、编程方式和性能指标等方面。
例如,选择带有RS485通讯接口的通用型控制器,实现小车的远程监控和控制。
控制程序实现自动运料小车的控制程序实现需要使用编程语言和相应的开发工具。
实验五自动往返小车控制程序的设计
一、实验目的
1、学会熟练使用PLC解决生产实际问题。
二、实验设备
1、FX2N PLC实验平台 1 台
2、微型计算机 1 台
3、编程电缆1根
4、连接导线若干
三、实验内容
如图所示,要求小车的运行如下:
假设小车初始状态为:底门关闭(Y003断开)且位于最后端位置(后限位开关X002接通);
启动按钮X000接通,小车向前运动(Y000接通)并且停止在最前端位置(Y000断开,前限位开关X001接通);
同时,漏斗翻门打开(Y001接通),货物通过漏斗卸下。
7s后自动关闭漏斗翻门(Y001断开);
同时,小车向后运动(Y002接通)至后限位开关位置停止(Y002断开,后限位开关X002接通);
同时,小车底门打开(Y003接通),将小车中货物取下;5s后自动关闭小车底门(Y003断开)。
小车运动顺序控制状态转移图如下:。
学科代码:学号:XXXXXXXXXXXXX 大学(本科)毕业论文题目:基于单片机的多功能智能小车设计学院:专业:年级:姓名:指导教师:完成时间:20 年月日、基于单片机的多功能智能小车设计摘要:近几年,我国经济的迅速的增长使得小车的销售量逐渐升高,2016年,我国新能源汽车的销售达到了51.7万辆,销售率同比增长了20.5%。
汽车数量的日益增多使得交通拥挤的现象越来越严重,因此,交通事故的发生的频率也在逐渐的增多。
为了提高小车运行的安全,本文提出了一种基于单片机的多功能智能型小车的设计。
本文以STC89C51的单片机为核心,设计了一款多功能的智能小车,由于STC89C51的单片机在市场上受到了消费者普遍的好评,利用它进行智能小车的设计,既满足了大众的需求,又提高了小车设计的性能。
同时,本文还结合了直流电机L298N型号的驱动芯片、E18-D80NK 红外避障传感器、TCRT5000红外反射式接近开关传感器对智能小车的整体进行了构架。
关键词:单片机;多功能;智能小车;设计AbstractIn recent years, China's rapid economic growth makes the car sales gradually increased, in 2016, China's new energy vehicle sales reached 517,000, sales rate increased by 20.5%. The increasing number of cars makes traffic congestion more and more serious, so the frequency of traffic accidents is gradually increasing. In order to improve the safety of car operation, this paper presents a multi-functional intelligent car based on single-chip design.In this paper, STC89C51 single-chip as the core, designed a multi-functional smart car, as STC89C51 microcontroller in the market by consumers generally praise, use it for intelligent car design, both to meet the needs of the public, but also improve The performance of the car design. At the same time, this article also combines the DC motor L298N model driver chip, E18-D80NK infrared obstacle avoidance sensor, TCRT5000 infrared reflector proximity switch sensor on the overall structure of the smart car.Key Words: Single-chip;multi-function;intelligent car;design目录Abstract (3)引言 (6)1方案选型 (6)1.1车体设计 (6)1.2电机驱动选择 (6)2.3 PWM调速技术 (8)2.4 循迹模块技术 (9)2.5 避障模块技术 (9)2.6 控制系统模块 (10)2.7电源选择 (10)2总体方案设计 (10)2.1设计任务描述 (10)2.2总体设计 (11)2.3需求分析 (11)2.4总体方案 (11)3硬件电路设计 (11)3.1电源电路设计 (11)3.2驱动电路设计 (12)3.3循迹避障部分电路 (13)4程序设计 (14)4.1主程序设计概述 (14)4.2 主程序流程图 (14)4.3 驱动程序流程图 (15)4.4 循迹程序流程图 (16)4.5 避障程序流程图 (17)5制作安装与调试 (18)5.1小车的安装 (18)5.2小车运动模式调试 (18)5.3小车循迹调试 (19)5.4小车避障调试 (19)5.3小车的功能 (19)结论 (20)参考文献 (21)引言当前,关于智能化小车的设计越来越成为当前学者们关注的热点问题,对于智能小车的设计,采用的方法也越来对多样,利用单片机的程序设计的智能小车也是其中的一种。
基于PLC的小车自动往返控制系统设计针对当前小车在运动过程中控制精度低、自动化水平低等问题,论文以自动往返运动小车为研究对象,在分析了可编程逻辑器特点的基础之上,开展了基于PLC的小车自动往返控制系统的硬件设计、软件设计,最后对进行了总结,为自动往返小车的运行提供了一种可行方案。
标签:PLC,控制系统,小车1. 引言在实际工业生产过程中,运动小车的控制技术水平不仅影响生产成本,同时严重制约着生产效率及产品质量。
在影响产品质量的因素中,除材质等因素外,运动小车的自动化程度也是其中之一。
早期的小车控制技术,大多都是接触器、继电器、形成开关等元器件,这些元器件组成的系统的控制精度不高,再加上人为因素增大了其随意性、降低了运动精度等。
随着控制技术的发展,再加上人们对小车自动化控制的要求越来越高,相应的控制技术也逐步被应用。
可编程逻辑控制器凭借自身精度高、稳定性好、编程容易等独特优势,已逐步取代传动的电路控制,成为控制技术领域的主流产品。
基于当前市场背景,研发一套实用意义强的小车自动往返控制系统势在必行。
2.系统方案设计2.1 plc控制技术的概述。
可编程逻辑控制器作为人类社会发展过程中一项重要发明,从第一台PLC 控制器问世至今,已被应用于各行各业,尤其是近些年来,伴随着先进技术的不断涌现及编程软件的不断优化,编程方式越来越容易,控制成本越来越低,plc 控制技术应用也越来越广泛。
2.1.1 PLC控制技术的特点。
可编程逻辑控制控制技术作为一种目前应用最广的控制技术,相比其他控制技术,可编程逻辑控制技术有其独特的优势,具体如下:2.1.3 控制系统的总体方案设计。
通过对自动往返小车控制系统工艺流程和结构特点的分析,依据实际控制需求,该控制系统可分为过程控制和直接控制。
基于以上所述,该自动往返小车的控制系统方案如图所示。
其中可编程逻辑控制器为该系统的核心,直接通过导线连接完成与相关设备的对话。
3控制系统硬件设计3.1.2 plc类型的选择与应用.基于本课题的控制对象,用于该控制系统的可编程逻辑控制器要具有一定数字量的输入输出能力,方能满足该课题控制要求,具体功能如下:(1)数字量输出点:通过控制KM1及KM2的线圈,来实现三相异步电动机的正反转,该控制共需要2个数字输出点。
设计任务书一、设计内容及要求通过对电气控制系统的设计,掌握电气控制系统设计的一般方法,能够设计出满足控制要求的电气原理图,以及安装布置图、接线图和控制箱的设计,具有电气控制系统工程设计的初步能力。
根据系统的控制要求,采用PLC为中心控制单元,设计出满足控制要求的控制系统。
二、设计原始资料1、设计一小车控制程序,如图所示。
要求起动后,小车从A由左向右行驶。
到每个位置后均停车2秒,然后自动起动。
到达E位置后,小车直接返回A处,再重复上述动作。
当每个停车位置均停车3次后,小车自动停于原位A。
小车电动机功率为3KW。
A B C D E1、具有手动、自动工作方式。
2、各种指示及报警。
三、设计完成后提交的文件和图表1.计算说明书部分1)系统工作原理说明2)操作使用说明。
2.图纸部分:1)电气原理图:主电路、控制电路、梯形图、指令系统。
2)电气箱面板布置图,电气箱内部布置图。
3)接线图。
(相对编号法)4)元件名细表。
5)控制箱尺寸。
四、进程安排1.周1-周2 完成原理图的设计2. 周3 完成元件的选型3. 周4-周5 完成布置图、接线图的设计五、主要参考资料1.建筑电气控制技术王俭建筑工业出版社2.建筑电气控制技术马小军机械工业出版社3.各种电器元件产品样本第一部分计算说明及元件选型计算部分:系统电压为380V,电机额定功率为3KW,COSα=0.866所以其额定电流I N=P/( 31/2U* COSα)=3000/(31/2*380*0.88)=5.26A接触器的选择:接触器选择应考虑极数,额定工作电压,额定工作电流,接通和分段能力,都应符合电机要求,所有辅助触头应满足继电逻辑控制要求,故本设计所选继电器的型号为:LC1-D123,数量为1个。
380V电压下可带4KW的电机,额定电流为9A,大于系统的额定电流5.26A。
故可满足系统设计要求。
热继电器的选择:热继电器的动作整定值取系统额定电流的1.2倍,即其动作值为6.312A所选热继电器的型号为LR1-D09312 其电流整定范围:5.5~8.0A;380V电压下可带3KW的电机。