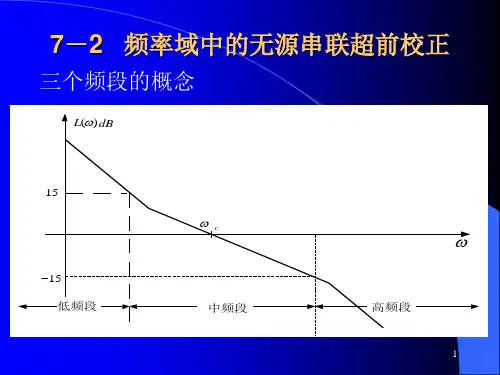
自动控制原理 ghx第七章 频率法校正(二)
- 格式:pptx
- 大小:2.60 MB
- 文档页数:28
目录一.目的 (2)二.容 (2)三.基于频率法的超前校正设计 (2)四.校正前、后系统的单位阶跃响应图及simulink框图、仿真曲线图 (5)五. 电路模拟实现原理 (7)六.思考题 (9)七.心得体会................................................. .10 八.参考文献................................................. .10题目一 连续定常系统的频率法超前校正一.目的1.了解串联超前校正环节对系统稳定性及过渡过程的影响;2.掌握用频率特性法分析自动控制系统动态特性的方法;3.掌握串联超前校正装置的设计方法和参数调试技术;4.掌握设计给定系统超前校正环节的方法,并用仿真技术验证校正环节理论设计的正确性。
5.掌握设计给定系统超前校正环节的方法,并模拟实验验证校正环节理论设计的正确性。
二.容已知单位反馈控制系统的开环传递函数为:()()100()0.110.011o G s s s s =++设计超前校正装置,使校正后系统满足:11100,50,%40%v c K s s ωσ--=≥≤三.基于频率法的超前校正设计1.根据稳态误差的要求,确定系统的开环增益K ;0s 0100lim ()lim (0.11)(0.011)v s K s s sK s s s G →→===++=1001s -未校正系统的开环频率特性为:()0100()(0.11)0.011G j j j j ωωωω=++2.根据所确定的开环增益K ,画出未校正系统的伯德图,并求出其相位裕1γ 由00()1c G j ω=得0c ω ≈30.84090arctan 0.1arctan 0.01ϕ(ω)=-ωω--又()001180+c ϕωγ=代入0c ω得1γ= 0.83o3.选取c ω=561s -,计算α的值()()()00c c c c L L L ωωω=+= ()()0110lg10lg c c c L L ωωαα=-=-=所以有 01|20lg ()|10lg c A ω=α即有 α=0.0754.确定校正网络的转折频率1ω和2ω和传递函数c G11115.34c s T-ω===21207.41Tω===α1s -所以超前校正网络的传递函数为:15.34()207.41c s G s s +=+为了补偿因超前校正网络的引入而造成系统开环增益的衰减,必须使附加放大器的放大倍数为1α=13.33 所以有115.3415.34()13.33207.41207.4113.3315.34(1)14.34207.41(1)207.41c s s G s s s s s++==⨯α++⨯+=+ 5.校正后系统的开环传递函数为:()()()()013.3315.34(1)10015.34()()0.110.011207.41(1)207.41100(1)15.340.110.011(1)207.41c sG s G G s s s s s s ss s s ⨯+==++++=+++6.对验证校正后的系统1190arctan 0.1arctan 0.01arctanarctan 207.4115.34o c c c c γωωωω=----+ = 40.44又110.160.4(1)0.160.4(1)37.740%sin sin 40.44oσ%=+⨯-=+⨯-=%<γ 所以符合系统的要求7.画校正前、校正后、校正系统的伯德图 在MATLAB 命令窗口键入以下命令: Go=zpk([ ],[0 -10 -100],100000); bode(Go) hold on margin(Go)求得校正前系统的伯德图如图1.1所示。

目录摘要 (2)1课程设计目的内容及要求................. 错误!未定义书签。
1.1设计目的 ......................... 错误!未定义书签。
1.2设计内容与要求.................... 错误!未定义书签。
1.3课程设计条件...................... 错误!未定义书签。
2系统设计步骤 .......................... 错误!未定义书签。
2.1系统计算 ......................... 错误!未定义书签。
2.2matlab程序运用.................... 错误!未定义书签。
2.3校正前系统bode图及分析........... 错误!未定义书签。
2.4一次校正后的bode图............... 错误!未定义书签。
2.5二次校正后的bode图分析........... 错误!未定义书签。
3小结 .................................. 错误!未定义书签。
参考文献................................ 错误!未定义书签。
摘要利用频率法串联超前校正,可以根据已知传递函数,分析系统是否稳定。
当一个或某些系统参数的变化时,确定闭环极点随参数变化的轨迹,进而研究闭环系统极点分布变化的规律。
应用matlab 仿真,只需进行简单计算就可得知系统一个或某些系统参数变化对闭环极点的影响趋势。
这种定性分析在研究系统性能和提出改善系统性能的合理途径方面具有重要意义。
【关键词】:闭环特征方程,根轨迹,零极点分布,mtlab 仿真一、设计目的:1、了解控制系统设计的一般方法、步骤。
2、掌握对系统进行稳定性分析、稳态误差分析以及动态特性分析的方法。
3、掌握利用MATLAB 对控制理论内容进行分析和研究的技能。
4、提高分析问题解决问题的能力。


《自动控制原理》仿真实验报告学年学期: 2014-2015学年第1学期实验内容:频率法校正姓名:王建宙班级: 12电4 指导教师:田晴分数:一.实验目的:1. 学习结构图编程,掌握结构图simulink 文件的设计方法;2. 对给定的控制系统,设计满足频域性能指标的校正环节,并通过仿真结果验证设计的准确性。
二.实验内容内容1:已知单位反馈系统,开环传递函数 10(s)(0.2s 1)(0.5s 1)o G s =++ 1. 对给定系统,建立m 文件,确定其伯德图以及相位裕量、穿越频率,闭环系统单位阶跃响应。
2. 要求串联校正后,相位裕量()45c γω>o ,增益裕量6dB GM ≥,设计串联校正环节(分别采用超前、滞后两种方法)3. 在上述m 文件,编写控制器程序。
将控制器、校正后系统伯德图与原系统伯德图绘制在同一figure 中。
校正后系统与原系统阶跃响应绘制在同一figure 中。
4. 在SIMULINK 环境下,搭建系统的结构框图,进行原系统与校正后系统的阶跃响应仿真1)问题分析:本设计中选取滞后校正方法,其原理是观察原系统在穿越频率附近相位迅速衰减,适合采取滞后校正的方法。
所谓滞后校正,就是通过采取适当的滞后校正装置,降低穿越频率w ,使相位裕量提高。
不过降低穿越频率会造成暂态响应时间增大。
2)问题解决:问题一:用MATLAB 建立校正前系统的开环传递函数,确定其相位裕量、穿越频率,伯德图,和闭环系统单位阶跃响应。
程序及说明如下:num=10; %系统K 取10den=conv([0.5 1],conv([0.2 1],[1 0]));G=tf(num,den);[gm,pm,wcg,wcp]=margin(G);disp(['相位裕量=',num2str(pm)]) %校正前系统相位裕量disp(['穿越频率=',num2str(wcp)]) %校正前系统穿越频率disp(['增益裕量=',num2str(gm)]) %校正前系统增益裕量sys=feedback(G,1); % 校正前系统闭环传函margin(G) %校正前系统bode 图step(sys) %校正前系统阶跃响应图grid on运行结果:相位裕量=-8.8865穿越频率=3.7565增益裕量=0.7可见原系统相位裕量小于零,是不稳定的,且增益裕量=0.7。



1一、问题描述:1.设计目的(1) 掌握用频率特性法分析自动控制系统动态特性的方法; (2) 研究串联迟后校正装置对系统的校正作用;(3) 设计给定系统的迟后校正环节,并用仿真验证校正环节的正确性。
(4) 设计给定系统的迟后校正环节,并实验验证校正环节的正确性。
2.设计内容已知单位反馈控制系统的开环传递函数为:()()100()0.110.011o G s s s s =++设计迟后校正装置,使校正后系统满足: 11100,5,%40%v c K s s ωσ--=≥≤ 二、设计过程和步骤:用频率法对系统进行迟后校正的步骤为: 1.由该系统的开环传递函数可知其为I 型系统,则K=1100v K s -=;因L (10)==16.95dB ,()1040lg lg10L ω︒=- 得 ω︒=26.52rad/s又因%40%σ≤,故由公式10.160.4(1)40sin σγ︒︒︒︒=+-=, 得 γ ≥38.68︒2、未较正系统的伯德图如图(1)所示:2图(1) 未较正系统的伯德图3.由于'90arctan0.1arctan tan0.0119.14c c γωω=︒--=︒不满足相位裕量的要求则在对数相频特性曲线上找这样一个频率点,要求在该频率处的开环频率特性的相角为 0180=-180+38.68+15126.32φγε=-++︒︒︒=-︒此时对应的=90arctan0.1arctan0.01126.32m m m ϕωωω-︒--=-︒() 则20.110.73510.0001mm ωω=- 得m ω=6.12rad/s由于m ω=7.47rad/s ﹥5rad/s,满足题目要求,因此这一频率作为校正后系统的剪切频率c ω,即c ω=m ω=7.47rad/s 4.未校正系统在c ω处的幅值等于()10013.946.12c L ω==, 所以20lg 13.94β=,则 4.98β=5.选择迟后校正网络的转折频率211 1.225c Tωω===,则另一个转折频率为3110.24T ωβ==,则迟后校正网络的传递函数10.82()1 4.17c Ts s G s Ts s β++==++ 6.校正系统的伯德图见图(2),图(2)校正系统的伯德图此时校正后系统的开环传递函数为: 1000.82()( 4.17)(0.11)(0.011)s G s s s s s +=+++()校正后系统的相位欲度为:=90+arctan0.82arctan0.01arctan0.1arctan 4.17c c c c γωωωω︒---=46γ︒﹥38.68︒,满足相位欲度的要求。

自动控制原理课程设计报告专业:姓名及学号:姓名及学号:姓名及学号:指导教师:完成时间:一、绪论完成一个控制系统的设计任务,往往需要经过理论和实践的反复比较才可以得到比较合理的结构形式和满意的性能,在用分析法进行串联校正时,校正环节的结构通常采用超前校正、滞后校正、超前滞后校正这三种类型,也就是工程上常用的PID 调节器。
本次课设采用的超前超前校正的基本原理是利用超前相角补偿系统的滞后相角,改善系统的动态性能,如增加相角裕度,提高系统稳定性能等,而由于计算机技术的发展,matlab 在控制器设计,仿真和分析方面得到广泛应用。
本次课设采用用Matlab 软件对系统进行了计算机仿真,分析未校正系统的动态性能和超前校正后系统是否满足相应动态性能要求。
二、设计题目:设角位移伺服系统的开环模型为)12.0()(+=s s Ks G c ,试采用四阶参考模型法设计矫正装置)(s G c ,使得矫正后实现下述性能指标: (a )静态速度误差系数; Kv ≥200 (b )阶跃响应的过渡时间ts<04.秒; (c )阶跃响应的超调量Mp<30%; 并计算相位裕度γc 的大小。
三、原理分析1.基于频率法的四阶参考模型矫正原理:(1)满足稳态精度,令K=200,作原系统的波得图Lo 如图1-1所示。
作图程序为: num=[200]; den=[0.2 1 0]; bode(num,den);原系统开环截止频率为6.310=c ω,相位裕度为o 90=c γ。
系统虽然是稳定的,但是存在严重的振荡。
图1-1 原系统的波德图(2)估算四阶参考模型L 参(w),计算开环截止频率c ω,给定4.0<s t ,6.310=c ω,取20=c ω,作斜率为-20dB 的斜线。
给定%30<p M ,由计算得中频段宽度7.61630643016%64%=-+=-+=p p M M h ,取8=h ,则其转折频率707.712≈==c hωω;606.563≈==c h ωω;过72=ω作斜率-40dB 的斜线与原系统波德图低频段相交, 求得第一衔接点为7.010121==ωω; 取3ω的2倍频作为4ω,120234==ωω; 参考曲线的传递函数为:23''43.1200)(ss s G c +=作参考特性曲线波德图如图1-2所示: 校正装置的特性为L 校,L 校= L 参-Lo 。