玩具设计中马达的选用技巧和方法
- 格式:doc
- 大小:316.50 KB
- 文档页数:4
马达选型与计算引言本文档旨在介绍马达选型和计算的基本原理和方法。
马达是一种常用的电动机械设备,选择合适的马达对于正常运行和高效工作非常重要。
马达选型原则马达的选型应基于以下几个原则:1. 负载要求:根据所驱动设备的负载要求(例如扭矩和转速)选择合适的马达类型和规格。
2. 电源供应:根据可用的电源供应(例如交流电或直流电)选择相应的马达。
3. 功率需求:根据所需的功率输出选择合适的马达。
4. 空间限制:考虑到安装空间的限制,选择体积适合的马达。
5. 可靠性和维护要求:根据马达的可靠性和维护要求选择合适的型号和品牌。
马达计算方法马达计算是确定适合的马达规格的关键步骤。
以下是基本的马达计算方法:1. 确定负载参数:首先,准确测量所驱动设备的负载参数,例如扭矩和转速。
2. 计算所需的功率输出:根据负载参数和工作条件计算所需马达的功率输出。
功率(P)的计算公式为:P = 扭矩(T) ×转速(N)其中,扭矩的单位为牛顿·米(Nm),转速的单位为转每分钟(rpm)。
3. 确定额定功率:根据所选马达的额定功率(通常可从马达技术参数手册中获取),确保所需功率输出不超过马达的额定功率。
4. 选择马达类型和规格:基于马达技术参数手册中的相关信息,选择合适的马达类型和规格,以满足所需功率输出。
5. 验证选择的马达:根据所选马达的技术参数验证其是否满足其他要求,例如运行效率、启动和制动特性等。
结论本文档介绍了马达选型和计算的基本原理和方法。
在选择马达时,请根据负载要求、电源供应、功率需求、空间限制、可靠性和维护要求等因素进行综合考虑。
马达计算则指导了确定适合的马达规格的步骤。
通过合理的马达选型和计算,能够提高马达系统的性能和效率,实现良好的运行和工作效果。
马达选型计算方法
马达选型是根据工作要求来确定所需马达的类型和规格。
它涉及到诸
多因素,包括负载要求、加速度、速度、效率、尺寸、成本等。
以下是一
种常用的马达选型计算方法:
首先,确定负载要求。
需要计算马达的负载力矩、负载转矩和负载惯
性力矩等参数。
这些参数可以通过考虑工作环境、工作装置的性能和负载
特性来计算得到。
其次,确定所需的速度和加速度。
这取决于工作过程的要求和工作装
置的特性。
速度和加速度会影响到马达的选型和规格,因为不同的马达对
速度和加速度的要求不同。
然后,根据负载和速度要求计算所需的马达功率。
根据负载和速度的
关系,可以计算得到所需的功率值。
这个值可以作为选型的基准,帮助确
定所需马达的类型和规格。
接着,根据马达效率和负载转矩计算所需的马达转矩。
马达转矩是根
据所需的功率和马达效率计算得到的。
马达的转矩要大于负载转矩,以确
保能够满足工作要求。
在选型过程中,还需要考虑马达的尺寸和成本。
尺寸会受到工作环境
和安装要求的限制,因此需要选择适合的尺寸。
成本方面,需要根据预算
来选择合适的产品。
最后,需要根据选型的计算结果与实际生产中的经验进行对比和评估。
如果计算结果与经验不符,可能需要重新调整参数或重新选择马达的类型
和规格。
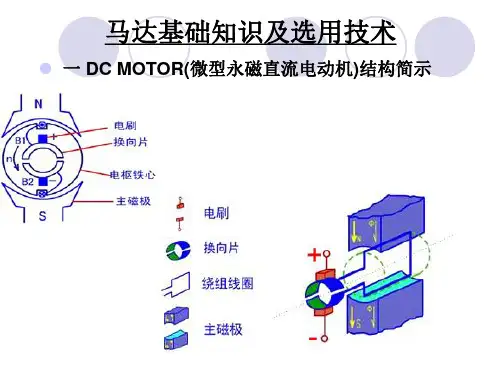
马达选用方法马达有构造与动作原理的不同,选用时要了解马达基本特性的差异,再根据设备需求的性能与合适的价位来选择适当的马达。
1. 马达的基本特性(1) 感应马达为AC小型马达的代表,额定转速在1,400rpm/50Hz,(1,600rpm/60Hz),一般多与减速机联结使用。
其衍生多种不同功能之马达--如改良起动特性使可以瞬间正逆转之可逆马达。
可逆马达也有搭配电磁剎车之机种。
感应马达、可逆马达、搭配电磁剎车之马达都可以搭配电子剎车器进行瞬间剎车、正逆转、方向切换,增加发电回授的调速马达可搭配调速器做速度调控。
使用无接点信号之电子剎车器、调速器可搭配可程控器(PLC)或工业计算机(IPC)来控制马达运转。
(2)有刷直流马达直流马达的优点有速度调整容易,启动转矩较大等,因此广泛应用在消费产品上,大功率的直流马达则使用在电动车、工作母机等。
(3)无刷直流马达以驱动器控制流入马达的电流量,小型化、高转距、调速范围大且控制较佳,从低速到高速可保持稳定的速度与转距。
(4)步进马达透过控制器指定脉波数量的变化,就可以的到精确的马达运转与定位,适用于开回路设计,有低转速、低振动、转轴保持力、位准精度高、误差率低且不累积等优点,可搭配高精度高强度的减速机使用。
(5)伺服马达采用闭回路系统,结合编码器作回授控制,所以马达方面不会有不准的现象,但容许惯量较小,适合高转速移动量较长使用。
2. 马达选用要点在性能上,除了马达的运转特性外,装备所需转速、运转周期、位准精确度、剎车特性与速度控制特性应为选择重点。
(1)AC小型标准马达(2)依据负载之不同,其转速会有几个百分比之内的变化量,因此必须在考虑转速会因负载产生变动之下来选用。
(2)步进马达步进马达较不适于连续运转的用途,而较适用于运转周期低于一半的场合使用,也就是运转时间小于停止时间的场合。
马达的好玩技巧
马达是一种电动工具,可以用于驱动各种机械装置。
以下是一些与马达相关的好玩技巧:
1. 马达旋转:可以通过插上电源线并按下开关,使马达快速旋转起来,制造出一个旋转的视觉效果。
2. 马达表演:可以通过连接杆件或轮子等装置,让马达执行一些有趣的动作,如翻滚、倒立等,以展示马达的灵活性和控制力。
3. 连环马达:可以将多个马达连接在一起,形成一个连环系统,通过调整马达之间的速度和方向,可以制造出复杂有趣的动作和互动效果。
4. 马达音乐:将马达与音乐结合起来,可以通过调整马达的速度和振动幅度,以及使用合适的材料和工具,制造出独特的声音效果,创造出有趣的音乐演奏。
5. 马达艺术:可以使用马达作为创作工具,结合其他材料和技术,制作出艺术作品,如机械雕塑、动态装置等,展示马达在艺术创作中的独特应用。
总之,马达可以通过创造性的使用和结合其他元素,实现各种有趣的效果和应用,给人们带来欢乐和惊喜。
马达选型计算方法1. 常用马达特点1.1. 交流马达:最常用。
转矩大,转速一般在1500转/分左右。
1.2. 直流马达:1.3. 步进马达:如东方。
扭矩大。
不能扭矩过载,否则会丢步。
选型计算一般留100—200%的转矩余量。
1.3.1. 从静止到额定转速(1000转/分左右)要约0.2—0.4秒。
1.4. 数字伺服马达:如松下。
功率大。
高速时扭矩稳定,扭矩过载能力强,一般为额定的3倍。
可以长时间工作的额定转矩的2倍。
1.4.1. 从静止到额定转速(3000转/分左右)要约60毫秒。
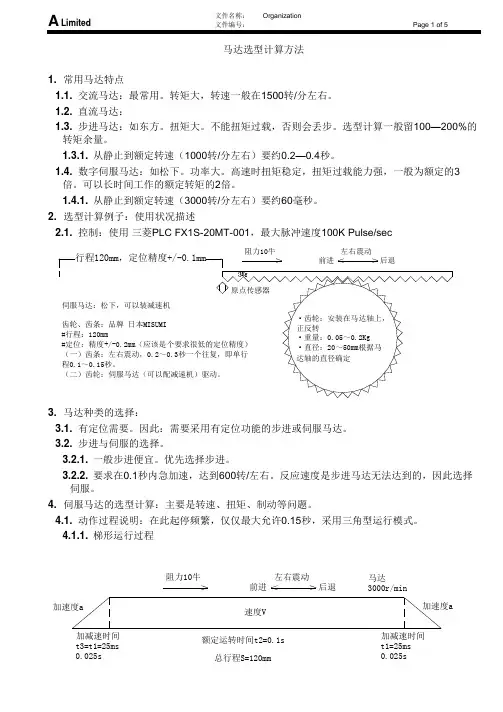
2. 选型计算例子:使用状况描述2.1. 控制:使用三菱PLC FX1S-20MT-001,最大脉冲速度100K Pulse/sec3. 马达种类的选择:3.1. 有定位需要。
因此:需要采用有定位功能的步进或伺服马达。
3.2. 步进与伺服的选择。
3.2.1. 一般步进便宜。
优先选择步进。
3.2.2. 要求在0.1秒内急加速,达到600转/左右。
反应速度是步进马达无法达到的,因此选择伺服。
4. 伺服马达的选型计算:主要是转速、扭矩、制动等问题。
4.1. 动作过程说明:在此起停频繁,仅仅最大允许0.15秒,采用三角型运行模式。
4.1.1. 梯形运行过程4.1.2. 三角形运动过程(适合频繁启停),此时T2=0。
4.2. 计算过程4.2.1. 考虑点:4.2.1.1. 启动:机构负载、摩擦力/阻力f、直线加速v、角加速度θ4.2.1.2. 平稳运行:机构负载、摩擦力/阻力f4.2.1.3. 制动时:机构负载、摩擦力/阻力f、直线减速(惯性)、负角加速度(惯量)4.2.2. 直线机构负载、摩擦力/阻力的计算4.2.2.1. 直线机构1:平台根据:·s = v(t2) +[ ½ x a (t1)2 ] x 2·v = at1·F1=ma(F1为负载力,m为质量,a为加速度)·F2=F1 + f(F2为总负载力,f为阻力/摩擦力)已知:·加速时间=减速时间=t1=总时间0.15s / 2=0.075s·匀速运行时间t2=0s(三角启停)·行程s=120mm=0.12m·质量m=3Kg·阻力f=10N计算得:·加速度a=21.4m/s2·最大速度V max=at=21.4 x 0.075=1.605m/s·运动动作克服力F1=3Kg x 21.4m/s2 = 64.2N·运动总力F2=64.2 + 10=74.2N假设:使用r=0.02m(Φ40mm)齿轮·需要转矩为M=F2 x r =74.2N x 0.02m = 1.484Nm·需要最大转速V max = V max / 2πr = 1.605 / (2π0.02) = 12.78转/秒 = 766.8转/分·需要最大角速度:ω=V max / π=12.78转/秒 / π=4.07rad/s(弧度/秒)预选型:·根据松下马达选型目录。
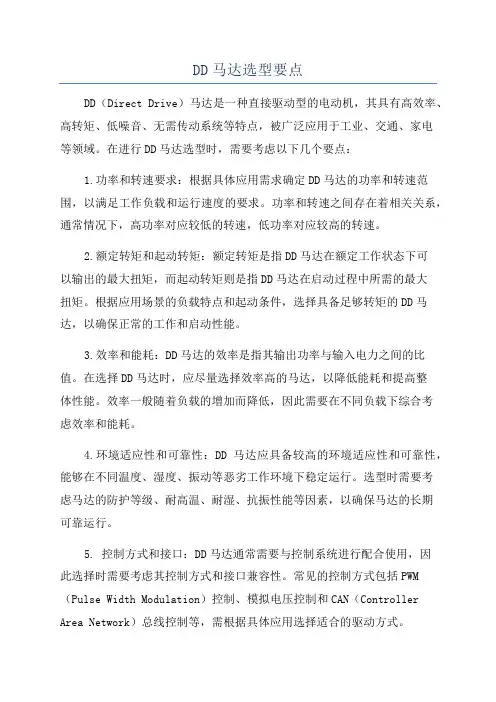
DD马达选型要点DD(Direct Drive)马达是一种直接驱动型的电动机,其具有高效率、高转矩、低噪音、无需传动系统等特点,被广泛应用于工业、交通、家电等领域。
在进行DD马达选型时,需要考虑以下几个要点:1.功率和转速要求:根据具体应用需求确定DD马达的功率和转速范围,以满足工作负载和运行速度的要求。
功率和转速之间存在着相关关系,通常情况下,高功率对应较低的转速,低功率对应较高的转速。
2.额定转矩和起动转矩:额定转矩是指DD马达在额定工作状态下可以输出的最大扭矩,而起动转矩则是指DD马达在启动过程中所需的最大扭矩。
根据应用场景的负载特点和起动条件,选择具备足够转矩的DD马达,以确保正常的工作和启动性能。
3.效率和能耗:DD马达的效率是指其输出功率与输入电力之间的比值。
在选择DD马达时,应尽量选择效率高的马达,以降低能耗和提高整体性能。
效率一般随着负载的增加而降低,因此需要在不同负载下综合考虑效率和能耗。
4.环境适应性和可靠性:DD马达应具备较高的环境适应性和可靠性,能够在不同温度、湿度、振动等恶劣工作环境下稳定运行。
选型时需要考虑马达的防护等级、耐高温、耐湿、抗振性能等因素,以确保马达的长期可靠运行。
5. 控制方式和接口:DD马达通常需要与控制系统进行配合使用,因此选择时需要考虑其控制方式和接口兼容性。
常见的控制方式包括PWM (Pulse Width Modulation)控制、模拟电压控制和CAN(Controller Area Network)总线控制等,需根据具体应用选择适合的驱动方式。
6.体积和重量:根据安装空间和载荷要求,选择体积和重量适中的DD马达。
体积和重量过大会增加系统的复杂性和成本,而体积和重量过小则可能影响马达的性能和使用寿命。
7.成本和供应链:选型时还需考虑DD马达的成本和供应链情况。
成本包括马达本身的价格以及使用、维护和更换的成本,需要综合考虑性价比。
供应链则包括供货周期、售后服务等因素,确保能够及时获取所需的DD马达以及相关技术支持。
玩具设计中马达的选用技巧和方法马达是玩具能够保持持续动力的主要动力源。
设计人员在玩具生产中很少有机会设计一个马达,主要是选用。
玩具马达的选用也有很多技巧和方法。
在玩具制造中常用的马达(电机),有万宝制(Mabuchi)、标准(Standard)等,这些马达生产厂家的产品都有马达性能的参照表,设计人员很少有机会设计一个马达,主要是选用,当然也可能因为某种原因而专门设计一个马达(很多马达厂的工程师都是从Mabuchi出来的,所以Mabuchi的标准基本可以用作玩具业的马达标准)。
用试验找出合适的转速比和扭矩马达厂的标准是空载的转速,而转速比计算时,一般就是用空载转速的计算。
行走类玩具的转速比在80~150之间,因玩具产品并非是一种精密的机械,所以可以通过调节齿轮的传动来得出实际需要的传动比。
比如:齿轮传动中某一节的齿数比为20:8,实验发现转速太慢则可以试一下22:6,如果转速太快,又可以换18:10,这种办法非常方便。
马达产品都有一个最大载荷的数据,还有一个载荷与转速的关系。
因为玩具产品一般不会很大而且是用电池驱动的较多,所以马达的载荷也不会很大。
一般来说,载荷与扭矩越大,马达的体积也越大,所要的电池也越多,而且玩具的重量也越重,所以尽量选用合适的马达。
一般保险起见,载荷与转速在曲线上升区的马达就管用。
如果要节约成本,在找到一个大功率马达就可以起作用的情况下,换一个小功率的试一下。
通过反复试验,找到一个功率较小又能满足要求的马达。
用收音机做干扰测试马达的工作原理是不断地通过电刷来改变线圈中的电流,从而保证连续的转动。
可以想像,马达里的磁铁越大,线圈越长,则扭矩会越大,而这种电流的改变会形成一个电磁波。
电磁波的存在会对很多种家用电器造成干扰。
如果一个小孩在等飞机的时候玩带有这种马达的玩具,还有可能影响飞机的起降。
所以在实际工作中会增加一个抗干扰的垫圈(如DV WASHER , 0.5港币左右),但一般设计时都会在马达的两个电极上并联上一个陶瓷片电容或一个电阻(稳定电路的作用),一方面减少电刷与线圈转换时产生的电流影响,另一方面起稳定作用。

低速大扭矩马达的材料选择与性能优化马达是现代机械与电子设备中不可或缺的关键组件之一,其用途广泛,从家电到工业设备都有马达的身影。
在某些特殊场景下,需要低速大扭矩的马达来完成工作任务,如机械手臂、自动门等。
本文将就低速大扭矩马达的材料选择与性能优化进行深入探讨。
首先,材料选择是设计低速大扭矩马达的重要一环。
马达的转子和定子是驱动力传输的关键部分,因此需要选择适合的材料以满足高扭矩和低速的要求。
对于转子的材料选择,需要考虑强度、磁导率和导磁性能。
常见的转子材料有软磁材料和磁体材料。
软磁材料具有良好的导磁性能和磁导率,如铁氧体材料、硅钢片等,适合在低速大扭矩马达中使用。
而磁体材料则具有较高的磁化强度和矫顽力,如钕铁硼等,适合在高速马达中使用。
对于定子的材料选择,需要考虑导磁性能、热传导性能和机械强度等方面。
常见的定子材料有硅钢片、铜、铝等。
硅钢片由于其较低的磁导率和导电率,能够减小铁心和定子之间的涡流损耗,适合在低速大扭矩马达中使用。
而铜和铝具有良好的导电性和热传导性能,能够提高马达的效率和散热效果。
除了转子和定子的材料选择外,低速大扭矩马达还需要优化设计以提高性能。
以下是几个常见的优化策略:首先,优化磁路设计。
合理设计磁路结构,如增加铁芯的长度和宽度、减小绕组电阻等,能够提高磁路饱和度和导磁性能,从而增加马达的输出扭矩。
其次,优化绕组设计。
合理设计绕组的截面积和导线的材料,如增大导线截面积、采用低电阻率的铜材料,能够降低绕组的电阻和损耗,提高马达的效率。
再次,优化冷却系统。
低速大扭矩马达在工作过程中会产生大量的热量,需要通过冷却系统进行散热。
合理设计冷却系统,如增加散热片的数量和风扇的转速,能够提高冷却效果,防止马达过热。
最后,采用高精度的加工工艺。
在制造过程中,采用高精度的加工工艺能够提高马达的转子和定子的精度和匹配度,减小摩擦和损耗,提高马达的性能和寿命。
综上所述,低速大扭矩马达的材料选择与性能优化是设计过程中需要重点考虑的因素。
专利名称:马达的最佳动作模式选定方法、马达的最佳动作模式选定程序以及马达选定装置
专利类型:发明专利
发明人:三浦祥太,丸山正幸
申请号:CN201380003682.5
申请日:20131219
公开号:CN104395847A
公开日:
20150304
专利内容由知识产权出版社提供
摘要:最佳动作模式选定方法在由定位时间和停止时间规定的马达的动作模式中,选择多个可选择的马达并指示最佳的动作模式,其中,该定位时间是使负载旋转定位角度的马达的马达输出轴进行旋转的时间,该停止时间是上述马达输出轴停止的时间。
最佳动作模式选定方法包括以下步骤:综合判断步骤,根据能够符合的项目,计算综合判断结果,将综合判断结果与各马达相关联地进行存储;以及一览显示步骤,将马达的一览表与综合判断结果一起显示。
申请人:日本精工株式会社
地址:日本东京都
国籍:JP
代理机构:北京林达刘知识产权代理事务所(普通合伙)
代理人:刘新宇
更多信息请下载全文后查看。
玩具设计中马达应用技巧
佚名
【期刊名称】《中外玩具制造》
【年(卷),期】2007(000)009
【摘要】马达是玩具能够保持持续动力的主要动力源。
设计人员在玩具生产中很少有机会设计一个马达,主要是选用,玩具马达的选用也有很多技巧和方法。
【总页数】2页(P72-73)
【正文语种】中文
【中图分类】TS958.02
【相关文献】
1.玩具设计降低成本的10大技巧 [J], Suzanne Mills-Winkler;文志君(编译)
2.浅谈机动玩具设计技巧 [J], 郭大健
3.几何学在木制陈设玩具设计中的应用 [J], 王影;陈思宇
4.仿生设计在婴幼儿牙胶玩具设计中的应用 [J], 何凤
5.交互式智能技术在玩具设计中的应用研究 [J], 张雯
因版权原因,仅展示原文概要,查看原文内容请购买。
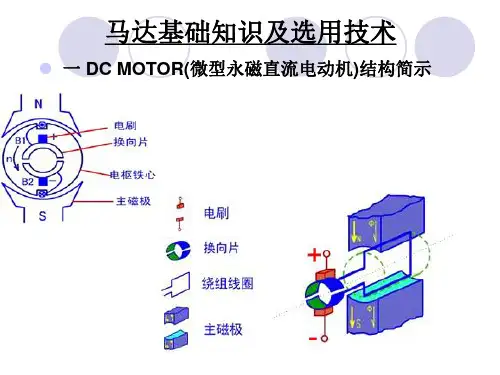
马达的基本认识
1、马达编号——马达的编号,无论万宝至或是其它厂家的产品,都是以万宝到的编号来分辩各类成达的形
状及结构我们常用的成达有FA-130、RE-140、SH020等等。
2、马达的选择——马达的种类很多,要选择一种适合的应用在产品上,首先要考虑产品本身的需要,如马达尺寸、价钱、扭力、电流、电压及噪音要求等。
一般用于玩具的马达可分为三大类(如下表)第一类是经济型,第二类是低噪音型,第三类是重工型,我们经常用于产品上的,最多为第一类及第二类。
面第三类则较为少用。
3、常用马达基本尺寸:
F型
编号 -140 -260 -280
长度 25 26.9 30.5
直径 ф21 ф23。
8 ф24。
2
R型
编号 -130 -260 -280
长度 25 26.9 30.5
阔度 ф20.1 ф24.2 ф24.2
厚度 15.1 18.3 18.3
S型
编号 -020
长度 18.9
阔度 18.0
厚度 9.5
倒角设计标准
取R=0。
25T
B=2/3T但为便于走料,B值最小应取Bmm=0。
1
外形尺寸≦100mm的零件,如无特别说明或要求,外形转角位一般取R=0。
30
任何外露的塑胶零件,可触模的边均要包R。
视零件的大小,一般来说
外形尺寸≦100mm时,取R=0。
30
外形尺寸>100mm时,取R=0。
50,如底座等。
胶水柱设计
胶水柱与司筒的配合,司筒的设计可能用门角孔,因为六角形的抓紧力比圆孔强,而六角孔有空隙给胶。
六、驱动马达的选择驱动滚珠丝杠旋转的马达,通常根据转速,旋转扭矩,最小进给量对其进行选择。
6、1使用伺服马达时6、1、1转速马达所需要的转速,根据进给速度,滚珠丝杠的导程,减速比由(20)式求出。
Nm:马达所需要的转速(min-1)V:进给速度(m/s)Ph:滚珠丝杠的导程(mm)A:减速比马达的额定转速必须满足Nr≥NmNa:马达的额定转速(min-1)6、1、2所需要的分辩率角度测试仪和驱动器所需要的分辩率,根据最小进给量,滚珠丝杠的导程,减速比,由(21)式求出。
B:角度测试器和驱动器所需要的分辩率(p/rev)Ph:滚珠丝杠导程(mm)A:减速比S:最小进给量(mm)6、1、3马达扭矩马达所需扭矩,在等速时,加速时,减速时是不相同的。
a)最大扭矩马达所需最大扭矩,必须在马达的瞬间最大扭矩值以下。
T max≤TP maxT max :作用于马达上的最大扭矩TP max 马达的瞬间最大扭矩b)扭矩的有效值需要求出马达所需的扭矩有效值。
扭矩的有效值根据(22)式计算。
T mas:扭矩的有效值(N.mm)Tn:变动扭矩(N.mm)tn:扭矩Tn的负荷时间(s)t:周期(s)(t=t1+t2+t3)计算出的扭矩有效值,必须满足:T mas≤TrTr:马达的额定扭矩(N.mm)6、1、4惯性矩马达所需的惯性矩由(23)式求出。
(23)Jm:马达所需的惯性矩(kg.m2 )C:由马达,驱动器所决定的系数(通常是3~10左右,但是随著马达驱动器种类不同,而有差异。
请通过马达厂家的产品说明书来确认。
)马达的惯性矩必须大于计算出的Jm值。
6、2使用步进马达(脉冲电机)时6、2、1最小进给量(每一脉冲的进给量)马达和驱动器所需要的步进角,根据最小进给量,滚珠丝杠的导程,减速比,由(24)式算出。
(24)E:马达和驱动所需的步进角(度)S:最小进给量(mm)Ph:滚珠丝杠的导程(mm)A:减速比6、2、2脉冲速度和马达扭矩a)脉冲速度脉冲速度根据进给速度和最小进给量由(25)式求出。
玩具设计中马达的选用技巧和方法(总2页)
-CAL-FENGHAI.-(YICAI)-Company One1
-CAL-本页仅作为文档封面,使用请直接删除
玩具设计中马达的选用技巧和方法
马达是玩具能够保持持续动力的主要动力源。
设计人员在玩具生产中很少有机会设计一个马达,主要是选用。
玩具马达的选用也有很多技巧和方法。
在玩具制造中常用的马达(电机),有万宝制(Mabuchi)、标准(Standard)等,这些马达生产厂家的产品都有马达性能的参照表,设计人员很少有机会设计一个马达,主要是选用,当然也可能因为某种原因而专门设计一个马达(很多马达厂的工程师都是从Mabuchi出来的,所以Mabuchi的标准基本可以用作玩具业的马达标准)。
用试验找出合适的转速比和扭矩
马达厂的标准是空载的转速,而转速比计算时,一般就是用空载转速的计算。
行走类玩具的转速比在80~150之间,因玩具产品并非是一种精密的机械,所以可以通过调节齿轮的传动来得出实际需要的传动比。
比如:齿轮传动中某一节的齿数比为20:8,实验发现转速太慢则可以试一下22:6,如果转速太快,又可以换18:10,这种办法非常方便。
马达产品都有一个最大载荷的数据,还有一个载荷与转速的关系。
因为玩具产品一般不会很大而且是用电池驱动的较多,所以马达的载荷也不会很大。
一般来说,载荷与扭矩越大,马达的体积也越大,所要的电池也越多,而且玩具的重量也越重,所以尽量选用合适的马达。
一般保险起见,载荷与转速在曲线上升区的马达就管用。
如果要节约成本,在找到一个大功率马达就可以起作用的情况下,换一个小功率的试一下。
通过反复试验,找到一个功率较小又能满足要求的马达。
用收音机做干扰测试
马达的工作原理是不断地通过电刷来改变线圈中的电流,从而保证连续的转动。
可以想像,马达里的磁铁越大,线圈越长,则扭矩会越大,而这种电流的改变会形成一个电磁波。
电磁波的存在会对很多种家用电器造成干扰。
如果一个小孩在等飞机的时候玩带有这种马达的玩具,还有可能影响飞机的起降。
所以在实际工作中会增加一个抗干扰的垫圈(如DV WASHER , 0.5港币左右),但一般设计时都会在马达的两个电极上并联上一个陶瓷片电容或一个电阻(稳定电路的作用),一方面减少电刷与线圈转换时产生的电流影响,另一方面起稳定作用。
实际工作中,用一个小收音机来做干扰测试器材,如不影响所有波段的电台就基本可以了。
马达转动轴一般是铁轴,而铁轴一般直接紧配一个6齿或8齿的0.5模数的齿轮(或一个小带轮或锅杆),当是齿轮或锅杆时,特别是锅杆时,会因为刚起动的瞬间,齿与齿之间会卡位,这时线圈中的电流会加大,而导致铁轴串动,串动就会解卡,所以在固定马达时千万不要把轴在轴的方向上固定死(致少要有0.5mm的余量)。
安置要注意减少噪音线圈是有电阻的,电流通过电阻时会发热,所以马达的外壳最好不能被直接接触到,同时马达也不能放在密闭的小盒子里,密闭的空间会导致热量不易散发,而且密闭的小盒子会成为一个音箱放大了马达的噪音。
马达产品遇到最大的问题就是噪音,虽然这种噪声也许不会有安全性问题,但听起来不舒服。
噪声的最大问题出之于高速齿,一般齿与齿的中间间隙会有10个丝到20个丝之间(对0.5模的齿轮来说)。
间隙太小,高速齿会碰撞发出较大的噪音;太大,一方面动力不足,另一方面也会有噪音,所以有时会用皮带轮或用一个软的传动齿(如PE轮)来降低噪音,当然还可以加一点马达油(无毒的马达油)。
但是,还得注意带马达的牙箱最好不要与制件,特别是大的带有相对密闭空间的制件共件,即在大的制件上直接做出牙箱夹板,如电池箱、车底座等。
这些相对密闭空间会起到一个扩音器的作用,几十倍地放大噪音。
笔者经历过很多这方面的设计,如直接把马达固定在电池箱的底部或侧边,那噪音会非常恐怖。
举一个实例,某一公司开发过一个1.5英尺大的遥控车(甲壳虫外形),当时就是在车底直接做出牙箱,即把马达直接固定在车底上,因为这样省掉一套模具钱,同时降低装配时间,但噪音振动直接传动到车底引起车底共振,结果噪音非常大。
最后只得又重新做了一套模具,把牙箱拆出来,并在牙箱与车底安装处垫上海绵以吸振才解决问题。
可见玩具的噪音很大时可以想办法在牙箱与紧固件之间加上海绵或其它的吸振软材料(如橡胶片等)来减少共振而得以减少噪音。
固定和实现正反转的方法
马达的两头专门设计有固定的位防转动。
只要参照马达的尺寸图,用上下两件夹板夹住就可以了。
一般不会固定马达的壳身,因为这样一方面散热不好,而另一方面也很难做到固定稳当,除非结构上万不得己,马达也可以通过打螺丝固定(马达上有专门打螺丝的孔)。
一般马达的正反转都可以使用,即改变电池的方向而得到正反两种转向(可以通过机械开关来改变,也可通过电子控制),也就是说一个马达可以得到两种不同的动作。
如:马达正转使四足行走的仿真动物前进,而马达反转,使得它停止并且摇尾巴、摇动等,这些动作的实现是通过一个齿轮传递转动的过程中,主动轮有一个切向用力的原理来实现转换的,即通过马达正方向转动带动一组齿轮,而在反转时又带动另一组齿轮工作。
可切向跳动的轴叫跳轴。
超载保护
对于连续工作的玩具,最大的可能会受到小孩强制性制动。
如把移动的汽车直接压在地面上,等等。
此时如果没有过载保护机构,就会使马达线圈中的电流成倍增加,从而导致马达发热,严重能导致起火。
所以一般都设有超载保护,最好的是皮带传动,但皮带传动在过载时又会过度摩擦皮带而降低皮带的寿命,所以一般都会再设有过载保护,而过载保护设计的原理一般都是利用某一传动带,使得在动作源过载时,某一齿轮能打滑或脱开动作源,从而保证马达仍然转动,但动作停止,如“S”片、跳轴等。
齿轮安装和复位机构马达齿轮的安装只有一个方法是正确的,那就是把压齿轮的力直接作用在轴上,也就是直接抵住铁轴末端把齿轮压入铁轴工作端上。
复位机构,因为马达是连续转动的,当动作源被抓死或其它方式发生错位时,一定要保证马达工作的下一个周期或几个周期内使动作能够复原到设计位置,一般都无需专门设计。
比如凸轮机构,是可以自行复位的,但如果是四杆机构,则有可能需要专门设计。