第3章凸轮机构与间歇运动机构
- 格式:ppt
- 大小:1.47 MB
- 文档页数:25
在各类机械中,常需要某些构件实现周期性的运动和停歇。
能够将主动件的连续运动转换成从动件有规律的运动和停歇的机构称为间歇运动机构。
而实现间歇运动的四种常用机构分别为:棘轮机构、槽轮机构、凸轮式间歇运动机构和不完全齿轮机构。
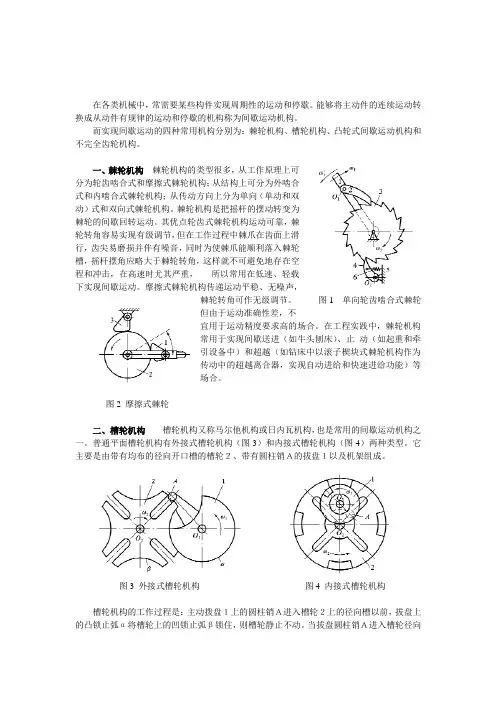
一、棘轮机构棘轮机构的类型很多,从工作原理上可分为轮齿啮合式和摩擦式棘轮机构;从结构上可分为外啮合式和内啮合式棘轮机构;从传动方向上分为单向(单动和双动)式和双向式棘轮机构。
棘轮机构是把摇杆的摆动转变为棘轮的间歇回转运动。
其优点轮齿式棘轮机构运动可靠,棘轮转角容易实现有级调节,但在工作过程中棘爪在齿面上滑行,齿尖易磨损并伴有噪音,同时为使棘爪能顺利落入棘轮槽,摇杆摆角应略大于棘轮转角,这样就不可避免地存在空程和冲击,在高速时尤其严重,所以常用在低速、轻载下实现间歇运动。
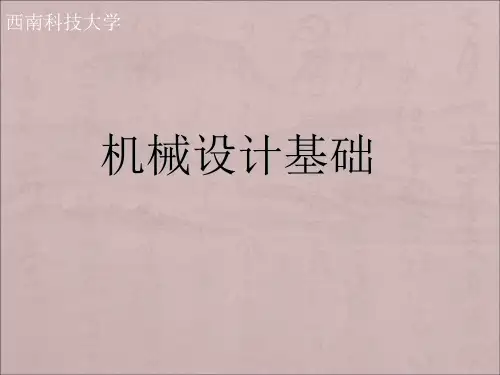
摩擦式棘轮机构传递运动平稳、无噪声,棘轮转角可作无级调节。
图1 单向轮齿啮合式棘轮但由于运动准确性差,不宜用于运动精度要求高的场合。
在工程实践中,棘轮机构常用于实现间歇送进(如牛头刨床)、止动(如起重和牵引设备中)和超越(如钻床中以滚子楔块式棘轮机构作为传动中的超越离合器,实现自动进给和快速进给功能)等场合。
图2 摩擦式棘轮二、槽轮机构槽轮机构又称马尔他机构或日内瓦机构,也是常用的间歇运动机构之一。
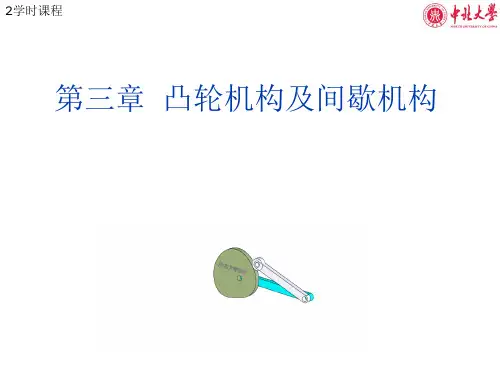
普通平面槽轮机构有外接式槽轮机构(图3)和内接式槽轮机构(图4)两种类型。
它主要是由带有均布的径向开口槽的槽轮2、带有圆柱销A的拔盘1以及机架组成。
图3 外接式槽轮机构图4 内接式槽轮机构槽轮机构的工作过程是:主动拨盘1上的圆柱销A进入槽轮2上的径向槽以前,拔盘上的凸锁止弧α将槽轮上的凹锁止弧β锁住,则槽轮静止不动。
当拔盘圆柱销A进入槽轮径向槽时,凸、凹锁止弧刚好分离,圆柱销可以驱动槽轮转动。
当圆柱销脱离径向槽时,凸锁止弧又将凹锁止弧锁住,从而使槽轮静止不动。
因此,当主动拨盘作连续转动时,槽轮被驱动作单向的间歇转动。
外接式槽轮机构的主动拨盘1与槽轮2转向相反;内接式槽轮机构的主动拨盘1与槽轮2转向相同,且传动平稳、占空间小,槽轮停歇时间较短。
凸轮间歇运动机构工作原理一、引言凸轮间歇运动机构是一种将旋转运动转化为间歇性直线运动的机构,其主要应用于自动化生产线中的物料输送、分拣和装配等工作。
本文将详细介绍凸轮间歇运动机构的工作原理。
二、凸轮间歇运动机构的组成部分凸轮间歇运动机构由凸轮、摆杆、从动件和固定件四个部分组成。
其中,凸轮是主要的传动元件,它通过旋转带动摆杆做往复直线运动,并使从动件在规定的时间内完成特定的工作。
三、凸轮间歇运动机构工作原理1. 凸轮的旋转当驱动电机启动时,通过传递装置驱使凸轮开始旋转。
在旋转过程中,凸轮上的曲面不断地与摆杆接触并推挤它做往复直线运动。
同时,从传递装置传递来的力也被传递到从动件上。
2. 摆杆做往复直线运动在接触到曲面后,摆杆依靠其自身惯性和弹性受力变形等因素,开始做往复直线运动。
这种运动的速度和方向都与凸轮的曲面形状和旋转速度有关。
3. 从动件完成特定的工作在摆杆做往复直线运动的同时,从动件也随之做出相应的运动。
通过合理设计凸轮曲面形状和摆杆长度、角度等参数,可以使从动件在规定时间内完成特定的工作,如物料输送、分拣和装配等。
4. 固定件起支撑作用固定件是凸轮间歇运动机构中不可或缺的一部分,它起到支撑和固定摆杆、从动件等组成部分的作用。
同时,固定件还可以通过调整位置和角度等参数来改变凸轮间歇运动机构的工作方式。
四、凸轮间歇运动机构的优缺点1. 优点(1) 凸轮间歇运动机构结构简单、可靠性高;(2) 凸轮曲面形状容易调整,适应性强;(3) 传递装置稳定,传递效率高;(4) 可以根据实际需要灵活设计和布置。
2. 缺点(1) 摩擦和磨损严重,需要定期维护保养;(2) 凸轮曲面形状复杂,制造成本较高;(3) 不能进行连续运动,只能进行间歇运动。
五、结论凸轮间歇运动机构是一种重要的机械传动装置,主要应用于自动化生产线中的物料输送、分拣和装配等工作。
其工作原理简单易懂,具有结构简单、可靠性高、适应性强等优点。
同时,也存在摩擦磨损严重、制造成本高等缺点。
《机械设计基础》习题解答目录第0章绪论-------------------------------------------------------------------1 第一章平面机构运动简图及其自由度----------------------------------2 第二章平面连杆机构---------------------------------------------------------4 第三章凸轮机构-------------------------------------------------------------6 第四章齿轮机构------------------------------------------------------- -----8 第五章轮系及其设计------------------------------------------------------19 第六章间歇运动机构------------------------------------------------------26 第七章机械的调速与平衡------------------------------------------------29 第八章带传动---------------------------------------------------------------34 第九章链传动---------------------------------------------------------------38 第十章联接------------------------------------------------------------------42 第十一章轴------------------------------------------------------------------46 第十二章滚动轴承--------------------------------------------------50第十三章滑动轴承------------------------------------------------ 56第十四章联轴器和离合器-------------------------- 59第十五章弹簧------------------------------------62第十六章机械传动系统的设计----------------------65第0章绪论12-3机器的特征是什么?机器和机构有何区别?[解] 1)都是许多人为实物的组合;2)实物之间具有确定的相对运动;3)能完成有用的机械功能或转换机械能。
《机械原理》期末复习资料第一章平面机构运动简图和自由度◆这种能实现确定的机械运动,又能做有用的机械功或完成能量、物料与信息转换和传递的装置称为机器。
◆无论机器还是机构,最基本的一点是都能实现确定的机械运动。
从结构和运动观点看,二者之间并无区别,所以统称为机械。
◆机械零件可分为两大类:一类是在各种机器中都能用到的零件,称为通用零件。
另一类则是在特定类型的机械中才能用到的零件,称为专用零件。
◆三个单元:装配单元、运动单元、制造单元1、零件:机械的制造单元,如螺钉、螺母、曲轴等。
通用零件:在各种机器中都能用到的零件。
专用零件:在特定类型的机器中才能用到的零件。
2、部件:由一组协同工作的零件组成的独立制造装配的组合件,如减速器、离合器、制动器等。
部件是装配的单元。
3、构件:机构中形成相对运动的各个运动单元。
可以是单一的零件,也可以是由若干零件组成的运动单元。
◆机器主要由5个部分组成,包括动力部分、控制部分、传动部分、执行部分、支撑及辅助部分。
◆机械设计的程序:1.计划阶段 2.方案计划阶段 3.技术设计阶段 4.技术文件编制阶段◆判断高低副两构件通过面接触形成的运动副,称为低副。
两构件通过点或线接触形成的运动副,称为高副。
◆自由度的计算公式:F=3n-2PL-PH◆复合铰链:两个以上构件在同一轴线处共同参与形成的转动副,称为复合铰链(两个转动副◆局部自由度:机构中与输出构件运动无关的自由度,称为局部自由度。
(可忽略)◆机构具有确定运动的条件:机构的构件之间应具有确定的相对运动。
(标箭头的都是原动件。
)✔原动件个数等于机构的自由度数。
若原动件数小于自由度数,则机构无确定运动。
若原动件数大于自由度数,则机构可能在薄弱处损坏。
第二章平面连杆机构◆铰链四杆机构的基本类型:曲柄摇杆机构:转动运动转变成往复摆动运动双曲柄机构:等速转动变为变速转动双摇杆机构:主动摇杆的摆动变为从动摇杆的摆动(补充)曲柄滑块机构:转动运动转换成往复直线运动,也可把往复直线运动转换成转动运动◆铰链四杆机构存在曲柄的条件:①机构中是否存在整转副;②选择哪个构件作为机架。
第3章凸轮机构一、判断题(正确T,错误F)1.凸轮机构出现自锁是由于驱动力小造成的。
()2.在凸轮从动件运动规律中,等速运动的加速度冲击最小。
()3.适用于高速运动的凸轮机构从动件运动规律为余弦加速度运动。
()4.基圆是凸轮实际廓线上到凸轮回转中心距离最小为半径的圆。
()5.若要使凸轮机构压力角减小,应增大基圆半径。
()6.凸轮机构的从动件按简谐运动规律运动时,不产生冲击。
()二、单项选择题1. 设计凸轮机构,当凸轮角速度和从动件运动规律已知时,则。
A.基圆半径越大,压力角越大B.基圆半径越小,压力角越大C.滚子半径越小,压力角越小D.滚子半径越大,压力角越小2. 凸轮机构的从动件选用等加速等减速运动规律时,其从动件的运动。
A.将产生刚性冲击B.将产生柔性冲击C.没有冲击D.既有刚性冲击又有柔性冲击3. 在设计直动滚子从动件盘形凸轮机构时,若发生运动失真现象,可以。
A.增大滚子半径B.减少基圆半径C.增大基圆半径D.增加从动件长度4. 在下列凸轮机构中,从动件与凸轮的运动不在同一平面中的是。
A.直动滚子从动件盘形凸轮机构B.摆动滚子从动件盘形凸轮机构C.直动平底从动件盘形凸轮机构D.摆动从动件圆柱凸轮机构5. 与连杆机构相比,凸轮机构最大的缺点是。
A.设计较为复杂B.惯性力难以平衡C.点、线接触,易磨损D.不能实现间歇运动6. 有限值的突变引起的冲击为刚性冲击。
A.位移B.速度C.加速度D.频率7.对于转速较高的凸轮机构,为减小冲击振动,从动件运动规律宜采用运动规律。
A.等速B.等加速等减速C.正弦加速度8.若从动件的运动规律为等加速等减速运动规律、简谐运动规律或正弦加速度运动规律,当把凸轮转速提高一倍时,从动件的加速度是原来的倍。
A. 1B. 2C. 4D. 89.当凸轮基圆半径相同时,采用适当的从动件导路偏置可以凸轮机构推程的压力角。
A.减小B.增加C.保持原来10.滚子从动件盘形凸轮机构的滚子半径应凸轮理论廓线外凸部分的最小曲率半径。
机械设计基础习题集20229班级姓名学号2011.9绪论1.机构与机器具有的共同特征为:(1)它是若干人为实体的;(2)各实体之间具有;而机器还具有:(3)能代替人类完成有用的特征。
2.构件和零件不同:(1)零件是组成机构的单元;(2)构件是组成机构的单元。
构件可以是一个零件,也可以是多个零件的刚性组合。
第一章平面机构的运动简图及自由度一、填空题:1.两构件通过接触形成的运动副称为低副。
低副又分和2.两构件通过或接触形成的运动副称为高副。
3.构件系统成为机构的必要充分条件为构件系统的自由度F,且原动件件数构件系统的自由度数。
4.所有构件均在运动的机构称为平面机构。
5.由运动副联接组成的构件系统(A,一定,B,不一定,C,一定不)是机构。
二、分析图示机构的构件数、运动副类型和数目;计算其自由度,并指出机构中是否有复合铰链、局部自由度和虚约束?2三、绘制下图所示装置的机构简图。
三、绘制下图冲压机的机构简图,计算其自由度,并分析图示机构是否可行?3第二章平面连杆机构一、填空题:1.格拉肖夫判别式是指:铰链四杆机构中最短杆与最常杆长度之和其他两杆长度之和。
2.机构的压力角指:从动件上某点所受的方向与该点的方向所夹锐角,设计机构时注意控制最大压力角αma某许用压力角。
3.机构传动角γ指:压力角的,γ值愈愈好,理想情况γ=4.机构处于死点位置时,机构的压力角α=度。
5.在杆长不等的铰链四杆机构中,若L1=L2=L36.在杆长不等的铰链四杆机构中,若L1=L2=L3>L4,且四边长顺序铰接,则:以L4为机架时,该机构是机构;以L3为机架时,该机构是机构;以L2为机架时,该机构是机构。
7.曲柄摇杆机构中,曲柄为主动件。
当从动件处于两极限位置时,(A,摇杆,B,曲柄,C,连杆)在该两位置时所夹的锐角为极位夹角。
8.曲柄摇杆机构中,当(A,曲柄,B,摇杆)为主动件,在曲柄与(A,机架,B,连杆)共线时,机构处于死点位置。