佳美(4缸)的四轮定位参数
- 格式:doc
- 大小:28.00 KB
- 文档页数:1
四轮定位的标准参数
四轮定位的标准参数包括:
1. 轴距:指车轮前后轴的轴心之间的距离,通常以毫米(mm)为单位。
2. 轴距前后翘:指汽车前后轴距在垂直方向上的差异,通常以毫米(mm)为单位。
3. 后轮距:指汽车后轮中心线之间的距离,通常以毫米(mm)为单位。
4. 翼子板高度:指车轮顶部到翼子板边缘的高度差异,通常以毫米(mm)为单位。
5. 前束角:指车轮前轴与车体中心线的夹角,通常以度数为单位。
6. 后束角:指车轮后轴与车体中心线的夹角,通常以度数为单位。
7. 前轮左右偏差:指前轮中心线与车体纵轴的偏差,通常以毫米(mm)为单位。
8. 后轮左右偏差:指后轮中心线与车体纵轴的偏差,通常以毫米(mm)为单位。
9. 车身倾角:指车身左右倾斜的角度差异,通常以度数为单位。
10. 轮胎对地角度:指轮胎与地面之间的接触角度,通常以度
数为单位。
四轮定位参数定义四轮定位参数是指在车辆定位系统中使用的四个参数,包括车辆位置(经度和纬度)、方向角、车速和时间戳。
这些参数对于实现精确的车辆定位至关重要,可以应用于导航系统、交通管理、车辆监控等领域。
车辆位置是指车辆的经度和纬度坐标,用于确定车辆在地球表面的具体位置。
通过全球定位系统(GPS)等技术,车辆可以精确地获得当前的经纬度信息。
这些信息不仅可以帮助车辆导航,还可以用于交通管理中的实时监控和路径规划。
方向角是指车辆当前行驶方向与参考方向之间的夹角。
方向角的测量可以基于车辆内部的陀螺仪或地磁传感器等设备。
通过方向角的变化,车辆可以实时调整行驶方向,确保安全驾驶。
此外,方向角还可以应用于车辆导航系统中,为用户提供准确的导航指引。
第三,车速是指车辆在单位时间内行驶的距离。
车速的测量可以通过车辆的车载传感器或GPS等设备进行。
车速信息对于交通管理和车辆监控非常重要,可以用于道路拥堵监测、交通信号优化等应用。
同时,在车辆导航系统中,车速信息也可用于实时估计到达目的地所需的时间。
时间戳是指车辆定位信息的时间戳记,用于标识定位信息的采集时间。
时间戳的精确性对于车辆定位系统至关重要,因为它可以确保定位信息的实时性和可靠性。
在交通管理中,时间戳可以用于监控交通流量和车辆行驶时间等信息,从而提供实时的交通状况。
四轮定位参数在车辆定位系统中扮演着重要角色。
车辆位置、方向角、车速和时间戳这四个参数相互关联,共同构成了车辆定位信息的完整性。
这些定位参数的准确性和可靠性对于车辆导航、交通管理和车辆监控等应用具有重要意义。
未来,随着技术的不断发展,四轮定位参数将会得到进一步优化和应用,为智慧交通和自动驾驶等领域带来更多的可能性。
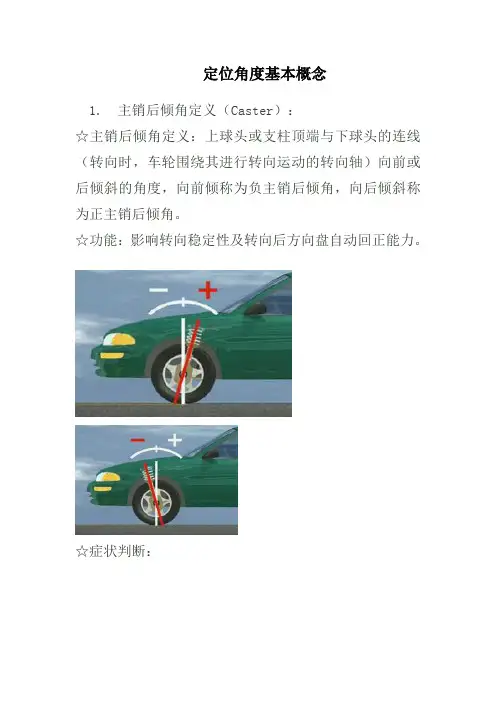
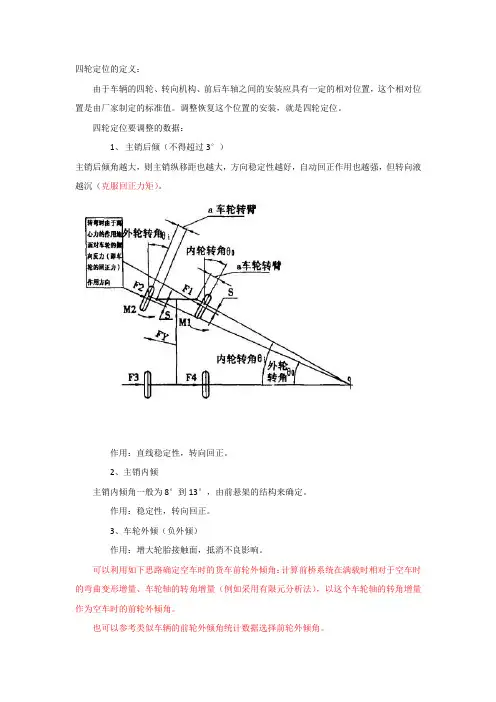
定位角度基本概念1. 主销后倾角定义(Caster):☆主销后倾角定义:上球头或支柱顶端与下球头的连线(转向时,车轮围绕其进行转向运动的转向轴)向前或后倾斜的角度,向前倾称为负主销后倾角,向后倾斜称为正主销后倾角。
☆功能:影响转向稳定性及转向后方向盘自动回正能力。
☆症状判断:(a) 主销后倾角太小造成不稳定:转向后缺乏方向盘自动回正能力:车速高时发飘(车辆在高速公路上行驶时应对此项予以充分重视)。
(b) 主销后倾角不对称造成跑偏:左、右两轮之主销后倾角不相等超过30′(0.5o)时车辆出现跑偏,跑偏方向主销后倾角较小的一侧。
☆案例左前轮主销后倾角设定为+0.5o,右前轮主销后倾角设定为+1.5o,刚这辆车向左跑偏。
☆主销后倾角调整手段:(1)垫片(2)偏心凸轮(3)长孔(4)支柱杆(5)支柱旋转(6)引擎托架移动(7)偏心球头2.车轮外倾角(Camber)☆车轮外倾角定义:轮胎的上沿偏向车辆内侧(朝向引擎、负外倾角)或外(偏离引擎、正外倾角)的角度。
☆功能:调整车辆负数作用于轮胎中心,消除跑偏,减少轮胎磨损。
☆症状判断:正外倾角太大的影响:(1)轮胎外侧单边磨损;(2)悬挂系统零件磨损加速;(3)车辆会朝着正外倾角较大的的一侧跑偏。
负外倾角太大的影响:(1)轮胎里侧单边磨损;(2)悬挂系统零件磨损加速;(3)车辆会朝着负外倾角较小的一侧跑偏。
☆案例:左前轮外倾角设定为1.0o,右前轮外倾角设定为0.5o,车辆向左跑偏(左右轮外倾角误差0.5o,车辆就出现跑偏)。
☆外倾角调整手段:(1)垫片(2)偏心凸轮(3)长孔(4)球头旋转(5)支柱旋转(7)楔形垫片(6)调整轴承座(8)偏心螺栓(7)偏心衬套(10)偏置球头3.前束角(Toe)☆前束角的定义: 从车辆的前方看,于两轮轴高度相同处测量左、右轮胎中心线之间的距离,车辆前端距离与后端距离差值称为前束角。
前端距离大于后端距离为负前束,反之为正前束。
四轮定位的四个参数
四轮定位的四个参数是车轮的前后左右位置,这些参数对于汽车行驶的稳定性和安全性起着至关重要的作用。
第一个参数是前后轴距,即前轮和后轮轴心之间的距离。
前后轴距的大小直接影响汽车的转向稳定性和通过障碍物的能力。
一般来说,轴距较长的汽车转向相对来说会更加平稳,通过障碍物的能力也更强。
第二个参数是前后轮距,即左、右前轮与左、右后轮轮心之间的距离差。
前后轮距的大小对于汽车的操控性和稳定性有着较大的影响。
前后轮距较大的汽车操控性相对来说更稳定,但是容易出现过度转向。
第三个参数是前后轮胎间的距离,即左、右前轮和左、右后轮之间的距离。
这个参数对于汽车的平稳性和转弯稳定性有着重要的影响。
轮胎间距较大的汽车在行驶过程中相对来说更加平稳,但是转弯时会出现较大的滑移。
第四个参数是左右轮距,即左、右前轮和左、右后轮之间的距离差。
左右轮距的大小对于汽车的平衡性和横向稳定性有着较大的影响。
左右轮距较大的汽车在行驶过程中相对来说更加平衡,但是在转弯时容易出现侧翻等危险情况。
以上四个参数的大小都会对汽车的操控性、稳定性、平衡性和安全性产生影响。
因此,在进行汽车定位时,需要准确测量这些参数,以保证汽车行驶的稳定性和安全性。
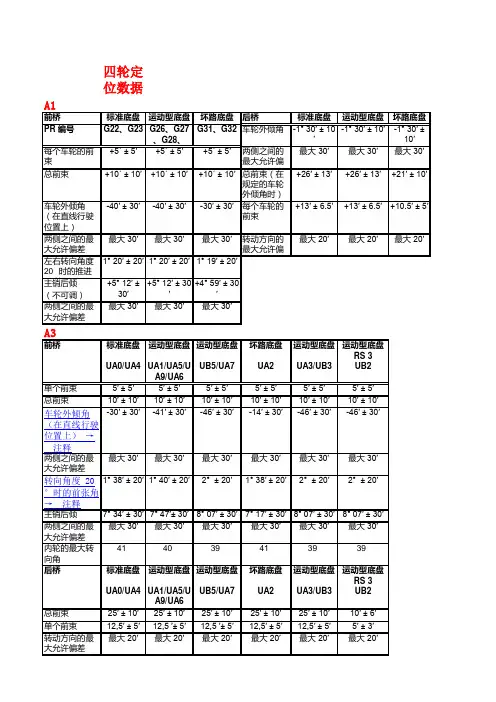
四轮定位数据A1前桥标准底盘运动型底盘坏路底盘后桥标准底盘运动型底盘坏路底盘PR 编号G22、G23G26、G27、G28、G29G31、G32车轮外倾角-1° 30′ ± 10′-1° 30′ ± 10′-1° 30′ ±10′每个车轮的前束+5´ ± 5′+5´ ± 5′+5´ ± 5′两侧之间的最大允许偏差最大 30′最大 30′最大 30′总前束+10´ ± 10′+10´ ± 10′+10´ ± 10′总前束(在规定的车轮外倾角时)+26′ ± 13′+26′ ± 13′+21′ ± 10′车轮外倾角(在直线行驶位置上)-40′ ± 30′-40′ ± 30′-30′ ± 30′每个车轮的前束+13′ ± 6.5′+13′ ± 6.5′+10.5′ ± 5′两侧之间的最大允许偏差最大 30′最大 30′最大 30′转动方向的最大允许偏差最大 20′最大 20′最大 20′左右转向角度20° 时的推进角 1)1° 20′ ± 20′1° 20′ ± 20′1° 19′ ± 20′主销后倾(不可调)两侧之间的最大允许偏差最大 30′最大 30′最大 30′+5° 12′ ±30′+5° 12′ ± 30′+4° 59′ ± 30′A4-B6前桥标准底盘(1BA )运动型底盘(1BE/1BV )运动型底盘(1BD ),标准底盘quattro GmbH RS 4(2MC )后桥标准底盘(1BA )运动型底盘(1BE/1BV )运动型底盘(1BD ),标准底盘quattro GmbH RS 4车轮外倾角- 47′ ± 25′- 47′ ± 25′- 51′ ± 25′车轮外倾角- 1° 20′ ±30′- 1° 20′ ± 30′- 1° 20′ ±30′两侧之间的最大允许偏差30′30′30′两侧之间的最大允许偏差30′30′30′每个车轮的前束(起始位置的设定值)+ 10′ ± 2′+ 10′ ± 2′+ 10′ ± 2′总前束+ 20′ ±10'5'+ 20′ ±10'5'+ 20′ ±10'5'每个车轮的前束(起始位置的校正值)+ 10′ ± 5′+ 10′ ± 5′+ 10′ ± 5′单个前束+ 10′ ±5'2.5'+ 10′ ±5'2.5'+ 10′ ±5'2.5'每个车轮的前束常量(设定值)+ 14′ ± 2′+ 14′ ± 2′+ 14′ ± 2′与汽车纵轴线最大许可的运行方向偏差10′10′7′每个车轮的前束常量(校正值)+ 14′ ± 7′+ 14′ ± 7′+ 14′ ± 7′两侧之间的前束常量偏差最大 10′最大 10′最大 10′20 度时的车轮转向偏差角。

四轮定位参数的调整一.项目目的与要求1.了解四轮定位参数的调整内容及范围2. 了解四轮定位参数调整的先后顺序3.掌握举升机的使用方法与注意事项4.掌握四轮定位参数的调整方法与注意事项二.项目所需的仪器设备、器材1.现在伊兰特轿车一辆。
2.立德立四轮定位仪一台、常用工具一套、剪式举升机。
三.项目安排1.项目时间:13学时。
2.项目组织:理论与实践一体化,统一讲解;分2组进行演示、观察并操作;分6组练习(边讲边做,讲讲做做,做做讲讲)。
3.项目安全纪律教育:遵守项目室守则与项目人员守则,不迟到不早退,听从教师与组长安排,不随意动手,规范操作练习。
4.上课要求:积极主动地学习、认真观察、勤思考、勤操作、勤记笔记,认真独立地完成作业。
四.操作注意事项1.四轮定位仪传感器是精密电子器件,要轻拿轻放,避免传感器掉在地上摔坏内部电路和元件并及时对其进行充电,未经老师允许,不得随便移动。
2.车轮卡具、制动踏板固定器和方向盘固定器在安装前一定要先清洁干净,避免油圬粘到汽车内饰和车轮钢圈上。
3.正确设置汽车自动档或手动档位。
除非设备操作规程要求车辆打到空挡。
4.车辆保持制动,除非操作规程要求车轮旋转。
5.车辆在举升台上时请用楔型块塞住车轮,避免车轮转动,滚出举升台。
6. 传感头的位置不能装错,否则将不能工作。
五.基本操作步骤(一).相关理论知识:有关本题目的相关信息可以查询汽车运用与维修专业的《汽车底盘构造与维修》第二章第三节和立德立四轮定位仪说明书里的相关内容。
1.四轮定位参数里调整的顺序是先后再,但是通常情况下除了可以调整之外,其他的参数都是视车型而定的。
2.前束值调整时,转向横拉杆伸长,前束值,反之,前束值。
3. 伊兰特轿车后轮前束的标准范围是,前轮前束的标准是,如果其数值在标准范围,屏幕上将显示底字,如果不是在标准范围,将显示底字。
4.前束值分两半,分别在和上调整。
调整后固定横拉杆,锁紧螺栓。
5.测出四轮定位参数后调整的步骤顺序为、、、,最后调整。
汽修中常见的四轮定位调整方法四轮定位调整是汽车维修中常见的一项技术,它可以帮助车辆保持正常的行驶性能和轮胎的磨损均衡。
下面将详细介绍四轮定位调整的一般步骤和具体方法。
一、前期准备1. 首先,需要准备一台四轮定位仪和相应的配件,例如传感器和调节工具。
2. 确保车辆停在平坦的地面上,并且轮胎压力符合要求。
3. 对车辆进行检查,确保悬挂系统和转向部件没有损坏或松动。
二、调整前轮的定位1. 先进行前轮的定位调整。
这是因为前轮对汽车的行驶方向和稳定性有着重要的影响。
2. 在进行调整前,先对前轮进行测量,包括前轮间的距离以及各自与车身的距离。
3. 根据测量结果,使用四轮定位仪调整前轮的定位。
主要调整参数包括前轮的踝节角度、前轮的总倾角(车轮倾斜度)、前轮的托角(车轮内外倾斜度)等。
三、调整后轮的定位1. 在完成前轮的调整后,进行后轮的定位调整。
后轮的定位主要影响到车辆的操控性和驾驶舒适性。
2. 测量后轮的距离和与车身的距离。
与前轮不同的是,后轮的距离可以有一定的调整范围。
3. 根据测量结果,使用四轮定位仪对后轮的定位进行调整。
主要调整参数包括后轮的踝节角度、后轮的总倾角、后轮的托角等。
四、调整轮胎的平衡状态1. 在完成轮胎定位调整后,还需要调整轮胎的平衡状态。
轮胎的平衡状态影响到行驶的平稳性和轮胎的磨损均衡。
2. 使用专用的平衡机对轮胎进行平衡检测。
平衡机会测量轮胎的重量分布情况,以及轮胎在转动过程中的不平衡表现。
3. 根据检测结果,使用配重钳在轮胎上粘贴或拆除配重块,以达到平衡状态。
五、测试和调整1. 在进行四轮定位调整后,进行测试,以确保调整后的轮胎和悬挂系统工作正常。
2. 测试时可以在平坦的道路上进行直线行驶,检查车辆是否有往左或往右偏离的情况。
3. 如果需要进一步调整,可以重新回到前面的步骤进行相关的调整操作。
六、记录和报告1. 在完成四轮定位调整后,将调整前后的参数和数据进行记录。
可以使用纸质或电子表格进行记录。
车轮定位角度是存在于悬架系统和各活动机件间的相对角度,保持正确的车轮定位角度可确保车辆直线行驶,改善车辆的转向性能,确保转向系统自动回正,避免轴承因受力不当而受损失去精度,还可以保证轮胎与地面紧密接合,减少轮胎磨损、悬架系统磨损以及降低油耗等。
汽车悬架系统主要定位角度包括:车轮外倾、车轮前束、主销后倾、主销内倾、推力角等。
图A 主销内倾及车轮外倾1.车轮外倾:在过车轮轴线且垂直于车辆支承平面的平面内,车轮轴线与水平线之间所夹锐角。
如图A所示,即由车前方看轮胎中心线与垂直线所成的角度,向外为正,向内为负。
其角度的不同能改变轮胎与地面的接触点,直接影响轮胎的磨损状况。
并改变了车重在车轴上的受力分布,避免轴承产生异常磨损。
此外,外倾角的存在可用来抵消车身载重后,悬架系统机件变形所产生的角度变化。
外倾角的存在也会影响车的行进方向,因此左右轮的外倾角必须相等,在受力互相平衡的情况下不致影响车辆的直线行驶,再与车轮前束配合,使车轮直线行驶并避免轮胎磨损不均。
四轮定位仪测量车轮外倾角的范围为±10°。
图B 车轮前束2.车轮前束:车轮前束如图B所示,同一轴两端车轮轮辋内侧轮廓线的水平直径的端点为等腰梯形的顶点,等腰梯形前后底边长度之差为前束。
当梯形前底边小于后底边时,前束为正,反之则为负。
车轮的水平直径与车辆纵向对称平面之间的夹角为前束角。
由于车轮外倾及路面阻力使前轮有向两侧张开做滚锥运动的趋势但受车轴约束,不能向外滚动,导致车轮边滚边滑,增加了磨损,通过前束可使车轮在每瞬间的滚动方向都接近于正前方,减轻了轮毂外轴承的压力和轮胎的磨损。
四轮定位仪测量车轮前束角的范围为±6°。
图C 主销后倾3.主销后倾:主销后倾如图C所示,过车轮中心的铅垂线和真实或假想的转向主销轴线在车辆纵向对称平面的投影线所夹锐角为主销后倾角,向前为负,向后为正。
主销后倾角的存在可使车轮转向轴线与地面的交点在轮胎接地点的前方,可利用地面对轮胎的阻力产生绕主销轴线的回正力矩,该力矩的方向正好与车轮偏转方向相反,使车辆保持直线行驶。
四轮定位基本概念一、主销后倾角定义:上球头或支柱顶端与下球头的连线(转向时,车轮围绕其进行转向运动的转向轴)在几何中心线方向,向前或向后倾斜的角度。
向前倾斜称为负主销后倾角,向后倾斜称为正主销后倾角。
功能:影响转向稳定性及转向后方向盘自动回正能力主销后倾角的影响:症状判断:1、主销后倾角太小造成不稳定:2、转向后缺乏方向盘自动回正能力;3、车速高时发飘(车辆在高速公路上行驶时,应对此项予以充分重视)4、主销后倾角不对称造成跑偏:5、左、右两轮之主销后倾角不相等超过40′(0.67°)时车辆容易出现跑偏,跑偏方向朝向主销后倾角较小的一侧。
若主销向前顷不叫主销前顷角,叫主销后倾角为负值。
主销内倾角定义:由车辆前方观察,转向轴线与铅垂线所成的夹角。
主销内倾角对绝大多数的车辆来说都是不可调整的角度。
主销内倾角的作用:使前轮自动回正,转向轻便,并减小汽车行驶时路面通过车轮传给转向机构的冲击力。
车轮外倾角定义:轮胎的上沿偏向车辆内侧(朝向引擎、负外倾角)或外侧的角度。
车轮中心平面和垂直面的夹角,前轮在转向装置位于中心位置时测量,后轮在正前打直位置测量(四轮转向)车轮外倾角功能:调整车辆负载作用于轮胎的中心,消除跑偏,减少轮胎磨损。
外倾角的影响:正外倾角太大的影响:(1)轮胎外侧单边磨损;(2)悬挂系统零件磨损加速;(3)车辆会朝着正外倾角较大的的一侧跑偏。
负外倾角太大的影响:(1)轮胎里侧单边磨损;(2)悬挂系统零件磨损加速;(3)车辆会朝着负外倾角较小的一侧跑偏。
正的轮胎外倾角负的轮胎外倾角,不叫轮胎内顷角四、前束角束角的定义:从车辆后方看,左右轮胎垂直中心线与车轴等高水平中心线相交的两点距离与转到前方180度同一两点间距离的差值称为前束值。
前端距离大于后端距离为负前束,总前束是由左右两个车轮的分前束角之和来计算的,是以车轮几何中心线为基准的;单独前束是指车辆中心线与单个车轮旋转平面间的夹角。
功能:降低轮胎磨损与滚动磨擦。