基于DSP的线阵CCD数据采集系统的设计
- 格式:doc
- 大小:620.50 KB
- 文档页数:41

基于DSP的CCD信号采集控制系统设计章顺喜【期刊名称】《物联网技术》【年(卷),期】2014(4)1【摘要】The design process of CCD signal acquisition circuit is introduced, in which the shift pulse that the CCD internal vertical shifting register requires is produced by MCU, and the CCD level shift pulse and reset pulse are produced by TMS320LF2407A chip. The circuit of analog to digital conversion and data storage is designed after the CCD output signal, and the data transmission between DSP and FIFO is controlled by the DSP and MCU. So that the processing of CCD signal is realized and the objective is measured.%介绍了CCD信号采集电路的设计过程,该设计由单片机产生CCD 内部垂直移位寄存器工作所需的转移脉冲,并由TMS320LF2407A芯片产生CCD 水平移位脉冲和复位脉冲,然后在CCD输出信号之后设计了模数转换和数据存储电路,再由DSP和单片机共同控制DSP和数据存储FIFO之间的数据读取,从而可以实现DSP对CCD信号的处理,最终实现对目标的测量。
【总页数】3页(P31-33)【作者】章顺喜【作者单位】杭州电子科技大学电子信息学院,浙江杭州 310018【正文语种】中文【中图分类】TN79【相关文献】1.基于CPLD的线阵CCD信号采集系统设计 [J], 董勇;瑚琦;高鹏飞2.用基于DSP的线阵CCD实现二维图像信号采集的系统设计 [J], 田岩涛;常丹华;潘普丰;张彦3.基于光纤光谱仪的CCD信号采集和传输系统设计 [J], 刘宇;黄川;李东波4.基于ARM7的线阵CCD信号采集系统设计 [J], 陈力;邹洁;刘永智;龙再川5.基于ARM和FPGA的CCD信号采集系统设计 [J], 袁风永;陈惠明;朱东南;张蕉蕉因版权原因,仅展示原文概要,查看原文内容请购买。
基于DSP 的线阵CCD 测量系统江南大学通信与控制工程学院(214036) 周国欣 钱 强摘 要 文章介绍了一种基于DSP 技术的线阵CCD 测量系统。
在讲述了CCD 光采集和ADC 的工作原理之后,结合DMA 技术,以TMS320VC5410为例,介绍了DSP 存储器双缓冲区工作原理及其在线性CCD 测量系统中的应用。
最后对DSP 与主机间的通信进行了陈述。
关键词 DSP 线阵CCD DMA A/D 转换 CCD (电荷耦合器件)是1970年研制成功的一种新型半导体光学成像器件。
由于它体积小、高分辨率、高精度、稳定性好、抗震动、抗电磁干扰等优点,已在工件尺寸测量、工件表面质量检测、物体热膨胀系数检测、图像传真、摄像机以及智能传感器等方面得到了广泛地应用。
这大大地促进了CCD 的发展。
人们也相应地研究了许多处理CCD 信号的方法,如处理线性CCD 的小波分析法、重心法等。
这些方法对处理CCD 信号的处理器提出了很高的要求。
显然,寻找满足这些要求的处理器已成当务之急。
DSP (数字信号处理器)是一种具有高速性、实时性和丰富的芯片内部资源的处理器,它的出现为人们解决这个难题提供了一条新的道路。
本文将以TMS320VC5410DSP 为例,结合MAX153ADC ,介绍DSP 在线性CCD 测量系统中的应用。
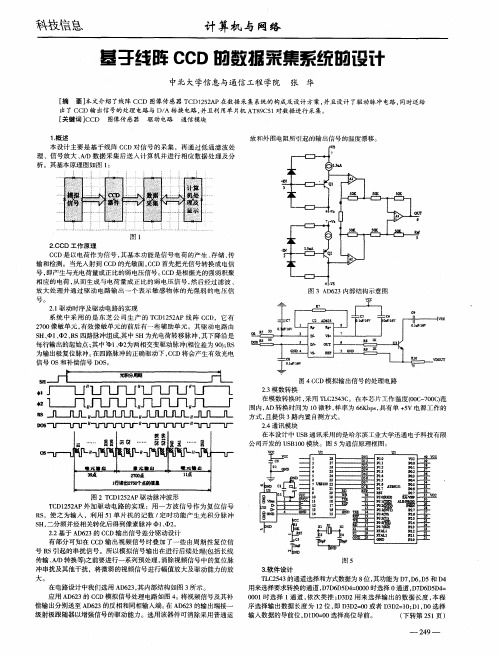
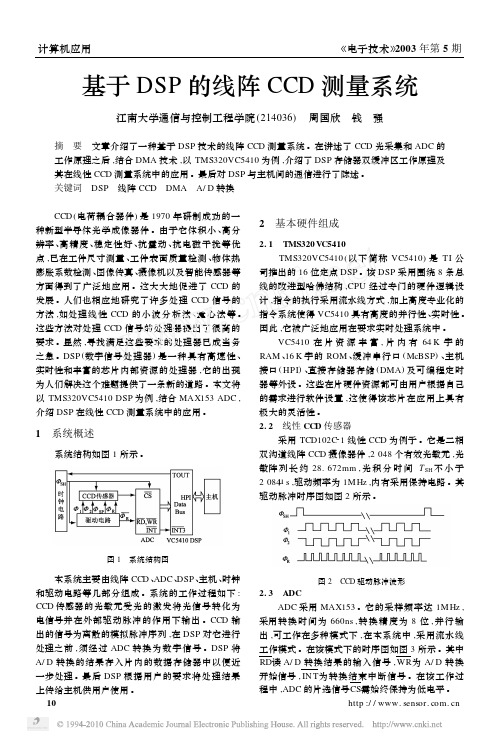
1 系统概述系统结构如图1所示。
图1 系统结构图 本系统主要由线阵CCD 、ADC 、DSP 、主机、时钟和驱动电路等几部分组成。
系统的工作过程如下:CCD 传感器的光敏元受光的激发将光信号转化为电信号并在外部驱动脉冲的作用下输出。
CCD 输出的信号为离散的模拟脉冲序列,在DSP 对它进行处理之前,须经过ADC 转换为数字信号。
DSP 将A/D 转换的结果存入片内的数据存储器中以便近一步处理。
最后DSP 根据用户的要求将处理结果上传给主机供用户使用。
2 基本硬件组成2.1 TMS320VC5410TMS320VC5410(以下简称VC5410)是TI 公司推出的16位定点DSP 。


基于TMS320C6711的线阵CCD采集与处理系统基于TMS320C6711的线阵CCD采集与处理系统摘要:一种基于DSP的CCD采集与处理系统。
在该系统中DSP (TMS320C6711)进行高速、大数据量的数字信号处理、MCU (89C52)完成人机界面处理。
文中给出该系统在生物医学工程中的应用:静止悬浮式激光散射法血细胞分类计数仪中光电信号的采集和处理。
将该系统做适当修改,同样也可适用于其它光电信号的采集处理。
关键词:TMS320C6711CCD89C52数据采集数据处理引言TMS320C6711是TI公司推出的DSP芯片。
其数据处理功能非常强大,时钟速度可大100M(或者150M),但是其I/O功能要求有限。
因此,采用MCU(89C52)作为人机接口,构成双CPU(MCU 和DSP)系统。
1系统构成本文所介绍的CCD采集系统是在32位浮点DSP(TMS320C6711)上实现的。
如图1所示:单片机89C52负责接受键盘输入,并在液晶显示器上显示处理的结果信息;CCD在光点转换后的数据通过A/D转换器后在异步FIFO中缓存;DSP是系统的信息处理中心,它读取FIFO中的数据后经过处理,将结果传给89C52,由液晶显示器显示信息。
DSP(TMS320C6711)是整个硬件系统的信号处理中心。
它接受CCD传来的采集信号,加以处理并将结果传给单片机。
DSP还完成对Flash和SDRAM的控制。
MCU(89C52)主要充当人机界面的角色,接受外部键盘的输入,将DSP传输未来的结果用数据和图文的形式在液晶显示器上显示出来。
*8KB的可编程FlashMemory;*可以写/擦1000次以上;*内置256×8位RAM;*32个可编程I/O口。
图3信号双向缓冲器隔离图由于DSP计算能力很强,但I/O控制能力有限,因此89C52的以上性能可以保障系统控制能力,提供人机接口之便。
CCD(TCD132D)是一种新型的固体成像器件。
第二章基于DSP的CCD在线检测系统的研究第二章智能验布系统2.1智能验布装置的基本原理验布就是对各种布匹进行检验、分级、成卷与包装,检验的任务就是对前面各工序成果进行全面的检验与总结,并及时反馈质量信息以便进一步改进,对后面工序则提供相关织物的质量、等级等全面状况,以便针对不同情况,做相应处理。
验布装置由给布机构、导布机构、检验机构、成型机构等部分组成,如图2-1所示。
给布机构使待验的布卷稳定顺畅地引出,对织物和设备尽量减少拉伸、摩擦和磨损。
导布机构其主要功能是给从布卷引出的张力控制在适当的范围,给布匹以适当的张力,使布匹平整,减少长度测量误差。
检验机构是验布机的核心装置,也是验布机发展空间最大的装置,并可以进行张力检测、信号反馈和电气的连动控制,包括验布台、灯箱(上、下灯箱)、测长装置、标记装置、记录装置、数据统计和输出装置等,验布工作中的瑕疵判断、记录和数据的统计等均由这些装置或通过在这些装置上的工作来完成。
当检测到疵点时,记疵装置在布匹上打上记号,以使人工进行修复。
成型机构指验布后的成卷和卷装形式,还有其他的辅助机构。
本装置最主要的是检验机构,采用CCD视觉传感、DSP信号处理、USB数据传送、图象处理和识别、应用软件开发等技术。
图2-1验布系统结构图第三章基于DSP的CCD在线检测系统的研究此外,还要确保图像的亮度应处于光电器件转换特性允许的范围内,保证转换后图像信息不失真。
如果光学图像的亮度在时间坐标上有变化,按照采样原理,CCD在时间坐标上对光学图像的采样频率应保证大于和等于2倍的图像对时间变化的最高频率。
由此可以确定CCD器件允许的最小光积分时间。
3.5.2CCD型号的选择及其主要性能参数3.5.2.1CCD型号的选择本课题基于图像在线检测,基于精度要求和经济性,CCD器件选用TCDl206器件,它的像元尺寸为14um,能满足采样定理和测量精度的要求。
TCDl206的主要性能参数:1.光敏像元数:21602.像元中心距:14uIll3.像元尺寸:14umXl4tzm4.光谱范围:250nm~1100nm5.响应度(R):45V/Lx·sec6.总体传输效率:>92%7.驱动频率:1MHz8.动态范围:1700:19.输出幅度:>1.7V图3.7线阵CCD—TCDl20610.工作温度:0~60℃11.供电电源:12V12.功耗:140mW3.5.2.2TCDl206的基本结构TCDl206是二相电极的双沟道线型CCD,其实物图3-7所示,其结构原理如图3-8所示。
文章编号:1002-2082(2005)06-0008-04用基于D S P 的线阵C C D 实现二维图像信号采集的系统设计田岩涛1,常丹华1,潘普丰1,张彦2(1.燕山大学信息科学与工程学院,河北秦皇岛066004;2.河北冀诚电子有限公司,河北石家庄050091)摘要:对光电转换系统,尤其是采集信号的后处理进行了研究。
介绍了在光电精密数据采集处理中通过D S P用硬件实现对C C D 信号的采集和处理过程。
给出了对C C D 信号进行边缘识别的微分算法和将线阵C C D 信号进行组合,恢复出二维图像信号的算法。
同时还给出了详细的硬件处理电路。
重点介绍了D S P 与F I F O 的数据传输、D S P 与U SB 的接口电路。
解决了一般情况下系统无法做到的用线阵C CD 实现二维图像信号复原的问题。
通过实验,证明了该方法的有效性。
线阵C C D 信号是以若干线段的形式存在的,特别适用于激光雕刻机图像采集系统,应用前景广阔。
关键词:线阵C C D ;二维图像信号采集;数字信号处理;F I F O 中图分类号:T N 386.5文献标识码:AR e a l i z a t i o no f 2-Di m a g e s i g n a l a c q u i s i t i o nw i t hD S P -b a s e dl i n e a r a r r a y C C DT I A N Y a n -t a o 1,C H A N G D a n -h u a 1,P A N P u -f e n g 1,Z H A N G Y a n2(1.C o l l e g e o f I n f o r m a t i o nS c i e n c e a n dE n g i n e e r i n g ,Y a n s h a nU n i v e r s i t y ,Q i n h u a n g d a o 066004,C h i n a;2.H e b e i G e m -T e c hE l e c t r o n i c s C oL t d ,S h i j i a z h u a n g 050091,C h i n a)A b s t r a c t :T h e o p t i c a l -t o -e l e c t r i c a lc o n v e r s i o n s y s t e m s ,e s p e c i a l l y t h e p o s t -p r o c e s s i n g f o rt h e a c q u i s i t i o n s i g n a la r e i n v e s t i g a t e d .T h ep r o c e s so f C C D s i g n a l a c q u i s i t i o na n dp r o c e s s i n gr e a l i z e db yac e r t a i nD S P -b a s e dh a r d w a r ed u r i n gt h e o p t o e l e c t r o n i c d a t a a c q u i s i t i o np r o c e s s i n gi s i n t r o d u c e d .T h e d i f f e r e n t i a l a l g o r i t h m f o r e d g e r e c o g n i t i o no f C C D s i g n a l a n d t h ea l g o r i t h m f o rc o m b i n i n gt h el i n e a ra r r a yC C D s i g n a l st or e s t o r et h e 2-D i m a g es i g n a l sa r eg i v e n .A n dt h ed e t a i l e d h a r d w a r e p r o c e s s i n gc i r c u i t i s p r o v i d e d .T h e d a t a t r a n s m i s s i o nb e t w e e nD S Pa n dF I F O ,a n dt h e i n t e r f a c e c i r c u i t b e t w e e n D S Pa n dU S Ba r e e m p h a t i c a l l yi n t r o d u c e d .T h e p r o b l e m o f t h e 2-D i m a g es i g n a l r e s t o r a t i o n ,w h i c hi s i m p o s s i b l ef o r t h e s y s t e m t os o l v e w i t ho r d i n a r y t e c h n o l o g y ,w a s s o l v e d w i t ht h i s t e c h n o l o g y .F i n a l l y ,t h e v a l i d i t y o f t h e m e t h o d i s p r o v e d b y t h e e x p e r i m e n t s .S i n c e t h e l i n e a r a r r a yC C Ds i g n a l i s s t o r e di nt h e f o r m o f s e v e r a l l i n e s ,t h e m e t h o di s e s p e c i a l l ys u i t a b l e f o r i m a g e a c q u i s i t i o ns y s t e m o f l a s e r c a r v e r.K e yw o r d s :l i n e a r a r r a yC C D ;2-Di m a g e s i g n a l a c q u i s i t i o n ;D S P ;F I F O引言电荷耦合器件(C h a r g eC o u p l eD e v i c e ,C C D )是一种新型光电转换器件。
1 绪论1.1 数据采集的历史与现状数据采集系统是用计算机控制的多路数据自动检测或巡回检测,并且能够对数据实行存储、处理、分析计算,以及从检测的数据中提取可用的信息,供显示、记录、打印或描绘的系统。
数据采集系统是建立在数字信号处理的基础之上,数字信号处理是一门新兴的学科,其科学体系时间里在20世纪40年代,迅速发展于20世纪60年代,其主要标志是两项重大进展,即傅立叶变换的快速算法的提出和数字滤波器设计方法的完善。
在20世纪40年代至50年代建立的取样数据系统理论,是数字信号处理理论的前身,但它只是现行连续系统理论的拓展。
20世纪50年代末至年代初,数字计算机开始应用于信号处理,数字信号处理理论的研究才真正开始得到快速发展。
到20世纪70年代,数字信号处理已经发展成为一门不再依赖于模型方法和模拟实验而独立发展的学科。
20世纪80年代以后,特别是在90年代,数字信号处理的理论和技术更加成熟,它开始渗透到许多学科领域,并于语音、图像、通信等信息产业紧密结合,不断地在理论上有所创新,在技术上有所突破,开辟了许多新的学科分支[3]。
1.2 CCD测距的历史与现状CCD测距技术作为一种能有效实现非接触的测量技术,被广泛应用于尺寸、位移、距离、表面形状检测和温度检测等领域。
由CCD传感器、光学成像系统、数据采集和处理系统构成的距离测量装置,具有测量精度高、速度快、应用方便灵活等特点,是现有机械式、光学式、电磁式测距仪器所无法比拟的。
在距离测量中,通常采用合适的照明系统使被测物体通过物镜成像在CCD靶面上,通过对CCD输出的信号进行适当处理,提取测量对象的几何信息,结合光学系统的变换特性,可计算出距离。
近年来,将CCD技术和莫尔条纹、数字全息、电子斑点干涉等技术相结合以精确测量微小尺寸的技术正成为一种具有很大潜力的研究发展方向。
综上所述,CCD应用技术已成为集光学、电子学、精密机械与计算机技术为一体的综合性技术,并被广泛应用于现代光学和光电测试技术领域。
事实上,凡可用胶卷和光电检测技术的地方几乎都可以应用CCD。
随着半导体材料与技术的发展,特别是超大规模集成电路技术的不断进步,CCD图像传感器的性能也在迅速提高,将CCD技术、计算机图像处理技术与传统测量方法相结合,能获取被测对象的更多信息,实现快速、准确的无接触测量,显著提高测量技术水平和智能化水平,因此,CCD技术必将以其突出的优点而在工业测控、机器视觉、多媒体技术、虚拟现实技术及其他许多领域得到越来越广泛的应用。
1.3 课题的提出在工业生产和军事应用中,测量目标距离是非常常用的。
最初都是用量具由人工进行接触性测量,这种测量方法速度慢,精度不高,受外界环境因素影响较大,并且在很多情况下—例如:测量敌方目标距离,测量高空飞行的飞行器等,并不能直接用量具测量。
自从感光器件发明之后,非接触测量方法得到了很好的发展,但是,在普遍应用的非接触测量系统中,仍然存在一定的局限性。
传统方法都是用外部设备将测量数据采集之后传送至计算机,再由计算机进行后续的处理。
这种方法具有处理数据能力强,处理方法比较灵活,可视化强,易于存储等优点。
与此同时,这种方法具有一定的局限性:这种方法对计算机接口速度要求较高,实时性不强,不利于设备的小型化、生产线本身的自动化,在野外环境、恶劣环境中不适于使用计算机。
数字信号处理器(Digital Signal Processor)DSP芯片是一种特别适合于进行数字信号处理运算的微处理器,其主要应用是实时快速地实现各种数字信号处理算法。
高速数字信号处理器是当前信息产业的热点技术之一,采用最先进的DSP无疑会使所开发的产品具有更强大的市场竞争力。
为了使非接触实时测量系统本身具有数据处理能力,脱离计算机的束缚,实现设备的小型化、提高灵活性,设计了基于DSP的CCD数据采集系统。
1.4 设计的意义论文介绍了一种基于DSP芯片的CCD在线数据采集系统,提出了以DSP作为CCD信号处理器,设计了一个可以脱离计算机的独立的数据采集系统。
由于DSP芯片的应用,使得测量系统具备了小型化、低功耗、便携等优点。
这个系统可以应用在很多不适合利用计算机处理数据的场合,例如野外操作。
由于DSP软件的灵活性,所以系统的硬件结构具有很高的通用性和灵活性,只需对DSP内部软件进行修改、重新烧写,就可以利用同一块电路板实现不同的目的,例如:直径测量、距离测量、工件计数等功能。
1.5 设计的基本方案线阵CCD用于物体尺寸精密测量是一种非常有效的非接触型的精密检测技术,由于它具有非接触无磨损、测量精度高、速度块、实时性强并易与计算机进行数据交换等特点,因此被广泛应用于各种物体外形尺寸的在线自动测量、物体位置的自动测量、物体旋转角度的自动测量等。
CCD器件由于其它体积小、分辨率高、精度高、稳定性好、抗震动、抗电磁干扰等优点,已在工件尺寸测量、工件表面质量检测、物体热膨胀系数检测、图像传真、摄像机以及智能传感器等方面得到了广泛地应用。
对于CCD采集信号的处理,目前有很多种方法。
DSP作为专用的数字信号处理芯片应用于CCD信号的处理,可以实现在线实时高速测量。
将DSP处理系统与输入输出系统结合,可以使普通测量系统脱离对于计算机的依赖,摆脱长距离信号传输的干扰问题和计算机接口速度的瓶颈。
DSP(数字信号处理器)是一种具有高速性、实时性和丰富的芯片内部资源的处理器,它的出现为人们解决这个难题提供了一条新的道路。
论文以型号为FMS320F206PZA的DSP为例,结合A/D技术和CPLD应用技术,介绍了DSP在线阵CCD测量系统中的应用。
1.6 本设计的主要工作1)在理论分析的基础上,提出了以DSP为数据处理核心单元的CCD数据采集系统解决方案,并结合可编程逻辑器件(FPGA/ CPLD)技术和DSP应用技术全面分析了系统的可行性与实用性。
2)设计了数据采集系统中应用的线阵CCD—TCD1206SUP器件的驱动电路、A/D数字化电路、存储电路、围绕着TI公司TMS320F206芯片的DSP数据处理电路。
电路中采用了现场可编程数字逻辑器件CPLD器件EPM7128作为硬件设计载体,有利于电路板的调试和小型化。
3)利用CCS软件开发了DSP芯片内部信号处理程序,使其实现CCD的数据采集、数据处理、结果显示和超限报警等功能。
2 主要芯片的工作原理及选取2.1 CCD工作原理电荷藕合器件图像传感器CCD(Charge Coupled Device),它使用一种高感光度的半导体材料制成,能把光线转变成电荷,通过模数转换器芯片转换成数字信号,数字信号经过压缩以后由相机内部的闪速存储器或内置硬盘卡保存,因而可以轻而易举地把数据传输给计算机,并借助于计算机的处理手段,根据需要来修改图像。
CCD由许多感光单位组成,通常以百万像素为单位。
当CCD表面受到光线照射时,每个感光单位会将电荷反映在组件上,所有的感光单位所产生的信号加在一起,就构成了一幅完整的画面。
CCD图像传感器可直接将光学信号转换为模拟电流信号,电流信号经过放大和模数转换,实现图像的获取、存储、传输、处理和复现[4]。
其显著特点是:1.体积小重量轻;2.功耗小,工作电压低,抗冲击与震动,性能稳定,寿命长;3.灵敏度高,噪声低,动态范围大;4.响应速度快,有自扫描功能,图像畸变小,无残像;5.应用超大规模集成电路工艺技术生产,像素集成度高,尺寸精确,商品化生产成本低。
因此,许多采用光学方法测量外径的仪器,把CCD器件作为光电接收器。
本设计研究过程中采用的是TCD1206SUP,这是从TCD1206SUP的基本结构、工作原理及特性参数等方面考虑的。
2.1.1TCD1206SUP的基本结构TCD1206SUP是具有高灵敏度、低暗电流,2160像元的CCD图像传感器。
本传感器可用于传真、图像扫描。
它包含一列2160像元的光电二极管,当扫描一张B4的图纸时,可达到28线/毫米(200DPI)的精度。
它在TTL脉冲下工作,电源为12V。
其特性如下:1)像敏单元数目:2160像元2)像敏单元大小:14um×l4um,中心距为14um3)光敏区域:采用高灵敏度、低暗电流的PN结作为光敏单元4)时钟:二相(5V)5)封装:采用22脚DIP封装C1 时钟(第一相)DOS 补偿输出C2 时钟(第二相)OD 电源SH 转移栅SS 地RS 复位栅NC 没有连接OS 信号输出表2.1 TCD1206管脚定义下图为TCD1206SUP芯片引脚图:图2.1 TCD1206SUP芯片管脚图TCD1206SUP由2236个PN结光电二极管构成光敏单元阵列,其中前64个和后12个是用做暗电流检测而被遮蔽的,图中用符号Di(i=0,1,2⋯)表示;中间的2160个光电二极管是曝光像敏单元,图中用Si(i=0,l,2⋯)表示。
每个光敏单元的尺寸为14um长、14um高,中心距离为14um,光敏元阵列总长为30.24mm。
光敏单元阵列的两侧是用作存储光生电荷的MOS电容存储栅。
MOS电容存储栅的两侧是转移栅电极SH,转移栅电极的两侧为CCD模拟移位寄存器,其信号输出部分由输出放大器单元的OS端输出,并在补偿输出单元的DOS端输出补偿信号[5]。
图2.2 TCD1206SUP芯片内部结构图2.1.2 TCD1206SUP的工作原理TCD1206SUP在如下图所示的驱动脉冲作用下工作。
图中当SH脉冲为高电平时,CR1脉冲亦为高电平,其下均形成深势阱。
这样,SH的深势阱使CR1电极下的深势阱与MOS电容存储势阱沟通,MOS电容存储栅中的信号电荷将通过转移栅转移到模拟移位寄存器CRI电极下的势阱中。
当SH由高变低时,SH低电平形成的浅势阱(也可以称为势垒)将存储栅下的势阱与CR1电极下的势阱隔离开。
存储栅下的势阱进入光积分状态,而模拟移位寄存器将在CR1与CR2脉冲的作用下驱使信号电荷进行定向转移。
最初由存储栅转移至CR1电极下势阱中的信号电荷将向左转移进入CR2电极下势阱中,而后再转移至CR1电极下势阱中,一位位地向左转移,最后经过输出电路由OS 端输出哑元信号和2160个有效像元信号,而由DOS端输出补偿信号(或参考信号)。
由于结构上的安排,OS端首先输出13个虚设单元信号;再输出51个暗信号,然后才连续输出Sl至S2160的有效像素单元信号。
第S2160信号输出后,又输出9个暗信号,再输出2个奇偶检测信号,之后便是没有信号的空驱动信号。
空驱动数目可以是任意的,但必须大于零,否则会影响下一行信号的输出。
图2.3 TCD1206SUP驱动脉冲波形图2.1.3 TCD1206SUP的特点1)驱动简单。
TCD1206SUP的四路驱动脉冲均可由CMOS逻辑器件HC7404提供0.3V 到5V的脉冲,这是因为在CCD芯片的内部已经设置了电平转换驱动器电路,极大地方便了用户。