自转旋翼机的基本构造和原理-1
- 格式:docx
- 大小:2.29 MB
- 文档页数:16
旋翼机原理研究一、研究背景旋翼机或称自旋翼机,是一种介于飞机和直升机之间的一种飞行器,依靠自由旋转的旋翼系统提供升力飞行的航空器,正常飞行时旋翼系统无动力驱动。
而是依靠向上流过桨叶的气流维持旋翼的自由旋转自旋,同时产生将飞行器维持在空中的升力,就像是一个横放的风车所以最初发明时也被称为风车飞机。
在飞行中,旋翼机同直升机最明显的分别为直升机的旋翼面向前倾斜,而旋翼机的旋翼则是向后倾斜的。
旋翼机飞行时,举力主要由旋翼产生,固定机翼仅提供部分举力。
有的旋翼机甚至没有固定机翼,全部举力旋翼机都靠旋翼产生。
自转旋翼机通常由发动机驱动的独立小旋翼的垂直螺旋桨产生推进力升空。
由于旋翼机的旋翼旋转的动力是由飞机前进而获得,依靠前方来流吹动始终处于自转状态。
万一发动机在空中停车螺旋桨不转了,可以直接依靠旋翼自转着陆,此时旋翼机据惯性继续维持前飞,并逐渐减低速度和高度,就在这高度下降的同时,也就有了自下而上的相对气流,旋翼就能可自转提供升力。
这样,旋冀机便可凭飞行员的操纵安全地滑翔降路。
即使在行员不能操纵,旋翼机失去控制的特殊情况下,也会像降落伞-样的降落,虽然也是粗暴着陆,但不会出现类似秤陀落地的情况。
当然,直升机也是具备自转下沿安全着陆能力的。
但它的旋冀需要从有动力状态过渡到自转状态,这个过渡要损失一定高度。
如果飞行高度不够,那么直升机就可能来不及过渡而触地。
旋翼机本身就是在自转状态下飞行的,不需要进行过渡,所以也就没行这种为安全转换所需的高度约束。
旋翼机由于其旋翼自转,没有自发动机至旋翼的减速和传动装置,也不需要平衡旋翼反扭矩的尾桨,因而结构大大简化。
现代自转旋翼飞行器采用旋翼预转技术,起飞前通过简单传动装置将旋翼预先驱转,然后通过离合器切断传动链路后起飞,使得它可以超短距起飞;自转旋翼飞行器降落时,通过操纵旋翼锥体后倾,可实现点式着陆,不需要专用机场。
二、研究内容一、概要结合自转旋翼特性及旋翼机设计的独特性,在直升机空气动力学和飞行动力学原理的基础上修改并建立了计算模型,解决了旋翼机气动布局、总体参数及旋翼设计等方面的问题。

自转旋翼机飞行培训课件自转旋翼机飞行培训课件自转旋翼机是一种具有独特飞行特性的飞行器,它通过旋转的主旋翼产生升力,并通过尾旋翼产生反扭力来保持平衡。
自转旋翼机的飞行控制和操纵相对复杂,需要飞行员经过专门的培训才能驾驶。
本文将介绍自转旋翼机飞行培训课件的内容,帮助读者更好地了解这一飞行器的飞行原理和操作技巧。
第一部分:自转旋翼机的基本概念和原理在自转旋翼机飞行培训课件的第一部分,将对自转旋翼机的基本概念和原理进行介绍。
首先,将介绍自转旋翼机的主要组成部分,包括主旋翼、尾旋翼、引擎和机身等。
然后,将详细解释主旋翼产生升力的原理,包括机翼效应、角动量守恒和迎角等概念。
同时,还会介绍尾旋翼产生反扭力的原理和作用。
第二部分:自转旋翼机的飞行控制系统在自转旋翼机飞行培训课件的第二部分,将介绍自转旋翼机的飞行控制系统。
首先,将介绍飞行员的操纵杆和脚蹬的作用,以及它们与飞行控制系统的联系。
然后,将详细介绍自转旋翼机的主控制面,包括主旋翼的可变旋翼桨叶和尾旋翼的可变尾旋翼桨叶。
同时,还会介绍自转旋翼机的稳定控制系统,包括自动稳定器和飞行控制计算机等。
第三部分:自转旋翼机的飞行特性和操作技巧在自转旋翼机飞行培训课件的第三部分,将介绍自转旋翼机的飞行特性和操作技巧。
首先,将介绍自转旋翼机的起飞和降落过程,包括垂直起降和短距离起降等。
然后,将详细介绍自转旋翼机的悬停和盘旋飞行技巧,包括悬停控制和盘旋半径的调整等。
同时,还会介绍自转旋翼机的巡航和高速飞行技巧,包括巡航速度和飞行姿态的调整等。
第四部分:自转旋翼机的飞行安全和应急处理在自转旋翼机飞行培训课件的第四部分,将介绍自转旋翼机的飞行安全和应急处理。
首先,将介绍自转旋翼机的飞行安全规定和标准,包括飞行员的资质要求和飞行器的检查要求等。
然后,将详细介绍自转旋翼机的应急处理技巧,包括发动机故障和系统故障的处理方法等。
同时,还会介绍自转旋翼机的紧急迫降和紧急撤离的程序和技巧。

旋翼机的历史20世代飞机起降时常因故障而失速,导致很多恶性事故。
西班牙工程师谢巴(也有其他音译,如“西尔瓦”等)于是发明了自转旋翼机,试图解决这一问题。
旋翼靠飞机运动时激起气流转动,产生升力,使飞机失速时不会下坠,当时,他的这个发明被新闻界称之为“风车飞机”。
1925年,谢巴在汉普郡芳白露皇家空军基地首次正式试飞。
1926年3月24日,谢巴在英国创办了自己的公司,其成功之作是有名的C.30型双座敞式座仓的轻型旋翼机,1934年底开始交付皇家空军所属的“陆军直接支援作战学校”使用,共计12架,取名为“旋翼Ⅰ”。
有一架C.30和另一架C.19还首次参加了在西班牙内战的实战考验。
1928年,谢巴亲自驾驶旋翼机用1小时时间成功横越英伦海峡。
此后,英美一些公司开始制造旋翼机,用于搜索和测量。
由于得不到政府支持,西谢巴的公司关闭于1940年。
后因美国直升机技术的飞速发展,才使英国人有所醒悟。
1943年底,谢巴才得以重操旧业。
1937年,令整个航空界震惊的是,Heinrich Focke驾驶着他设计的Fw61直升机升空,这立即刷新了世界直升机的所有飞行记录,飞行速度,飞行高度飞行距离和飞行时间。
得益于Focke及其设计伙伴Anton Flettner,德国成为二战期间旋翼飞机的领先者。
1942年,德国海军开始测试Fl 282,海军希望能用它来侦察敌军潜艇和护航。
在第一次世界大战期间,一些国家就开始尝试在潜艇上搭载飞机,但随着战争的结束,兴趣消退了。
二战的爆发,使得德国和日本对这个方案的兴趣大增。
德国海军最初看上了Arado Ar 231,但这种水上飞机并不适合潜艇搭载。
它需要从水面滑跑起飞,组合和分解需要太多时间,这使得潜艇暴露在水面的时间太长,于是海军中止了该项目。
2战期间,潜艇迫切需要远程空中侦察来提供情报,由于潜艇本身的局限性,使得了望员很难辨认9.6-12.8 km (6-8 miles)以外的船只。
自转旋翼机飞行原理
《自转旋翼机飞行原理》
嘿,你知道吗?自转旋翼机这玩意儿可太有意思啦!让我来给你讲讲它的飞行原理哈。
有一次啊,我去参观一个航空展览,就看到了一架自转旋翼机摆在那儿。
哇,那可真是吸引了我的眼球。
我就凑过去仔细观察,这一看,可让我对它的飞行原理有了深刻的了解呢。
你看哈,它上面那个大大的旋翼,就像是一个超级大的风扇叶子。
当自转旋翼机开始飞起来的时候呀,空气就会呼呼地从下面往上吹。
这就好比我们夏天吹风扇,风一吹,我们就感觉凉快。
而自转旋翼机呢,这个旋翼被风吹动,就开始转起来啦。
然后呢,随着旋翼的转动,它就产生了一种神奇的力量。
就好像我们骑自行车,轮子一转起来,我们就能往前走一样。
这个旋翼转起来,就能让飞机在空中保持平衡,并且往前飞啦。
而且哦,自转旋翼机还有一个特别好玩的地方,就是它的飞行感觉很特别。
不像普通的飞机那样一下子就冲出去了,它是慢悠悠地,就好像在空中散步一样。
我当时就在想啊,如果我能坐在上面,那肯定是一种超级特别的体验,能看到好多平时看不到的风景呢。
总之啊,自转旋翼机的飞行原理就是这么神奇又有趣。
它就像是一个在空中玩耍的大玩具,让人忍不住想去探索更多关于它的奥秘呢!哎呀,我现在都还在回味那次看到自转旋翼机的场景呢,真希望有一天能真正坐上去体验一把呀!。
旋翼机原理旋翼机是一种具有独特原理的飞行器。
它以旋转的主旋翼产生升力,控制飞行姿态和方向,同时通过尾旋翼产生反扭力来平衡主旋翼的扭矩,从而实现飞行。
旋翼机的原理涉及到空气动力学、力学、控制理论等多个学科,是一门综合性的技术学科。
一、旋翼机的构成和工作原理旋翼机主要由机身、主旋翼和尾旋翼三部分组成。
机身是旋翼机的主体,包括驾驶舱、发动机、传动系统和底盘等部分。
主旋翼是旋翼机的升力来源,由多片旋翼叶片组成,通过旋转产生向上的升力,同时也产生向后的推力。
尾旋翼是旋翼机的控制部分,通过产生反扭力来平衡主旋翼的扭矩,从而实现飞行方向的控制。
旋翼机的工作原理基于伯努利定律和牛顿第三定律。
当主旋翼旋转时,叶片上的气流速度增加,压力下降,产生向上的升力。
同时,由于牛顿第三定律,旋转的叶片也会产生向后的推力。
这样,旋翼机就可以在空中飞行。
尾旋翼的工作原理则是基于牛顿第三定律。
当旋翼机产生扭矩时,尾旋翼通过产生反扭力来平衡扭矩,从而保持稳定的飞行方向。
尾旋翼的位置和角度可以通过控制杆或电脑控制系统来调整,从而实现飞行方向的控制。
二、旋翼机的空气动力学原理旋翼机的飞行原理涉及到空气动力学原理。
空气动力学是研究物体在空气中运动时所受到的空气力学原理的学科。
旋翼机的升力和推力都是基于空气动力学原理产生的。
旋翼机的升力是由旋转的主旋翼产生的。
当主旋翼旋转时,叶片上的气流速度增加,压力下降,产生向上的升力。
这个原理可以用伯努利定律来解释。
伯努利定律指出,当气体通过一个管道或器具时,速度越快,压力就越低。
在旋翼机中,叶片上的气流速度越快,压力就越低,从而产生向上的升力。
旋翼机的推力也是由旋转的主旋翼产生的。
当主旋翼旋转时,叶片上的气流速度增加,产生向后的推力。
这个原理同样可以用伯努利定律来解释。
当叶片旋转时,气流速度增加,从而产生向后的推力。
尾旋翼的工作原理也是基于空气动力学原理。
尾旋翼通过产生反扭力来平衡主旋翼的扭矩,从而实现飞行方向的控制。
自动侧斜器主要部分为:(1)旋转环(又称动环)3——它通过变距拉杆(又称小拉杆)8分别于各片桨叶变距铰的摇臂连接,并通过扭力臂(又称拨杆)与旋翼桨相连,旋翼旋转时则与桨同步旋转。
另一面,它通过轴承4与不旋转环2相连接,从而产生相对转动。
它与不旋转环可一起升降或倾斜,从而将操纵位移通过变距拉杆8传递给桨叶变距饺,以改变各片桨叶的安装角(即桨距角)。
(2)不旋转环(又称不动环)2一它通过十字接头或球饺与内层的滑筒相连,两者能一起升降或产生相对倾斜滑筒上还装有纵向5及横向6的操纵摇臂支座,纵、横向操纵拉杆分别经此与不旋转环相连。
纵、横向操纵动作经此使不旋转环连同旋转环一起相对于滑筒向所需方向倾斜,从而周期性改变各片桨叶的安装角. (3)滑筒一套装在导筒座1上,两者能产生轴向相对滑动,同时滑筒还与总距操纵拉杆7相连.总距操纵动作经此使滑筒连同十字接头,不旋转环、旋转环一起升降,然后将操纵位移传递给每片桨叶的变距校。
当驾驶员进行总距操纵时(如图4.4匀,例如上提(下压)总距操纵轩2,操纵动作经滑筒、十字接头、不旋转环、旋转环及桨叶变距拉轩传至桨叶变距饺,使各片桨叶改变同样大小的安装角,从而达到增加(减小)旋翼拉力的目的。
当驾驶员移动驾驶轩1进行纵、横向操纵时,操纵动作分别由装在滑筒上的纵、横向操纵臂传至不旋转环上,便不旋转环连同旋转环一起向所需方向倾斜,从而使桨叶安装角发生周期性变化,造成旋翼空气动力的不对称,再使旋翼锥体(即旋翼拉力)向所需方向倾斜,以达到操纵直升机飞行的目的。
此外,当驾驶员进行航向操纵时,对于单旋翼带尾桨的直升机来说,脚蹬操纵动作通过尾桨操纵系统改变尾桨拉力大小,由此破坏了原来的航向平衡状态,达到改变航向的目的。
6.直升机的飞行性能与普通固定翼飞机一样,随着时代和技术的发展,人们对直升机飞行性能的要求也日益提高。
通常直升机有一些与普通固定翼飞机相似的飞行性能要求,例如: 最大平飞速度(Vmax)最大巡航速度(Vcmax)及经济巡航速度(Vce)使用升限(或动升限)(Hs)最大爬升速度(Vy max)航程(L)、活动半径,转场航程续航时间或续航力(T)除此之外,直升机有以下几项特有的飞行性能指标:垂直爬升速度(Vyv)悬停升限(或静升限)(Ht一其中又可分为无地效悬停升限和有效地,悬停升限。
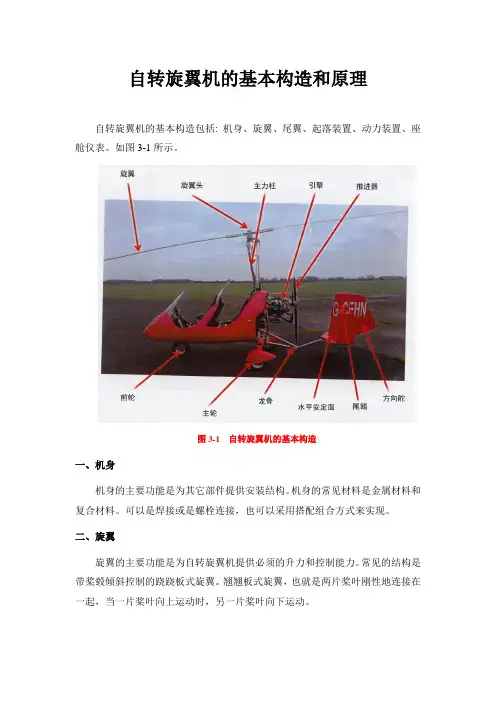
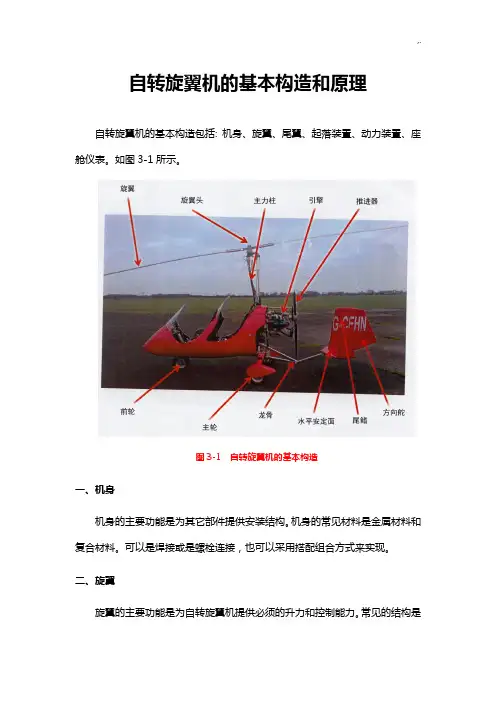
自转旋翼机的基本构造和原理自转旋翼机的基本构造包括: 机身、旋翼、尾翼、起落装置、动力装置、座舱仪表。
如图3-1所示。
图3-1 自转旋翼机的基本构造一、机身机身的主要功能是为其它部件提供安装结构。
机身的常见材料是金属材料和复合材料。
可以是焊接或是螺栓连接,也可以采用搭配组合方式来实现。
二、旋翼旋翼的主要功能是为自转旋翼机提供必须的升力和控制能力。
常见的结构是带桨毂倾斜控制的跷跷板式旋翼。
翘翘板式旋翼,也就是两片桨叶刚性地连接在一起,当一片桨叶向上运动时,另一片桨叶向下运动。
图3-2 跷跷板式结构的旋翼头三、尾翼尾翼由垂直尾翼和水平尾翼组成。
主要功能是为自转旋翼机提供稳定性及偏转控制。
四、起落装置起落装置的功用是提供航空器起飞、着陆和地面停放之用。
它可以吸收着陆冲击能量,减少冲击载荷,改善滑行性能。
自转旋翼机一般有三个起落架,其中两个主要起落架位于重心附近的机身两侧,起主要的支撑作用,另一个起落架在机头或机尾。
若在机尾,则称为后三点式,较适合在粗糙道面上行进;若在机头,则称为前三点式,为大多数自转旋翼机所采用,并且该前轮可通过方向舵脚蹬控制偏转,以便地面滑行时灵活转弯。
轮式起落架一般设有减震装置,能吸收大部分着陆能量,可以在硬性路面上进行滑行起飞和降落。
能在水上起降的自转旋翼机,采用浮桶式起落架。
五、动力装置为自转旋翼机提供动力,推动其前进的装置称为动力装置。
它由发动机、燃料系统以及导管、附件仪表等组成。
在地面,动力装置提供旋翼系统预旋的动力;飞行时,动力装置不为旋翼系统提供动力。
六、座舱仪表座舱仪表是提供给飞行员观察和判断飞行状态,以做出正确的操纵控制。
它们一般包括发动机仪表(如转速表、油压表等)、气动仪表(如空速表、升降速度表等)、电子仪表(如地平仪、导航仪)等。
不同的自转旋翼机根据结构复杂程度选装不同配置的仪表。
图3-6为常见的自转旋翼机座舱仪表。
图3-6 常见的自转旋翼机座舱仪表自转旋翼机的工作原理自转旋翼机是通过旋翼来产生升力的,因此,了解旋翼空气动力的产生和变化,是掌握自转旋翼机运动规律和操纵原理的基础。
旋翼机的工作原理嘿,朋友们!今天咱来聊聊旋翼机那神奇的工作原理呀!旋翼机,这玩意儿可有意思啦!你看,它就像是一只在空中自由翱翔的大鸟。
那旋翼啊,就如同大鸟的翅膀,扑扇扑扇地带着它飞起来。
想象一下,旋翼机的旋翼快速转动起来,就像是运动员在拼命奔跑,那股劲儿可足啦!空气在旋翼的搅动下,形成了一股神奇的力量,把旋翼机往上托举。
这感觉,就好像我们小时候玩的纸飞机,扔出去后,那股空气的力量让它能在空中飞一会儿。
旋翼机的发动机就像是它的心脏,源源不断地给它提供动力。
没有这个强大的心脏,旋翼可就转不起来喽,那还怎么飞呀!发动机“嗡嗡”地响着,仿佛在对我们说:“嘿,我准备好了,让我们一起冲向蓝天吧!”旋翼机飞行的时候,那场面可壮观啦!旋翼呼呼地转,带着它轻盈地在空中飞舞。
这时候的旋翼机,可不就像是一个在空中跳舞的精灵嘛,那么自由自在,那么欢快。
它的飞行姿态也特别有趣。
有时候会左右摇晃一下,就好像在和我们开玩笑似的。
但可别小瞧了这摇晃,这也是它保持平衡的一种方式呢。
而且啊,旋翼机和直升机还有些不一样呢。
旋翼机的旋翼不需要那么大的动力来维持它的旋转,这就好比骑自行车,一开始用力蹬,等速度起来了,就没那么费劲啦。
再说了,旋翼机的安全性也挺高的呢。
就算发动机出了点小毛病,它的旋翼也能依靠空气的力量继续旋转一会儿,给飞行员足够的时间来应对。
这就像是我们走路的时候不小心绊了一下,但我们还是能保持平衡,不至于马上摔倒。
总之,旋翼机就是这么一个神奇又有趣的东西。
它靠着旋翼的转动和发动机的强大动力,在天空中自由翱翔。
它的工作原理虽然不复杂,但却蕴含着无尽的奥秘和乐趣。
让我们一起为旋翼机点赞吧,期待它能带着我们去探索更多的天空奥秘!怎么样,是不是觉得旋翼机特别棒呀?是不是也想坐上去体验一把在空中飞翔的感觉呢?哈哈!原创不易,请尊重原创,谢谢!。
自转旋翼机的基本构造和原理自转旋翼机的基本构造包括: 机身、旋翼、尾翼、起落装置、动力装置、座舱仪表。
如图3-1所示。
图3-1 自转旋翼机的基本构造一、机身机身的主要功能是为其它部件提供安装结构。
机身的常见材料是金属材料和复合材料。
可以是焊接或是螺栓连接,也可以采用搭配组合方式来实现。
二、旋翼旋翼的主要功能是为自转旋翼机提供必须的升力和控制能力。
常见的结构是带桨毂倾斜控制的跷跷板式旋翼。
翘翘板式旋翼,也就是两片桨叶刚性地连接在一起,当一片桨叶向上运动时,另一片桨叶向下运动。
图3-2 跷跷板式结构的旋翼头三、尾翼尾翼由垂直尾翼和水平尾翼组成。
主要功能是为自转旋翼机提供稳定性及偏转控制。
四、起落装置起落装置的功用是提供航空器起飞、着陆和地面停放之用。
它可以吸收着陆冲击能量,减少冲击载荷,改善滑行性能。
自转旋翼机一般有三个起落架,其中两个主要起落架位于重心附近的机身两侧,起主要的支撑作用,另一个起落架在机头或机尾。
若在机尾,则称为后三点式,较适合在粗糙道面上行进;若在机头,则称为前三点式,为大多数自转旋翼机所采用,并且该前轮可通过方向舵脚蹬控制偏转,以便地面滑行时灵活转弯。
轮式起落架一般设有减震装置,能吸收大部分着陆能量,可以在硬性路面上进行滑行起飞和降落。
能在水上起降的自转旋翼机,采用浮桶式起落架。
五、动力装置为自转旋翼机提供动力,推动其前进的装置称为动力装置。
它由发动机、燃料系统以及导管、附件仪表等组成。
在地面,动力装置提供旋翼系统预旋的动力;飞行时,动力装置不为旋翼系统提供动力。
六、座舱仪表座舱仪表是提供给飞行员观察和判断飞行状态,以做出正确的操纵控制。
它们一般包括发动机仪表(如转速表、油压表等)、气动仪表(如空速表、升降速度表等)、电子仪表(如地平仪、导航仪)等。
不同的自转旋翼机根据结构复杂程度选装不同配置的仪表。
图3-6为常见的自转旋翼机座舱仪表。
图3-6 常见的自转旋翼机座舱仪表自转旋翼机的工作原理自转旋翼机是通过旋翼来产生升力的,因此,了解旋翼空气动力的产生和变化,是掌握自转旋翼机运动规律和操纵原理的基础。
运动类飞行器----自转旋翼机最近局方修改的部分法规,很多朋友都已经注意到了对于运动类飞行器给予了足够的重视,通航只有让更多的人参与进来,才会驶入发展的快车道。
运动类飞行器则是最容易普及的一类。
一、先说一下什么是自转旋翼机旋翼机,一种利用前飞时的相对气流吹动旋翼自转以产生升力的旋翼航空器。
它的前进力由发动机带动螺旋桨直接提供。
旋翼机须滑跑加速才能起飞。
旋翼机实际上是一种介于直升机和固定翼飞机之间的飞行器,它除去旋翼外,还带有一副垂直放置的螺旋桨以提供前进的动力,一般也装有较小的机翼在飞行中提供部分升力。
二、很多人看到这类飞行器的第一感觉就是这东西和直升机有啥区别?上天能安全吗?(本文只介绍自转旋翼机的优点,当然也有很多局限性,由于篇幅所限,先不做过多介绍)自转旋翼机与直升机相同的地方:都由旋翼产生升力---旋翼旋转过程中,叶片与气流产生相对运动,从而产生升力。
好像再也没啥相同点了,欢迎各位补充吧,接着往下写。
自转旋翼机与直升机的不同之处:旋翼的驱动力来源不同。
直升机是发动机直接驱动旋翼旋转,而自转旋翼则是靠相对气流推动旋翼旋转(预旋阶段除外)。
为了实现气流推动旋翼旋转,很多地方恰恰和直升机相反:例如直升机在正常飞行状态气流从桨盘上方向下方流动,而旋翼机是从下方向上方流动。
这里只是说主要方向,规范的说是直升机旋翼升力与气流方向相反,旋翼机升力与气流方向相同。
没找到合适图片,由于这是一个核心问题,自己手绘一张,大家见谅。
为了保持飞行器平飞时的姿态,直升机旋翼轴前倾,旋翼机旋翼轴后倾。
操纵方式也不相同:直升机直接控制旋翼和尾桨实现所有操纵。
而旋翼机的旋翼则只是起到辅助控制的作用,更多的操作时通过油门和方向舵完成。
旋翼转速:直升机在正常飞行阶段,旋翼转速基本保持很恒定,而旋翼机转速变化范围较大。
下图是MTOsport旋翼机旋翼转速情况。
正常范围从200-550转/分。
下面再回答第二个问题,关于旋翼机的安全性,很多不了解旋翼机的朋友或许都会有所顾虑。
旋翼机构造飞行原理旋翼机是一种较为特殊的飞行器,它通过旋转的主旋翼产生升力,从而实现飞行。
它具有垂直起降和悬停飞行的能力,因此在各种需要这些特性的应用领域中得到了广泛的应用,比如直升机、多旋翼飞行器等。
旋翼机构造方面,旋翼机由主旋翼、副旋翼、尾旋翼、机身和起落架等组成。
主旋翼是最重要的部分,它是通过旋转产生升力,使飞机起飞和保持悬停的。
主旋翼可以分为刚性旋翼和叶型翼片旋翼两种。
刚性旋翼由一根刚性的轴连接到飞机上,旋转产生升力。
叶型翼片旋翼则由多个叶片组成,每个叶片都可以单独的进行俯仰运动,从而调整升力的大小和方向。
副旋翼是一种辅助的旋翼,通常位于飞机的尾部。
它的主要作用是提供稳定性和平衡,以及产生辅助升力。
副旋翼通过旋转产生一个向相反方向的力,以抵消由主旋翼引起的飞机的反作用力。
在悬停飞行时,副旋翼还可以提供一些额外的升力。
尾旋翼是一种用于控制飞机方向的设备,它通常位于飞机的后部。
尾旋翼通过旋转产生一个向一侧的力,实现飞机的转向。
在飞行过程中,通过改变尾旋翼的旋转速度和方向,可以控制飞机的转向运动。
旋翼机的飞行原理主要是通过主旋翼产生的升力和推力来实现。
主旋翼的旋转产生了一个向上的升力,使飞机向上升起。
同时,由于旋转的惯性力和飞机的反作用力的作用,旋翼机会出现一种俯仰运动。
为了保持稳定性,在旋翼机的尾部通常还会安装有一个水平安定面,通过改变它的位置和角度,可以调整飞机的俯仰运动。
旋翼机的操纵主要通过改变旋翼的旋转速度和方向来实现。
通过改变主旋翼的旋转速度,可以控制飞机的上升和下降。
通过改变副旋翼的旋转速度,可以控制飞机的稳定性和平衡。
通过改变尾旋翼的旋转速度和方向,可以控制飞机的转向运动。
总之,旋翼机通过主旋翼的旋转产生升力和推力,实现飞机的垂直起降和悬停飞行。
它的操纵通过改变旋翼的旋转速度和方向来实现各种飞行动作。
旋翼机的构造和飞行原理相对复杂,但它的独特特性使得它在军事、民用等领域中得到了广泛的应用和发展。
旋翼机原理
旋翼机是一种以旋转的机翼(旋翼)产生升力和推力的飞行器。
它主要由机身、旋翼和尾翼组成。
旋翼机的工作原理是通过旋转的机翼产生升力。
旋翼由数个叶片组成,通过旋转产生空气动力学效应,即升力和推力。
当旋翼高速旋转时,叶片上方的气压变低,下方的气压增加,从而形成升力。
同时,旋转的旋翼也会产生一个向下的推力,将旋翼机推离地面。
旋翼机的控制主要通过调整旋翼的转速和叶片角度来实现。
调整旋翼转速可以改变机身受到的升力和推力,从而控制旋翼机的上升、下降、前进和后退。
通过改变叶片的角度,可以调整旋翼产生的升力和推力的方向,实现旋转、横向移动和倾斜等动作。
为了稳定旋翼机的飞行,通常还会配备尾翼。
尾翼可以通过改变它的角度来产生控制力,从而控制旋翼机的方向。
通过调整尾翼的角度配合旋翼控制,可以实现旋翼机的平稳飞行和精确操作。
总的来说,旋翼机通过旋转的机翼产生升力和推力,通过调整旋翼转速和叶片角度以及配备尾翼来实现飞行控制。
它具有垂直起降、悬停、低速飞行和垂直降落等优势,广泛应用于民航、军事和救援等领域。
中国人都买的起的小飞机,详解旋翼机的飞行原理你为什么想飞旋翼机?首先,如果你在气流不稳定的情况下飞旋翼机,你会感受到比其它飞机少得多的颠簸和震动。
这是由于气流流过旋翼而使旋翼高速旋转和旋翼高强度的承受风力载荷的能力。
旋翼机能承受高达20mph 的侧风,这样当其它飞机因侧风过大而停在地面时,旋翼机却可以翱翔蓝天,这意味着旋翼机比其他的飞机有更多的可飞行天气。
其二,旋翼机不会失速,可以比许多其他类型的飞机飞的更安全。
旋翼机活动的高度范围是300米。
当然,它可以飞得更高,但有那个必要吗?在这个高度层,你下面的世界已是一览无遗,而且若一旦发动机停车你还可以将它迫降在一小块田野里,因为它着陆后的滑跑距离还不到 5米。
旋翼机设有两个座位,并可连续飞行4 小时,旋翼机的确是一个长途旅行的好伙伴。
乘坐旋翼机飞行乐趣无穷。
它不仅具有直升机那种超凡的魅力和惊险刺激的感觉,同时价格也极低。
与其花费每小时3万元飞直升机,你还不如自己买一架旋翼机并自己驾驶来享受飞行的乐趣。
将油料、服务费和每年的折旧费合起来每小时的成本也就是1500元人民币。
即便旋翼机没有封闭座舱。
但我认识的每个拥有旋翼机飞着玩的人都有一个最大的收获—灿烂的微笑,我称其为“旋翼机的开心之笑”。
什么是旋翼机?旋翼机看上去像一种小型的直升机,它的一对旋翼同直升机相同但也仅此而已。
旋翼机和直升机的区别?直升机有一台连接到旋翼上的引擎,在飞行中引擎带动旋翼高速旋转以产生动力。
旋翼机也有旋翼,我们称其为“空转旋翼”或“自动旋翼”,在飞行中这对旋翼不和引擎相联。
更细微的差别在于在正常飞行中,直升机旋翼向前倾斜,将旋翼上方的空气向下压。
你也许看过电影:一架直升机从地面垂直升起3米后悬停,接着压低机头向前加速飞行,最后爬升远去。
而旋翼机却不同,飞行中,它的旋翼向后倾斜,空气从旋翼的下方流向旋翼的上方,这种气流带动旋翼旋转。
假若直升机空中停车,直升机上的特殊离合器会使旋翼继续旋转。
旋翼机构造、飞行原理部分(霍洪磊)1.旋翼产生拉力的原理:A.旋翼旋转不断排压空气,使空气产生的给旋翼的一个大小相等方向相反的反作用力就是旋翼的拉力。
B.旋翼旋转和空气相互作用共同产生的力就是旋翼拉力。
C.空气的流动产生的对旋翼的一个力就是旋翼拉力。
2.旋翼拉力、空气密度和飞行速度分别对平均诱导速度的影响关系:A.旋翼拉力、空气密度和飞行速度越大,产生的诱导速度越大。
B.旋翼拉力、空气密度和飞行速度越小,产生的诱导速度越大。
C.旋翼拉力、空气密度越大和飞行速度越小,产生的诱导速度越大。
3.旋翼转速对拉力的影响:A.旋翼的拉力与旋翼转速的平方成正比。
B.旋翼的拉力与旋翼转速的两倍成正比。
C.旋翼的拉力与旋翼转速的四次方成正比。
4.桨叶迎角对拉力的影响:A.随着桨叶迎角的增大,旋翼拉力先增大后减小。
B.随着桨叶迎角的增大,旋翼拉力一直增大。
C.随着桨叶迎角的增大,旋翼拉力一直减小。
5.影响直升机俯仰力矩的主要因素有哪些:A.桨矩的提放、飞行速度的改变和重心位置的变化。
B.拉力的改变、飞行速度的改变和空气密度的变化。
C.拉力的改变、飞行速度的改变和重心位置的变化。
6.直升机安定性的定义:A.飞行中受到微小干扰后偏离原来平衡状态,在干扰消失后,不经飞行员操纵,就能自动回复到原来的平衡状态的特性。
B.飞行中受到微小干扰后偏离原来平衡状态,在干扰消失后,经飞行员操纵,能回复到原来的平衡状态的特性。
C.飞行中受到微小干扰后偏离原来平衡状态,经飞行员操纵,能回复到原来的平衡状态的特性。
7.直升机操纵反应时间主要取决下列哪些因素:A.直升机绕重心旋转的转动惯量、直升机角速度阻尼和驾驶杆力。
B.直升机绕重心旋转的转动惯量、操纵者的反应和驾驶杆力。
C.操纵者的反应、直升机角速度阻尼和驾驶杆力。
8.影响直升机平飞行性能的因素:A.平飞的高度、飞行的重量和大气温度。
B.平飞的速度、飞行的重量和大气温度。
C.平飞的速度、飞行的重量和平飞的高度。
自转旋翼机的基本构造和原理自转旋翼机的基本构造包括: 机身、旋翼、尾翼、起落装置、动力装置、座舱仪表。
如图3-1所示。
图3-1 自转旋翼机的基本构造一、机身机身的主要功能是为其它部件提供安装结构。
机身的常见材料是金属材料和复合材料。
可以是焊接或是螺栓连接,也可以采用搭配组合方式来实现。
二、旋翼旋翼的主要功能是为自转旋翼机提供必须的升力和控制能力。
常见的结构是带桨毂倾斜控制的跷跷板式旋翼。
翘翘板式旋翼,也就是两片桨叶刚性地连接在一起,当一片桨叶向上运动时,另一片桨叶向下运动。
图3-2 跷跷板式结构的旋翼头三、尾翼尾翼由垂直尾翼和水平尾翼组成。
主要功能是为自转旋翼机提供稳定性及偏转控制。
四、起落装置起落装置的功用是提供航空器起飞、着陆和地面停放之用。
它可以吸收着陆冲击能量,减少冲击载荷,改善滑行性能。
自转旋翼机一般有三个起落架,其中两个主要起落架位于重心附近的机身两侧,起主要的支撑作用,另一个起落架在机头或机尾。
若在机尾,则称为后三点式,较适合在粗糙道面上行进;若在机头,则称为前三点式,为大多数自转旋翼机所采用,并且该前轮可通过方向舵脚蹬控制偏转,以便地面滑行时灵活转弯。
轮式起落架一般设有减震装置,能吸收大部分着陆能量,可以在硬性路面上进行滑行起飞和降落。
能在水上起降的自转旋翼机,采用浮桶式起落架。
五、动力装置为自转旋翼机提供动力,推动其前进的装置称为动力装置。
它由发动机、燃料系统以及导管、附件仪表等组成。
在地面,动力装置提供旋翼系统预旋的动力;飞行时,动力装置不为旋翼系统提供动力。
六、座舱仪表座舱仪表是提供给飞行员观察和判断飞行状态,以做出正确的操纵控制。
它们一般包括发动机仪表(如转速表、油压表等)、气动仪表(如空速表、升降速度表等)、电子仪表(如地平仪、导航仪)等。
不同的自转旋翼机根据结构复杂程度选装不同配置的仪表。
图3-6为常见的自转旋翼机座舱仪表。
图3-6 常见的自转旋翼机座舱仪表自转旋翼机的工作原理自转旋翼机是通过旋翼来产生升力的,因此,了解旋翼空气动力的产生和变化,是掌握自转旋翼机运动规律和操纵原理的基础。
自转旋翼机的基本构造和原理自转旋翼机的基本构造包括: 机身、旋翼、尾翼、起落装置、动力装置、座舱仪表。
如图3-1所示。
图3-1 自转旋翼机的基本构造一、机身机身的主要功能是为其它部件提供安装结构。
机身的常见材料是金属材料和复合材料。
可以是焊接或是螺栓连接,也可以采用搭配组合方式来实现。
二、旋翼旋翼的主要功能是为自转旋翼机提供必须的升力和控制能力。
常见的结构是带桨毂倾斜控制的跷跷板式旋翼。
翘翘板式旋翼,也就是两片桨叶刚性地连接在一起,当一片桨叶向上运动时,另一片桨叶向下运动。
图3-2 跷跷板式结构的旋翼头三、尾翼尾翼由垂直尾翼和水平尾翼组成。
主要功能是为自转旋翼机提供稳定性及偏转控制。
四、起落装置起落装置的功用是提供航空器起飞、着陆和地面停放之用。
它可以吸收着陆冲击能量,减少冲击载荷,改善滑行性能。
自转旋翼机一般有三个起落架,其中两个主要起落架位于重心附近的机身两侧,起主要的支撑作用,另一个起落架在机头或机尾。
若在机尾,则称为后三点式,较适合在粗糙道面上行进;若在机头,则称为前三点式,为大多数自转旋翼机所采用,并且该前轮可通过方向舵脚蹬控制偏转,以便地面滑行时灵活转弯。
轮式起落架一般设有减震装置,能吸收大部分着陆能量,可以在硬性路面上进行滑行起飞和降落。
能在水上起降的自转旋翼机,采用浮桶式起落架。
五、动力装置为自转旋翼机提供动力,推动其前进的装置称为动力装置。
它由发动机、燃料系统以及导管、附件仪表等组成。
在地面,动力装置提供旋翼系统预旋的动力;飞行时,动力装置不为旋翼系统提供动力。
六、座舱仪表座舱仪表是提供给飞行员观察和判断飞行状态,以做出正确的操纵控制。
它们一般包括发动机仪表(如转速表、油压表等)、气动仪表(如空速表、升降速度表等)、电子仪表(如地平仪、导航仪)等。
不同的自转旋翼机根据结构复杂程度选装不同配置的仪表。
图3-6为常见的自转旋翼机座舱仪表。
图3-6 常见的自转旋翼机座舱仪表自转旋翼机的工作原理自转旋翼机是通过旋翼来产生升力的,因此,了解旋翼空气动力的产生和变化,是掌握自转旋翼机运动规律和操纵原理的基础。
本章介绍旋翼、桨叶的工作参数,分析旋翼升力、阻力的产生和影响因素,以及桨叶运动的空气动力。
第一节旋翼和桨叶一、旋翼(一)旋翼直径和桨盘载荷旋翼直径:旋翼旋转时,桨尖所划圆圈的直径,叫做旋翼直径,用D表示。
如图4-1所示。
图4-1 旋翼直径桨盘面积:桨叶旋转所划圆的面积,叫桨盘面积,用F表示。
桨盘载荷:自转旋翼机的飞行重量与桨盘面积的比值,叫做桨盘载荷。
即P=G F式中:P-桨盘载荷(千克/米2)G-旋翼机的飞行重量(千克)F-旋翼的桨盘面积(米2)(二)旋翼实度(或称充填系数)所有桨叶面积之和同桨盘面积的比值,叫做旋翼实度,用σ表示。
KFσ=叶F式中K-片数F-一片桨叶的面积(米2)(三)旋翼转速和桨毂旋转平面旋翼转速:旋翼每分钟旋转的圈数,叫旋翼转速,用n表示。
旋翼转动的快慢又可用角速度(Ω)表示。
角速度以每秒钟转过的弧度为单位(弧度/秒)。
两者的关系为:Ω=2π(n/60)=πn/30(弧度/秒)圆周速度(Ωr):桨叶某一切面在旋转中的切向速度。
其数值等于旋翼的旋转角速度和该切面至旋转中心的距离的乘积,即Ωr。
桨毂旋转平面:桨毂旋转时与桨毂轴垂直的旋转平面,叫桨毂旋转平面。
在研究问题时,它是桨叶和旋翼很重要的基准面。
(四)旋翼的有效工作面积旋翼工作时,整个桨盘面积并不都有效地产生拉力。
桨叶尖端由于存在桨尖涡流,桨盘上下压力差减小,产生的拉力很小。
桨毂不产生拉力,因此,在计算有效面积时应减去旋翼桨盘面积的中心和边缘部分。
有效面积约为桨盘面积的92%-96%。
(五)旋翼迎角旋翼迎角:相对气流与桨毂旋转平面之间的夹角,叫旋翼迎角。
二、桨叶(一)桨叶的平面形状桨叶通常有矩形、梯形、混合梯形和桨尖具有后掠形,目前旋翼机普遍采用矩形桨叶。
如图4-2所示。
图4-2 桨叶的平面形状(二)桨叶的切面形状桨叶通常为平凸型、双凸型和对称型,如4.3图所示。
自转旋翼机通常采用S翼型,如8H-12翼型。
图4-3 桨叶的切面型状(三)桨叶的工作参数1. 桨叶切面安装角桨叶的弦线与桨毂旋转平面之间的夹角,叫桨叶安装角,用φ表示。
如图4-4所示。
相对于桨毂旋转平面,桨叶前缘高于后缘,φ为正。
桨距:桨叶半径等于0.7R 处的切面(该切面称特性切面)的安装角。
总距:各片桨叶的桨距的平均值叫旋翼的总距,用φ7表示。
图4-4 桨叶安装角2. 桨叶切面迎角桨叶旋转时,桨叶切面的相对气流合速度(W)与其翼弦之间的夹角,用α表示。
相对气流从弦线下方吹来,迎角为正。
通常特性切面的迎角,叫桨叶迎角,用α7表示。
桨叶迎角和旋翼迎角是不同的。
3. 桨叶切面来流角桨叶的相对气流合速度W与桨毂旋转平面的夹角。
用ε表示。
相对气流合速度与桨毂旋转平面一般是不平行的。
W从上方吹向桨毂旋转平面,ε为正;反之,从下方吹向桨毂旋转平面,ε为负。
如图4-5所示。
图4-5 桨叶安装角、迎角、来流角三者的关系从图4-5中不难看出,安装角、桨叶迎角、来流角三者之间的关系为:α=φ-ε第二节旋翼的自旋一、自旋直升机和自转旋翼机之间的一个根本不同:在于依靠动力维持飞行的过程中,直升机通过发动机的动力旋转翼面,从上方吸收气流;自转旋翼机旋翼系统工作在自旋状态下。
这意味着旋翼依靠向上流过翼面的气流维持自身的自由旋转。
在自旋过程中产生的力一方面维持旋翼的旋转,另一方面产生将飞行器维持在空中的升力。
从空气动力学的角度而言,在正常飞行时自转旋翼机旋翼系统的运转和直升机的旋翼系统在发动机失效时,向前自旋下降时的运转方式一样。
如图4-6所示。
图4-6在自转旋翼机上气流通过旋翼系统的方向和动力飞行状态下的直升机相反二、垂直自旋当旋翼机垂直下降时,桨叶也可以产生自旋,这称为垂直自旋。
由于旋翼机做垂直下降,这相当于有一个垂直气流吹向桨叶,另外,由于桨叶在自旋,这相当于有一个与桨叶转动盘面平行的气流吹向桨叶。
也就是说,有两股气流吹向桨叶(见图4-7,图中所示为桨叶的某一剖面)。
其中,吹向桨叶的垂直气流的速度通常是不变的,等于下降速度,而平行桨盘吹向桨叶某一剖面的气流速度实际上是该桨叶剖面转动的线速度,其大小正比于该桨叶剖面到转轴的半径,也就是说,在桨盘外侧桨尖处,平行桨盘吹向桨叶的气流速度大,在桨盘内侧桨毂处,平行桨盘吹向桨叶的气流速度小(见图4-8)。
旋翼上某一桨叶剖面升力的定义跟固定桨叶上升力的定义是相同的,升力方向都是垂直于相对气流的方向。
注意,桨叶剖面的升力与旋翼升力的概念是不同的,旋翼上垂直于飞行方向的力称为旋翼升力,由图图4-8可见。
图4-7 某一桨叶剖面所处的相对气流与合成的相对气流图4-8 桨尖和桨毂处的相对气流三、桨盘分区无论选用何种翼型,平行桨盘吹向桨叶的气流速度从桨毂到桨尖逐渐增大,而向上气流速度不变,因此,从桨尖到桨毂迎角逐渐增大(在桨叶没有扭转的条件下)。
这样,在桨毂附近,由于迎角大,可能超过失速迎角,桨毂附近就称为失速区(见图4-9)。
在桨尖附近,由于迎角小,升力几乎都在垂直方向,略向前(即桨叶运动方向)倾斜,加上阻力后,合力就略向后倾斜,这意味着合力阻碍桨叶转动,这里就称为被动区,由于此处的升力、阻力特性就像直升机螺旋桨一样,因此,也称为螺旋桨区,另外,由于桨尖附近相对气流速度高,升力大,平衡自转旋翼机重量的旋翼升力大部分都是在此区产生的。
在桨叶中段,迎角逐渐增大,升力向前(即桨叶运动方向)倾斜的角度也增大,加上阻力后,合力向前倾斜,这意味着合力驱使桨叶转动,这里就称为驱动区,因为桨叶不需要发动机动力驱动而自行转动。
图4-9 被动区/驱动区/失速区图4-10 桨叶不同部位产生的力旋翼桨尖部位的受力主要是垂直向上的(参见图4-10),正是这部分垂直向上的力(即旋翼升力)使自转旋翼机飞在空中,而在旋翼的中间部位,旋翼主要受到推力而向前转动。
四、前飞行时旋翼的自旋前面,我们讲述了自转旋翼机垂直下降时,旋翼的相对气流、迎角以及桨盘的分区。
自转旋翼机通常的飞行状态是前飞,此时旋翼的相对气流速度就要考虑前飞速度。
前行桨叶的相对气流速度是转动速度加上前飞速度,升力增大;后行桨叶的相对气流速度是转动速度减去前飞速度,升力减小。
前行和后行桨叶的相对气流速度不同,导致桨盘左右两侧的升力不对称,为了避免升力不对称,可以让前行桨叶向上挥舞以减小迎角和升力,同时另一侧的后行桨叶向下挥舞以增大迎角和升力。
实现桨叶上下挥舞的机构如图4-11所示,旋翼围绕挥舞铰做跷跷板式的上下挥舞。
图4-11 桨叶上下挥舞的机构具体来说,前行桨叶产生的升力大于后行桨叶产生的升力,那么前行桨叶向上挥舞,同时,后行桨叶将向下挥舞。
由于桨叶的向上挥舞或向下挥舞,导致流向桨叶的相对气流的方向发生变化,即迎角发生变化。
桨叶的向上挥舞导致迎角减小,桨叶的向下挥舞导致迎角增大。
桨叶前行时迎角减小,这就增大了被动区,桨叶后行时迎角增大,这就增大了失速区,这样使桨盘的分区向后行桨叶一侧偏移(参见图4-12)。
图4-12 后行桨叶失速后行桨叶失速前飞时自转旋翼机后行桨叶失速发生在从桨毂向外20%到40%左右区域(见图4-12),而直升机后行桨叶失速发生在桨尖。
由于自转旋翼机后行桨叶失速是固有的,失速区在后行桨叶内侧,随着前飞速度增大,后行桨叶的迎角需要增大以避免左右两侧力不对称,这样,失速区会向后行桨叶的外侧移动,因为失速区是由内侧向外侧发展,并不像直升机失速一开始就出现在桨尖(在桨叶没有扭转的条件下,直升机从桨毂到桨尖迎角逐渐增大,刚好与自转旋翼机相反),所以,相对自转旋翼机的重心,力矩变化较小,驾驶员可能感到抖动有一点增加,但不会感觉会有较大俯仰或滚转的趋势。
第三节旋翼的平衡一、旋翼的锥体和拉力的方向旋翼拉力的方向与旋翼转动时所处的位置有关。
旋翼不旋转时,桨叶受本身重力的作用而下垂。
旋翼旋转时,每片桨叶上的作用力除重力外,还有空气动力和惯性离心力。
图4-13 旋翼上挥形成锥体如图4-13所示,当旋翼高速旋转时,桨叶拉力(T叶)对桨毂形成使桨叶上挥的力矩。
重力(G叶)对桨毂形成的力矩使桨叶下垂。
惯性离心力(F惯)将桨叶向外拉。
三个外力迫使旋翼产生弹性变形形成向上挥舞的锥体,从而使旋翼处于平衡状态。
旋翼的桨叶不论转到哪个方位,都是向上倾斜的,所以拉力向内倾斜。
旋翼产生的拉力始终与桨盘法线方向一致。
当旋翼受到气流扰动或由于机动飞行使两片桨叶的气流速度不一致时,旋翼会自发地产生挥舞运动来平衡两桨叶的不均匀拉力。
二、旋翼的挥舞运动旋翼的挥舞运动,即旋翼叶片在绕旋翼转轴旋转的同时周期性地上下运动。
这是旋翼用来抵消由于速度差产生的升力不均匀的主要途径。
图4-14 旋翼挥舞时迎角的变化在桨盘的一边,叶片向前运动(与飞行方向一致),称前行桨叶;而另一边叶片向后运动(称后行桨叶)。