ABB工业机器人编程-第九章复习进程
- 格式:ppt
- 大小:6.79 MB
- 文档页数:26
ABB[a]-J-6ABB 机器人的程序编程6.1 任务目标掌握常用的PAPID 程序指令。
掌握基本RAPID程序编写、调试、自动运行和保存模块。
6.2 任务描述◆建立程序模块test12.24,模块test12.24 下建立例行程序main 和Routine1,在main 程序下进行运动指令的基本操作练习。
◆掌握常用的RAPID 指令的使用方法。
◆建立一个可运行的基本RAPID程序,内容包括程序编写、调试、自动运行和保存模块。
6.3 知识储备6.3.1 程序模块与例行程序RAPID 程序中包含了一连串控制机器人的指令,执行这些指令可以实现对机器人的控制操作。
应用程序是使用称为RAPID 编程语言的特定词汇和语法编写而成的。
RAPID 是一种英文编程语言,所包含的指令可以移动机器人、设置输出、读取输入,还能实现决策、重复其他指令、构造程序、与系统操作员交流等功能。
RAPID 程序的基本架构如图所示:RAPID 程序的架构说明:1)RAPID 程序是由程序模块与系统模块组成。
一般地,只通过新建程序模块来构建机器人的程序,而系统模块多用于系统方面的控制。
2)可以根据不同的用途创建多个程序模块,如专门用于主控制的程序模块,用于位置计算的程序模块,用于存放数据的程序模块,这样便于归类管理不同用途的例行程序与数据。
3)每一个程序模块包含了程序数据、例行程序、中断程序和功能四种对象,但不一定在一个模块中都1 / 40有这四种对象,程序模块之间的数据、例行程序、中断程序和功能是可以互相调用的。
4)在RAPID 程序中,只有一个主程序main,并且存在于任意一个程序模块中,并且是作为整个RAPID 程序执行的起点。
操作步骤:6.3.2 在示教器上进行指令编程的基本操作ABB 机器人的RAPID 编程提供了丰富的指令来完成各种简单与复杂的应用。
下面就从最常用的指令开始2 / 40学习RAPID 编程,领略RAPID 丰富的指令集提供的编程便利性。
ABB[a]-J-6ABB 机器人的程序编程6.1 任务目标掌握常用的PAPID 程序指令。
掌握基本RAPID程序编写、调试、自动运行和保存模块。
6.2 任务描述◆建立程序模块test12.24,模块test12.24 下建立例行程序main 和Routine1,在main 程序下进行运动指令的基本操作练习。
◆掌握常用的RAPID 指令的使用方法。
◆建立一个可运行的基本RAPID程序,内容包括程序编写、调试、自动运行和保存模块。
6.3 知识储备6.3.1 程序模块与例行程序RAPID 程序中包含了一连串控制机器人的指令,执行这些指令可以实现对机器人的控制操作。
应用程序是使用称为RAPID 编程语言的特定词汇和语法编写而成的。
RAPID 是一种英文编程语言,所包含的指令可以移动机器人、设置输出、读取输入,还能实现决策、重复其他指令、构造程序、与系统操作员交流等功能。
RAPID 程序的基本架构如图所示:RAPID 程序的架构说明:1)RAPID 程序是由程序模块与系统模块组成。
一般地,只通过新建程序模块来构建机器人的程序,而系统模块多用于系统方面的控制。
2)可以根据不同的用途创建多个程序模块,如专门用于主控制的程序模块,用于位置计算的程序模块,用于存放数据的程序模块,这样便于归类管理不同用途的例行程序与数据。
3)每一个程序模块包含了程序数据、例行程序、中断程序和功能四种对象,但不一定在一个模块中都有这四种对象,程序模块之间的数据、例行程序、中断程序和功能是可以互相调用的。
4)在RAPID 程序中,只有一个主程序main,并且存在于任意一个程序模块中,并且是作为整个RAPID 程序执行的起点。
操作步骤:6.3.2 在示教器上进行指令编程的基本操作ABB 机器人的RAPID 编程提供了丰富的指令来完成各种简单与复杂的应用。
下面就从最常用的指令开始学习RAPID 编程,领略RAPID 丰富的指令集提供的编程便利性。
ABB工业机器人编程基础操作1.编程语言ABB工业机器人的编程语言是RAPID(Robot Application Programming Interface and Development)语言。
RAPID是一种高级编程语言,类似于C++和Pascal,但有其特定的结构和语法。
2.程序结构3.变量和数据类型在ABB工业机器人的编程中,可以定义不同类型的变量来存储和处理数据。
常见的数据类型包括整型、浮点型、布尔型和字符串型。
变量可以被赋值和修改,用于存储机器人的状态和操作结果。
4.基本运算和控制流程ABB工业机器人的编程中,可以使用基本运算符(如加、减、乘、除)进行数值计算,还可以使用条件语句、循环语句和跳转语句进行控制流程的操作。
条件语句可以根据条件的真假来选择性地执行不同的代码块,循环语句可以重复执行指定次数的代码块,跳转语句可以改变程序的执行顺序。
5.函数和子程序ABB工业机器人的编程中,可以使用函数和子程序来组织和复用代码。
函数是一段完成特定任务的代码块,可以接受参数并返回结果。
子程序是一段逻辑上独立的代码块,可以在程序的任何地方调用执行。
函数和子程序的使用可以提高代码的可读性和灵活性。
6.机器人运动控制ABB工业机器人的编程中,可以使用运动指令来控制机器人的运动。
常见的运动指令包括位置运动、力矩运动和速度运动等。
位置运动指令可以将机器人的关节或工具从一个位置移动到另一个位置,力矩运动指令可以给机器人的关节或工具施加特定的力矩,速度运动指令可以控制机器人的运动速度。
7.I/O和通信ABB工业机器人的编程中,可以使用输入/输出(I/O)指令来进行机器人和外部设备的数据交换。
I/O指令可以读取和写入外部设备的数字信号和模拟信号。
此外,ABB工业机器人还支持与其他设备的通信和数据传输,如通过以太网、串口和CAN总线等方式进行数据交互。
总结:ABB工业机器人的编程是一项复杂而重要的工作,程序的编写需要了解RAPID语言的语法和结构,掌握变量和数据类型的使用,熟悉基本运算和控制流程的操作,熟练运用函数和子程序的编写,掌握机器人运动控制的方法,了解I/O和通信的原理。

ABB工业机器人焊接编程程序详细介绍对于OLP中Speed和Zone值的设定:Zone值一般情况下,要根据机器人运动速度和对运动的精度要求来确定,即Zone与Speed值是相关的。
1. 通常在开阔而又无高精度要求的情况下,速度值设为V3000,通常自动化把这个速度定义为Vmax,(这个Vmax与OLP中Speed 值可选项中的Vmax稍不同,理论中,机器人的Vmax应该等于V8000左右,但实际情况下,这个速度仅为3000mm/s左右),此时与之对应的Zone值设置为z200—z500之间,过小的Zone值会造成机器人运动时候的停顿和扰动,特别是机器人负载较重的时候。
2. 焊接过程中,速度一般为V1000---V1500,有时候自动化也会把V1500这个速度定义为Vmid,此时设置的Zone值一般为z5--z150之间。
通常情况,在这个速度下,Zone值设置为z50;空间不太受限制,也可以把Zone加大到z150;在空间比较狭小的地方,z 值设置为z5—z10;对于焊点,Zone值设置为fine。
3. 速度一般为V500以下,有时候自动化也会把V500这个速度定义为Vmin,这个速度一般在位置特别紧张的情况和快换对接的位置点使用。
对于Wobj的设置:一般来说,与工件有联系的机器人路径,才会设置与车型相关的wobj,如wobj-v212, wobj-w204等;而与工件无关的路径,选用的就是wobj0,这个wobj是与机器人相关的,在程序输出时,不会显示在程序段中。
换句话说,就是与工件没有联系的路径,程序中不带wobj。
与工件相关的路径:包括机器人焊接路径和抓放工件的dock和undock路径。
需要注意的是,在dock和undock路径的过程中,机器人不带抓手的部分,wobj选用的也是wobj0。
选用wobj0的路径,包括抓放枪路径,抓放抓手路径,从工件存放架上抓件的pickpart路径,修磨路径和其他服务路径。

ABB工业机器人编程基础操作首先,了解ABB工业机器人的编程结构是非常重要的。
ABB工业机器人的编程结构分为两部分:系统线程和任务线程。
系统线程负责处理系统级别的操作,如启动和停止机器人;任务线程负责执行具体的任务,如移动、抓取和放置物体等。
在进行ABB工业机器人编程之前,首先需要做的是设置正确的工具。
工具是机器人的末端设备,用于执行实际的任务。
设置正确的工具是确保机器人能够准确执行任务的关键。
接下来,我们需要创建机器人的程序。
ABB工业机器人的编程语言是ABB自己开发的,称为RAPID(Robot Application ProgrammingInterface Development)。
RAPID是一种类似于C语言的高级编程语言,用于控制机器人的运动和操作。
我们可以使用ABB提供的编程环境RobotStudio来编写RAPID代码。
在编写RAPID代码之前,我们需要了解一些RAPID的基本语法和命令。
RAPID代码主要包括模块(Module)、过程(Procedure)和指令(Instruction)三个层次。
模块是RAPID程序的最高级别,一个模块可以包含多个过程,而一个过程可以包含多个指令。
在编写RAPID代码时,我们可以使用各种不同类型的指令来控制机器人的运动和操作。
例如,MoveL指令用于控制机器人进行直线运动,MoveJ指令用于控制机器人进行关节运动,Gripper指令用于控制机器人的夹爪等。
编写完RAPID代码之后,我们需要将其上传到机器人控制器中进行执行。
连接ABB工业机器人和电脑的方式有多种,一种常见的方式是通过以太网连接。
通过RobotStudio软件可以上传、运行和监控我们编写的程序。
除了RAPID编程,ABB工业机器人还支持其他编程方式,如示教编程和离线编程。
示教编程是通过手动操作机器人进行编程,可以快速实现简单的操作。
离线编程是在电脑上进行的编程,可以进行复杂的任务规划和路径优化。
ABB工业机器人编程第九章ABB工业机器人编程第九章:机器人轨迹编程入门随着工业自动化的快速发展,工业机器人技术已经成为现代制造业的重要组成部分。
ABB工业机器人作为行业领导者,其编程技术和操作技巧对于工业自动化领域的从业者来说具有重要意义。
本文将深入探讨ABB工业机器人编程第九章的内容,旨在帮助读者更好地理解和应用机器人轨迹编程。
在ABB工业机器人编程第九章中,我们主要关注机器人轨迹编程的基础知识和实践应用。
首先,我们需要明确轨迹编程的目的,即通过控制工业机器人的运动轨迹来执行各种任务。
为了实现这一目标,我们需要掌握轨迹编程的基本概念和常用指令。
在轨迹编程的学习过程中,我们需要注意以下几点:1、坐标系及其转换:了解机器人坐标系的概念以及不同坐标系之间的转换关系,对于正确设置机器人运动轨迹至关重要。
2、运动学与动力学:理解机器人的运动学和动力学特性,有助于我们编写高效且稳定的轨迹程序。
3、插补技术:掌握机器人轨迹插补原理和方法,可以实现机器人运动的平滑过渡,提高运动精度。
为了帮助读者更好地理解这些知识点,我们将通过具体案例进行演示和解析。
例如,我们将演示如何使用ABB提供的RAPID编程语言编写一个简单的轨迹程序,实现机器人在两个点之间平滑移动。
同时,我们还将探讨如何优化轨迹程序,提高机器人的运动效率和控制精度。
在总结ABB工业机器人编程第九章的内容时,我们强调了机器人轨迹编程的重要性以及相关知识点的学习和应用。
通过掌握坐标系转换、运动学与动力学以及插补技术,我们可以编写出高效且稳定的轨迹程序,实现工业自动化生产中的各种任务。
我们也提醒读者在实践过程中注意安全操作和编程规范,为工业自动化的广泛应用打下坚实基础。
总之,ABB工业机器人编程第九章为我们揭示了机器人轨迹编程的奥秘。
通过深入学习和理解这一章节的内容,我们可以更好地应用于实际生产过程中,提高生产效率和质量。
不断学习和探索新的自动化技术也将为我们开启更广阔的职业发展空间。
ABB[a]-J-6ABB 机器人的程序编程6.1 任务目标➢掌握常用的PAPID 程序指令。
➢掌握基本RAPID程序编写、调试、自动运行和保存模块。
6.2 任务描述◆建立程序模块test12.24,模块test12.24 下建立例行程序main 和Routine1,在main 程序下进行运动指令的基本操作练习。
◆掌握常用的RAPID 指令的使用方法。
◆建立一个可运行的基本RAPID程序,内容包括程序编写、调试、自动运行和保存模块。
6.3 知识储备6.3.1 程序模块与例行程序RAPID 程序中包含了一连串控制机器人的指令,执行这些指令可以实现对机器人的控制操作。
应用程序是使用称为RAPID 编程语言的特定词汇和语法编写而成的。
RAPID 是一种英文编程语言,所包含的指令可以移动机器人、设置输出、读取输入,还能实现决策、重复其他指令、构造程序、与系统操作员交流等功能。
RAPID 程序的基本架构如图所示:RAPID程序程序模块1程序模块2程序模块3程序模块4程序数据主程序main 例行程序中断程序功能程序数据例行程序中断程序功能…………程序数据例行程序中断程序功能RAPID 程序的架构说明:1)RAPID 程序是由程序模块与系统模块组成。
一般地,只通过新建程序模块来构建机器人的程序,而系统模块多用于系统方面的控制。
2)可以根据不同的用途创建多个程序模块,如专门用于主控制的程序模块,用于位置计算的程序模块,用于存放数据的程序模块,这样便于归类管理不同用途的例行程序与数据。
3)每一个程序模块包含了程序数据、例行程序、中断程序和功能四种对象,但不一定在一个模块中都1 / 40有这四种对象,程序模块之间的数据、例行程序、中断程序和功能是可以互相调用的。
4)在RAPID 程序中,只有一个主程序main,并且存在于任意一个程序模块中,并且是作为整个RAPID 程序执行的起点。
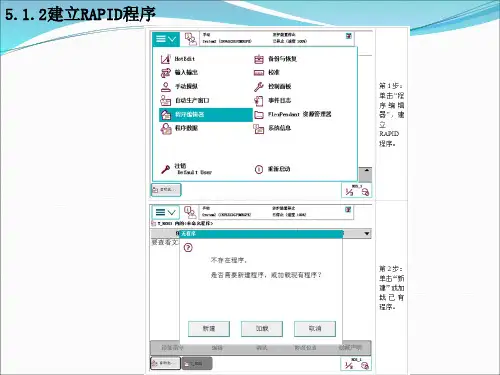
操作步骤:1. 单击“程序编辑器”,查看RAPID 程序。