红外避障传感器简介
- 格式:doc
- 大小:82.00 KB
- 文档页数:4
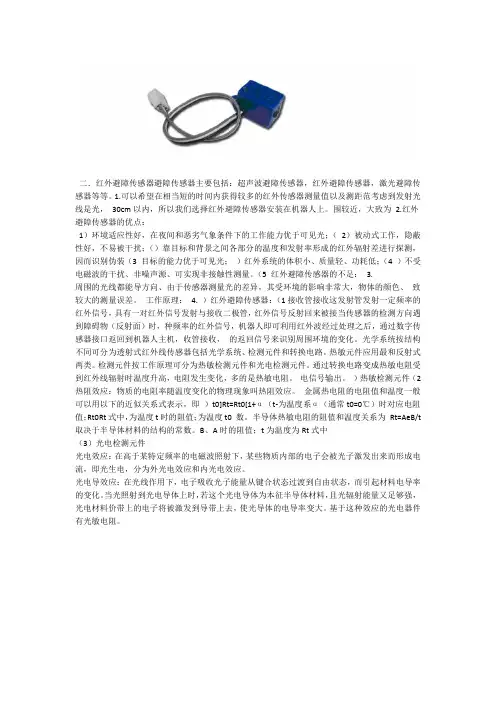
二.红外避障传感器避障传感器主要包括:超声波避障传感器,红外避障传感器,激光避障传感器等等。
1.可以希望在相当短的时间内获得较多的红外传感器测量值以及测距范考虑到发射光线是光,30cm以内,所以我们选择红外避障传感器安装在机器人上。
围较近,大致为 2.红外避障传感器的优点:1)环境适应性好,在夜间和恶劣气象条件下的工作能力优于可见光;(2)被动式工作,隐蔽性好,不易被干扰;()靠目标和背景之间各部分的温度和发射率形成的红外辐射差进行探测,因而识别伪装(3 目标的能力优于可见光;)红外系统的体积小、质量轻、功耗低;(4 )不受电磁波的干扰、非噪声源、可实现非接触性测量。
(5 红外避障传感器的不足: 3.周围的光线都能导方向、由于传感器测量光的差异,其受环境的影响非常大,物体的颜色、致较大的测量误差。
工作原理: 4. )红外避障传感器:(1接收管接收这发射管发射一定频率的红外信号,具有一对红外信号发射与接收二极管,红外信号反射回来被接当传感器的检测方向遇到障碍物(反射面)时,种频率的红外信号,机器人即可利用红外波经过处理之后,通过数字传感器接口返回到机器人主机,收管接收,的返回信号来识别周围环境的变化。
光学系统按结构不同可分为透射式红外线传感器包括光学系统、检测元件和转换电路。
热敏元件应用最和反射式两类。
检测元件按工作原理可分为热敏检测元件和光电检测元件。
通过转换电路变成热敏电阻受到红外线辐射时温度升高,电阻发生变化,多的是热敏电阻。
电信号输出。
)热敏检测元件(2 热阻效应:物质的电阻率随温度变化的物理现象叫热阻效应。
金属热电阻的电阻值和温度一般可以用以下的近似关系式表示,即)t0]Rt=Rt0[1+α(t-为温度系α(通常t0=0℃)时对应电阻值;Rt0Rt式中,为温度t时的阻值;为温度t0 数。
半导体热敏电阻的阻值和温度关系为Rt=AeB/t 取决于半导体材料的结构的常数。
B、A时的阻值;t为温度为Rt式中(3)光电检测元件光电效应:在高于某特定频率的电磁波照射下,某些物质内部的电子会被光子激发出来而形成电流,即光生电,分为外光电效应和内光电效应。

红外避障传感器使用说明书型号WT_IROA本红外避障传感器,只有使用说明,没有设计的原理图。
本红外避障传感器,可以检测到前方3-35CM 范围的障碍物。
额定工作电压为5V ,电路板上设计有电源工作指示灯。
当检测到障碍物时,输出低电平。
电路板尺寸:22.8mm*26.4mm 。
引脚说明及调试方式如下图:调节频率电位器,可以调节发射管的发射红外线的频率,红外解码一般采用38KHZ 的脉冲,如果多只红外避障传感器一起使用时,也可以利这个电位器,调节不同的发射频率以减少传感器之间相互干扰。
出厂时,已经调节好。
调节距离电位器,用于调节发射的功率,向右旋转发射功率变大,反之变小。
发射功率越大,检测的距离越远,但如果太大,可能会引起接收头一直接收到红外的脉冲,会造成红外避障检测失败,注意适量调节,使用者可以在红外发射中套上黑色的热缩管,以减少红外光线泄露,同时可以使用红外光线有一定的方向性。
至于热缩管的长度,使用者可以自行试验以获得最佳的效果。
引脚说明,从左到右分别为:5V ,GND ,OUT ,EN 。
其中OUT 为传感器的输出引脚,当前方有障碍物时,输出低电平,同时电路板上也有对应LED 变亮。
EN 引脚为控制传感器的使能引脚,低电平有效。
同时为了方便三线制的传感器,本电路板上设计了一个可以直接跳线使能的。
使用跳线帽即可。
经过本让的测试,本传感器,工作在4.5V-5.5V 下,工作都可以常地检测到障碍物。
使用时,注意电源的极性不要接反,否则会损坏芯片。
请欣赏此传感器,在智能小车上的应用图。
调节频率 调节距离使能跳线帽1 2 3 45V GND OUTEN。

红外避障传感器工作原理一、引言红外避障传感器是一种常见的电子产品,它通过发射和接收红外信号来检测物体的距离和位置,从而实现避障功能。
本文将详细介绍红外避障传感器的工作原理。
二、红外信号红外信号是指波长在0.75-1000微米之间的电磁波。
人眼无法看到这些波长范围内的光线,但是它们可以被一些电子设备所探测到。
红外信号在工业、医疗、安防等领域有着广泛的应用。
三、红外避障传感器结构红外避障传感器通常由发射模块和接收模块组成。
发射模块负责发射红外信号,接收模块负责接收反射回来的信号,并将其转换为电信号输出。
四、工作原理1. 发射模块发射模块通常由一个红外二极管组成。
当二极管被通电时,会产生一个特定频率和波长的光线。
这个频率和波长通常是38kHz和940nm。
2. 接收模块接收模块通常由一个红外接收头和一个信号处理电路组成。
当发射模块发出红外信号后,如果有物体遮挡在传感器前方,一部分光线会被物体反射回来,并被接收头接收。
接收头将这个信号转换为电信号,并将其送入信号处理电路中。
3. 信号处理信号处理电路通常由一个滤波器和一个比较器组成。
滤波器用于过滤掉杂波和干扰,只保留38kHz的频率。
比较器用于将接收到的信号与一个参考值进行比较,从而判断是否有物体遮挡在传感器前方。
五、应用场景红外避障传感器可以应用于机器人、智能家居、智能车等领域。
它可以检测机器人或车辆前方是否有障碍物,并及时做出反应,从而避免碰撞和损坏。
六、总结红外避障传感器通过发射和接收红外信号来检测物体的距离和位置,从而实现避障功能。
它由发射模块和接收模块组成,其中发射模块负责发射红外信号,接收模块负责接收反射回来的信号,并将其转换为电信号输出。
红外避障传感器在机器人、智能家居、智能车等领域有着广泛的应用。
红外避障模块原理
红外避障模块是一种常用于智能小车、机器人等设备上的传感器模块,它能够
通过红外线来检测前方是否有障碍物,并向控制系统发送信号,从而实现避障功能。
那么,红外避障模块是如何实现这一功能的呢?接下来,我们将从原理方面进行详细介绍。
首先,红外避障模块由红外发射器和红外接收器组成。
红外发射器会发射一束
红外线,而红外接收器则会接收这束红外线。
当没有障碍物时,发射器发出的红外线会直接被接收器接收到;当有障碍物挡住红外线时,接收器就无法接收到完整的红外线。
这样,通过检测接收到的红外线的强弱,就可以判断前方是否有障碍物以及障碍物的距离。
其次,红外避障模块通过测量红外线的反射情况来判断障碍物的距离。
红外线
遇到障碍物后会发生反射,而红外接收器接收到的反射红外线的强度与距离成反比。
因此,通过测量接收到的红外线的强度,就可以间接地得知障碍物与红外避障模块的距离。
最后,红外避障模块通过处理接收到的红外信号来实现障碍物的识别。
一般来说,红外避障模块会将接收到的红外信号转换成数字信号,然后通过比较信号的强度来判断前方是否有障碍物以及障碍物的距离。
在实际应用中,可以根据具体情况设置不同的阈值,从而实现对不同距离障碍物的识别。
总的来说,红外避障模块通过发射和接收红外线,测量反射红外线的强度,并
处理接收到的红外信号,来实现对障碍物的检测和识别。
它在智能小车、机器人等设备中发挥着重要作用,为这些设备的自主避障功能提供了技术支持。
希望通过本文的介绍,能够让大家对红外避障模块的原理有一个更加清晰的理解。
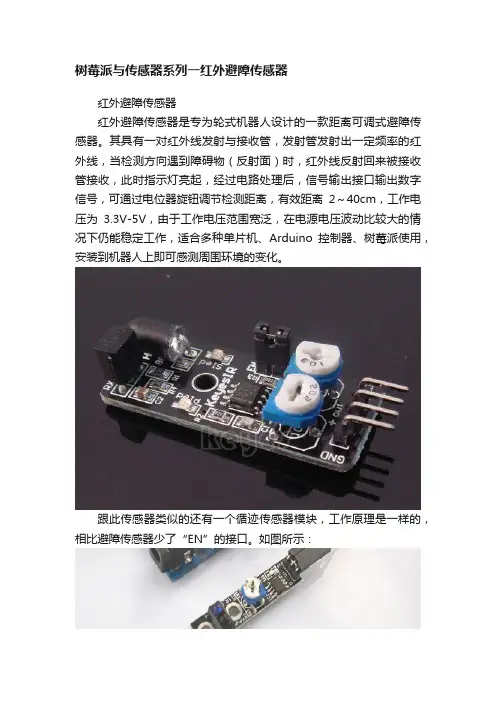
树莓派与传感器系列一红外避障传感器红外避障传感器红外避障传感器是专为轮式机器人设计的一款距离可调式避障传感器。
其具有一对红外线发射与接收管,发射管发射出一定频率的红外线,当检测方向遇到障碍物(反射面)时,红外线反射回来被接收管接收,此时指示灯亮起,经过电路处理后,信号输出接口输出数字信号,可通过电位器旋钮调节检测距离,有效距离2~40cm,工作电压为3.3V-5V,由于工作电压范围宽泛,在电源电压波动比较大的情况下仍能稳定工作,适合多种单片机、Arduino控制器、树莓派使用,安装到机器人上即可感测周围环境的变化。
跟此传感器类似的还有一个循迹传感器模块,工作原理是一样的,相比避障传感器少了“EN”的接口。
如图所示:规格参数:1.工作电压:DC 3.3V-5V2.工作电流:≥20mA3.工作温度:-10℃—+50℃4.检测距离:2-40cm5.IO接口:4线制接口(-/+/S/EN)6.输出信号:TTL电平(有障碍物低电平,无障碍物高电平)7.调节方式:多圈电阻式调节8.有效角度:35°7.尺寸大小:28mm×23mm控制红外避障传感器1、所需材料:· 红外避障模块一个· 树莓派· LED等一只· 连接线数根2、引脚连接说明:红外避障模块树莓派GND GND+ +5VOUT GPIO 23EN 不接悬空LED灯树莓派短脚GND长脚GPIO 21注:接树莓派的GPIO口可能略有不同,小编用的是树莓派2代版,有些GPIO口使用B版的同学可能找不到,这没有关系,懂了原理,无所谓接口。
整体实物连接图:python代码:#!/usr/bin/python#-*- coding: utf-8 -*-import timeimport RPi.GPIO as GPIOimport osGPIO.setmode(GPIO.BCM) #使用BCM编码方式#定义引脚GPIO_OUT = 23led = 21#设置23针脚为输入,接到红外避障传感器模块的out引脚GPIO.setup(GPIO_OUT,GPIO.IN)GPIO.setup(led,GPIO.OUT)def warn(): #亮灯来作为有障碍物时发出的警告GPIO.output(led,GPIO.HIGH)time.sleep(0.5)GPIO.output(led,GPIO.LOW)time.sleep(0.5)while True:if GPIO.input(GPIO_OUT)==0: #当有障碍物时,传感器输出低电平,所以检测低电平warn()GPIO.cleanup()保存代码执行,然后将手挡在传感器前,就会看到led灯一闪一闪的,拿开手时,led灯将熄灭。
红外避障传感器原理一、红外避障传感器原理红外避障传感器是一种非接触式无损伤传感器,能够检测物体的位置和运动方向,最常用的是发射红外线和接收红外线来实现运动物体的避障。
红外避障传感器包括发射器和接收器,发射器发射出一束红外线,照射到要检测的物体,当物体处在红外线照射范围内,发射器能接收到红外线,这时接收器将发出报警信号提醒运动物体,从而避免发生安全事故。
红外避障传感器可以检测物体的位置和移动方向,在自动化装置的设计中得到了广泛应用,如机器人的避障,自动门的开启,智能家居的安全报警系统等,具有检测距离远,无损伤、不受环境影响、安全可靠等优点。
二、红外避障传感器结构红外避障传感器结构主要包括红外发射模块、红外接收模块和控制模块。
1、红外发射模块:由LED发射红外线,控制LED发射的红外线照射到物体,当物体处在红外线照射范围内时,红外线就会被反射或吸收。
2、红外接收模块:由探测器接收红外线,探测器是一种特殊的电路,能够探测物体是否处在红外线照射范围内,探测器还可以测量物体的距离,检测物体的运动方向等。
3、控制模块:由控制器控制LED的开启,检测物体的情况,当发现物体处在红外线照射范围内时,控制器会发出报警信号提醒运动物体,从而避免发生安全事故。
三、红外避障传感器应用1、机器人避障:红外避障传感器可以用于机器人的避障,在机器人运动的过程中,可以检测到物体的位置,当发现物体处在红外线照射范围内,控制器会发出报警信号提醒机器人,从而避免发生安全事故。
2、自动门:红外避障传感器也可以用于自动开启门,在门的两侧安装红外避障传感器,当探测到物体出现在红外线照射范围内时,通过控制模块自动开启门,方便人们的出入。
3、智能家居:红外避障传感器还可以用于智能家居的安全报警系统,当发现有人破门入室时,报警器会发出警报,保护家庭安全。

红外避障传感器简介红外避障传感器介绍(反射型)日期:2006-5-16 14:05:14 来源: 点击: 1572 添加到收藏夹实图:技术指标:主体外形尺寸:23×15.3×15.1mm(长×宽×高)重量:7g额定电压:直流电源5.0V检测范围(反射面为白色木板):1~ 40cm(挡板为白色时检测距离在40cm时达到临界点,超过此数值后检测效果变差)调节方式:多圈电阻式调节,逆时针方向旋转功率变小,顺时针方向旋转功率变大返回值:有信号(高电平)返回值为“1”,无信号(低电平)返回值为“0” 状态指示方式:检测到信号指示灯亮红灯,无信号不亮安装方式:单颗Ø3螺丝安装线长:17.4cm?0.2cm(有效距离)连接方式:单条3芯排线,2510型3脚插头有效角度:30:左右原理与功能红外避障传感器(以下简称红外)。
红外具有一对红外信号发射与接收二极管,发射管发射一定频率的红外信号,接收管接收这种频率的红外信号,当红外的检测方向遇到障碍物(反射面)时,红外信号反射回来被接收管接收,经过处理之后,通过数字传感器接口返回到机器人主机,机器人即可利用红外波的返回信号来识别周围环境的变化。
应用介绍:红外是通过发射端发射红外信号,接收端接收由障碍物反射回来的红外信号,来判断是否有障碍物。
项目应用红外避障传感器在很多项目中都有使用。
在初中灭火、高中搜救项目中,机器人可以通过红外避障传感器走迷宫;在轨迹项目中,机器人可以通过黑、白色对红外线的反射和吸收值不同而用红外避障传感器来识别黑色的轨迹线。
注意事项:1、红外是数字传感器,红外接收管只有在接收到一定强度的红外信号时才会有数值的变化。
障碍物(反射面)太小时,红外会检测不到;障碍物(反射面)颜色为黑色或深色时,会被吸收大部分的红外信号,而只反射回一小部分,导致红外接收管接收到的红外信号强度不够,不足以产生有障碍物(反射面)的信号。
红外避障原理
红外避障技术是一种利用红外线传感器来检测前方障碍物并进行相应控制的技术。
它主要应用于智能家居、智能车辆、机器人等领域,通过红外线传感器的工作原理,实现对障碍物的检测和避让,从而提高设备的智能化和安全性。
红外线传感器是通过发射红外线来探测周围环境的传感器,它的工作原理是利用红外线的反射和吸收特性。
当红外线遇到障碍物时,会被障碍物反射或吸收,传感器接收到的信号就会发生变化,从而判断出是否有障碍物存在。
在红外避障技术中,通常会使用红外发射器和红外接收器配合工作。
红外发射器会发射一束红外线,然后红外接收器会接收到反射回来的红外线。
通过测量反射回来的红外线的强度和时间,就可以判断出障碍物的距离和位置。
红外避障技术的原理比较简单,但是在实际应用中需要考虑一些因素。
首先是环境因素,不同的环境会对红外线的传播产生影响,比如光照强度、温度等因素都会影响红外线的传播和接收。
其次是障碍物的特性,不同的材质和颜色的障碍物对红外线的反射和吸收也会有所不同。
为了提高红外避障技术的准确性和稳定性,通常会采用一些辅助手段,比如滤波器、增益控制、信号处理等技术来对传感器的信号进行处理和优化。
同时,还可以通过多传感器融合的方式来提高避障系统的性能,比如结合超声波、激光雷达等传感器来实现更精准的障碍物检测和定位。
总的来说,红外避障技术是一种简单而有效的障碍物检测和避让技术,它通过利用红外线传感器的工作原理,实现对障碍物的快速检测和响应。
在未来的智能化领域,红外避障技术将会得到更广泛的应用和发展。
红外避障传感器原理
红外避障传感器是一种常用的传感器,它利用红外线来检测前
方是否有障碍物,并通过信号输出来实现避障功能。
其原理主要基
于红外线的发射和接收。
首先,红外避障传感器内部包含一个红外发射器和一个红外接
收器。
红外发射器会发射一束红外线,这种红外线在人眼中是看不
见的,但在传感器内部会产生一定的光强。
当这束红外线遇到障碍
物时,会被障碍物反射回来,被红外接收器接收。
其次,红外接收器接收到反射回来的红外线后,会将其转化为
电信号。
这个电信号的强度与红外线的反射程度成正比,也就是说,当有障碍物靠近传感器时,反射回来的红外线会更强,电信号也会
更大。
然后,传感器会根据接收到的电信号来判断前方是否有障碍物。
一般来说,传感器会设定一个阈值,当接收到的电信号超过这个阈
值时,就会输出一个信号,表示检测到了障碍物;反之,则表示前
方没有障碍物。
最后,通过对传感器输出信号的处理,可以实现对障碍物的避让。
比如,可以通过控制机器人的行进方向,使其避开检测到的障
碍物,从而实现避障功能。
总的来说,红外避障传感器的原理是利用红外线的发射和接收,通过检测反射回来的红外线的强度来判断前方是否有障碍物,从而
实现避障功能。
这种传感器在机器人、智能家居等领域有着广泛的
应用,为实现智能化、自动化提供了重要的技术支持。
扫地机器人的红外避障技术扫地机器人的出现极大地方便了人们的生活。
它们可以自动地清扫房间、吸尘、拖地等,无需人工干预。
其中,红外避障技术是扫地机器人关键的功能之一。
本文将探讨扫地机器人的红外避障技术,并分析其原理和应用。
一、红外避障技术的原理红外避障技术是利用红外传感器感知前方障碍物并做出相应的反应。
扫地机器人通过装配在机器人正面或四周的红外传感器,实时监测周围环境。
红外传感器会发射一束红外线,当遇到物体时,物体会反射红外线返回传感器。
通过测量红外线的强度及返回时间,扫地机器人可以判断障碍物的距离和尺寸。
一般来说,返回时间越短,距离越近,机器人就会做出相应的避障动作。
二、红外避障技术的应用红外避障技术在扫地机器人中有多种应用。
下面将分别介绍在导航和避障方面的应用。
1. 导航扫地机器人可以借助红外避障技术进行导航,确保其能够准确无误地清扫每一个角落。
红外传感器可以帮助机器人探测并跟踪墙壁、家具等固定物体的位置,从而使机器人在室内环境中具备定位和导航能力。
2. 避障扫地机器人必须具备避障能力,以免碰撞或卡住障碍物。
红外避障技术可以及时感知到遇到的障碍物,并让机器人采取相应的动作避免碰撞。
例如,当机器人检测到前方有障碍物靠近时,它可以自动改变方向或停下来等待。
三、红外避障技术的优势红外避障技术在扫地机器人中具有以下几个优势:1. 高灵敏度: 红外传感器对周围环境变化的感知非常敏锐,能够快速、准确地检测障碍物。
2. 快速响应: 由于红外线传输速度非常快,扫地机器人能够在瞬间感知到障碍物并做出相应的反应,避免碰撞。
3. 低能耗: 红外传感器的功耗较低,使得扫地机器人在长时间工作时能够更加高效地利用电量。
4. 适应性强: 红外线能够穿透一些薄的材料,如窗帘,从而在不同的环境下实现避障,适应性更强。
四、红外避障技术的局限性红外避障技术在应用中也存在一些局限性。
1. 距离限制: 红外传感器的探测距离有限,一般在几米以内。
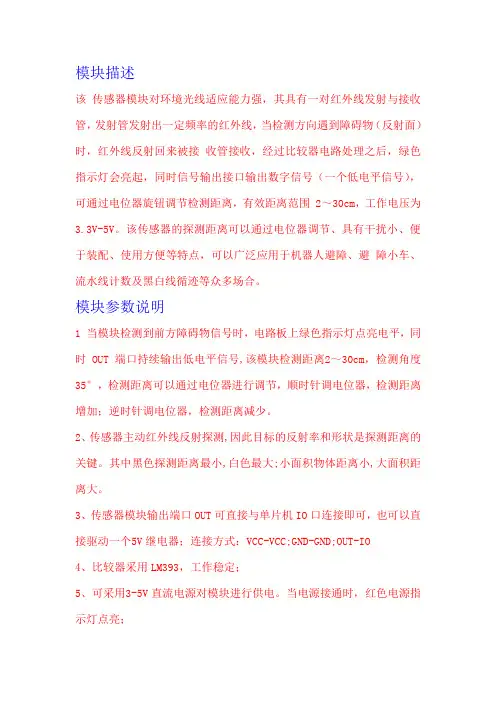
模块描述该传感器模块对环境光线适应能力强,其具有一对红外线发射与接收管,发射管发射出一定频率的红外线,当检测方向遇到障碍物(反射面)时,红外线反射回来被接收管接收,经过比较器电路处理之后,绿色指示灯会亮起,同时信号输出接口输出数字信号(一个低电平信号),可通过电位器旋钮调节检测距离,有效距离范围 2~30cm,工作电压为3.3V-5V。
该传感器的探测距离可以通过电位器调节、具有干扰小、便于装配、使用方便等特点,可以广泛应用于机器人避障、避障小车、流水线计数及黑白线循迹等众多场合。
模块参数说明1 当模块检测到前方障碍物信号时,电路板上绿色指示灯点亮电平,同时OUT端口持续输出低电平信号,该模块检测距离2~30cm,检测角度35°,检测距离可以通过电位器进行调节,顺时针调电位器,检测距离增加;逆时针调电位器,检测距离减少。
2、传感器主动红外线反射探测,因此目标的反射率和形状是探测距离的关键。
其中黑色探测距离最小,白色最大;小面积物体距离小,大面积距离大。
3、传感器模块输出端口OUT可直接与单片机IO口连接即可,也可以直接驱动一个5V继电器;连接方式:VCC-VCC;GND-GND;OUT-IO4、比较器采用LM393,工作稳定;5、可采用3-5V直流电源对模块进行供电。
当电源接通时,红色电源指示灯点亮;6、具有3mm的螺丝孔,便于固定、安装;7、电路板尺寸:3.2CM*1.4CM8、每个模块在发货已经将阈值比较电压通过电位器调节好,非特殊情况,请勿随意调节电位器。
模块接口说明1 VCC 外接3.3V-5V电压(可以直接与5v单片机和3.3v单片机相连)2 GND 外接GND3 OUT 小板数字量输出接口(0和1)发货清单1 如图所示壁障传感器模块一块。
红外避障小车原理介绍
红外避障小车是一种利用红外线传感器进行避障操作的智能小车。
其原理基于红外线传感器的工作原理,通过发射红外线并接收反射回来的信号来判断前方是否有障碍物。
红外线传感器是一种能够感受和测量红外线辐射的装置。
它通过发射红外线并利用接收器接收反射回来的红外线信号,然后将信号转换成电信号进行处理。
在红外避障小车中,通常会使用多个红外线传感器分布在小车的前方。
当红外线传感器发射的红外线信号被障碍物反射回来时,传感器接收到的信号强度会发生变化。
通过测量信号强度的变化,可以判断前方是否存在障碍物。
如果信号强度足够高,表示前方没有障碍物;而如果信号强度较弱,表示前方有障碍物。
基于这样的原理,红外避障小车可以实现自主避障的功能。
当小车前方的红外线传感器检测到障碍物时,控制系统会立即做出响应,比如停下或者转向以规避障碍物。
通过不断地检测和响应,小车可以在遇到障碍物时自动调整行驶路径,避免碰撞。
红外避障小车的原理简单而有效,广泛应用于自动导航、智能机器人等领域。
它可以提高小车的可靠性和安全性,使其能够自主地在复杂环境中行驶。
同时,红外线传感器也具有较低的成本和易于使用的特点,使得红外避障小车成为一种受欢迎的智能设备。
一、实验原理:避障传感器基本原理,和循迹传感器工作原理基本相同,利用物体的反射性质。
在一定范围内,如果没有障碍物,发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失。
如果有障碍物,红外线遇到障碍物,被反射到达传感器接收头。
传感器检测到这一信号,就可以确认正前方有障碍物,并送给单片机,单片机进行一系列的处理分析,协调小车两轮工作,完成一个漂亮的躲避障碍物动作,传感器原理图如图6。
图6 红外避障传感器原理图二、实验接线:实验时只需把信号输出端(signal)与单片机的P1^0口相连。
VCC端接5V电源,GND接电源负极或单片机上的逻辑地。
注意:如果对红外避障传感器的使能感兴趣,可以把传感器的TC端接单片机的I/O口,通过控制TC实现是否开启红外避障传感器,当TC 为高电平时传感器工作,为低电平时,传感器关闭,参照图7。
三、实验任务:1、把红外避障传感器固定在小车的正前方,接好线。
注意:红外传感器的避障距离也是可调,调节滑动变阻器可以调节避障距离。
2、编制程序,实现小车检测到前方有障碍物时,向左转弯,再检测,没有障碍物,继续前进,有障碍物,继续左转弯。
图7 避障传感器与单片机连接图四、红外避障传感器电路分析:电路中HEF4011BT是一个4通道2输入与非门。
455是晶振,它产生38k的方波,HEF4024BT是7位二进制计数器,38k的方波作为计数器HEF4024BT的时钟输入。
HEF4024BT的O2与O3接与非门加一个非门去控制HEF4024BT的复位端。
也就是说当HEF4024BT计数到第四位与第三位同时为1时,HEF4024BT就会被清零。
同时当HEF4024BT的O3为1时,HEF4011BT的O4为低电平,触发红外发光二极管发送信号。
当HEF4024BT的O3为0时,HEF4011BT的O4为高电平,关闭发光二极管,这段时间为4个方波周期。
也就实现了38k载波调制的红外。
接收头是红外线一体化接收头是集红外接收、放大、滤波和比较器输出的模块。
红外避障原理红外避障技术是一种利用红外线传感器来检测障碍物并进行避让的技术。
它在许多自动化系统中得到了广泛的应用,如智能家居、无人驾驶车辆、机器人等领域。
其原理是利用红外线传感器发射红外线,当红外线遇到障碍物时,会被障碍物反射回来,传感器接收到这些反射的红外线信号,并根据信号的强弱来判断障碍物的距离和位置,从而实现避障功能。
红外避障原理的核心在于红外线传感器的工作原理。
红外线传感器是一种能够感知红外线的电子器件,它能够将接收到的红外线信号转化为电信号输出。
当没有障碍物时,红外线传感器发射的红外线会直接照射到周围环境,没有反射回来的信号;而当有障碍物时,障碍物会反射部分红外线回到传感器,传感器就能够接收到这些反射的红外线信号。
通过测量接收到的反射信号的强弱,红外线传感器就能够判断出障碍物的距离和位置。
红外避障技术的实现主要分为两个步骤,红外线的发射和接收。
首先是红外线的发射,红外线传感器会通过内部的红外发射器发射一束红外线,这些红外线会以一定的频率和波长向外发射。
然后是红外线的接收,红外线传感器内部的接收器会接收到反射回来的红外线信号,并将其转化为电信号输出。
接收到的信号会经过放大、滤波等处理,最终转化为数字信号输出给控制系统进行处理。
在实际应用中,红外避障技术可以与其他传感器相结合,如超声波传感器、摄像头等,以提高避障的准确性和稳定性。
例如在无人驾驶车辆中,红外避障技术可以用于检测车辆前方的障碍物,而摄像头可以用于识别交通标志和行人,两者结合可以更好地实现自动驾驶功能。
总的来说,红外避障技术通过利用红外线传感器来检测障碍物,并通过控制系统进行避让,实现了自动化系统对环境的感知和交互。
它在自动化领域发挥着重要作用,为智能设备的发展提供了有力支持。
希望通过本文的介绍,能够让读者对红外避障技术有更深入的了解,为相关领域的研究和应用提供参考。
二.黑中躲障传感器之阳早格格创做1.躲障传感器主要包罗:超声波躲障传感器,黑中躲障传感器,激光躲障传感器等等.思量到收射光芒是光,不妨期视正在相称短的时间内赢得较多的黑中传感器丈量值以及测距范畴较近,大概为30cm以内,所以咱们采用黑中躲障传感器拆置正在呆板人上.2.黑中躲障传感器的便宜:(1)环境符合性好,正在夜间战恶劣局里条件下的处事本收劣于可睹光;(2)主动式处事,湮没性好,没有简单被搞扰;(3)靠目标战背景之间各部分的温度战收射率产死的黑中辐射好举止探测,果而辨别真拆目目标本收劣于可睹光;(4)黑中系统的体积小、品量沉、功耗矮;(5)没有受电磁波的搞扰、非噪声源、可真止非交触性丈量.3.黑中躲障传感器的缺累:由于传感器丈量光的好别,其受环境的效率非常大,物体的颜色、目标、周围的光芒皆能引导较大的丈量缺面.4.处事本理:(1)黑中躲障传感器:具备一对于黑中旗号收射与交支二极管,收射管收射一定频次的黑中旗号,交支管交支那种频次的黑中旗号,当传感器的检测目标逢到障碍物(反射里)时,黑中旗号反射回去被交支管交支,通过处理之后,通过数字传感器交心返回到呆板人主机,呆板人即可利用黑中波的返回旗号去辨别周围环境的变更.黑中线传感器包罗光教系统、检测元件战变换电路.光教系统按结构分歧可分为透射式战反射式二类.检测元件按处事本理可分为热敏检测元件战光电检测元件.热敏元件应用最多的是热敏电阻.热敏电阻受到黑中线辐射时温度降下,电阻爆收变更,通过变换电路形成电旗号输出.(2)热敏检测元件热阻效力:物量的电阻率随温度变更的物理局里喊热阻效力.金属热电阻的电阻值战温度普遍不妨用以下的近似闭系式表示,即Rt=Rt0[1+α(t-t0)]式中,Rt为温度t时的阻值;Rt0为温度t0(常常t0=0℃)时对于应电阻值;α为温度系数.半导体热敏电阻的阻值战温度闭系为Rt=AeB/t式中Rt为温度为t时的阻值;A、B与决于半导体资料的结构的常数.(3)光电检测元件光电效力:正在下于某特定频次的电磁波映照下,某些物量里里的电子会被光子激励出去而产死电流,即光死电,分为中光电效力战内光电效力.光电导效力:正在光芒效率下,电子吸支光子能量从键合状态过度到自由状态,而引起资料电导率的变更.当光映照到光电导体上时,若那个光电导体为本征半导体资料,且光辐射能量又脚够强,光电资料价戴上的电子将被激励到导戴上去,使光导体的电导率变大.鉴于那种效力的光电器件有光敏电阻.(4)黑中收射二极管的采用黑中收射二极管分为很多种.黑中收射二极管普遍按峰值波少(λp)主要为:850nm、870nm、880nm、940nm、980nm,当前商场上使用较多为850nm战940nm二种.本次安排所使用的是峰值波少为940nm的黑中收射二极管.940nm黑中收射二极管便宜:光强度下,赞同速度快,可用脉冲启动,无色透明环氧树脂.其主要应用范畴:黑中遥控系统,黑中探测系统,黑中幕墙保安系统,磁戴、光盘监测器,光电启闭/光传感器,主动黑中夜视仪,电脑、脚机等便携设备的黑中数据传输系统.正在使用黑中收射二极管时,收射管的辐射强度(Power)与输进电流(If)成正比.辐射强度:Power(单位:W,W/sr,W/cm2),用以表示黑中线收光二极管(IR)其辐射黑中线能量之大小.收射距离与辐射强度(Power) 成正比.W/sr:表示黑中线辐射强度的单位,为IR收射黑中线光之单位坐体角(sr)所辐射出的光功率的大小.W/cm2:表示照度的单位,为sensor单位里积(cm2)所交支IR收射之辐射功率的大小.半功率角:2θ½ 指黑中线二极管其上下或者安排二边所辐射出之黑中线强度为该组件最大辐射强度的50%时,其上下或者安排二边所夹的角度称为半功率角.(5)黑中交支器的采用本次安排采用HS38B,该器件个性:矮功耗、下敏捷度、劣良的抗搞扰本收.普遍用于家用电器、玩具等遥控交支.黑中交支器的电路本理框图黑中收射与交支器电路图黑中线二极管收射黑中光芒,如果呆板人前里有障碍物,黑中线从物体反射回去,相称于呆板人眼睛的黑中检测(交支)器,检测到反射回的黑中光芒,并收出旗号去标明检测到从物体反射回黑中线.黑中线交支器有内置的光滤波器,除了需要检测的940nm波少的黑中线中,他险些没有允许其余光通过.黑中检测器另有一个电子滤波器,它只允许约莫38.0KHz的电旗号通过.那里使用三极管9013的本果是9013的基区搞得很薄,当按图交时,收射结正偏偏,集电结反偏偏,收射区背基区注进电子,那时由于集电结反偏偏,对于基区的电子有很强的吸引力,所以由收射区注进基区的电子大部分加进集电区,于是集电极的电流删大.由于C51的I/O 启动本收较强,加进三极管使其处事正在启闭状态,用小电流去统造大电流.当P1_3(P3_6)置下电通常,从集电区经基区到收射区电路导通,加载正在LED 上的电压为VCC (5V ),LED 背中收射黑中线;当P1_3(P3_6)置矮电通常,电路又断启,LED 停止收射.本次安排提供了5V 宁静曲流电压,给LED 串联一个470Ω的电阻助闲限流.当三极管导通时,流过LED 的电流正在10mA 安排,使 LED旗号输出由默认的下电仄形成矮电仄.收光二极管有了电压好,所以旗号指示灯明,说明前圆有障碍,共时旗号输出给单片机,由单片机由电仄的变更去统造电效果的处事真止躲障.6.注意事项:(1)黑中是数字传感器,黑中交支管惟有正在交支到一定强度的黑中旗号时才会罕见值的变更.障碍物(反射里)太小时,黑中会检测没有到;障碍物(反射里)颜色为乌色或者深色时,会被吸支大部分的黑中旗号,而只反射回一小部分,引导黑中交支管交支到的黑中旗号强度没有敷,缺累以爆收有障碍物(反射里)的旗号.(2)黑中表温光源的映照下(如黑炽灯、太阳光)检测受到很大效率,它会受到所有相近黑中旗号的搞扰,黑炽灯战太阳光中含有黑中旗号身分较多,对于黑中的效率也较大.黑皮毛互之间也存留搞扰,果而正在使用时需要注意.(3)黑中采与的是收射、交支本理,分歧反射里对于黑中旗号的吸支与集射,将效率其检测范畴,根据尝试红色的反射里效验最好,红色其次,乌色最好;共时反射里的细糙度战仄坦度也会效率检测的效验.。
一、实验原理:避障传感器基本原理,和循迹传感器工作原理基本相同,利用物体的反射性质。
在一定范围内,如果没有障碍物,发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失。
如果有障碍物,红外线遇到障碍物,被反射到达传感器接收头。
传感器检测到这一信号,就可以确认正前方有障碍物,并送给单片机,单片机进行一系列的处理分析,协调小车两轮工作,完成一个漂亮的躲避障碍物动作,传感器原理图如图6。
图6 红外避障传感器原理图二、实验接线:实验时只需把信号输出端(signal)与单片机的P1^0口相连。
VCC端接5V电源,GND接电源负极或单片机上的逻辑地。
注意:如果对红外避障传感器的使能感兴趣,可以把传感器的TC端接单片机的I/O口,通过控制TC实现是否开启红外避障传感器,当TC 为高电平时传感器工作,为低电平时,传感器关闭,参照图7。
三、实验任务:1、把红外避障传感器固定在小车的正前方,接好线。
注意:红外传感器的避障距离也是可调,调节滑动变阻器可以调节避障距离。
2、编制程序,实现小车检测到前方有障碍物时,向左转弯,再检测,没有障碍物,继续前进,有障碍物,继续左转弯。
图7 避障传感器与单片机连接图四、红外避障传感器电路分析:电路中HEF4011BT是一个4通道2输入与非门。
455是晶振,它产生38k的方波,HEF4024BT是7位二进制计数器,38k的方波作为计数器HEF4024BT的时钟输入。
HEF4024BT的O2与O3接与非门加一个非门去控制HEF4024BT的复位端。
也就是说当HEF4024BT计数到第四位与第三位同时为1时,HEF4024BT就会被清零。
同时当HEF4024BT的O3为1时,HEF4011BT的O4为低电平,触发红外发光二极管发送信号。
当HEF4024BT的O3为0时,HEF4011BT的O4为高电平,关闭发光二极管,这段时间为4个方波周期。
也就实现了38k载波调制的红外。
接收头是红外线一体化接收头是集红外接收、放大、滤波和比较器输出的模块。
红外避障传感器介绍(反射型)日期:2006-5-16 14:05:14 来源: 点击: 1572 添加到收藏夹
实图:
技术指标:
主体外形尺寸:23×15.3×15.1mm(长×宽×高)
重量:7g
额定电压:直流电源5.0V
检测范围(反射面为白色木板):1~ 40cm(挡板为白色时检测距离在40cm时达到临界点,超过此数值后检测效果变差)
调节方式:多圈电阻式调节,逆时针方向旋转功率变小,顺时针方向旋转功率变大
返回值:有信号(高电平)返回值为“1”,无信号(低电平)返回值为“0”
状态指示方式:检测到信号指示灯亮红灯,无信号不亮
安装方式:单颗Ø3螺丝安装
线长:17.4cm±0.2cm(有效距离)
连接方式:单条3芯排线,2510型3脚插头
有效角度:30 左右
原理与功能
红外避障传感器(以下简称红外)。
红外具有一对红外信号发射与接收二极管,发射管发射一定频率的红外信号,接收管接收这种频率的红外信号,当红外的检测方向遇到障碍物(反射面)时,红外信号反射回来被接收管接
应用介绍:
红外是通过发射端发射红外信号,接收端接收由障碍物反射回来的红外信号,来判断是否有障碍物。
项目应用
红外避障传感器在很多项目中都有使用。
在初中灭火、高中搜救项目中,机器人可以通过红外避障传感器走迷宫;
在轨迹项目中,机器人可以通过黑、白色对红外线的反射和吸收值不同而用红外避障传感器来识别黑色的轨迹线。
注意事项:
1、红外是数字传感器,红外接收管只有在接收到一定强度的红外信号时才会有数值的变化。
障碍物(反射面)太小时,红外会检测不到;障碍物(反射面)颜色为黑色或深色时,会被吸收大部分的红外信号,而只反射回一小部分,导致红外接收管接收到的红外信号强度不够,不足以产生有障碍物(反射面)的信号。
2、红外在暖光源的照射下(如白炽灯、太阳光)检测受到很大影响,它会受到所有相近红外信号的干扰,白炽灯和太阳光中含有红外信号成分较多,对红外的影响也较大。
红外相互之间也存在干扰,因而在使用时需要注意。
3、红外采用的是发射、接收原理,不同反射面对红外信号的吸收与散射,将影响其检测范围,根据测试红色的反射面效果最佳,白色其次,黑色最差;同时反射面的粗糙度和平整度也会影响检测的效果。
4、另外要注意的一点就是大家千万不要把接收管外的黑色塑料皮割掉,如果没有这层黑色塑料皮,它将会一直受到发射管发射出的红外线的干扰,
就会出现一直检测到障碍的情况。
利用红外线的物理性质来进行测量的传感器。
红外线又称红外光,它具有反射、折射、散射、干涉、吸收等性质。
任何物质,只要它本身具有一定的温度(高于绝对零度),都能辐射红外线。
红外线传感器测量时不与被测物体直接接触,因而不存在摩擦,并且有灵敏度高,响应快等优点。
红外线传感器包括光学系统、检测元件和转换电路。
光学系统按结构不同可分为透射式和反射式两类。
检测元件按工作原理可分为热敏检测元件和光电检测元件。
热敏元件应用最多的是热敏电阻。
热敏电阻受到红外线辐射时温度升高,电阻发生变化,通过转换电路变成电信号输出
传感器是一种能把物理量或化学量转变成便于利用的电信号的器件,红外传感器就是其中的一种。