红外避障传感器使用说明
- 格式:pdf
- 大小:216.23 KB
- 文档页数:2


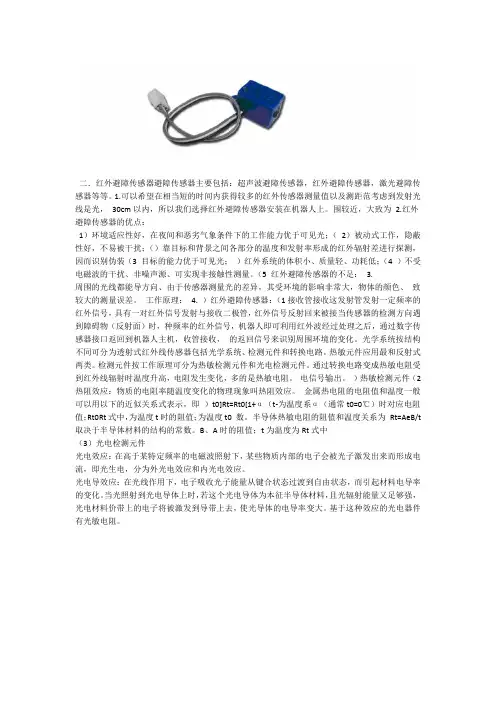
红外避障传感器介绍(反射型)日期:2006-5-16 14:05:14 来源: 点击: 1572 添加到收藏夹实图:技术指标:主体外形尺寸:23×15.3×15.1mm(长×宽×高)重量:7g额定电压:直流电源5.0V检测范围(反射面为白色木板):1~ 40cm(挡板为白色时检测距离在40cm时达到临界点,超过此数值后检测效果变差)调节方式:多圈电阻式调节,逆时针方向旋转功率变小,顺时针方向旋转功率变大返回值:有信号(高电平)返回值为“1”,无信号(低电平)返回值为“0”状态指示方式:检测到信号指示灯亮红灯,无信号不亮安装方式:单颗Ø3螺丝安装线长:17.4cm±0.2cm(有效距离)连接方式:单条3芯排线,2510型3脚插头有效角度:30 左右原理与功能红外避障传感器(以下简称红外)。
红外具有一对红外信号发射与接收二极管,发射管发射一定频率的红外信号,接收管接收这种频率的红外信号,当红外的检测方向遇到障碍物(反射面)时,红外信号反射回来被接收管接应用介绍:红外是通过发射端发射红外信号,接收端接收由障碍物反射回来的红外信号,来判断是否有障碍物。
项目应用红外避障传感器在很多项目中都有使用。
在初中灭火、高中搜救项目中,机器人可以通过红外避障传感器走迷宫;在轨迹项目中,机器人可以通过黑、白色对红外线的反射和吸收值不同而用红外避障传感器来识别黑色的轨迹线。
注意事项:1、红外是数字传感器,红外接收管只有在接收到一定强度的红外信号时才会有数值的变化。
障碍物(反射面)太小时,红外会检测不到;障碍物(反射面)颜色为黑色或深色时,会被吸收大部分的红外信号,而只反射回一小部分,导致红外接收管接收到的红外信号强度不够,不足以产生有障碍物(反射面)的信号。
2、红外在暖光源的照射下(如白炽灯、太阳光)检测受到很大影响,它会受到所有相近红外信号的干扰,白炽灯和太阳光中含有红外信号成分较多,对红外的影响也较大。
二.红外避障传感器避障传感器主要包括:超声波避障传感器,红外避障传感器,激光避障传感器等等。
1.可以希望在相当短的时间内获得较多的红外传感器测量值以及测距范考虑到发射光线是光,30cm以内,所以我们选择红外避障传感器安装在机器人上。
围较近,大致为 2.红外避障传感器的优点:1)环境适应性好,在夜间和恶劣气象条件下的工作能力优于可见光;(2)被动式工作,隐蔽性好,不易被干扰;()靠目标和背景之间各部分的温度和发射率形成的红外辐射差进行探测,因而识别伪装(3 目标的能力优于可见光;)红外系统的体积小、质量轻、功耗低;(4 )不受电磁波的干扰、非噪声源、可实现非接触性测量。
(5 红外避障传感器的不足: 3.周围的光线都能导方向、由于传感器测量光的差异,其受环境的影响非常大,物体的颜色、致较大的测量误差。
工作原理: 4. )红外避障传感器:(1接收管接收这发射管发射一定频率的红外信号,具有一对红外信号发射与接收二极管,红外信号反射回来被接当传感器的检测方向遇到障碍物(反射面)时,种频率的红外信号,机器人即可利用红外波经过处理之后,通过数字传感器接口返回到机器人主机,收管接收,的返回信号来识别周围环境的变化。
光学系统按结构不同可分为透射式红外线传感器包括光学系统、检测元件和转换电路。
热敏元件应用最和反射式两类。
检测元件按工作原理可分为热敏检测元件和光电检测元件。
通过转换电路变成热敏电阻受到红外线辐射时温度升高,电阻发生变化,多的是热敏电阻。
电信号输出。
)热敏检测元件(2 热阻效应:物质的电阻率随温度变化的物理现象叫热阻效应。
金属热电阻的电阻值和温度一般可以用以下的近似关系式表示,即)t0]Rt=Rt0[1+α(t-为温度系α(通常t0=0℃)时对应电阻值;Rt0Rt式中,为温度t时的阻值;为温度t0 数。
半导体热敏电阻的阻值和温度关系为Rt=AeB/t 取决于半导体材料的结构的常数。
B、A时的阻值;t为温度为Rt式中(3)光电检测元件光电效应:在高于某特定频率的电磁波照射下,某些物质内部的电子会被光子激发出来而形成电流,即光生电,分为外光电效应和内光电效应。
红外传感器的使用方法红外传感器可是个超有趣又实用的小玩意儿呢!咱先来说说红外传感器是啥。
简单讲,它就像一个小眼睛,能感觉到红外线。
红外线是啥?就是那种我们看不见,但是它就在周围存在的光线啦。
那怎么开始用它呢?一般来说,你得先给它找个合适的地方安家。
比如说,如果你想用它来做个小安防装置,像检测有没有人偷偷进你的小房间,那就把它安装在门口或者窗户旁边。
要注意哦,这个地方得平稳,可不能让它老是晃悠,不然它会晕头转向,就不好好工作啦。
安装好之后呢,就是连接啦。
这就像给它接上小辫子,让它能跟其他设备说话。
如果是连接到简单的小电路上,那得按照说明书上的指示,小心地把线接对。
要是接错了,它可能就会闹小脾气,不工作或者乱工作呢。
接下来就是设置啦。
很多红外传感器都能调整灵敏度的。
这就好比你调整小宠物的敏感度一样。
如果灵敏度调得太高,可能一只小苍蝇飞过它都会大惊小怪;要是调得太低呢,可能有人在它面前跳舞它都没反应。
所以要根据实际的需求来调整哦。
比如说,你只是想检测大一点的东西,像人或者大宠物,那就不用调得太灵敏。
在使用过程中,也要注意保持它的清洁呢。
就像你要经常给小宠物洗澡一样。
如果它的感应部分脏脏的,上面落了好多灰尘,那它的小眼睛就被遮住啦,可能就不能很好地感觉到红外线了。
还有哦,如果它和其他设备一起工作,像和小警报器连在一起。
你得时不时地检查一下它们之间的配合是不是还那么默契。
有时候设备用久了,可能就会出现小故障,就像两个人相处久了偶尔也会闹别扭一样。
红外传感器其实不难用啦,只要你像对待小宠物一样细心又耐心地对待它,它就能很好地为你工作,帮你实现好多有趣的小想法,比如做个自动感应小夜灯之类的,是不是超酷呢?。

红外线传感器使用方法嘿,朋友们!今天咱就来唠唠红外线传感器这玩意儿的使用方法。
你说这红外线传感器啊,就像是我们的小侦探,能帮我们感知到好多我们肉眼看不到的东西呢!它能探测到物体发出的红外线,这可神奇啦!比如说,你想在晚上知道有没有人偷偷靠近你的家门,红外线传感器就能派上大用场啦!把它安装在合适的位置,它就会像个警惕的小卫士一样,时刻帮你留意着周围的动静。
那怎么用它呢?首先啊,你得选个好地方安装它。
就像你把宝贝藏在一个安全又容易发现情况的角落一样。
可别随随便便找个地儿就装上了,那可不行!得考虑到它能不能探测到关键的区域。
然后呢,要给它接上电,让它有足够的能量工作呀。
这就好比人得吃饱饭才有劲儿干活,对吧?它没了电可就啥都干不了啦。
安装好了,接好电了,这时候你就得好好调试一下啦。
就像你新买了个电视,得调调频道啥的,让它能最准确地感知到红外线。
你可别嫌麻烦,这可是很重要的一步哦!要是没调好,它可能会误报或者干脆不工作呢。
你想想看,要是大半夜的它突然乱叫,把你吓得够呛,结果啥事儿都没有,那多尴尬呀!或者该报警的时候它没反应,那不是糟糕啦?在使用的过程中,你还得时不时地检查检查它,看看它是不是还好好地工作着呢。
就像你得时不时关心关心你的好朋友一样,看看它有没有啥问题。
要是它出了问题,你可得赶紧修好它呀!不然等你真正需要它的时候,它却掉链子,那可就悲剧啦!红外线传感器在好多地方都能大显身手呢!比如在一些自动门那里,它能感应到有人靠近就自动打开门,多方便呀!还有在一些智能家居系统里,它能让你的家变得更智能,更舒适。
总之呢,红外线传感器这玩意儿真的挺好用的,只要你用对了方法,它就能给你带来很多便利和安全呢!咱可别小看了它,好好利用它,让它为我们的生活增添一份保障吧!怎么样,是不是觉得挺有意思的?赶紧去试试吧!。
红外避障原理一、引言红外避障技术是一种常见的传感技术,可用于机器人、智能家居等领域。
它利用红外线传感器来检测前方是否有障碍物,并通过控制电路使机器人或设备避开障碍物。
本文将介绍红外避障技术的原理及其应用。
二、红外线传感器1. 红外线概述红外线是指波长在0.75-1000微米之间的电磁波,与可见光波长相比较长,无法被肉眼直接观察到。
在工业和科学领域中,常使用红外线来检测物体的温度、识别物体等。
2. 红外线传感器原理红外线传感器是一种可以检测周围环境中是否存在物体的设备。
它通过发射出一定频率的红外光束,当这些光束照射到物体表面时,会被反射回来。
传感器接收到这些反射光束后,会将其转换为电信号,并通过处理电路进行分析和处理。
3. 红外线传感器分类根据不同的工作原理和应用场景,红外线传感器可以分为以下几类:(1)红外接近传感器:用于检测物体与传感器之间的距离,一般应用于机器人、智能家居等场景中。
(2)红外避障传感器:用于检测前方是否有障碍物,以实现避障功能。
(3)红外温度传感器:用于检测物体的温度,广泛应用于工业领域中。
三、红外避障原理1. 红外避障技术概述红外避障技术是一种利用红外线传感器来检测前方是否有障碍物,并通过控制电路使机器人或设备避开障碍物的技术。
它主要由发射模块和接收模块组成,发射模块发射出一定频率的红外光束,当这些光束照射到前方时,如果有物体挡住了光束,则会反射回来并被接收模块接收到。
接收模块将接收到的信号转换为电信号,并通过处理电路进行分析和处理。
根据处理结果,控制电路会对机器人或设备进行相应的控制,实现避开障碍物的功能。
2. 红外避障技术原理红外避障技术主要依靠红外线传感器来实现。
当发射模块发射出一定频率的红外光束时,如果没有物体挡住,则光束会一直向前传播,直到被接收模块接收到。
但是,如果有物体挡住了光束,则光束会被反射回来,并被接收模块接收到。
接收模块将接收到的信号转换为电信号,并通过处理电路进行分析和处理。

红外避障传感器使用说明书型号WT_IROA 本红外避障传感器,只有使用说明,没有设计的原理图。
本红外避障传感器,可以检测到前方3-35CM 范围的障碍物。
额定工作电压为5V,电路板上设计有电源工作指示灯。
当检测到障碍物时,输出低电平。
电路板尺寸:22.8mm*26.4mm。
引脚说明及调试方式如下图:调节频率调节距离使能跳线帽1 2 3 45VGND OUT EN调节频率电位器,可以调节发射管的发射红外线的频率,红外解码一般采用38KHZ 的脉冲,如果多只红外避障传感器一起使用时,也可以利这个电位器,调节不同的发射频率以减少传感器之间相互干扰。
出厂时,已经调节好。
调节距离电位器,用于调节发射的功率,向右旋转发射功率变大,反之变小。
发射功率越大,检测的距离越远,但如果太大,可能会引起接收头一直接收到红外的脉冲,会造成红外避障检测失败,注意适量调节,使用者可以在红外发射中套上黑色的热缩管,以减少红外光线泄露,同时可以使用红外光线有一定的方向性。
至于热缩管的长度,使用者可以自行试验以获得最佳的效果。
引脚说明,从左到右分别为:5V,GND,OUT,EN。
其中OUT 为传感器的输出引脚,当前方有障碍物时,输出低电平,同时电路板上也有对应LED 变亮。
EN 引脚为控制传感器的使能引脚,低电平有效。
同时为了方便三线制的传感器,本电路板上设计了一个可以直接跳线使能的。
使用跳线帽即可。
经过本让的测试,本传感器,工作在4.5V-5.5V 下,工作都可以常地检测到障碍物。
使用时,注意电源的极性不要接反,否则会损坏芯片。
请欣赏此传感器,在智能小车上的应用图。
12。
红外避障传感器原理一、红外避障传感器原理红外避障传感器是一种非接触式无损伤传感器,能够检测物体的位置和运动方向,最常用的是发射红外线和接收红外线来实现运动物体的避障。
红外避障传感器包括发射器和接收器,发射器发射出一束红外线,照射到要检测的物体,当物体处在红外线照射范围内,发射器能接收到红外线,这时接收器将发出报警信号提醒运动物体,从而避免发生安全事故。
红外避障传感器可以检测物体的位置和移动方向,在自动化装置的设计中得到了广泛应用,如机器人的避障,自动门的开启,智能家居的安全报警系统等,具有检测距离远,无损伤、不受环境影响、安全可靠等优点。
二、红外避障传感器结构红外避障传感器结构主要包括红外发射模块、红外接收模块和控制模块。
1、红外发射模块:由LED发射红外线,控制LED发射的红外线照射到物体,当物体处在红外线照射范围内时,红外线就会被反射或吸收。
2、红外接收模块:由探测器接收红外线,探测器是一种特殊的电路,能够探测物体是否处在红外线照射范围内,探测器还可以测量物体的距离,检测物体的运动方向等。
3、控制模块:由控制器控制LED的开启,检测物体的情况,当发现物体处在红外线照射范围内时,控制器会发出报警信号提醒运动物体,从而避免发生安全事故。
三、红外避障传感器应用1、机器人避障:红外避障传感器可以用于机器人的避障,在机器人运动的过程中,可以检测到物体的位置,当发现物体处在红外线照射范围内,控制器会发出报警信号提醒机器人,从而避免发生安全事故。
2、自动门:红外避障传感器也可以用于自动开启门,在门的两侧安装红外避障传感器,当探测到物体出现在红外线照射范围内时,通过控制模块自动开启门,方便人们的出入。
3、智能家居:红外避障传感器还可以用于智能家居的安全报警系统,当发现有人破门入室时,报警器会发出警报,保护家庭安全。
红外避障小车前言---------------------------------------------------随着生产自动化的发展需要,机器人已经越来越广泛地应用到生产自动化上,随着科学技术的发展,机器人的传感器种类也越来越多,其中红外传感器已经成为自动行走和驾驶的重要部件。
红外的典型应用领域为自主式智能导航系统,机器人要实现自动避障功能就必须要感知障碍物,感知障碍物相当给机器人一个视觉功能。
智能避障是基于红外传感系统,采用红外传感器实现前方障碍物检测,并判断障碍物远近。
由于时间和水平有限,我们暂选最基本的避障功能作为此次设计的目标。
本设计通过小车这个载体再结合由AT89S51为核心的控制板可以达到其基本功能,再辅加由漫反射式光电开关组成的避障电路、555组成的转速控制电路、电源电路、差分驱动电路就可以完善整个设计。
目录前言------------------------------------------------------------------------------1目录------------------------------------------------------------------------------2摘要------------------------------------------------------------------------------3功能概述------------------------------------------------------------------------3硬件设计------------------------------------------------------------------------3 避障电路------------------------------------------------------------------------4单片机电路---------------------------------------------------------------------7电机转速控制电路------------------------------------------------------------7电源电路------------------------------------------------------------------------8电机驱动电路---------------------------------------------------------------9主程序设计--------------------------------------------------------------------12小结-----------------------------------------------------------------------------23参考文献-----------------------------------------------------------------------231.【摘要】:本文提出一种智能避障小车的设计方法,利用红外技术检测障碍物信息,采用AT89S51单片机进行实时控制,实现智能避障,智能小车采用后轮驱动,两轮各用一个直流电机控制,避障用的传感器采用红外漫反射式传感器。
传感器模块使用说明壁障传感器模块使用说明壁障一模块描述该传感器模块对环境光线适应能力强,其具有一对红外线发射与接收管,发射管发射出一定频率的红外线,当检测方向遇到障碍物(反射面)时,红外线反射回来被接收管接收,经过比较器电路处理之后,绿色指示灯会亮起,同时信号输出接口输出数字信号(一个低电平信号),可通过电位器旋钮调节检测距离,有效距离范围2~80cm,工作电压为3.3V-5V。
该传感器的探测距离可以通过电位器调节、具有干扰小、便于装配、使用方便等特点,可以广泛应用于机器人避障、避障小车、流水线计数及黑白线循迹等众多场合。
二模块参数说明1当模块检测到前方障碍物信号时,电路板上绿色指示灯点亮电平,同时OUT端口持续输出低电平信号,该模块检测距离2~80cm,检测角度35°,检测距离可以通过电位器进行调节,顺时针调电位器,检测距离增加;逆时针调电位器,检测距离减少。
2、传感器主动红外线反射探测,因此目标的反射率和形状是探测距离的关键。
其中黑色探测距离最小,白色最大;小面积物体距离小,大面积距离大。
3、传感器模块输出端口OUT可直接与单片机IO口连接即可,也可以直接驱动一个5V继电器;连接方式:VCC-VCC;GND-GND;OUT-IO4、比较器采用LM393,工作稳定;5、可采用3-5V直流电源对模块进行供电。
当电源接通时,红色电源指示灯点亮;6、具有3mm的螺丝孔,便于固定、安装;7、电路板尺寸:3.1CM*1.5CM8、每个模块在发货已经将阈值比较电压通过电位器调节好,非特殊情况,请勿随意调节电位器。
模块接口说明(33线制)三模块接口说明(1VCC外接3.3V-5V电压(可以直接与5v单片机和3.3v单片机相连)2GND外接GND3OUT小板数字量输出接口(0和1)。
-25°C~+55°C45mA 55mA65mA65mA450m 650m900m1100m40m 60m 80m 100m 180°(±90°)20°(±10°)Removable type Ultrasonic structureReceiving light Indicate 、OK Indicate 、Testing Terminal PC front cover; ABS Back Cover Contact Output 1b DC 30V 0.05A max 2 beams Intercepted simultaneously 2 beamsModelAlarm Distance Max reaching distance Beams NO.Detecting Way Light Source Response Time Alarm Output Supply VoltageSupply CurrentOperation Temperature Range Tamper OutputOptic axis adjust angle (Horizontal)Optic axis adjust angle (Vertical)SightStrategy to dew/frost Other additional functions MaterialWeightIR LED 50~700msFORM C(NO/NC changeable), Contact ratings DC 30V 0.5A max.DC10.5~28V(non-polarity)Recommend supply Voltage DC 12V or 24V(non-polarity)Around 600g ( Transmitter and Receiver )171mm×82mm×77mmDimensions (H×W×D)DS-PI-D40 DS-PI-D60 DS-PI-D80 DS-PI-D100 DS-PI-D40DS-PI-D60DS-PI-D80DS-PI-D100DUAL BEAM PHOTOELECTRIC DETECTORINSTRUCTION MANUALDS-PI-D40 40m 1.2m DS-PI-D60 60m 1.8m DS-PI-D80 80m 2.4m DS-PI-D100 100m 3.0mDS-PI-D40 DS-PI-D60DS-PI-D80/DS-PI-D100双光束主动红外对射使用说明书安装上的注意事项1安装上的注意事项2安装方法部件名称光轴调整遮光时间的调整动作确认异常时的检查外形尺寸图技术参数故障现象可能原因维修对策投光器指示灯不亮电源电压不合适检查电源和连线受光器指示灯不亮电源电压不合适检查电源和连线光线被遮断时报警指示灯不亮① 来自于投光器的红外光束被另一个物体反射进入受光器② 两个光束没有同时被遮断③ 遮断时间小于遮断控制设额定的时间① 移开反射物体或者改变安装位置和光轴方向② 检查两个光束被同时遮断。
简介:E18-D80NK-N是E18-D80NK的升级版。
改动部分主要是内部电路板和外部连线。
传感器外部接线,在末端增加了杜邦头,方便用户使用。
E18-D80NK-N这是一种集发射与接收于一体的光电传感器,发射光经过调制后发出,接收头对反射光进行解调输出。
有效的避免了可见光的干扰。
透镜的使用,也使得这款传感器最远可以检测80厘米距离的问题(由于红外光的特性,不同颜色的物体,能探测的最大距离也有不同;白色物体最远,黑色物体最近)。
检测障碍物的距离可以根据要求通过尾部的电位器旋钮进行调节。
该传感器具有探测距离远、受可见光干扰小、价格便宜、易于装配、使用方便等特点,可以广泛应用于机器人避障、流水线计件等众多场合。
电气特性:z红色:VCC;黑色:GND;黄色:OUT。
z工作电压:5VDCz工作电流:10-15mAz驱动电流:100mAz感应距离:3-80CMz Sensing range: 3-80cmz Sensing object: Translucency, opaque z Supply voltage: DC5Vz Output operation: Normally open(O)z Output: DC three-wire system(NPN)机械特性:z颜色:橙黄色z直径:18mmz长度:45mmz引线长度:20cm,带杜邦头 备注:请不要将引线接错,否则将会烧掉传感器传感器内部原理图z Diameter: 18mm, Length: 45mmz Appearance: Threaded cylindricalz Material: Plasticz Guard mode: Reverse polarity protectionz Ambient temperature: -25-70℃应用案例:1、生产线货物自动计数设备2、多功能提醒器3、走迷宫机器人注意事项:在接线的时候,请避免出现电源和地接错的现象,该操作有可能造成传感器永久性损坏;信号输出端请加上拉电阻;为保护动作的可靠和寿命长,请避免有关规定以外的温度外界(户外)条件下,接近传感器虽为耐水结 构,若装上罩使用,勿使水和水容性切削油等淋到,则可更好地提高可靠性及寿命。
红外测距传感器的工作原理及使用Last updated on the afternoon of January 3, 2021光电检测技术与应用论文题目:红外测距传感器的工作原理及使用院系:机电工程学院班级:测控xxxx完成日期:2017/5/6小组:第x组小组成员:xxxxxxxxxx红外测距传感器的工作原理及使用摘要:利用光的反射性质,将光学系统与电路系统相结合可以制作避障传感器,通过单片机的控制,可以完成智能车在运行过程中,对障碍物的处理。
避障传感器基本原理:利用物体的反射性质。
在一定范围内,如果没有障碍物,发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失。
如果有障碍物,红外线遇到障碍物,被反射到达传感器接收头。
传感器检测到这一信号,就可以确认正前方有障碍物,并送给单片机,单片机进行一系列的处理分析,协调车轮或者舵机工作,完成躲避障碍物的动作。
关键字:光电检测技术、智能车、测距、红外测距传感器、单片机一、引言光电检测作为光学与电子学相结合而产生的一门新兴检测技术,主要包括光信息获取、光电变换、光信息测量以及测量信息的智能化处理等,具有精度高、速度快、距离远、容量大、非接触、寿命长、易于自动化和智能化等优点,在国民经济各行业中得到了迅猛的发展和广泛的应用,如光扫描、光跟踪测量,光纤测量,激光测量,红外测量,图像测量,微光、弱光测量等,是当前最主要和最具有潜力的光电信息技术。
二、光电检测技术的概念光电检测技术是光学与电子学相结合而产生的一门新兴检测技术。
它主要利用电子技术对光学信号进行检测,并进一步传递、储存、控制、计算和显示。
光电检测技术从原理上讲可以检测一切能够影响光量和光特性的非电量。
它可通过光学系统把待检测的非电量信息变换成为便于接受的光学信息,然后用光电探测器件将光学信息量变换成电量,并进一步经过电路放大、处理,以达到电信号输出的目的。
然后采用电子学、信息论、计算机及物理学等方法分析噪声产生的原因和规律,以便于进行相应的电路改进,更好地研究被噪声淹没的微弱有用信号的特点与相关性,从而了解非电量的状态。
产品使用说明书产品名称:红外避障模块 版本:模块描述该传感器模块对环境光线适应能力强,其具有一对红外线发射与接收管,发射管发射出一定频率的红外线,当检测方向遇到障碍物(反射面)时,红外线反射回来被接收管接收,经过比较器电路处理之后,绿色指示灯会亮起,同时信号输出接口输出数字信号(一个低电平信号),可通过电位器旋钮调节检测距离,有效距离范围2~30cm,工作电压为3.3V-5V。
该传感器的探测距离可以通过电位器调节、具有干扰小、便于装配、使用方便等特点,可以广泛应用于机器人避障、避障小车、流水线计数及黑白线循迹等众多场合。
模块参数说明1 当模块检测到前方障碍物信号时,电路板上绿色指示灯点亮电平,同时OUT 端口持续输出低电平信号,该模块检测距离2~30cm,检测角度35°,检测距离可以通过电位器进行调节,顺时针调电位器,检测距离增加;逆时针调电位器,检测距离减少。
2、传感器主动红外线反射探测,因此目标的反射率和形状是探测距离的关键。
其中黑色探测距离最小,白色最大;小面积物体距离小,大面积距离大。
3、传感器模块输出端口OUT可直接与单片机IO口连接即可,也可以直接驱动一个5V继电器;连接方式:VCC-VCC;GND-GND;OUT-IO4、比较器采用LM393,工作稳定;5、可采用3-5V直流电源对模块进行供电。
当电源接通时,红色电源指示灯点亮;6、具有3mm的螺丝孔,便于固定、安装;7、电路板尺寸:3.2CM*1.4CM8、每个模块在发货已经将阈值比较电压通过电位器调节好,非特殊情况,请勿随意调节电位器。
模块接口说明1 VCC 外接3.3V-5V电压(可以直接与5v单片机和3.3v单片机相连)2 GND 外接GND3 OUT 小板数字量输出接口(0和1)。
用户使用手册版本历史时间版本备注2008年6月V1.0初版2009年12月V2.0修改模块引脚定义2019年10月V3.0修正产品尺寸,增加红外模组性能图表2019年10月V3.1增加产品尺寸公差使用注意事项1.在没有认真阅读本说明之前,请勿给模块加电!错误接线将导致模块永久性损坏或烧毁微控制器。
2.请认真查看引脚功能说明,正确接线!请勿将电源反接,否则将导致模块永久性损坏。
3.请勿使用超出额定电压的电源!保证电源的稳定,如果出现高压脉冲,可能会导致微控制器永久性损坏。
4.本产品无防水防潮功能,请在干燥环境下保存或使用!不可将重物堆积在上面。
概述机器人在家里到处走动,如果走到楼梯或有台阶的地方,它如何判断呢?为了体现机器人的智能化,那么我们就要为它安装相应的传感器,防止它继续前进而掉下摔坏。
为此我们就根据这个问题专为机器人设计了一款防跌落传感器,该传感器采用夏普公司的距离传感器,有效测距10cm,开关量输出。
合理的安装传感器就可以准确的检测出台阶,从而让机器人考虑是否该绕道而行。
防跌落传感器还能当作近距离避障传感器使用。
性能指标●工作电源:+2.7~6.2V●工作电流:<10mA●工作温度范围:0℃~+70℃●三线制接口:信号输出(D)、电源正(5V)、电源地(GND)●检测距离:2-10cm,低电平;<2cm或>10cm,高电平●开关量输出:高电平=VCC-0.6V,低电平=0.6V●模块尺寸:36.0×10.0×15.0mm●模块重量:约5g引脚定义1.D:TTL电平输出(高电平=VCC-0.6V,低电平=0.6V)2.5V:电源输入+5V3.GND:电源地典型应用防跌落传感器一般安装在轮子前方机器人的外沿,安装高度为离地面小于10cm为宜,具体可根据实际情况调整,以此实现探测地面的不平度或楼梯而调整机器人前进方向,实现防跌落功能。
连线图样例代码void setup(){Serial.begin(115200);}void loop(){Serial.print("Digital Signal:");Serial.println(digitalRead(3),BIN);delay(50);}红外距离测量特性电原理图尺寸图图中所有单位:mm(模组总高:15.0+1.0mm)联系方式上海智位机器人股份有限公司地址:上海市浦东新区博云路2号浦软大厦6层602及603室E-mail:*******************QQ:800054559。
红外避障传感器使用说明书
型号WT_IROA 本红外避障传感器,只有使用说明,没有设计的原理图。
本红外避障传感器,可以检测到前方3-35CM 范围的障碍物。
额定工作电压
为5V,电路板上设计有电源工作指示灯。
当检测到障碍物时,输出低电平。
电路板尺寸:22.8mm*26.4mm。
引脚说明及调试方式如下图:
调节频率调节距离
使能跳线帽
1 2 3 4
5VGND OUT EN
调节频率电位器,可以调节发射管的发射红外线的频率,红外解码一般采用38KHZ 的脉冲,如果多只红外避障传感器一起使用时,也可以利这个电位器,调节不同的发射频率以减少传感器之间相互干扰。
出厂时,已经调节好。
调节距离电位器,用于调节发射的功率,向右旋转发射功率变大,反之变小。
发射功率越大,检测的距离越远,但如果太大,可能会引起接收头一直接收到红外的脉冲,会造成红外避障检测失败,注意适量调节,使用者可以在红外发射中套上黑色的热缩管,以减少红外光线泄露,同时可以使用红外光线有一定的方向性。
至于热缩管的长度,使用者可以自行试验以获得最佳的效果。
引脚说明,从左到右分别为:5V,GND,OUT,EN。
其中OUT 为传感器的输出引脚,当前方有障碍物时,输出低电平,同时电路板上也有对应LED 变亮。
EN 引脚为控制传感器的使能引脚,低电平有效。
同时为了方便三线制的传感器,本电路板上设计了一个可以直接跳线使能的。
使用跳线帽即可。
经过本让的测试,本传感器,工作在4.5V-5.5V 下,工作都可以常地检测到
障碍物。
使用时,注意电源的极性不要接反,否则会损坏芯片。
请欣赏此传感器,在智能小车上的应用图。
1
2。