常用机构简介
- 格式:ppt
- 大小:1.91 MB
- 文档页数:6
第4章常用机构4.1 平面连杆机构4.1.1 平面连杆机构的组成我们将机构中所有构件都在一平面或相互平行的平面内运动的机构称为平面机构。
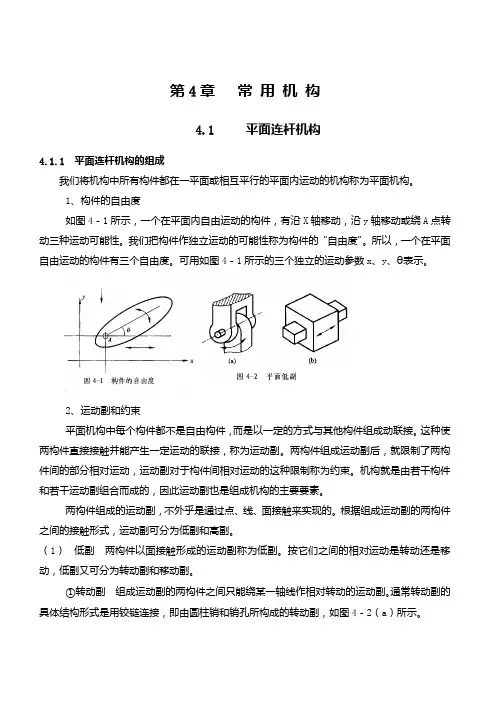
1、构件的自由度如图4-1所示,一个在平面内自由运动的构件,有沿X轴移动,沿y轴移动或绕A点转动三种运动可能性。
我们把构件作独立运动的可能性称为构件的“自由度”。
所以,一个在平面自由运动的构件有三个自由度。
可用如图4-1所示的三个独立的运动参数x、y、θ表示。
2、运动副和约束平面机构中每个构件都不是自由构件,而是以一定的方式与其他构件组成动联接。
这种使两构件直接接触并能产生一定运动的联接,称为运动副。
两构件组成运动副后,就限制了两构件间的部分相对运动,运动副对于构件间相对运动的这种限制称为约束。
机构就是由若干构件和若干运动副组合而成的,因此运动副也是组成机构的主要要素。
两构件组成的运动副,不外乎是通过点、线、面接触来实现的。
根据组成运动副的两构件之间的接触形式,运动副可分为低副和高副。
(1)低副两构件以面接触形成的运动副称为低副。
按它们之间的相对运动是转动还是移动,低副又可分为转动副和移动副。
①转动副组成运动副的两构件之间只能绕某一轴线作相对转动的运动副。
通常转动副的具体结构形式是用铰链连接,即由圆柱销和销孔所构成的转动副,如图4-2(a)所示。
②移动副组成运动副的两构件只能作相对直线移动的运动副,如图4-2(b)所示。
由上述可知,平面机构中的低副引入了两个约束,仅保留了构件的一个自由度。
因转动副和移动副都是面接触,接触面压强低,称为低副。
我们将由若干构件用低副连接组成的机构称为平面连杆机构,也称低副机构。
由于低副是面接触,压强低,磨损量小,而且接触面是圆柱面和平面,制造简便,且易获得较高的制造精度。
此外,这类机构容易实现转动、移动等基本的运动形式及转换,因而是在一般机械和仪器中应用广泛。
平面连杆机构也有其缺点:低副中的间隙不易消除,引起运动误差,且不易精确地实现复杂的运动规律。
机械常见旋转机构
常用旋转机构如下:
1、螺旋式旋转机构:由螺杆、螺母和机架组成通常它是将旋转运动转换为直线运动。
但当导程角大于当量摩擦角时,通常它是将旋转运动转换为直线运动。
特点:能获得很多的减速比和刀的增益;选择合适的螺旋机构导程角,可获得机构的自锁性。
2、凸轮式旋转机构:凸轮机构是由凸轮,从动件和机架三个基本构件组成的高副机构。
凸轮是一个具有曲线轮廓或凹槽的构件,一般为主动件,作等速回转运动或往复直线运动。
凸轮机构广泛地应用于轻工、纺织、食品、交通运输、机械传动等领域。
3、曲柄式旋转机构:曲柄连杆机构(crank train) 发动机的主要运动机构。
其功用是将活塞的往复运动转变为曲轴的旋转运动,同时将作用于活塞上的力转变为曲轴对外输出的转矩,以驱动汽车车轮转动。
曲柄连杆机构由活塞组、连杆组和曲轴、飞轮组等零部件组成。
常用机械机构介绍机械机构是由零部件和连接件组成的系统,用于转换和传递运动和力。
在工程领域,常用的机械机构有各种类型,包括齿轮传动、连杆机构、凸轮机构、蜗杆传动、皮带传动等。
本文将介绍这些常用的机械机构及其特点。
齿轮传动是最常见的机械传动方式之一。
它由两个或多个齿轮组成,通过齿轮的啮合传递运动和力。
齿轮传动可以实现速度和扭矩的变换,广泛应用于各种机械设备中。
齿轮传动有直齿轮传动、斜齿轮传动、锥齿轮传动等不同类型,每种类型都有其特定的应用场景和优势。
连杆机构是由连杆和连接件组成的机械系统,用于转换直线运动和旋转运动。
连杆机构常用于发动机、泵、压缩机等设备中,用于实现活塞的往复运动。
连杆机构的设计和优化对于提高设备的性能和效率具有重要意义。
凸轮机构是一种通过凸轮和摇杆、连杆等连接件实现运动传递的机械系统。
凸轮机构常用于各种自动化设备中,如机床、自动装配线等。
凸轮机构通过凸轮的不规则形状,可以实现复杂的运动轨迹和运动规律,具有很高的灵活性和可控性。
蜗杆传动是一种通过蜗杆和蜗轮实现速度和扭矩变换的机械传动方式。
蜗杆传动具有传动比稳定、噪音小、传动效率高等优点,常用于各种机械设备中,如提升机、输送机等。
皮带传动是一种通过皮带实现运动传递的机械传动方式。
皮带传动具有结构简单、传动平稳等优点,广泛应用于各种轻载、中载的传动系统中,如风扇、空调等。
除了上述介绍的常用机械机构外,还有很多其他类型的机械机构,如齿条传动、滑块机构、滚子传动等。
每种机械机构都有其特定的应用场景和优势,工程师在设计机械系统时需要根据具体的要求和条件选择合适的机械机构。
总的来说,机械机构是机械系统中至关重要的部分,它们通过各种方式实现运动和力的传递,保证设备的正常运转和性能的稳定。
工程师需要深入了解各种机械机构的特点和应用,才能设计出高效、稳定的机械系统。
希望本文能够帮助读者对常用机械机构有更深入的了解。
八种常用机械结构一、简单机构简单机构是机械工程中最基本的机构之一,它由两个或多个刚性零件通过铰链连接而成。
常见的简单机构有杠杆、曲柄连杆机构和齿轮传动机构。
杠杆是一种由固定支点连接的刚性杆件组成的机构,它可以用来放大力量或改变力的方向。
常见的杠杆有一级杠杆、二级杠杆和三级杠杆,它们的力量放大倍数依次递增。
杠杆在物理学中有着广泛的应用,比如撬动重物、刷牙时使用的牙刷等。
曲柄连杆机构是由一个曲柄和一个连杆构成的机构,它可以将旋转运动转换为往复运动。
曲柄连杆机构被广泛应用于内燃机、蒸汽机等发动机中,将活塞的往复运动转换为输出轴的旋转运动。
齿轮传动机构是利用齿轮之间的啮合传递动力和运动的机构。
它有许多种形式,如齿轮副、链轮副等。
齿轮传动机构具有传动效率高、传递功率大、传动稳定等优点,广泛应用于各种机械设备中。
二、滑块机构滑块机构是由滑块和导轨组成的机构,它可以将旋转运动转换为往复运动或直线运动。
滑块机构常用于各种工具和机械设备中,如冲床、拉床等。
滑块机构的运动规律可以通过几何分析和运动学计算来确定,为机械设计提供了重要的理论依据。
三、减速机构减速机构是一种将高速运动转换为低速运动的机构,常用于各种机械设备中。
减速机构的主要作用是减小输出轴的转速,增加输出轴的扭矩。
常见的减速机构有齿轮减速机、带传动减速机等。
齿轮减速机是利用齿轮的啮合传递动力和运动的机构,通过改变齿轮的大小和齿数比例来实现减速。
齿轮减速机具有结构简单、传动效率高、传递功率大等优点,在工业生产中得到广泛应用。
带传动减速机是利用带传动的原理来实现减速的机构,通过改变带轮的直径比例来改变传动比,从而实现减速。
带传动减速机具有传动平稳、噪音小、维护方便等优点,广泛应用于各种机械设备中。
四、连杆机构连杆机构是由连杆和铰链组成的机构,它可以将旋转运动转换为往复运动或直线运动。
连杆机构被广泛应用于各种机械设备中,如汽车发动机、机床等。
连杆机构的运动规律可以通过几何分析和运动学计算来确定,为机械设计提供了重要的理论依据。


机械设计常用机构机械设计是一门综合性的学科,涉及到各种各样的机构和装置。
在机械设计中,机构是非常重要的一部分,它负责传递和转换力、运动和能量,从而实现机械装置的各项功能。
在机械设计中,常用的机构有很多种。
这些机构可以根据其功能、结构和运动特性进行分类和归纳。
下面,我将对一些常用的机构进行介绍。
一、连杆机构连杆机构是机械设计中最基本也是最常用的一种机构。
它由杆件和关节组成,通过杆件的连接和关节的运动,实现力和运动的传递。
连杆机构广泛应用于各种机械装置中,如汽车发动机的连杆机构、拉杆机构等。
二、齿轮机构齿轮机构是一种通过齿轮的相互啮合来传递运动和力的机构。
齿轮机构具有传动比恒定、传递力矩大、传递效率高等特点,广泛应用于各种传动装置中,如汽车变速器、机床传动等。
三、减速机构减速机构主要通过齿轮、皮带等传动元件将输入的高速运动转换为输出的低速运动。
减速机构在机械设计中非常常见,用于满足不同场合的运动速度要求。
四、滑块机构滑块机构是一种通过滑块在导轨上做直线运动来实现运动转换和力传递的机构。
滑块机构广泛应用于各种机械装置中,如工具机的进给机构、压力机的传动机构等。
五、摆线机构摆线机构是一种通过连杆和摆线来实现直线运动的机构。
它通过摆线的特殊形状和连杆的运动,将旋转运动转换为直线运动,广泛应用于各种机械装置中,如剪切机的摆线滑块机构、织机上纬缸的摆线机构等。
六、万向节机构万向节机构是一种通过球面和容器来实现输动与变动传动的机构。
它具有结构简单、运动灵活等优点,广泛应用于汽车、船舶和航空等领域。
以上介绍的只是机械设计中的一小部分常用机构,还有很多其他的机构在实际设计中也扮演着重要的角色。
在进行机械设计时,我们需要根据具体的应用要求和设计目标选择合适的机构,合理地组合和运用这些机构,以实现设计的目的。
总结起来,机械设计中常用的机构有连杆机构、齿轮机构、减速机构、滑块机构、摆线机构和万向节机构等。
这些机构在机械装置中起着重要的作用,通过它们的运动和力传递,实现了各种功能和要求。
常用机构的类型工作原理
机构是由各种零部件组成的,能够将输入的能量、运动或力量转换成所需的输出的装置。
机构的种类繁多,可以按照不同的标准来分类,如结构、用途、工作方式等。
以下是几种常用机构的类型及其工作原理。
1. 齿轮机构
齿轮机构是一种靠齿轮副传递运动和力量的机构。
它由两个或多个齿轮组成,通过齿轮的啮合将输入的能量、运动或力量转换成所需的输出。
常见的齿轮机构有直齿轮、斜齿轮、锥齿轮、蜗杆齿轮等。
2. 曲柄机构
曲柄机构是一种利用连杆、曲柄和轴承等部件组成的机构。
它将旋转运动转换为往复运动。
曲柄机构通常用于内燃机、汽车发动机和机床等领域。
3. 滑块机构
滑块机构是一种利用滑块和导轨等部件组成的机构。
滑块机构可以将旋转运动转换为往复运动,或将往复运动转换为旋转运动。
它常用于冲压机、齿轮机床、摆线针轮减速器等机械装置。
4. 连杆机构
连杆机构是一种利用连杆和轴承等部件组成的机构。
它可以将旋转运动转换为往复运动,或者将往复运动转换为旋转运动。
连杆机构常用于发动机、机床等领域。
5. 减速机构
减速机构是一种将高速旋转转换为低速旋转的机构。
它通常由齿轮、轴承和箱体等部件组成,通过齿轮的啮合将输入的高速旋转转换为低速旋转。
减速机构广泛应用于各种机械设备中,如电动机、风力发电机等。
以上是几种常用机构的类型及其工作原理。
机构的种类繁多,每种机构都有其独特的特点和应用领域。
在实际应用中,需要根据不同的工作需求选择合适的机构。
常用机构的原理及应用常用机构是指在工程领域中广泛应用的一类机械装置,其通过一定的结构组合,能够将运动与力量进行有序的传递和转换。
常用机构的原理和应用涉及到多个学科领域,如机械工程、动力学、材料科学等。
下面将具体介绍几个常用机构的原理及其在实际应用中的具体应用。
1. 曲柄滑块机构曲柄滑块机构是最常见的机构之一,它由曲轴、连杆和滑块组成。
原理是通过曲轴的旋转运动,使得连杆产生直线往复运动。
这种机构广泛应用于内燃机、石油设备等领域,如发动机的曲轴连杆机构实现了汽缸内活塞的往复运动。
2. 齿轮传动机构齿轮传动机构是利用齿轮齿面的传动原理来传递动力和运动的机构。
通过不同齿数的齿轮相互啮合,实现转速和转矩的传递。
齿轮传动机构在机械设备中应用广泛,如汽车的变速器、工业机械的传动装置等。
3. 万向节机构万向节机构是一种能够传递大角度和不连续转动的机构。
它由两个十字交叉的万向节和两个连接杆组成,主要用于传递转动轴的不同转动方向。
应用于汽车转向系统、机械手等领域,实现了灵活的转动和控制。
4. 摆线传动机构摆线传动机构是一种利用摆线齿轮的啮合来传递运动和力量的机构。
它具有连续平稳的运动特点,广泛应用于钟表、缝纫机以及高精度机床等领域。
5. 套索机构套索机构利用钢丝绳或带子的弯曲弹性来传递运动和力量。
它具有结构简单、传动平稳等特点。
套索机构广泛应用于起重机械、电梯等大型设备中,实现了重物的升降和运输。
6. 锁紧机构锁紧机构是一种能够实现连接件的可靠锁紧和松开的机构。
它主要应用于机械设备的组装和分解过程中,保证连接件的可靠性和安全性。
这些常用机构在工程实践中具有广泛的应用。
例如,在汽车行业中,曲柄滑块机构用于内燃机的工作过程,齿轮传动机构用于变速器的转动传动,套索机构用于汽车升降设备的操作等。
在航天工程中,常用机构被用于卫星的稳定控制、载荷的升降等方面。
在机械制造领域,常用机构是实现各种机械设备运动和力量传递的核心部件。
常用的运动转动机构1、连杆机构
2、凸轮机构
3、摩擦传动机构(磨擦轴传动速比约1:2~1:4)
4、齿轮转动机构
5、带链转动机构(V型皮带传动速比可达到1:7,滚子链条在5m/s以下,所用的链轮通常必须在17齿以上,链轮所包含的角度以120度以上较佳)
机械运动1
将旋转运动变成摇摆运动机构
将旋转运动变成直线运动机构
将直线运动变成旋转运动机构
间歇旋转运动机构
间歇往复运动机构
机械运动2变速机构
逆转机构
减速机构
急回机构
变向机构
利用皮带的传动机构
机械运动3倍力机构
间歇进给机构
擒纵机构(间歇少量进给)
凸轮及其应用
联轴节
离合器
制动机构
直线运动机构
平行运动机构
循环轨迹运动机构
可变角速度比传动机构
进给机构。