全站仪竖盘指标差的计算公式
- 格式:docx
- 大小:3.45 KB
- 文档页数:2
关于全站仪2C的问题2C的问题,恐怕要从源头说起,大家知道,视准轴不垂直于横轴便产生视准误差2C,它对读数的影响是:盘右方向值:A=R-ΔC盘左方向值:A=L+ΔC而ΔC=C/COSαΔC--视准轴误差影响,C为视准误差。
从上式可以看出,ΔC随垂直角α的增大而增大,高等级控制测量中,理论上假定α≈0°,此时ΔC≈C,则L-R=2C,这就是2C的概念。
但实际工作中,控制点间的高差可能比较大,即同一测站照准各方向的垂直角α之差相差较大,因而各方向的2C本身就相差大。
所以规范规定,当照准方向的垂直角超过±3°时,该方向的2C变化按同一观测时段内的相邻测回单独比较,因此,我认为2C的绝对值的大小人为无法完全控制。
我们知道,2C对水平角的影响可以通过正倒镜观测消除,也就是说2C绝对值的大小不影响观测结果的精度。
但规范和一般文献的解释是“2C的绝对值过大时给计算盘左、盘右的平均值带来不便”,所以规定J2经纬仪的2C绝对值不大于30”,J1经纬仪的2C绝对值不大于20”。
这样的解释显然有点勉强,况且一般的测角仪器通过了三轴鉴定和校正,在仪器鉴定条件下,2C的绝对值是能够控制的,事实上也有标准。
说了这么多,我的结论是:2C的绝对值大小,规范虽然有要求,不存在楼主说的“经纬仪(全站仪)的2C本身到底应该小于多少时,才可以使用的问题”,只要仪器经过三轴校正并鉴定合格,测量过程中,按规范严格控制2C互差范围,就可以使用。
另:竖盘指标差的绝对值一般不超过25″。
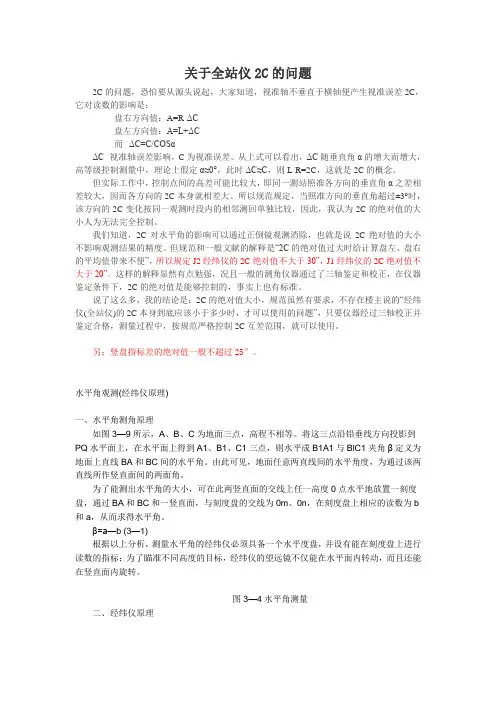
水平角观测(经纬仪原理)一、水平角测角原理如图3—9所示,A、B、C为地面三点,高程不相等。
将这三点沿铅垂线方向投影到PQ水平面上,在水平面上得到A1、B1、C1三点,则水平成B1A1与BlC1夹角β定义为地面上直线BA和BC间的水平角。
由此可见,地面任意两直线间的水平角度,为通过该两直线所作竖直面间的两面角。
为了能测出水平角的大小,可在此两竖直面的交线上任一高度0点水平地放置一刻度盘,通过BA和BC和一竖直面,与刻度盘的交线为0m、0n,在刻度盘上相应的读数为b 和a,从而求得水平角。
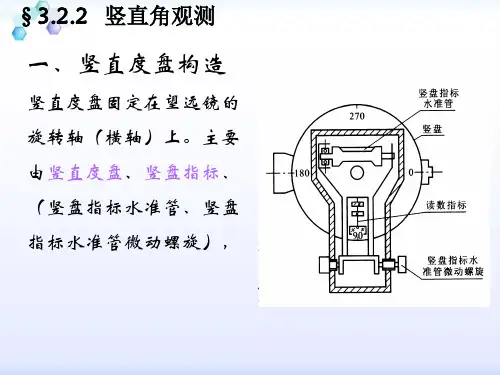
竖盘指标差
由于指标线偏移,当视线水平时,竖盘读数不是恰好等于90°或270°上,而是与90°或270°相差一个角,这个角称为竖盘指标差,
即 i 角。
对于指标差的计算公式,根据竖直角天顶、竖直角水平的情况而有所不同。
若竖直角天顶为 0°,则 i=(L+R-360°)/2 ;
若竖直角水平为 0°,则 i=(L+R-180°)/2 或(L+R—540°)/2。
若|i|≥10″,就需要进行校正,让其符合要求,以智能全站仪为例,其具体步骤如下:
1、第一步,盘左精确照准与仪器同高的远处任一清晰稳定目标 A ,
点击确定。
2、第二步,盘右精确照准同一目标 A,重置可返回第一步重新进行盘左照准。
3、盘左,盘右都完成测量后,将显示指标差,点击确定,则完成校正。
4、重复检验步骤重新测定指标差( i 角),使其符合要求。
1。
垂直角指标差计算公式
垂直角指标差是在测量领域中常用的一个概念,用于计算两个方向之间的差异或偏移程度。
这个指标可以帮助我们更准确地描述和分析不同方向上的数据,以便更好地理解问题和做出相应的决策。
在实际应用中,垂直角指标差可以用于测量不同方向上的数据偏离程度,比如在地质勘探中用于确定地层的倾向和倾角;在建筑设计中用于确定建筑物的朝向和高度等。
通过计算不同方向上的角度差,可以更准确地描述和分析数据,为相关领域的研究和应用提供重要参考。
垂直角指标差的计算方法比较简单,通常是通过两个方向之间的角度差来表示。
首先需要确定两个方向,然后计算它们之间的角度差,最后得到一个数值表示它们之间的差异程度。
这个数值越大,说明两个方向之间的偏移越大;反之则表示两个方向之间的一致性越高。
在实际应用中,垂直角指标差可以帮助我们更好地理解和分析数据,发现其中的规律和特点。
通过对不同方向上的角度差进行计算和比较,我们可以更准确地把握数据的特点,为解决实际问题提供有力支持。
总的来说,垂直角指标差是一个在测量领域中非常有用的概念,可以帮助我们更准确地描述和分析不同方向上的数据。
通过计算不同方向之间的角度差,我们可以更好地理解数据的特点,为相关领域
的研究和应用提供重要参考。
希望通过本文的介绍,读者能够更好地理解和应用垂直角指标差这一概念。
全站仪转点误差计算公式
全站仪的转点误差是指在测量过程中由于仪器自身的误差所引
起的测量偏差。
转点误差通常由仪器的仪器常数误差和水平角误差
组成。
计算转点误差的公式如下:
转点误差 = 仪器常数误差 + 水平角误差。
其中,仪器常数误差是指全站仪在测量时由于仪器本身的制造
和装配误差引起的误差,通常由制造厂家提供。
水平角误差是指在
测量过程中由于水平轴的不垂直或者水平轴的不水平所引起的误差。
为了更准确地计算转点误差,我们可以使用以下公式:
转点误差 = 仪器常数误差+ √(水平轴不垂直误差^2 + 水平
轴不水平误差^2)。
在实际测量中,我们需要对全站仪进行校准,以减小转点误差
的影响。
校准的方法包括水平轴的调整和仪器常数的修正等。
除了上述公式外,还可以根据具体的全站仪型号和测量条件进
行误差计算,因为不同的全站仪可能存在不同的误差来源和修正方法。
在实际测量中,我们还需要考虑环境因素、测量方法等多个因素对误差的影响,以确保测量结果的准确性和可靠性。
总之,全站仪的转点误差计算涉及到仪器常数误差和水平角误差,通过合适的公式和校准方法可以准确计算和修正转点误差,从而提高测量的准确性和可靠性。
测绘地理信息数据获取与处理(中级)试题与参考答案一、单选题(共100题,每题1分,共100分)1.下面的说法正确的是()A、系统误差可以通过多次测量消除B、偶然误差一定能完全消除C、系统误差是可以减少甚至消除的正确答案:C答案解析:系统误差具有明显的规律性和累积性,对测量结果的影响很大。
但是由于系统误差的大小和符号有一定的规律,所以可以采取措施加以消除或减少其影响。
偶然误差处理的基本方法是概率统计方法,可以通过多次测量减小,不能完全消除。
2.等高距是两相邻等高线之间的()。
A、高程之差B、平距C、间距D、垂距正确答案:A答案解析:地形图上相邻等高线之间的高差称为等高距,也叫做等高线间距(隔),用h表示。
3.地貌接边应()A、道路不发扭曲B、等高线无断裂C、不产生变形D、剧名地不产生变形正确答案:C答案解析:地貌接边应不产生变形,选C4.RTK平面控制点测量移动站观测每次观测历元数至少应A、大于20个B、小于5个C、小于10个D、大于30个正确答案:A答案解析:参考控制点测量标准5.下列选项属于导线测量等级划分的是()A、一级导线、二级导线和图根导线B、附合导线、闭合导线和支导线C、一级导线、闭合导线和其他导线正确答案:A答案解析:导线测量等级分为一级导线、二级导线和图根导线,故选A6.以下哪一项不是GNSS系统中产生误差的来源( );A、潮汐效应B、温室效应C、相对论效应D、地球自转正确答案:B答案解析:温室效应不是产生GNSS系统误差的来源;其它都是7.一晴朗夏日,某二等水准组在北京地区观测,测段进行一半时,已经接近上午十点。
此时,观测组应()A、继续观测B、打伞观测C、打间歇D、到下一个水准点结束观测正确答案:C答案解析:根据要求,太阳中天前后2各2小时不应观测8.下列不属于测量误差的来源是()。
A、仪器本身误差B、管理方法误差C、外界自然条件影响正确答案:B答案解析:测量误差主要来自以下四个方面: 1、外界条件主要指观测环境中气温、气压、空气湿度和清晰度、风力以及大气折光等因素的不断变化,导致测量结果中带有误差。
测绘地理信息数据获取与处理(中级)模拟考试题+参考答案一、单选题(共100题,每题1分,共100分)1、高差闭合差的分配原则为()成正比例进行分配。
A、与测站数B、与高差的大小C、与距离或测站数D、与距离正确答案:C答案解析:高差闭合差调整的原则是将闭合差反其符号后,按(测站数)成比例分配,平原按距离分配,丘陵按测站数分配。
2、产生视差的原因是( )。
A、仪器校正不完善B、物像有十字丝面未重合C、十字丝分划板位置不正确D、目镜调焦不正确正确答案:B答案解析:当眼睛在目镜端上下微微移动时,若发现十字丝与目标影像有相对运动,这种现象称为视差。
3、等高线平距是指相邻两等高线之间的A、高差B、水平距离C、倾斜距离D、以上都不是正确答案:B答案解析:等高线平距是指相邻两等高线之间的水平距离4、展绘控制点时,应在图上标明控制点的A、点号与坐标B、点号与高程C、坐标与高程D、高程与方向正确答案:B答案解析:参考控制点测量标准5、下列检验项目中,全站仪观测水平角时需要进行检验的是()A、加常数检验B、指标差检验C、横轴误差检验正确答案:C答案解析:加常数影响测距精度。
指标差影响垂直角测量的精度。
横轴误差影响水平角测量的精度,故选C。
6、下列地形图上表示的要素中,属于地物的是()A、丘陵B、山地C、河流正确答案:C答案解析:丘陵、山地是地形,不属于地物。
河流属于地物。
7、连续采集一组地形碎部点数据超过多少,应重新进行初始化,并检核一个重合点A、20点B、30点C、40点D、50点正确答案:D答案解析:参考碎部测量标准8、在一个测站上同时有6个以上方向需要观测时,则水平角的观测应采用()A、方向观测法B、分组方向观测法C、全组合测角法正确答案:B答案解析:在一个测站上同时有6个以上方向需要观测时就需用到分组方向观测法9、凡被权属界线所封闭的地块称为A、单位B、宗地C、街坊D、街道正确答案:B答案解析:宗地是指土地权属界址线封闭的地块或空间。
国开(中央电大)专科《建筑测量》网上形考(作业一至四)试题及答案说明:适用于电大道路桥梁工程施工与管理,建筑施工与管理专科学员网上形考;同时,资料也是期末机考必备资料。
形考作业一试题及答案一、填空题1.测量工作的基本原则是程序上“由整体到局部”;步骤上“先控制后碎部”;精度上“从高级到低级”。
2.方位角是自某标准方向起始,顺时针至一条直线的水平角,以过直线起点的平面坐标纵轴平行线指北端为标准方向的方位角为坐标方位角。
坐标方位角范围0o~360o。
象限角取值范围为0o~90o,为了说明直线所在的象限,在角值前应加注直线所在象限的名称。
3.高程是指地面点沿铅垂线到一定基准面的距离。
测量中定义以大地水准面作基准面的高程为绝对高程,以其它任意水准面作基准面的高程为相对高程。
地面任意两点之间的高程之差称为高差。
无论采用绝对高程还是相对高程,两点间的高差总是不变的。
如果h AB为正时,表明B点高于A点。
4.水准测量的基本原理是利用水准仪提供的水平视线测定地面两点之间的高差,推算未知点高程一种方法。
5.水准仪的粗略整平是指旋转脚螺旋使圆水准气泡居中;水准仪的精确整平是指旋转微倾螺旋,使水准管气泡居中。
6.水准测量的水准路线分为附合水准路线、闭合水准路线、支水准路线。
7.使用微倾式水准仪的操作步骤是:粗略整平、瞄准标尺、精确整平、标尺读数。
二、名词解释和简答题1.地面点的平面位置如何确定?测量上的直角坐标系有哪些?他们是如何定义的?答:地面点的平面位置可用二维球面或平面坐标确定。
测量上的直角坐标系有:高斯平面直角坐标系,独立平面直角坐标系。
高斯投影是一种横轴椭圆柱投影,即设想用一个椭圆柱套住地球椭球体,使椭圆柱的中轴横向通过椭球体的中心,将椭球面上的点位和图形投影到椭圆柱的面上,然后将椭圆柱沿通过南、北极的母线展开成平面,即得到高斯投影平面,在此平面上,椭球体和椭圆柱相切的一条子午线和赤道的投影为两条相互正交的直线,即构成高斯平面直角坐标系。
全站仪竖盘指标差的计算公式
全站仪是一种用于测量地面点之间水平和竖直方向距离的仪器。
它由仪器本体、测距仪、自动水平仪和垂直仪等部分组成。
全站仪竖盘指标差是指全站仪在测量过程中,竖盘读数之间的差异。
竖盘指标差的计算公式如下:
竖盘指标差= Σ(观测值 - 平均值) / n
其中,Σ表示求和,观测值是每次测量得到的竖盘读数,平均值是观测值的平均数,n是观测次数。
通过计算竖盘指标差,可以评估全站仪测量结果的稳定性和准确性。
全站仪竖盘指标差的计算方法是先进行多次竖盘读数,然后求出这些竖盘读数的平均值,再将每次测量得到的竖盘读数减去平均值,最后将所有差值相加并除以观测次数,得到竖盘指标差。
竖盘指标差的计算结果可以用来评估全站仪的测量精度。
如果竖盘指标差较小,说明全站仪的测量结果较为稳定,测量精度较高;反之,如果竖盘指标差较大,说明全站仪的测量结果不够稳定,测量精度较低。
在实际的测量工作中,为了提高测量精度,可以采取一些措施。
首先,应选择合适的观测点,避免地形起伏、障碍物等因素对测量结果的影响。
其次,应保持全站仪的稳定性,避免外部干扰对测量结
果的干扰。
此外,还可以增加观测次数,提高竖盘指标差的计算精度。
全站仪竖盘指标差是评估全站仪测量精度的重要指标。
通过计算竖盘指标差,可以了解全站仪测量结果的稳定性和准确性。
在实际的测量工作中,应注意选择合适的观测点、保持全站仪的稳定性,并增加观测次数,以提高测量精度。
仪器的2C值(视准轴不垂直于横轴,在水平方向观测同一点时会产生一个C值,且盘左=盘右,符号相反)
操作方法:先用盘左、照准目标、水平制动
(VR竖直角度控制在0°-10°之间)
水平角置零,HR显示为0°0′0″,松开水平制动,转动180°,用盘右照准目标,理想角度HR显示180°0′0″,一般很难达到。
之间差为2C值
2C=(&左-&右)±180°
全站仪指标差也称i角误差(视准线与横轴不在90°或270°平面上)
指标差=
操作方法:用望远镜分别在正镜和倒镜位置瞄准(垂直角控制在±10°左右的平行光管分划板或远处目标
THANKS !!!
致力为企业和个人提供合同协议,策划案计划书,学习课件等等
打造全网一站式需求
欢迎您的下载,资料仅供参考。
经纬仪全站仪水准仪误差分析和校准Leica SUR John Shao一、误差分类1、仪器构造误差1)视准轴误差的影响,盘左盘右观测的平均值可抵消该误差。
2)横轴不水平误差的影响,盘左盘右观测的平均值可抵消该误差。
3)纵轴误差的影响(1) 纵轴误差的影响不仅随观测目标的垂直角的增大而增大,而且与横轴所处的方向有关;(2) 盘左盘右取平均不能消除该项误差。
4)照准部偏心差的影响在度盘对径方向上读取读数而取平均值的方法及盘左、盘右读数的平均值都可消除该项误差的影响。
5)其他仪器误差的影响 度盘刻划不均匀误差,竖盘指标差。
2、与观测者有关的误差1)仪器对中误差2)目标偏心误差3)照准误差4)读数误差3、与外界条件有关的误差1)温度的变化2)大风的影响3)大气折光4)大气透明度5)地面稳定性二、经纬仪误差分析:有六项主要误差,即:(1)安平水准器轴垂直于竖轴误差;(2)十字丝竖丝与铅垂线平行误差;(3)视准轴垂直于横轴误差;(4)横轴垂直于竖轴误差——i角误差;(5)竖盘指标差误差;(6)2C误差。
(7)光学对中器的检校(8)圆水准器的检校(次 要)前六项主要误差校正,是在不存在度盘偏心差前提下进行的、否则需先校正度盘偏心差。
(1)如何校正安平水准器轴垂直于仪器竖轴误差检验:初步整平仪器,转动照准部使水准管平行于一对脚螺旋连线,转动这对脚螺旋使气泡严格居中;然后将照准部旋转180˚,如果气泡仍居中,则说明条件满足,如果气泡中点偏离水准管零点超过一格,则需要校正。
校正:先转动脚螺旋,使气泡返回偏移值的一半,再用校正针拨动水准管校正螺钉,使水准管气泡居中。
如此反复检校,直至水准管旋转至任何位置时水准管气泡偏移值都在一格以内。
(2)十字丝竖丝与铅垂线平行误差检验 :用十字丝交点瞄准一清晰的点状目标P,转动望远镜微动螺旋,使竖丝上、下移动,如果P点始终不离开竖丝,则说明该条件满足,否则需要校正。
十字丝竖丝与铅垂线平行的检验校正:旋下十字丝环护罩,用小螺丝旋具松开十字丝外环的4个固定螺钉,转动十字丝环,使望远镜上、下微动时,P 点始终在竖丝上移动为止,最后旋紧十字丝外环固定螺钉。
各位学员注意:答案部分一定要手写,否则不得分《建筑测量实训》作业1一.填空题1、水准测量的基本原理是利用水准仪提供的水平视线测定地面两点之间的高差,推算未知点高程一种方法。
2、水准仪的粗略整平是指旋转脚螺旋使圆水准气泡居中;水准仪的精确整平是指旋转微倾螺旋,使水准管气泡居中。
3、水准测量的水准路线分为附合水准路、线闭合水准路线、支水准路线。
4、使用微倾式水准仪的操作步骤是:粗略整平、瞄准标尺、精确整平、标尺读数二、问答题1、什么是视差?它是怎样产生的?如何消除?答:所谓“视差”,是当眼睛在目镜端上、下微动时,看到十字丝与目标的影像相互移动的现象。
其产生的原因是目标的实象未能刚好成在十字丝平面上。
视差的存在会增大标尺读数的误差,消除的方法是再旋转物镜对光螺旋,重复对光,直到眼睛上、下微动时标尺的影像不再移动为止。
2、水准测量为什么要求前后视距相等?答:前后视距相等可消除角误差、地球曲率和大气折光的误差。
3、水准测量外业中有哪些测站检核和计算检核?答:测站检核的方法有:1) 变仪高法。
2) 双面尺法。
计算检核:所有测站的后视读数之和与前视读数之和的差值等于测站高差之和,即:[h]=[a]-[b]4、水准仪主要轴线之间应满足的几何条件是什么?各起什么作用?水准仪的主要轴线有望远镜视准轴、水准管轴、圆水准轴,此外还有仪器的竖轴。
它们之间应满足以下几何条件:1 ) 圆水准轴平行于仪器的竖轴,即//;2 ) 十字丝横丝垂直于竖轴,即十字丝横丝;3 ) 水准管轴平行于视准轴,即//。
满足L′L′∥VV,使圆水准气泡居中时,竖轴基本铅直,视准轴粗平。
使十字丝横丝垂直于竖轴。
当竖轴铅直时,横丝处于水平,横丝上任何位置读数均相同。
满足条件LL∥CC,使水准管气泡居中时,视准轴处于水平位置。
三、计算题如图2所示附合水准路线,已知A、B两点的高程、各测段的测站数及观测高差。
试计算及调整其高差闭合差,并求各待定点的高程。
垂直度盘指标差对垂直角观测精度影响的探讨作者:鲁勇奇孙小鹏来源:《西部论丛》2019年第09期摘要:本文主要介绍了垂直度盘指标差在垂直角实际观测中对其观测值的影响。
关键词:垂直角指标差度盘1 引言在实际的测量中,由于仪器搬运或安装过程的震动等原因,当视线水平、水准器气泡居中时,垂直度盘读数不是应该正确的起始读数,它与正确起始读数之间存在着指标差。
我们常用指标差的大小来检查观测数据质量。
并且,在垂直角测量中,对于指标差的大小和指标互查都有明确的规范[1]要求,那么指标差的大小变化对其观测值精度的影响究竟有多大,下面本文将对垂直角指标差对其观测值的影响进行分析探讨。
2 垂直角及垂直度盘指标差2.1 垂直角测量原理(1)垂直角的概念在用以鉛垂面内,观测视线与水平线之间的夹角,称为垂直角,用α表示。
其角值范围为0°到±90°。
如图2-1所示,视线在水平线的上方,垂直角为仰角,符号为正(α);视线在水平线的下方,垂直角为俯角,符号位负(-α)[2]。
图2-1 垂直角测量原理(2)垂直角的观测原理用水平角一样,垂直角的角值也在度盘上两个方向的读数之差。
望远镜瞄准目标的视线与水平线分别在竖直度盘上有对应读数,两读数之差即为垂直角角值。
所不同的是垂直角的两个方向中的一个方向是水平方向。
无论对哪一种仪器来说,视线水平时的竖盘读数都应为90°的倍数。
所以测量垂直角时,只要瞄准目标读数竖盘读数,即可计算出垂直角[2]。
2.2 垂直度盘指标差(1)垂直度盘指标差的概念[3]垂直度盘指标差是指垂直度盘读数指标的实际位置与正确位置之差。
当指标水准气泡剧中时,指标线偏离正确位置的角度值称为“指标差”。
由于指标与指标水准器、度盘与视准轴等相关位置的安装和调整不完善而引起。
(2)垂直度盘指标差的计算[3]垂直角计算公式都认为视线水平时,其读数是90°的整倍数。
当实际情况这个条件是不满足的。
全站仪竖盘指标差的计算公式
全站仪是一种测量仪器,常用于测量建筑物、道路等工程项目的水平和垂直方向。
在使用全站仪进行测量时,竖盘指标差是一个重要的评估指标。
本文将介绍竖盘指标差的计算公式,并解释其意义和应用。
竖盘指标差是全站仪测量垂直方向时的一个误差指标,用于评估测量结果的准确性。
它反映了测量仪器在垂直方向上的误差大小。
竖盘指标差越小,说明测量结果越准确。
竖盘指标差的计算公式如下:
竖盘指标差 = 竖盘读数 - 真实值
其中,竖盘读数是全站仪测量得到的垂直方向的读数,真实值是实际测量点的准确垂直位置。
竖盘指标差的计算方法是将测量读数与真实值进行比较,得到两者之间的差值。
这个差值可以为正数或负数,正数表示竖盘读数高于真实值,负数表示竖盘读数低于真实值。
竖盘指标差的计算公式是全站仪测量准确性评估的重要工具。
通过计算竖盘指标差,可以了解测量结果的误差情况。
如果竖盘指标差较大,说明测量结果存在较大的误差,需要进行修正或重新测量。
如果竖盘指标差较小,则说明测量结果较为准确,可以用于工程设
计和施工。
竖盘指标差的计算公式是全站仪测量中的基本知识,但在实际应用中需要注意几点:
要确保竖盘读数和真实值具有相同的单位。
例如,竖盘读数可能是以度为单位的角度值,而真实值可能是以米为单位的长度值。
在进行计算之前,需要将它们转换为相同的单位。
竖盘指标差的计算结果只是一个相对值,不能单独用于评估测量结果的准确性。
为了获得更准确的测量结果,还需要考虑其他误差来源,如仪器本身的精度、观测环境的影响等。
竖盘指标差的计算公式只能用于评估竖直方向的误差,对于水平方向的误差需要使用其他指标进行评估。
因此,在进行全站仪测量时,需要综合考虑水平和垂直方向的误差,以确保测量结果的准确性。
竖盘指标差是全站仪测量中的一个重要评估指标,用于评估垂直方向上的测量误差。
它的计算公式简单明了,可以帮助工程人员了解测量结果的准确性。
然而,在实际应用中,需要综合考虑其他因素,以获得更准确的测量结果。
只有准确的测量结果才能为工程设计和施工提供可靠的依据。