全站仪指标差和2C值
- 格式:docx
- 大小:7.86 KB
- 文档页数:1
关于全站仪2C的问题2C的问题,恐怕要从源头说起,大家知道,视准轴不垂直于横轴便产生视准误差2C,它对读数的影响是:盘右方向值:A=R-ΔC盘左方向值:A=L+ΔC而ΔC=C/COSαΔC--视准轴误差影响,C为视准误差。
从上式可以看出,ΔC随垂直角α的增大而增大,高等级控制测量中,理论上假定α≈0°,此时ΔC≈C,则L-R=2C,这就是2C的概念。
但实际工作中,控制点间的高差可能比较大,即同一测站照准各方向的垂直角α之差相差较大,因而各方向的2C本身就相差大。
所以规范规定,当照准方向的垂直角超过±3°时,该方向的2C变化按同一观测时段内的相邻测回单独比较,因此,我认为2C的绝对值的大小人为无法完全控制。
我们知道,2C对水平角的影响可以通过正倒镜观测消除,也就是说2C绝对值的大小不影响观测结果的精度。
但规范和一般文献的解释是“2C的绝对值过大时给计算盘左、盘右的平均值带来不便”,所以规定J2经纬仪的2C绝对值不大于30”,J1经纬仪的2C绝对值不大于20”。
这样的解释显然有点勉强,况且一般的测角仪器通过了三轴鉴定和校正,在仪器鉴定条件下,2C的绝对值是能够控制的,事实上也有标准。
说了这么多,我的结论是:2C的绝对值大小,规范虽然有要求,不存在楼主说的“经纬仪(全站仪)的2C本身到底应该小于多少时,才可以使用的问题”,只要仪器经过三轴校正并鉴定合格,测量过程中,按规范严格控制2C互差范围,就可以使用。
另:竖盘指标差的绝对值一般不超过25″。
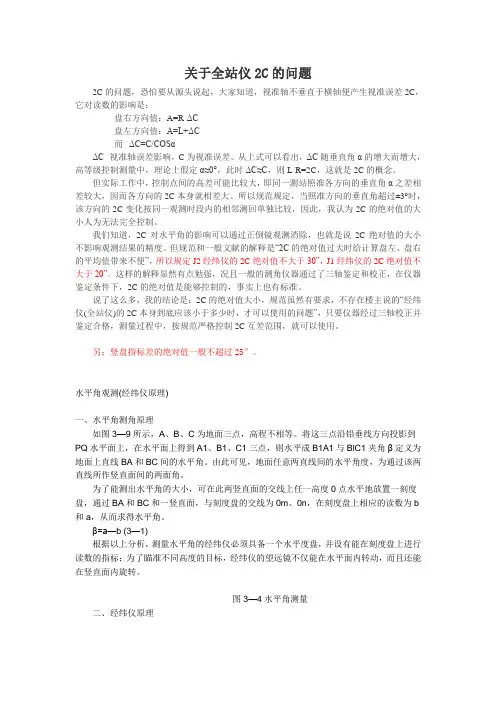
水平角观测(经纬仪原理)一、水平角测角原理如图3—9所示,A、B、C为地面三点,高程不相等。
将这三点沿铅垂线方向投影到PQ水平面上,在水平面上得到A1、B1、C1三点,则水平成B1A1与BlC1夹角β定义为地面上直线BA和BC间的水平角。
由此可见,地面任意两直线间的水平角度,为通过该两直线所作竖直面间的两面角。
为了能测出水平角的大小,可在此两竖直面的交线上任一高度0点水平地放置一刻度盘,通过BA和BC和一竖直面,与刻度盘的交线为0m、0n,在刻度盘上相应的读数为b 和a,从而求得水平角。
2011年1月第1期(总148)铁 道 工 程 学 报J OURNAL OF RA IL W AY ENG I N EER ING SOC I ETYJan 2011NO.1(Ser .148)收稿日期:2010-07-24作者简介:张绪丰,1985年出生,男,在读硕士研究生。
文章编号:1006-2106(2011)01-0015-052C 互差对CP 平面网精度影响的仿真计算与分析张绪丰1刘成龙1陈 澍1郑子天2(1.西南交通大学, 成都610031; 2.中铁二院工程集团有限责任公司, 成都610031)摘要:研究目的:在满足CP 网点间相对点位精度要求的前提下,在CP III 网实测数据添加符合正态分布的随机误差,以此来模拟2C 互差值,同时采用边角网间接平差的严密精度估算方法,探究2C 互差对CP 平面网主要精度的影响。
研究结论:根据无碴轨道CP 平面网外业观测的方法和特点以及测量现状,通过添加符合正态分布随机误差的方法,模拟2C 互差值,并采用某客专的部分数据进行了仿真计算。
通过对结果的分析,证明了2C 互差对CP 平面网的主要精度有一定的影响,然而,在起算数据精度较好和投影变形较小的前提下,通过本文的研究认为可以适度放宽2C 互差的限差至15 ,这时CP 平面网的主要精度指标仍能满足规范的要求,这样的话放宽2C 互差的限差指标可提高CP 平面网的测量效率,也为高速铁路工程测量规范的修订与完善提供基础资料。
关键词:2C 互差;正态分布随机误差;CP 平面网;相邻点位相对精度中图分类号:U 212.24 文献标识码:ASi m ulati ng Calculati on and Analysis of t he I mpact of 2CM ut ualDeviati on onAccuracy of CP Plane Net workZHANG Xu -feng 1,LIU Cheng -long 1,CHEN Shu 1,ZHENG Zi -tian 2(1.Southw est Jiao tong Un i v ersity ,Chengdu ,S ichuan 610031,China ;2Ch i n a R ail w ay Eryuan Eng ineeri n g Group Co .Ltd ,Chengdu ,S ichuan 610031,China)Abst ract :R esearch purposes :The rando m error wh ich confor m ed to the nor m al d istr i b ution w as appended to the observed date o f CPIII net w ork to si m u late the 2C m utua l dev i a ti o n under the pre m ise o f m eeting the requ ire m ent o f re lative po i n t position accuracy of CP ne t w ork ,and also the tight and precise esti m ation m ethod for calcu lati o n of the i n direct ad j u st m ent ofm arg i n net w ork w as used for exp lori n g the i m pact o f 2C mutual dev iation on the accuracy o f CPIII plane net w or k.R esearch concl u sions :The va l u e of 2C m utua l deviati o n w as si m ulated by add i n g the rando m error confo r m ed to the nor m a l distri b u ti o n ,and the si m u lation calcu lation o f the partia l date of one passenger dedicated li n e w as m ade ,acco r d i n g to the fie l d observati o n m ethod and features as w e ll as m easure m ent situati o n of ballastless track CPIII p l a ne net w or k.The ana l y si resu lt sho w ed t h e 2C m utua l deviati o n has certain i m pact on the accuracy o fCPIII plane net w ork .But under the pre m ise o f hav ing good i n itial calc u lation data and little pro jecti o n distorti o n ,the m ain m easure m ent prec isions o f CPIII p lane net w o r k could m eet the specificati o n requ ire m ent by w iden i n g the 2C mutual dev iation to 15seconds .Such w i d ening the 2C m utual dev iation cou l d enhance t h e m easure m ent efficiency o f CPIII p lane net w or k and prov i d e he funda m enta l data for the rev isi o n and i m pr ove m ent o f the eng i n eering sur vey specification for h i g h-speedra il w ay .K ey w ords :2C mu t u a l dev iation ;nor m al d istri b uti o n rando m error ;CP plane net w or k;re lati v e precisi o n bet w een ad jacentm easure m ent spots高速铁路无碴轨道要求具有良好的平顺性,CP 控制网是保证这一要求的关键技术。
瑞得全站仪简明操作手册一、参数设置按测量1键持续1秒钟,对合作目标、棱镜常数、测量模式和记录模式进行设置。
按左右键修改设置,最后回车确认.按测量2持续1秒也可进行上述设置,因此可分别设置两种测量模式以适应不同情况.按热键按钮,再按2键,进行温度、气压设置按住背景光设置键1秒钟,可进行背景光,声音,对比度设置二、坐标数据输入与删除按菜单键,再按4(数据),再按2(坐标数据)通过上下键选择坐标点,按测量1键删除该坐标,或按角度键输入新点的N,E,Z坐标、点名PT和编码CD的值。
回车确认后,仪器自动进入下一点坐标输入界面,点名自动累加。
三、测站设置按7键建站按1键输入测站点名,已知坐标,仪高并回车。
按[模式]键可切换数字与字母输入状态.若坐标已存在,可按显示,从坐标列表中直接调取.按1键进行坐标(或角度)后视定向输入后视点点名,坐标和棱镜高并回车。
若坐标已存在,可按显示,从坐标列表中直接调取。
照准后视点按回车完成设置,或按测量键检核后视四、坐标测量测站设置完成后,照准待测目标点棱镜,按测量1开始测量按上下翻页键或显示键查看测量结果五、坐标放样先进行测站设置(方法同三).再进行坐标放样。
按8号放样键,按2坐标放样。
若放样坐标已存在仪器中,可按显示,从坐标列表中直接调取。
否则连续回车,进入放样点坐标输入界面.输入放样点坐标,按回车确认。
界面显示角度差,旋转仪器直至角度差dAZ为零,即为放样点方向将棱镜放在该方向上,照准棱镜中心,按测量1键测量后,显示测量点与放样点差值,不断调整棱镜位置,使各差值为零,则棱镜处即为放样点位置。
六、后方交会按7键建站,再按2(后方交会),按显示键调取第1个已知点坐标数据,或直接回车输入第1个已知点坐标。
回车确认后瞄准第1个已知点棱镜,按测量1键显示测量成果,确认。
同样方法再调用或输入第2个已知点坐标,回车确认后瞄准第2个已知目标,按测量1显示成果,确认。
此时交会点被自动计算,按显示键可翻页查看计算结果.当显示的残差值满足要求时,按记录键把该点设为测站点。
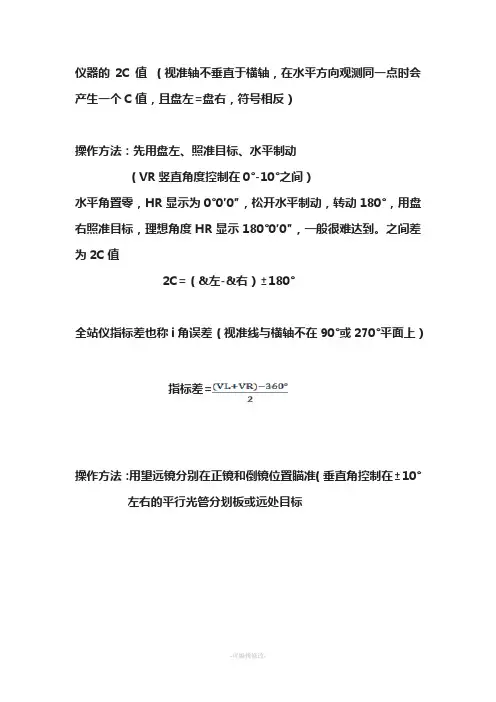
仪器的2C值(视准轴不垂直于横轴,在水平方向观测同一点时会产生一个C值,且盘左=盘右,符号相反)
操作方法:先用盘左、照准目标、水平制动
(VR竖直角度控制在0°-10°之间)
水平角置零,HR显示为0°0′0″,松开水平制动,转动180°,用盘右照准目标,理想角度HR显示180°0′0″,一般很难达到。
之间差为2C值
2C=(&左-&右)±180°
全站仪指标差也称i角误差(视准线与横轴不在90°或270°平面上)
指标差=
操作方法:用望远镜分别在正镜和倒镜位置瞄准(垂直角控制在±10°左右的平行光管分划板或远处目标
THANKS !!!
致力为企业和个人提供合同协议,策划案计划书,学习课件等等
打造全网一站式需求
欢迎您的下载,资料仅供参考。
原创不容易,【关注】店铺,不迷路!牛人经验分享!全站仪导线测量的详细操作方法一目了然!由于一般提供的控制点较远,一般需要在道路工程开工前对控制点进行加密,这将涉及到附合导线测量。
我们将与你分享两篇关于如何做的文章。
阐述了导线测量的野外工作,包括选点、埋石和观测;下一部分说明办公室的调整和坐标计算。
首先,实地选定控制点选址前,必须有计算程序,路线的设计参数经过编辑,知道路线的大致走向。
选点的几个要求:基础稳固,便于架设仪器和后期放线,超出施工挖填范围一定距离,相邻两点能见度好,各点与前后相邻点的距离尽可能长。
要确定导线等级,请参考下面的《导线测量的主要技术参数》。
第二,埋石头在选定的点挖一个坑。
根据土质情况,建议埋深不小于0.6m.将钢筋切成约50厘米长的小块,选择横截面平坦光滑的一端,用钢锯锯成约2mm深的十字丝,备用。
将搅拌好的混凝土倒入坑内,人工夯实,表面平整,在中心插入钢筋,钢筋顶端高出混凝土表面1厘米左右。
在混凝土表面标记点数。
这样的控制点被埋没了。
注意:有些问题不是绝对的。
例如,也可以在坚固稳定的岩石或建筑物上做标记和标记。
总之把握一个原则,控制点要稳定,便于后期保存和使用。
第三,导线测量(角度测量和距离测量)为了方便大家&prime的学习和理解,我将用一个案例来论证。
案例背景G1、G2、G3、G4为设计院给出的坐标已知的控制点,D1、D2、D3为待测的埋地加密点。
连接两个相邻点后,形成一个导线电路图,如下图所示:测量方案从G1点到G4点测量,测得的水平角为左角。
导线等级为一级,测量仪器为二级;全站仪,使用同型号的两个棱镜。
根据技术要求,每个站需要观测两次回波测量。
开始前的一些常识说明线边:两个线点的连线在水平面上的投影称为线边,所以线边的长度就是相邻两点之间的水平距离。
水平角:指相邻两条导线边缘形成的夹角。
左右角:观测推进方向的左角称为左角,右角称为右角,一般测量。
前点和后点:前点和后点由观测点的位置决定,在相对于观测点的观测方向上称为前点,反之亦然。
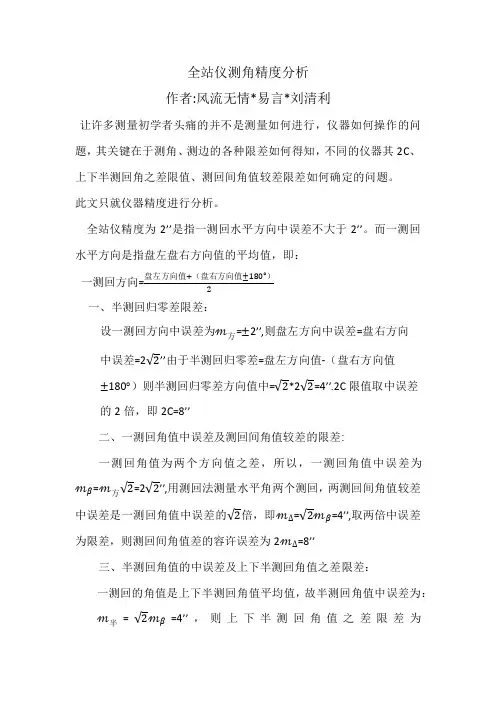
全站仪测角精度分析作者:风流无情*易言*刘清利让许多测量初学者头痛的并不是测量如何进行,仪器如何操作的问题,其关键在于测角、测边的各种限差如何得知,不同的仪器其2C、上下半测回角之差限值、测回间角值较差限差如何确定的问题。
此文只就仪器精度进行分析。
全站仪精度为2’’是指一测回水平方向中误差不大于2’’。
而一测回水平方向是指盘左盘右方向值的平均值,即:一测回方向=盘左方向值+(盘右方向值±180°)2一、半测回归零差限差:设一测回方向中误差为m=±2’’,则盘左方向中误差=盘右方向方中误差=2√2’’由于半测回归零差=盘左方向值-(盘右方向值±180°)则半测回归零差方向值中=√2*2√2=4’’.2C限值取中误差的2倍,即2C=8’’二、一测回角值中误差及测回间角值较差的限差:一测回角值为两个方向值之差,所以,一测回角值中误差为mβ=m√2=2√2’’,用测回法测量水平角两个测回,两测回间角值较差方中误差是一测回角值中误差的√倍,即m∆=√β=4’’,取两倍中误差为限差,则测回间角值差的容许误差为2m∆=8’’三、半测回角值的中误差及上下半测回角值之差限差:一测回的角值是上下半测回角值平均值,故半测回角值中误差为:m=√2mβ=4’’,则上下半测回角值之差限差为半m∆=m半√2=4√2’’=5.6’’,取中误差的2倍为容许误差,故容许误差为11.2’’四、上边一二三部中对应的函数式如下:1.一测回方向=盘左方向值+(盘右方向值±180°)22.2C=盘左方向值-(盘右方向值±180°)3.一测回角值=(一测回方向)后-(一测回方向)前4.测回间角值较差=一测回角值-另一测回角值5.一测回角值=上半测回角值+下半测回角值26.上下半测回角值较差=上半测回角值-下半测回角值五、常用函数中误差公式:。

CPⅡ控制网及二等水准基点加密为满足CPⅢ控制网测量联测的需要,CPⅢ平面网建网前应保证沿线路方向每隔400~800m左右有一个CPⅠ或CPⅡ控制点可供CPⅢ平面网联测,不满足间距条件时应按GPS三等测量的技术要求加密CPⅡ控制点。
CPⅢ高程网建网前为应保证2km线路长度范围内至少有一个稳定可用的线路水准基点,不满足间距条件时应按二等水准测量技术要求加密水准基点。
CPⅢ观测条件要求CPⅢ数据采集时必须高度重视外部观测条件的影响。
CPⅢ观测时,作业现场应无明显震动、灰尘、干扰光源,观测视线无遮挡物及无交叉施工干扰。
CPⅢ观测应选择在阴天或夜间进行,在大风、雨雪天气以及霜冻或水雾较大时均不应进行观测。
CPⅢ网测量CPⅢ标志及埋设CPⅢ点标志CPⅢ点应设置强制对中标志,标志几何尺寸的加工误差应不大于0.05mm,CPⅢ标志棱镜组件安装精度应符合表7.1.1的要求:建议采用统一的CPⅢ棱镜组件。
预埋件、高程测量适配器、棱镜连接适配器统一采用单轴CPIII标志配套Leica GPR121棱镜。
单轴CPⅢ标志组件由预埋件、棱镜测量杆、棱镜连接件三部分组成。
CPⅢ棱镜组件、棱镜样图及规格尺寸如下:图7.1.1.1 预埋件平面图图7.1.1.2预埋件口及金属保护保护盖图7.1.1.3 棱镜测量杆图7.1.1.4 水准测量杆图7.1.1.5 LeicaGPR121进口钢化精密棱镜CPIII标志规格尺寸(单位mm)如下图所示:图7.1.1.6 水准测量杆的标准尺寸图7.1.1.7 棱镜测量杆的标准尺寸图7.1.1.8 棱镜测量杆的标准尺寸标志的检查采用内径和外径千分尺检测,加工误差不得大于0.05mm,达到加工尺寸范围为合格。
将检查结果填写于测量标志检查记录附件9.6所需表格2:测量标志检查记录表。
检查平面(高程)测量连接杆和预埋件外观有是否完好,平面(水准)测量杆全部插入预埋件后预埋件沿口应和平面(水准)测量杆突出横截面是否密接,有无明显晃动等。
全站仪指标差和2C值教学内容全站仪是一种高精度的测量仪器,通常用于建筑、土木工程、道路测量等领域的测量和定位工作。
全站仪的指标差和2C值是评估其测量精度和准确性的重要参考指标。
本文将详细介绍全站仪的指标差和2C值的定义、计算方法以及其在实际测量中的教学内容。
一、全站仪的指标差全站仪的指标差是指在一次测量中,同一个目标点多次测量结果之间的差异。
指标差越小,代表测量的准确性和稳定性越高。
全站仪的指标差通常可分为水平方向的指标差和垂直方向的指标差两部分。
1.水平方向的指标差:水平方向的指标差一般通过测量同一目标点的多个互相独立的水平角度来计算。
测量多组水平角度值后,可以计算出水平方向的平均值和标准差。
标准差越小,水平方向的指标差越小,代表测量的精度越高。
2.垂直方向的指标差:垂直方向的指标差一般通过测量同一目标点的多个互相独立的垂直角度来计算。
与水平方向类似,测量多组垂直角度值后,可以计算出垂直方向的平均值和标准差。
标准差越小,垂直方向的指标差越小,代表测量的精度越高。
二、2C值2C值是全站仪的一个重要评估指标,用于评价全站仪的角度测量误差,即全站仪角度测量的准确度。
2C值可以理解为角度测量中的一种误差限值,代表测量结果与真实值之间的最大误差。
1.计算方法:2C值的计算通常使用统计学中的概念。
首先进行一系列测量,得到多组测量值。
然后计算这组测量数据的平均值和标准差。
2C 值等于平均值加上2倍的标准差。
2C值越小,代表测量的准确度和精度越高。
2.教学内容:在教学中,可以通过实际操作全站仪来教授2C值的计算和评估。
首先,学生需要了解全站仪的角度测量误差的概念,并学习如何进行测量。
然后,可以设计一系列实验,让学生进行多次测量,并记录测量结果。
学生可以根据测量数据计算出平均值和标准差,并进一步计算出2C值。
通过比较不同测量点的2C值,学生可以评估全站仪的角度测量准确性,并加深对2C值的理解。
总结起来,全站仪的指标差和2C值是评估全站仪测量精度和准确度的重要指标。
测量仪器管理办法为加强我公司测量仪器和测量工具的管理,提高测量仪器及工具的使用质量,延长使用寿命,降低维修费用,特制定本管理规定。
第一条各种测量仪器、工具的质量和性能应定期进行检修,严禁超期使用,以保持良好状态,并将送检仪器合格报告单及时报工程中心备案。
第二条测量仪器要建立档案(说明书、出厂合格证、履历书、开箱检查表、年检证等),并及时填写,做到帐、物、型三符合.第三条新购测量设备(全站仪、水准仪)的项目部需书面报测量组审核,再由测量组报公司领导审核批准后由采购部购买。
第四条新购测量设备在验收合格后,应及时将开箱检查表、说明书、履历表、检定证等有关资料寄送工程中心备案.第五条经质检部门鉴定不合格或精度可靠性低、仪器破旧、示值难辩而无法修复的测量设备由项目部报测量组,再由测量组报送公司领导审批后报废.第六条项目全站仪应设专人操作、专人保管,他人不得随意动用,以防损坏或降低精度。
对于人为损坏测量仪器的,仪器修理费将由本人承担,并罚款1000元。
第七条全站仪中的参数(棱镜常数、气压、温度、2C值、指标差、补偿器等)他人不得随意更改.项目测量人员应自设一条平坦(约100米)基线,进行常规性的自检,并有自检记录,水准仪尤其注意i角误差的检查,以确保仪器原有精度。
第八条工作中,仪器不得受太阳暴晒或雨淋,移位时必须将仪器装箱;当仪器安置后,必须有人看护,自始至终不得离开,以防行人、车辆或施工工作人员因不慎而损坏仪器。
更不允许将仪器工具箱当作坐凳或他用。
造成设备损坏的对当事人处设备价值20%的罚款。
第九条仪器的正确使用1、仪器的操作人员必须经过培训,熟悉仪器的构造、性能及各螺旋的部位和作用,观测时绝不能骑跨脚架,不可用手扶压脚架,一切操作均应手轻、心细、动作柔稳。
2、应尽量使三个脚螺旋保持大致等高,旋转要均匀,松紧要适中,决不能过紧,形成拧死状态。
制动与微动螺旋也应松紧适当,不可过松,尤其不可过紧。
3、操作中不许用手触摸物镜、目镜,有灰尘时用软毛刷轻轻掸去,决不可用手指擦试。
、根据交桩情况,结合此段线路所有构造物的特点,对设计院提供的C级和D级控制网进行增设、补设控制点。
2、采用GPS复测C级网,全站仪(Ⅰ级或Ⅱ级测距精度、角度指标差1″或2″)分段符合D 级点,角度观测采用方向观测法(四测回),距离采用往返测(四测回),增补的导线点按照同精度进行附测,在复测前所使用的仪器必须进行检校,其指标差应符合以下规定:(1)、照准部旋转时,各位置气泡读数互差:DJ1型仪器不应超过2格(按两端气泡读数子和比较为4格);DJ2型仪器不应超过1格(按两端气泡读数子和比较为2格)。
(2)、光学测微器行差:DJ1型仪器不应超过1″;DJ2型仪器不应超过2″。
(3)、照准部旋转时,仪器底座位移而产生的系统误差:DJ1型仪器不应超过0.3″;DJ2型仪器不应超过1.0″。
(4)、水平轴不垂直于垂直轴之差的绝对值:DJ1型仪器不应超过10″;DJ2型仪器不应超过15″。
(5)、经纬仪2倍视轴(2C)的绝对值:DJ1型仪器不应超过20″;DJ2型仪器不应超过30″。
(6)、光学对中器旋转180°时,先后标定的两点应重合。
(7)、测尺频率的校正精度应高于1×10-6。
(8)、发射、接受、照准三轴之间应平行和重合。
(9)、周期误差的振幅不应大于仪器标称精度中固定误差的0.6倍,检定中误差不应大于0.5mm。
(10)、加常数的检定中误差不应大于仪器标称精度中固定误差的0.5倍;乘常数的检定中误差不应大于仪器标称精度中比例误差系数的0.75倍。
3、在测量作业时,仪器要轻拿轻放,键盘按钮、制动锁、微调螺旋要柔手操作,仪器搬站必须装箱,作业应符合下列规定:(1)、应检校三周轴的平行性与圆水准器及光学对中器。
(2)、视线宜高于地面和离开障碍物1.3m以上。
(3)、视线应避免通过受电、磁场干扰的地方,一般要求离开高压线2~5m。
(4)、视线宜避免通过发热体(如散热塔、烟囱等)。
(5)、视线背影应避免反光体,在反射光束范围内,不得同时出现两个反射器,测距时步话机应暂停使用。
利用平行光管检验校正台校正全站仪的竖盘指标差及2C值崔家武;周波阳;李锦城【摘要】Index error of vertical circle and 2C value (two times of collimation axis error) are two important indicators which affect the precision of total station's angle measurement.A South NTS-312L total station with index error of vertical circle overrun and a South NTS-312L total station with 2C overrun are corrected by the calibrator stand with collimators.The experiments show that the index error of vertical circle of the former is reduced from 24" to 6" and 2C of the latter from 19" to-6" respectively after calibrating,the calibrating results according with Verification Regulation of Electronic Tachometer Total Station JJG 100-2003.In order to check the calibration results further,both total stations are tested in a field survey,and the results show that the vertical index of the former changes between-3" to 6" range,and 2C value of the latter variesin-6" to 5" range,these numbers basically in agreement with the calibration experiment.%竖盘指标差及2C值(两倍的视准轴误差)是影响全站仪角度测量精度的两个重要因素.利用平行光管检验校正台分别对一台竖盘指标差超标的南方测绘NTS-312L型全站仪和一台2C超标的南方测绘NTS-312L型全站仪进行了校正.校正后,前者的竖盘指标差从24"减小至6",后者的2C从19"减小至-6",校正结果符合《全站型电子速测仪检定规程JJG 100-2003》.为了对校正结果进行进一步检核,分别对两台全站仪进行了外业测试,结果显示,前者的竖盘指标差在-3"到6"范围内,后者的2C值在-6"到5"范围内,与实验结果基本符合.【期刊名称】《广东工业大学学报》【年(卷),期】2017(034)006【总页数】5页(P78-82)【关键词】平行光管检验校正台;全站仪;竖盘指标差;视准轴误差【作者】崔家武;周波阳;李锦城【作者单位】广东工业大学土木与交通工程学院,广东广州510006;广东工业大学土木与交通工程学院,广东广州510006;广东工业大学土木与交通工程学院,广东广州510006【正文语种】中文【中图分类】P202全站仪是集测角、测距功能于一体的测绘仪器,竖盘指标差和视准轴误差是影响测角精度的重要因素[1-2]. 竖盘指标差是指竖盘指标偏离了正确位置,使视线水平时的竖盘读数比90°或270°大了或小了一个数值X,这个偏离值X称为竖盘指标差[3]. 产生竖盘指标差的原因主要有竖轴不铅垂、望远镜视准轴不水平、垂直度盘固定位置不对或松动导致较大偏差等[4-6]. 视准轴误差指的是视准轴与横轴不正交,视准轴与横轴的垂直面形成夹角C[7],如图1所示. 产生视准轴误差的原因主要有望远镜十字丝分划板安置不正确、望远镜调焦透镜运行时晃动、外界温度变化等[8].《全站型电子速测仪检定规程JJG100-2003》[9]给出了不同类型全站仪的竖盘指标差和2C的具体指标,见表1. 该规程规定,J2型仪器的竖盘指标差和2C 均不得超过16″,竖盘指标差和2C超标的全站仪必须进行校正.全站仪竖盘指标差、2C值的校正方法通常有两种:一是将仪器送到专门的检定机构去检定和校准;二是由具有一定经验和技术水平的人员在野外进行现场检校. 前者通常上是一年送检一次,检校精度高,效果好,但较费时费力,还增加了额外的经费支出. 后者则可随时随地对仪器进行校正,但由于在野外进行操作,步骤繁琐,容易受到多种因素的干扰,导致仪器检验的精度及可靠性较低. 广东工业大学测量实验室购置了大地测量仪器检验校正台(为便于表述,后文中均简称为“检校台”),采用检校台校正仪器可以综合上述两种方法的优势,使得检验仪器变得经济、方便、快捷. 由于目前市场大多使用J2型仪器,本文以南方NTS-312L全站仪为例,介绍了利用检校台校正全站仪的竖盘指标差及2C的具体步骤,并对校正的结果进行了检核.广东工业大学测量实验室购置了DP f550-3型大地测量仪器检验校正台,见图2 (a). 在检校台安装完毕后,需对其进行精密整平. 通过旋转仪器脚下4个安平螺旋,将圆水泡调至中间,见图2 (b). 此外,由于受长途运输、震动等因素的影响,检校台的光学系统有可能产生误差. 在使用前,应使用一台高精度的、已确认消除了i角误差的水准仪对其进行校正,具体过程参见检校台的说明书. 为保证检校台的稳定性,该工作需每半年进行一次. 实践证明,该型检校台可对光学水准仪的i角进行校正[10]. 检校台平行光管上有远近两个十字丝,其中远处的十字丝能模拟无穷远处的目标,进而消除人为照准误差.将全站仪安置在检校台上,调节检校台,使得全站仪的视准轴和检校台的平行光管大致在一个水平面上;调节脚螺旋,严格整平全站仪;盘左照准平行光管中无穷远处的十字丝,调节微动螺旋,使得望远镜分划板上的十字丝横丝和平行光管中无穷远处的十字丝横丝重合,读取竖直度盘读数V1;望远镜翻转180°,旋转照准部,以盘右位置重复上述操作,读取竖直度盘读数V2,则可按式(1)得到竖盘指标差X:若X的值超过规程规定的限差,则需要进行校正.视准轴与横轴的正交性检验主要有3种方法,即读数法、四分之一法和高低点法[8]. 由于读数法简便且适用于检校台,所以本文选用读数法对视准轴误差C进行检验. 检验的具体步骤如下:将全站仪安置在检校台上,调节检校台,使得全站仪的视准轴和检校台的平行光管大致在一个水平面上;调节脚螺旋,严格整平全站仪;盘左照准平行光管中无穷远处的十字丝,调节微动螺旋,使得望远镜分划板上的十字丝竖丝和平行光管中无穷远处的十字丝竖丝重合,读取水平度盘读数L;望远镜翻转180°,旋转照准部,以盘右位置重复上述操作,读取水平度盘读数R,则可按式(2)得到2倍的视准轴误差2C:如果2C的绝对值超过规程规定的限差,则需要进行校正.竖盘指标差的校正方法有两种[11]:一是机械校正法,首先打开望远镜筒,可以看到有上下左右4个校正螺钉,如图3所示. 经过调整上下两个螺钉来校正竖盘指标差的大小. 二是程序校正法,全站仪可通过一个简单加减计算来弥补该差异,即竖盘指标差的电子补偿[12-16].由于程序校正法更加便捷高效,所以本文选用程序校正法对竖盘指标差超限的仪器进行校正. 具体步骤如下:(1) 将仪器固定在检校台上并精密整平仪器.(2) 通过菜单进入指标差校正界面. (3) 盘左照准平行光管中的十字丝,使分划板上的十字丝横丝和平行光管中无穷远处的十字丝横丝重合,按“ENT”确认.(4) 盘右照准平行光管中的十字丝,使分划板上的十字丝横丝和平行光管中无穷远处的十字丝横丝重合,按“ENT”确认.当全站仪2C的绝对值超过限差时,不要搬动仪器. 此时全站仪盘右,且望远镜分划板上的十字丝竖丝和平行光管中无穷远处的十字丝竖丝重合. 校正的具体步骤如下:(1) 计算盘右观测的校正值R校=R+C.(2) 小心地拧开望远镜筒,可以看到上下左右4个校正螺钉,如图3所示.(3) 检查水平制动螺旋,严格制动.(4) 利用水平微动螺旋,使得水平度盘的读数为R校. 这时,通过望远镜可以看到,分划板上的十字丝竖丝和平行光管中无穷远处的十字丝竖丝已经不重合.(5) 小心地转动左右两个校正螺钉,通过两个校正螺钉的一松一紧来调整分划板上十字丝在水平方向上的移动(可以略放松上下校正螺钉,使得十字丝能够移动,但不可太松,否则容易引起十字丝的旋转,给校正工作带来困难),使得分划板上的十字丝竖丝和平行光管中无穷远处的十字丝竖丝再次重合.(6) 最后检查水平度盘的读数有没有因为校正工作而发生变动,如果有变动则重复(4)、(5)的操作.如果水平度盘读数仍是R校,则校准工作结束.不同厂家生产的全站仪虽然有差异,但由于其测角原理及内部构造基本一致,文章中视准轴误差、竖盘指标差的检验及校正方法对不同厂家不同型号的全站仪具有普遍适用性.采用检校台对广东工业大学测量实验室的多台全站仪进行检验,发现仪器编号为No 53437的南方NTS-312L全站仪(为表述方便,后文将其简称为No 53437)竖盘指标差X超限,仪器编号为No 45627南方NTS-312L全站仪(为表述方便,后文将其简称为No 45627)2C超限,检验结果如表2和表3所示. 按照本文3.1和3.2中提及的校正步骤分别对这两台仪器进行了校正,校正后对它们的竖盘指标差和2C重新进行了检验,检验结果如表4和表5所示. 从表中的数据可以看到,校正后,No 53437的竖盘指标差从24″减小至6″,No 45627的2C从19″减小至–6″,均达到《全站型电子速测仪检定规程JJG100-2003》的要求.利用校正后的No 53437进行了竖直角观测. 观测时选取了3个不同角度的点进行观测,分别为D、E、F,每个点观测5测回,观测记录如表6所示,从表中可以看出,竖盘指标差最大较差分别为9″、6″、1″,均小于10″;竖直角最大较差分别为5″、7″、9″,均小于10″. 上述二者都满足四等导线竖直角观测的要求[17].采用校正后的No 45627进行了水平角观测,观测时,选取了3个不同的方向,分别为A、B、C,并采用方向观测法进行6测回观测,观测记录如表7所示. 表7说明,一测回内最大半测回归零差分别为2″、3″、5″、1″、2″、2″,均小于8″;一测回内2C最大互差分别为5″、6″、11″、1″、7″、8″,均小于13″;B、C方向各测回最大互差分别为4″、5″,均小于9″;上述二者也达到了四等导线水平角观测的要求.实践证明,利用大地测量仪器检验校正台校正全站仪的竖盘指标差及2C误差具有可行性及可靠性. 利用实验室配置的检校台对仪器进行校正,填补了送修仪器1年的间期,使得仪器出现的各种问题能够及早发现、及时解决,避免损失,提高了仪器的利用率. 同时相较于野外进行校正更简便,精度及可靠性更高. 检校台对测量仪器的维护、保养有着积极意义,建议有条件的测量单位、高校测量实验室配置检校台.【相关文献】[ 1 ]尚云东. 全站仪三轴误差的检验分析[J]. 测绘技术装备,2006, 8(2): 45-46+26.SHANG Y D. Analysis on the check of error of three axes of total station [J]. Geomatics Technology and Equipment,2006, 8(2): 45-46+26.[ 2 ]王菊蕊, 尚云东. 全站仪三轴误差检验探讨[J]. 科学之友(学术版), 2005(5): 15-17.WANG J R, SHANG Y D. Discussions on the check of error of three axes of total station [J]. Friend of Science Amateurs, 2005(5): 15-17.[ 3 ]潘正风, 程效军, 成枢, 等. 数字测图原理与方法[M]. 武汉: 武汉大学出版社, 2009. 120-121. [ 4 ]罗路明. 浅析光学经纬仪竖盘指标差产生的原因及调整[J]. 质量探索, 2016, 3(3): 50-51.LUO L M. Analysis of the causes and adjustment of the optical theodolite’s index error of vertical circle [J].Quality Exploration, 2016, 3(3): 50-51.[ 5 ]肖铂. 光学经纬仪竖盘指标差产生原因分析与调整[J].中州煤炭, 2006(4): 64+91.XIAO B. Adjustment and analysis of the causes of the optical theodolite’s index error of vertical circle [J].Zhongzhou Coal, 2006(4): 64+91.[ 6 ]李婷. 光学经纬仪竖盘指标差的超差原因分析与调整[J].中国计量, 2005(8): 56.LI T. Analyzethe cause and adjustment of the optical theodolite’s index error of vertical circle [J]. China Metrology, 2005(8): 56.[ 7 ]周淑波. 全站仪轴线误差分析与改正计算[J]. 河北工业科技, 2005, 22(6): 58-60+64.ZHOU S B. Analysis and correcting computation of axis line error for the electronic total station observations [J]. Hebei Journal of Industrial Science and Technology, 2005, 22(6):58-60+64.[ 8 ]孙艳崇. 经纬仪视准轴误差检验的几种方法及其区别[J].价值工程, 2014, 33(3): 70-71.SUN Y C. Several inspection methods of theodolite collimation axis error and their differences [J]. Value Engineering,2014, 33(3): 70-71.[ 9 ]全国几何量角度计量技术委员会. 全站型电子速测仪检定规程: JJG 100-2003[S]. 陕西: 中国计量出版社, 2003.[10]周波阳, 李锦城, 黎家州, 等. 采用平行光管检验校正台校正光学水准仪的i角[J]. 广东工业大学学报, 2016,33(2): 15-18+36.ZHOU B Y, LI J C, LI J Z, et al. Calibrating the i-angle of optical level using a calibrator stand with collimators [J].Journal of Guangdong University of Technology, 2016,33(2): 15-18+36.[11]许婵. DJD系列、DT系列电子经纬仪竖盘指标差校正的方法和注意事项[J]. 仪器仪表用户, 2015, 22(2): 39-40.XU C. Method and the matters needing attention of correction about DJD series, DT series electronic theodolite vertical disk indicator error [J]. Instrument Action, 2015, 22(2):39-40.[12]虞积强. 全站仪误差与检验研究[D]. 合肥: 合肥工业大学土木与水利工程学院, 2008.[13]叶晓明, 凌模, 谢方. 全站仪轴系补偿原理及检验方法探讨[J]. 测绘信息与工程, 2003, 28(3): 40-43.YE X M, LING M, XIE F. Principle of axis error compensation of total station and its test method [J]. Journal of Geomatics, 2003, 28(3): 40-43.[14]尤宝平, 暴景阳, 崔高嵩, 等. 全站仪的补偿与改正研究[J]. 海洋测绘, 2004, 24(5): 29-31+45.YOU B P, BAO J Y, CUI G S, et al. The compensation and correction for the electronic total station observations [J].Hydrographic Surveying And Charting, 2004, 24(5): 29-31+45.[15]刘宗林. 浅谈全站仪的竖轴倾斜误差[J]. 西安文理学院学报(自然科学版), 2007, 10(2): 97-99.LIU Z L. Discussion on the vertical axis tilt error of total station [J]. Journal of Xi’an University of Arts amp; Science (Nat Sci Ed), 2007, 10(2): 97-99.[16]梁琦, 李铭. 浅谈全站仪的竖盘补偿器[J]. 大众科技,2011(10): 160-161.LIANG Y, LI M. Discussion on the vertical disk compensator of total station [J]. Popular Sciences, 2011(10): 160-161.[17]国家测绘局. 三四等导线测量规范: CH/T2007-2001[S].北京: 测绘出版社, 2003.。
测绘文集■n.全站仪的正倒镜测量误差与对策孙少亮(广东省测绘器具检定所)〔摘要〕介绍全站仪的电子补偿技术,正倒镜观测值的误差源的构成、影响和削减方法,以及怎样提高直线投影测量精度。
〔关键词〕全站仪;电子补偿技术;正倒镜观测值测量;直线投影测量全站仪的正倒镜测量有正倒镜观测值测量和直线投影测量两种情况,两者主要区别在于正倒镜观测值测量采用电子补偿后以角度读数的形式保证精度,而直线投影测量离开了仪器的读数示值,电子补偿功能没有发挥作用,以轴系的精密性保证精度。
全站仪的电子补偿技术电子补偿是根据实验室校正参数或传感器输出的校正参数,按照系统误差的数学规律计算出系统的预测值,然后用这个预测值对仪器的测量示值进行自动修正。
它有效提高测量精度,也大大降低生产加工工艺。
全站仪的电子补偿有:竖轴横向倾斜误差的电子补偿,竖轴纵向倾斜误差的电子补偿,横轴倾斜误差的电子补偿,视准轴倾斜误差的电子补偿,竖盘指标差的电子补偿,度盘偏心误差的电子补偿,度盘刻划误差的电子补偿等。
在轴系补偿方面,横轴和视准轴倾斜量校正参数来自实验室的校正结果,储存于仪器的内存中。
而竖轴倾斜的校正参数则来自于微倾斜传感器即所谓电子补偿器。
电子补偿器是一个灵敏度极高的电子“水泡”,其角度分辨率比常规的水泡高出许多倍。
它有“单轴补偿”、“双轴补偿”和“三轴补偿”之分。
“单轴补偿”是指仪器竖轴在视准轴方向(纵向)的倾斜分量a,对垂直度盘读数的补偿;“双轴补偿”是仪器竖轴在视准轴方向(纵向)的倾斜分量a,对垂直度盘读数的补偿和仪器竖轴在视准轴方向(横向)的倾斜分量毋对水平度盘读数的补偿;“三轴补偿”是在“双轴补偿”的基础上加了横轴倾斜补偿或者视准轴倾斜补偿。
这里的“单轴”、“双轴”、“三轴”与全站仪的三轴(视准轴、横轴和竖轴)不是一一对应关系。
补偿器的高精度必须以高稳定度为前提。
在全站仪实际应用中,通过正确校正后,补偿器不难达到其标称精度,或满足计量规程的要求,但发现许多仪器并不能将这一精度长久保持下去,甚至有的补偿器校正好不出--d”时,其零位误差就己达10”,和水准管的精度相当。