带CAN接口的Mini控制器上场说明
- 格式:pdf
- 大小:185.59 KB
- 文档页数:3

RANGER MINI2.0用户手册RANGER MINI2.0User ManualRANGER MINI2.0使用开发手册RANGER MINI2.0User Manual在机器人第一次通电前,任何个人或者机构在使用设备之前必须阅读并理解这些信息。
有任何相关使用的疑问都可以联系我们*****************,必须遵守并执行本手册其他章节中的所有组装说明和指南,这一点非常重要。
应特别注意与警告标志相关的文本。
Before using the robot,any individual or organization must read and understand the manual.If you have any questions about it,please do not hesitate to contact us at*****************.It is very important that you should follow and implement all instructions and guidelines in this manual.Please pay extra attention to the warnings.重要安全信息Important Safety Information本手册中的信息不包含设计、安装和操作一个完整的机器人应用,也不包含所有可能对这一完整的系统的安全造成影响的周边设备。
该完整的系统的设计和使用需符合该机器人安装所在国的标准和规范中确立的安全要求。
This manual does not cover the design,installation,and operation of a robotic application,nor does it include any equipment that may affect the safety of a robotic system.A robot system that uses the RANGER MINI2.0should be designed and used in compliance with the safety requirements and other standards of the corresponding countries.RANGER的集成商和终端客户有责任确保遵循相关国家的切实可行的法律法规,确保完整的机器人应用实例中不存在任何重大危险。

USBCANFD-100U-miniUSBCANFD 系列CANFD 接口卡修订历史目录1.产品简介 (1)1.1产品概述 (1)1.2产品外观 (1)1.3功能特点 (1)1.4产品规格 (2)1.4.1电气参数 (2)1.4.2工作温度 (2)1.5机械安装尺寸 (2)1.6典型应用 (3)2.设备硬件接口说明 (4)2.1USB接口 (4)2.2CAN通讯接口 (4)2.3信号指示灯 (5)2.4系统连接 (5)3.驱动程序安装 (8)3.1Windows系统下安装驱动程序 (8)4.检查和维护 (11)5.装箱清单 (12)6. ZCANPRO软件使用指南 (13)6.1ZCANPRO软件简介 (13)6.2USBCANFD在ZCANPRO上使用指南 (13)7.免责声明 (14)1.产品简介1.1 产品概述USBCANFD-100U-mini是广州致远电子开发的一款便捷式、高性能CANFD接口卡,其兼容USB2.0总线规范,集成1路CANFD接口,CAN通道集成独立的电气隔离保护电路。
接口卡使PC通过USB端口连接至CAN(FD)网络,构成CAN(FD)-bus控制节点。
USBCANFD-100U-mini高性能CANFD接口卡是CAN(FD)-bus产品开发、CAN(FD)-bus 数据分析的强大工具;USBCANFD-100U-mini接口卡上自带电气隔离模块,使接口卡避免由于地环流的损坏,增强系统在恶劣环境中使用的可靠性。
USBCANFD-100U-mini高性能CAN 接口卡支持Win7/Win10等操作系统。
1.2 产品外观图1.1产品外观1.3 功能特点●USB接口符合USB2.0高速规范;●支持CAN2.0A、B协议,符合ISO11898-1规范;●集成1路CANFD接口;●兼容高速CAN和CANFD;●CANFD支持ISO标准、Non-ISO标准。
●CAN通讯波特率在40Kbps~1Mbps之间任意可编程;●CANFD波特率在1Mbps~5Mbps之间任意可编程;●单通道发送最高数据流量:3000帧/秒(远程帧、单帧发送);●单通道接收最高数据流量:10000帧/秒(远程帧);●每通道支持最高64条ID滤波;●每通道支持最高100条定时发送报文,定时精度可达500us;●内置120欧终端电阻,可由软件控制接入与断开;●支持USB总线电源供电;●支持ZCANPRO配套软件(支持Win7、Win10操作系统);●提供上位机二次开发接口函数。

小型控制器的使用指南小型控制器是一种容易上手和使用的设备,本文将介绍如何使用小型控制器。
下面将对小型控制器的安装、连接以及基本使用进行详细的说明。
一、安装小型控制器首先,将小型控制器从包装盒中取出,并留意阅读器上的说明书。
在进行任何操作之前,请确认设备和其它设备之间的配合是否适当,例如电源、信号线等的接口是否连接正确。
在安装时,应将电源插头插入设备中,然后将控制器连接到您希望使用的其它设备上。
二、连接小型控制器小型控制器的连接可以是串口连接或是USB连接。
一些设备还提供用于连接设备的Ground连接器,它们被用来连接交互设备。
连接就是通过插头和插槽的组合来实现的。
请留意,不同类型的设备可能需要不同类型的插头和插槽。
三、小型控制器的基本使用小型控制器可以使用多个不同的编程语言和指令,以实现各种不同的功能和任务。
尽管有众多的编程语言可以用于小型控制器,但其中最常用的还是基于图形的编程软件,如LabVIEW。
在使用小型控制器时,最重要的是要熟悉小型控制器的基本操作和指令。
不同的小型控制器可能有不同的操作和指令,因此在使用前,应认真查看设备说明书,以确保您能正确地使用设备。
四、小型控制器的高级使用当您已经熟悉了小型控制器的基本操作和指令之后,您可以开始使用一些高级操作和指令,如使用多种编程语言和算法。
这些高级操作和指令可以让您更加灵活地控制您的设备,以实现更加复杂的功能和任务。
总而言之,小型控制器是一种容易上手和使用的设备。
本文介绍了小型控制器的安装、连接、基本使用以及高级使用。
熟悉这些基本操作和指令将有助于您更好地使用小型控制器,以实现您的控制需求。
说明书
一、产品规格及特点
1.本产品采用最新技术的高亮度激光器,主要技术参数分别如下
红光工作波长650nm;
绿光工作波长532nm。
2.输入电压:本产品采用AC110V交流适配器,额定输出功率12W。
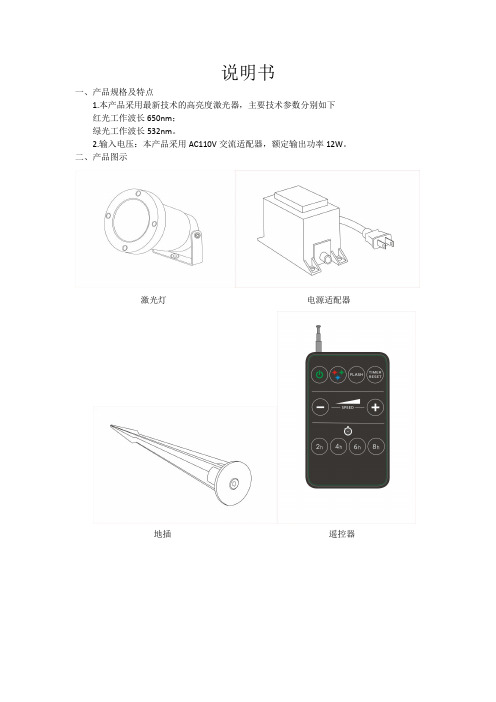
二、产品图示
激光灯电源适配器
地插遥控器
三、遥控器使用说明
天线
颜色闪烁
开关
定时重置闪烁速度-闪烁速度+定时选择
1.对码操作
在激光灯通电后,按住遥控器上的开关按键“”5秒左右,实现遥控器与激光
灯的对码。
注意:一个激光灯只能被一个遥控器对码,但是一个遥控器可同时对码多个激光灯。
2.功能按键操作
开关:每次关机清除除定时外的其他任何参数;
颜色选择:对于红绿双色户外灯,每次按键的效果是全亮→单红→单绿→全亮,如此循环;
闪烁模式选择:用于切换闪烁模式,每次按键的效果是全闪→红绿交替闪→单红闪→单绿闪→全闪,如此循环;
定时重置:按下此键取消定时设置,红光闪烁3次提示生效,且每次重置定时之前必须先按下此键,否则无法改变定时设置。
闪烁频率设置:“-”为减慢频闪速度,若在最慢频闪情况下再
按“-”键,则关闭频闪,保持长亮;“+”为加快频闪速度,若在最块频闪情况下再按“+”键,则无效,频闪保持最快闪烁速度。
其效果为不闪→慢速闪→中速闪→快速闪。
定时设置按键:定时设置有2小时、4小时、6小时、8小时可选,每次按下定时键之前必须先按“TIMER RESET”按键,且激光灯闪烁3次提示生效。
注意:激光灯上电之后保持双色出光长亮模式。
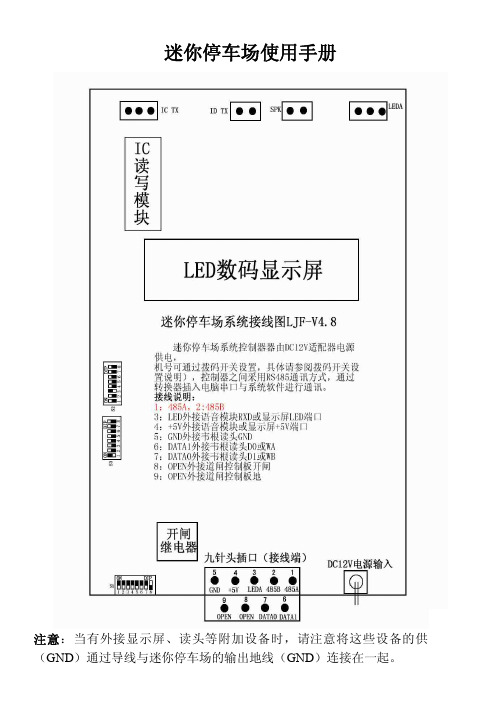
迷你停车场使用手册注意(GND)通过导线与迷你停车场的输出地线(GND)连接在一起。
迷你车场系统是临时卡计费器的升级版,增加了刷卡播报语音,数码管显示功能,收费时数码管显示收费金额,卡片余额,月卡可用日期等。
入场:播报“欢迎光临,此卡可用日期xxxx 日”,数码管显示 可用日期天数可用日期最大显示9999日。
出场:播报“一路顺风,此卡可用日期xxxx 日”,数码管显示 可用日期天数可用日期最大显示9999日。
临时卡:有效入场:播报“欢迎光临”,数码管显示“H-001”出场:收费播报“一路顺风,请交费xxxx 元”,数码管显示交费金额,不收费 风”,数码管显示“F-000”储值卡:有效入场:播报“欢迎光临,此卡余额xxxx 元”,数码管显示余额”出场:收费播报“一路顺风,此次交费xxxx 元,余额”硬件功能设置注意:主控板及临时卡计费器拨码开关设置一致S1 设置控制机机号:S1-1:拨到ON为入口、拨到OFF为出口S1-2:拨到ON为0,拨到OFF为64S1-3:拨到ON为0,拨到OFF为32S1-4:拨到ON为0,拨到OFF为16S1-5:拨到ON为0,拨到OFF为8S1-6:拨到ON为0,拨到OFF为4S1-7:拨到ON为0,拨到OFF为2S1-8:拨到ON为0,拨到OFF为1S2主功能设置:S2-1:拨到ON为道闸关到位才能读卡S2-2:拨到ON为下载卡号有效S2-3:拨到ON为临时卡手动开闸,拨OFF为临时卡自动开闸 S2-4:拨到ON为储值卡手动开闸,拨OFF为储值卡自动开闸 S2-5:拨到ON为免费卡手动开闸,拨OFF为免费卡自动开闸 S2-6:拨到ON为月卡手动开闸, 拨到OFF为月卡自动开闸 S2-7:拨到ON为ID卡手动开闸, 拨到OFF为ID卡自动开闸 S2-8:拨到ON为场内小车场, 拨到OFF为大车场S3辅助功能设置S3-1 :拨到ON为无需压地感读卡(无车取卡),拨到OFF为需压地感读卡(一车一卡)。

U-mini飞控说明书U-mini飞控为U100的升级换代产品,主要升级内容:1、升级自动油门(定高定向模式下,以当前油门为基准,掉高自动加油,返航模式以最低油门为准,掉高自动加油)2、自动锁定回家位置(当飞控第一次达到8颗以上的时候,自动保存当前位置为回家位置。
)3、自动滑降(平衡模式下,油门很小,会自动低头,避免失速)4、全自动失控保护。
输入通道不动,手动、3D模式5秒,平衡模式15秒,定高定向模式30秒,飞控自动转入返航模式,通道变化,解除失控保护。
(这个功能用户可以关闭)5、增加支持切糕433的PPM3线连接接收机(3根线连接,使用方便)6、摇杆设定参数7、增加在线升级功能,用户自己升级新版本程序8、增加3级最低返航高度设置(70,140,210米)。
高于这个最低设定高度,飞机按照实际高度返航,低于这个高度,则飞机爬升到最低高度返航,这个可以避免过低返航,导致碰撞9、改进微分法3D飞行模式。
3D模式下花式飞行飞行更稳定、轻松、自如。
飞控与一般接收机连接图:飞控调节步骤:安装:将飞控水平放置于飞机上(尽量靠近重心位置),飞控头部向前(按照说明的箭头方向放置)。
飞控最好采取一定的减震措施,最好是皮筋悬空或加海绵减震。
输入端口的副翼、平尾、油门、垂尾、三段开关、二段开关连接到遥控器接收机相应通道上。
调试:(请严格按照1-6的以下步骤调试)1:调节飞控反馈方向和幅度。
加电、遥控设定为平衡模式,这个时候,分别调节副翼通道增益、水平尾翼增益,电位器中间为增益最小,左右为相反的增益方向和大小。
调节到反馈方向正确、反馈大小适中即可(反馈过大会导致飞行中震荡)。
2:调节方向舵反馈方向。
将模式调节到3D模式,左右摆动机身使反馈方向和幅度合适。
3:在遥控器上调节副翼通道、水平尾翼通道、垂直尾翼通道的正反控制。
使手动模式和平衡模式下,控制和舵面动作相一致。
4:将遥控器副翼、俯仰、方向舵微调回中。
5:将飞机调节到手动模式,据此调节各个舵机的连杆,使舵面的角度到正常的适中位置。
USBCAN-I-mini小型智能CAN 接口卡修订历史目录1. 功能简介 (1)1.1产品概述 (1)1.2参数指标 (1)1.3产品外观 (2)1.4典型应用 (2)2. 设备安装 (3)2.1CAN-bus 连接器 (3)2.2信号指示灯 (3)2.3系统连接 (4)2.3.1CAN 总线连接 (4)2.3.2总线终端电阻 (5)3. 驱动程序安装 (6)3.1在Windows系统下第一次安装驱动程序 (6)3.2检查设备是否安装成功 (7)3.2.1打开WINDOWS设备管理器 (7)3.2.2确认新的设备是否已经成功安装 (8)3.3在Linux下驱动安装 (8)4. 快速使用指南 (9)CANTest基本操作 (9)4.1.1设备类型选择 (9)4.1.2滤波设置 (10)4.1.3启动CAN (11)4.1.4获取设备信息 (12)4.2发送接收实验 (13)4.2.1搭建测试环境 (13)4.2.2打开设备 (13)4.2.3发送数据 (13)4.2.4实时保存与停止保存 (15)4.2.5总线利用率 (15)4.2.6错误信息显示 (16)5. 接口库函数使用方法 (17)5.1在windows下调用动态库的方法 (17)5.1.1VC调用动态库的方法 (17)5.1.2VB调用动态库的方法 (17)5.2接口库函数使用流程 (19)6. 检查和维护 (20)7. 免责声明 (22)附录A CAN报文滤波器设置 (23)A.1单滤波配置 (23)A.2双滤波配置 (25)附录B DB9转OBD接口 (28)B.1功能简介 (28)B.2技术参数 (28)B.3引脚信息 (28)B.3.1DB9接头引脚排列 (28)B.3.2DB9接头引脚描述 (29)B.3.3OBD接头引脚排列 (29)B.3.4OBD接头引脚描述 (30)B.4机械尺寸 (30)附录C SJA1000标准波特率 (31)1. 功能简介1.1 产品概述USBCAN-I-mini智能CAN接口卡是系列USBCAN便携版本,与USBCAN-I单路智能CAN接口卡完全兼容。
广州致远电子有限公司USBCAN-E-mini小型智能CAN 接口卡修订历史目录1. 功能简介 (1)1.1产品概述 (1)1.2参数指标 (1)1.3产品外观 (2)1.4典型应用 (2)2. 设备安装 (3)2.1CAN-bus 连接器 (3)2.2信号指示灯 (3)2.3系统连接 (4)2.3.1CAN 总线连接 (4)2.3.2总线终端电阻 (4)3. 驱动程序安装 (6)3.1在Windows系统下第一次安装驱动程序 (6)3.2检查设备是否安装成功 (7)3.2.1打开WINDOWS设备管理器 (7)3.2.2确认新的设备是否已经成功安装 (8)3.3在Linux下驱动安装 (8)4. 快速使用指南 (9)4.1CANTest基本操作 (9)4.1.1设备类型选择 (9)4.1.2滤波设置 (10)4.1.3启动CAN (11)4.1.4获取设备信息 (12)4.2发送接收实验 (13)4.2.1搭建测试环境 (13)4.2.2打开设备 (13)4.2.3发送数据 (13)4.2.4实时保存与停止保存 (15)4.2.5总线利用率 (15)4.2.6错误信息显示 (16)5. 接口库函数使用方法 (17)5.1在windows下调用动态库的方法 (17)5.1.1VC调用动态库的方法 (17)5.1.2VB调用动态库的方法 (17)5.2接口库函数使用流程 (19)6. 检查和维护 (20)7. 免责声明 (22)附录A DB9转OBD接口 (23)A.1功能简介 (23)A.2技术参数 (23)A.3引脚信息 (23)A.3.1DB9接头引脚排列 (23)A.3.2DB9接头引脚描述 (24)A.3.3OBD接头引脚排列 (24)A.3.4OBD接头引脚描述 (25)A.4机械尺寸 (25)附录B ARM标准波特率 (26)1. 功能简介1.1 产品概述USBCAN-E-mini智能CAN接口卡是系列USBCAN便携版本,与USBCAN-I单路智能CAN接口卡完全兼容。
带CAN接口的Mini控制器上场说明
为在简化版电控系统实现车辆限速等控制,故新开发带CAN接口的Mini控制器WG9716582005,其与WG9716582004的主要区别如下:
1.外观
如上图所示,WG9716582004(上件)为黑色外壳,而WG9716582005(下件)为蓝色外壳。
2.接口定义
WG9716582004 WG9716582005
接口编号
接口名称有效形式 接口名称有效形式 A1 30点H 30点
A2 地 L 地
A3 危急报警开关 H 危急报警开关 H A4 左转向灯开关 H 左转向灯开关 H A5 右转向灯开关 H 右转向灯开关 H A6 后雾灯开关 H 后雾灯开关 H A7 近光工作状态 H 起动信号 H A8 雨刮回位信号 L 雨刮回位信号 L A9 自诊断 5脉冲备用输入 L A10 发电机W点 脉冲信号(0~1.5KHz)CAN_H
A11 位置灯开关 H CAN_L
A12 雨刮间歇开关 H 雨刮间歇开关 H A13 雨刮喷淋开关 H 雨刮喷淋开关 H A14 15点H 15点 H A15 挂车左转向灯输出 H 挂车左转向灯输出 H A16 挂车右转向灯输出 H 挂车右转向灯输出 H A17 主车左转向灯输出 H 主车左转向灯输出 H A18 主车右转向灯输出 H 主车右转向灯输出 H A19 后雾灯输出 H 后雾灯输出 H A20 远光工作状态 H 备用输入 H A21 前雾灯继电器输出 H 前雾灯继电器输出 H A22 发动机工作输出 H 发动机工作输出 H A23 前雾灯开关 H 前雾灯开关 H A24 雨刮低速继电器输出 H 雨刮低速继电器输出 H
WG9716582004 WG9716582005
接口编号
接口名称有效形式 接口名称有效形式 A25 雨刮低速开关 H 雨刮低速开关 H
B1 预热继电器输出 H 预热继电器输出 H
B2 排气制动输出 H 排气制动输出 H
B3 空档信号L 空档信号L
B4 离合器信号 常态为高断开有效 离合器信号 常态为高断开有效
B5 排气制动开关 L 排气制动开关 L
B6 预热开关 H 预热开关 H
WG9716582005与WG9716582004在接口定义的区别见上表的黄底部分。
3.下线标定
WG9716582005需通过六合一工具进行“发动机起动控制”的标定,默认
WG9716582005不进行发动机起动控制,如标定其进行发动机起动控制,则车辆
VIN不仅须写入发动机ECU,同时也要写入WG9716582005,界面如下。
售后若更换WG9716582005,需进行“发动机起动控制”的标定。
4.线束及发动机程序等
WG9716582005需配合相关发动机程序及线束一起使用。
技术中心
二○一三年六月。