二维力传感器
- 格式:docx
- 大小:60.65 KB
- 文档页数:2
EPSON RC+ 7.0选件Force Guide 7.0 SPEL+ Language Reference Rev.5EPSON RC+ 7.0选件Force Guide 7.0SPEL+ Language ReferenceRev.5Copyright © 2015-2018 SEIKO EPSON CORPORATION. All rights reserved.Force Guide 7.0 SPEL+ Language Reference Rev.5 i前言感谢您购买本公司的机器人系统。
本手册记载了正确使用Force Guide 7.0所需的事项。
使用该软件时请仔细阅读本手册与其他相关手册。
阅读之后请妥善保管,以便随时取阅。
保修本机器人及其选装部件是经过本公司严格的质量控制、测试和检查,并在确认性能满足本公司标准之后出厂交付的。
在交付产品的保修期内,本公司仅对正常使用时发生的故障进行免费修理。
(有关保修期事项,请咨询您的区域销售办事处。
)但在以下情况下,将对客户收取修理费用(即使在保修期内):1.因不同于手册内容的错误使用以及使用不当而导致的损坏或故障。
2.客户未经授权进行拆卸导致的故障。
3.因调整不当或未经授权进行修理而导致的损坏。
4.因地震、洪水等自然灾害导致的损坏。
警告、小心、使用:1.如果机器人或相关设备的使用超出本手册所述的使用条件及产品规格,将导致保修无效。
2.本公司对因未遵守本手册记载的“警告”与“注意”而导致的任何故障或事故,甚至是人身伤害或死亡,均不承担任何责任,敬请谅解。
3.本公司不可能预见所有可能的危险与后果。
因此,本手册不能警告用户所有可能的危险。
ii Force Guide 7.0 SPEL+ Language Reference Rev.5商标Microsoft、Windows、Windows标识、Visual Basic及Visual C++为美国MicrosoftCorporation在美国和/或其它国家的注册商标或商标。
力传感器基本原理
力传感器基本原理是利用一些特定材料的电阻、压电、电容等性质的变化来检测外力的大小。
以下是其中一些常见的原理:
1. 电阻式力传感器:基于材料的电阻随变形或应力改变而发生变化的特性。
通常使用恒压或恒流方式供电,在材料上施加外力后,测量电流或电压的变化来计算力的大小。
2. 压电式力传感器:利用压电材料的特性,即在施加外力时会生成电荷的现象。
当外力施加在压电材料上时,材料会产生电荷,通过测量产生的电荷量来确定外力的大小。
3. 电容式力传感器:利用电容的变化来检测外力的大小。
当外力施加在电容式力传感器上时,感应电容的尺寸或介质特性发生变化,从而改变电容值。
通过测量电容值的变化来确定外力的大小。
4. 光电式力传感器:基于光电效应的原理,将外力转化为光信号的改变来进行力的测量。
当外力影响到光电传感器时,照射在光敏元件上的光强度会发生变化,通过测量光电信号的变化来计算力的大小。
5. 磁电式力传感器:利用磁电效应的原理,将外力转化为磁场的变化来进行力的测量。
当外力施加在磁电器件上时,磁场的分布会发生变化,通过测量磁场的变化来计算力的大小。
这些力传感器基本原理的选择取决于不同应用的需求和要求。
力传感器的分类力传感器分为哪几类?一、应变管式XJC-TS26-Q 鑫精诚传感器692系列Huba Control 富巴工业力传感线缆系列Alliance 莱恩&联众传感线缆TPS201118-61 Topos 特普生WTAL121-N30K Woosens 沃感科技广告在筒壁上贴有2片或4片应变片,在这当中一半贴在实心部分当作温度补偿片,剩下的一半当作测定应变片。
当没有压力时4片应变片组成平衡的全桥式电路;当压力作用于内腔时,圆筒变形成“腰鼓形”,使电桥电路失去平衡,输出与压力成一定关系的电压。
这类传感器还能够使用活塞将被测压力转换为力传输到应变筒上或通过垂链形状的膜片传输被测压力。
应变管式压力传感器的结构简洁、制造方便、实用性强,在火箭弹、炮弹和火炮的动态压力测量方面有广泛运用。
二、膜片式它的弹性敏感元件为周边固定圆形金属平膜片。
膜片受压力变形时,中心处径向应变和切向应变均达到正的最高值,而边缘处径向应变达到负的最高值,切向应变为零。
所以常把两个应变片分别贴在正负较大应变处,并连接成相邻桥臂的半桥电路以得到较大灵敏度和温度补偿作用。
选用圆形箔式应变计则能最大限度地使用膜片的应变效果。
这类传感器的非线性较明显。
膜片式压力传感器的最新产品是将弹性敏感元件和应变片的作用集于单晶硅膜片一身,即选用集成电路工艺在单晶硅膜片上扩散制作电阻条,并选用周边固定结构制成的固态压力传感器。
三、应变梁式测定较小压力时,可选用固定梁或等强度梁的结构。
一类方法是用膜片把压力转换为力再通过传力杆传输给应变梁。
四、组合型在组合型应变压力传感器中,弹性敏感元件可分为感受元器件和弹性应变元器件。
感受元器件把压力转换为力传输到弹性应变元器件应变最敏感的位置,而应变片则贴在弹性应变元器件的较大应变处。
事实上较复杂的应变管式和应变梁式都属于这类型式。
感受元器件有膜片、膜盒、波纹管、波登管等,弹性应变元器件有悬臂梁、固定梁、Π形梁、环形梁、薄壁筒等。
常见的工业机器人传感器类型和作用介绍工业机器人是现代工业生产中的重要设备,它可以自动完成各种工艺操作,提高生产效率和质量。
而机器人要实现自主操作和与环境的交互,就必须依赖传感器来获取各种信息。
下面将介绍一些常见的工业机器人传感器类型及其作用。
1.视觉传感器:视觉传感器是机器人中应用最广泛的传感器之一,可以帮助机器人获取周围环境的图像信息,实现目标识别、位置定位、检测等功能。
常见的视觉传感器包括CCD相机、CMOS相机等,其分辨率越高,精度越高。
2.力传感器:力传感器可以测量机器人与周围环境之间的力和力矩,实现精确控制和操作。
常见的力传感器有电容式、压阻式、电感式等,可以应用于装配、抓取、力控处置等任务。
3.距离传感器:距离传感器可以测量机器人与物体之间的距离,实现避障、定位等功能。
常见的距离传感器包括激光传感器、超声波传感器、红外线传感器等,可以用于测距、测量高度等任务。
4.光电传感器:光电传感器可以检测物体的存在、颜色、形状等特性,实现物体识别、分类、定位等功能。
常见的光电传感器有光电开关、光幕、光电编码器等,可以应用于自动分拣、装配等任务。
5.温度传感器:温度传感器可以测量机器人周围环境的温度变化,实现温度控制、安全保护等功能。
常见的温度传感器包括热敏电阻、热电偶等,可以用于焊接、烤箱等工作环境中。
6.声音传感器:声音传感器可以检测周围环境中的声音,实现语音交互、声音控制等功能。
常见的声音传感器有麦克风、声纳等,可以应用于机器人导航、语音识别等任务。
7.气体传感器:气体传感器可以检测周围环境中的气体浓度和成分,实现气体分析、安全监测等功能。
常见的气体传感器有气体传感电阻、气体传感器阵列等,可以应用于有害气体探测、环境监测等任务。
8.触摸传感器:触摸传感器可以感知机器人与物体接触的力和位置,实现精确控制和安全保护。
常见的触摸传感器有电容触摸传感器、压阻触摸传感器等,可以用于装配、物体操纵等任务。
2d视觉传感器工作原理2D视觉传感器工作原理简介2D视觉传感器是一种广泛应用于机器视觉领域的传感器,能够捕捉并处理2D图像信息。
本文将介绍2D视觉传感器的工作原理、应用领域以及未来发展趋势。
一、工作原理1. 图像采集2D视觉传感器通过光学镜头将场景中的光线聚焦到图像传感器上,图像传感器将光线转换为电信号并输出原始图像。
常见的图像传感器包括CCD(电荷耦合器件)和CMOS(互补金属氧化物半导体)。
CCD是一种光电转换器件,其感光元件由像素阵列组成,能够将光子转化为电子,并通过读取电荷量的方式获取图像信息。
CMOS传感器则由一系列像素和相关电路组成,每个像素都包含感光元件和一些用于信号处理的电路。
CMOS传感器具有低功耗、集成度高等特点,逐渐取代了CCD传感器成为主流。
2. 图像处理获得原始图像后,2D视觉传感器通过图像处理算法对图像进行处理和分析。
常见的处理算法包括图像滤波、边缘检测、特征提取、目标识别等。
图像滤波用于降噪和增强图像质量,常见的滤波算法有高斯滤波、中值滤波等。
边缘检测用于寻找图像中的边缘信息,常见的边缘检测算法有Sobel算子、Canny算子等。
特征提取用于提取图像中的关键特征,如角点、直线、圆等。
常见的特征提取算法有Harris角点检测、霍夫变换等。
目标识别是指在图像中自动识别和定位感兴趣的目标。
常见的目标识别算法有模板匹配、机器学习等。
3. 结果输出经过图像处理后,2D视觉传感器将分析结果输出给机器视觉系统进行进一步处理。
输出结果可以是图像中目标的位置、尺寸、形状等信息,也可以是对目标属性的判断(如颜色、纹理等)。
二、应用领域2D视觉传感器在各个领域都有广泛的应用,以下列举几个典型的应用领域:1. 工业自动化在工业自动化中,2D视觉传感器常用于产品质量检测、物体定位和识别、机器人导航等。
例如,可以利用2D视觉传感器对产品表面进行缺陷检测,对物体进行定位和抓取,或者对机器人进行路径规划和避障。
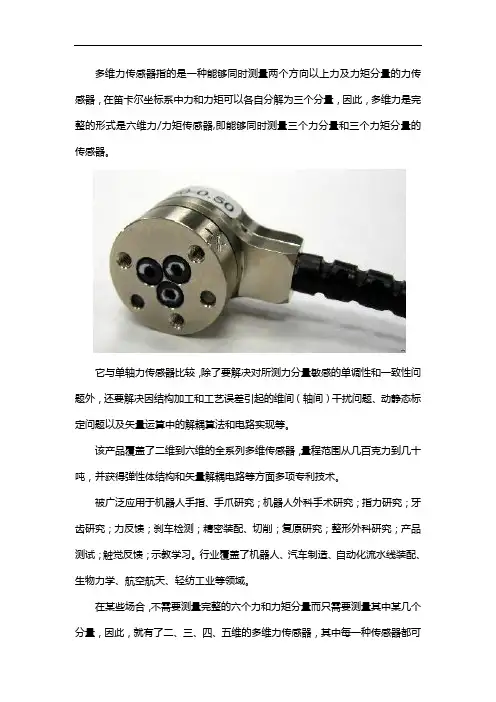
多维力传感器指的是一种能够同时测量两个方向以上力及力矩分量的力传感器,在笛卡尔坐标系中力和力矩可以各自分解为三个分量,因此,多维力是完整的形式是六维力/力矩传感器,即能够同时测量三个力分量和三个力矩分量的传感器。
它与单轴力传感器比较,除了要解决对所测力分量敏感的单调性和一致性问题外,还要解决因结构加工和工艺误差引起的维间(轴间)干扰问题、动静态标定问题以及矢量运算中的解耦算法和电路实现等。
该产品覆盖了二维到六维的全系列多维传感器,量程范围从几百克力到几十吨,并获得弹性体结构和矢量解耦电路等方面多项专利技术。
被广泛应用于机器人手指、手爪研究;机器人外科手术研究;指力研究;牙齿研究;力反馈;刹车检测;精密装配、切削;复原研究;整形外科研究;产品测试;触觉反馈;示教学习。
行业覆盖了机器人、汽车制造、自动化流水线装配、生物力学、航空航天、轻纺工业等领域。
在某些场合,不需要测量完整的六个力和力矩分量而只需要测量其中某几个分量,因此,就有了二、三、四、五维的多维力传感器,其中每一种传感器都可
能包含有多种组合形式。
产品既可与控制计算机组成两级计算机系统,也可联接终端,构成独立的测试装置,因此受到了广大用户的额青睐。
用户如有购买需求,可咨询郑州沐宸自动化科技有限公司。
该企业目前涵盖的产品类别有力传感器、多维力传感器、扭矩传感器、位移传感器、压力传感器、加速度传感器、液位传感器等,同时可根据客户的需求,定制各类传感器。
力传感器应用举例及原理力传感器是一种用于测量物体的压力与扭矩的装置,它广泛应用于医疗设备、机械工业、汽车工业、航空航天、建筑工程等领域。
本文将介绍一些关于力传感器的应用举例及原理。
一、应用举例1. 汽车工业:力传感器可用于汽车的刹车测试、悬挂系统力测试、转向力测试和发动机输出扭矩测试等多个场景。
2. 医疗设备:力传感器可以测量人体的肌肉力量和身体的重量等信息,可以用于研究人体的生理变化。
3. 建筑工程:力传感器可用于检测混凝土中的拉力和压力等信息,判断结构是否受到很好的支撑。
4. 航空航天:力传感器可以分别测量飞行器的起飞力、着陆力和飞行中受到的各种力。
二、原理力传感器的实质是将物体受到的压力或扭矩转化为电信号,然后再进行处理。
其原理主要为:在传感器中,由于受到物体的压力或扭矩,传感器会发生微小的形变,这种形变会改变电路中的输出信号。
常见的力传感器主要有应变式和压电式两种。
1. 应变式力传感器应变式力传感器主要是应变计测量的,应变计是一种电阻器,它的阻值受力作用后会有变化。
将应变计粘贴于力传感器内部,当力传感器受到压力或扭矩时,应变计会产生形变,导致输出电阻的变化。
接下来,对这种变化的电阻进行更精确的测量,就可以获取得到它所受到的压力或扭矩大小。
2. 压电式力传感器在压电式力传感器中,它的压电晶体将受到力后产生电荷的变化,从而输出电压的值,所受到的力越大,输出电压值越高。
压电效应是指特定的物质在受力后会产生电荷,在力传感器中,压电晶体被放置在支撑结构上,当受到力时,压电晶体就会发生位移并输出电压信号。
总的来说,力传感器通过将物体的压力或扭矩转化为电信号,进行量化和处理,使得我们可以准确地得到物体所受到的各种力,对于科学研究与实际应用场景都具有非常重要的作用。
力传感器原理力传感器是一种能够测量物体施加在其上的力的设备。
力传感器的原理是根据力的作用方式和力的效应来进行测量的。
下面将介绍力传感器的原理及其应用。
1. 力的作用方式力可以分为压力、拉力和剪力三种作用方式。
对于不同的作用方式,力传感器采用不同的传感原理来进行测量。
2. 力的效应施加在物体上的力会引起物体发生形变或产生应变。
力传感器通过检测物体的形变或应变来间接测量物体所受的力大小。
3. 力传感器的传感原理(1)压阻式传感器:压阻式力传感器是利用材料的压阻效应来进行测量的。
当力作用在传感器上时,传感器内部的材料会发生形变,从而改变电阻值。
通过测量电阻值的变化,可以得到施加在传感器上的力的大小。
(2)应变式传感器:应变式力传感器是利用材料的应变效应来进行测量的。
当力作用在传感器上时,传感器内部的应变片会发生形变,从而改变电阻或电容的值。
通过测量电阻或电容的变化,可以得到施加在传感器上的力的大小。
(3)电磁式传感器:电磁式力传感器是利用磁场的变化来进行测量的。
当力作用在传感器上时,传感器内部的磁场会发生变化,从而引起感应电动势的变化。
通过测量感应电动势的变化,可以得到施加在传感器上的力的大小。
4. 力传感器的应用力传感器广泛应用于工业自动化、仪器仪表、机器人、汽车等领域。
例如,在工业生产中,力传感器可以用于测量机器人的抓取力度,以保证产品的质量和稳定性。
在汽车制造中,力传感器可以用于测量刹车系统的压力,以确保刹车的准确性和安全性。
总结:力传感器是一种能够测量物体施加在其上的力的设备,其原理是根据力的作用方式和力的效应进行测量的。
根据不同的作用方式,力传感器采用不同的传感原理来进行测量。
力传感器在工业自动化、仪器仪表、机器人、汽车等领域有着广泛的应用。
通过力传感器的使用,可以实现对力的精确测量,提高生产效率和产品质量。
二维材料在传感器中的应用随着科技的不断进步,各种新技术相继涌现。
其中,二维材料作为一种新型材料,其应用领域也在不断扩展和深化。
在传感器领域,二维材料在提高传感器灵敏度和响应速度等方面具有巨大的潜力,因此备受关注。
一、什么是二维材料二维材料是指只有一个或几个原子层厚度的材料,具有高比表面积、强烈的量子尺寸效应、优异的光、电、磁性能等独特特性。
常见的二维材料有石墨烯、黑磷、过渡族金属二硫化物等。
二、二维材料在传感器中的应用1. 气体传感器气体传感器是指能检测某些气体浓度变化的传感器。
二维材料能够有效提高气体传感器的检测灵敏度和响应速度。
例如,石墨烯在气体传感器中的应用已经取得了一定的成果,可以检测出少至几ppb浓度的气体。
石墨烯与气体分子相互作用的机制是通过表面吸附和化学反应两种形式,从而实现气体传感。
2. 温度传感器温度传感器是指能够检测某一区域的温度变化的传感器。
二维材料作为新型材料,其电阻率和热电性能与传统材料有较大差异,因此可用于温度传感器。
例如,钼二硫化物在室温下具有高灵敏度温度传感器的电学特性,能够有效地检测出低于0.1 K的温度变化。
3. 光学传感器光学传感器是指通过光学原理来检测某些目标的传感器。
二维材料具有优越的光学性质,可应用于光学传感器。
例如,石墨烯显微镜,它可以实现高分辨率成像和光学信号检测。
4. 压力传感器压力传感器是指能够检测某一物体的压力大小的传感器。
二维材料能够有效提高压力传感器的检测灵敏度和响应速度,例如,黑磷在压力传感器中的应用,可以检测出几百Pa压力变化。
黑磷的这种特性与其层状结构中原子间的相互作用及其电性质密切相关。
三、二维材料在传感器中的优势与传统材料相比,二维材料在传感器中的优势主要有以下几个方面:1. 高比表面积:二维材料由于只有一个或几个原子层厚度,因此具有极高的比表面积,能够提高传感器的检测灵敏度。
2. 优异的光、电、磁性能:二维材料具有独特的光、电、磁性能,在传感器中可以实现精确的测量和控制。
机器人常用的传感器有哪几种机器人常用传感器根据检测对象的不同可分为内部传感器和外部传感器。
内部传感器主要用来检测机器人本身状态(如手臂间角度),多为检测位置和角度的传感器。
外部传感器主要用来检测机器人所处环境(如是什么物体,离物体的距离有多远等)及状况(如抓取的物体是否滑落)的传感器。
具体有物体识别传感器、物体探伤传感器、接近觉传感器、距离传感器、力觉传感器,听觉传感器等。
1、二维视觉传感器二维视觉传感器主要就是一个摄像头,它可以完成物体运动的检测以及定位等功能,二维视觉传感器已经出现了很长时间,许多智能相机可以配合协调工业机器人的行动路线,根据接收到的信息对机器人的行为进行调整。
2、三维视觉传感器最近三维视觉传感器逐渐兴起,三维视觉系统必须具备两个摄像机在不同角度进行拍摄,这样物体的三维模型可以被检测识别出来。
相比于二维视觉系统,三维传感器可以更加直观的展现事物。
3、力扭矩传感器力扭矩传感器是一种可以让机器人知道力的传感器,可以对机器人手臂上的力进行监控,根据数据分析,对机器人接下来行为作出指导。
4、碰撞检测传感器工业机器人尤其是协作机器人最大的要求就是安全,要营造一个安全的工作环境,就必须让机器人识别什么事不安全。
一个碰撞传感器的使用,可以让机器人理解自己碰到了什么东西,并且发送一个信号暂停或者停止机器人的运动。
5、安全传感器与上面的碰撞检测传感器不同,使用安全传感器可以让工业机器人感觉到周围存在的物体,安全传感器的存在,避免机器人与其他物体发生碰撞。
6、电磁传感器现代的磁旋转传感器主要包括有四相传感器和单相传感器。
在工作过程中,四相差动旋转传感器用一对检测单元实现差动检测,另一对实现倒差动检测。
这样,四相传感器的检测能力是单元件的四倍。
而二元件的单相旋转传感器也有自己的优点,也就是小巧可靠的特点,并且输出信号大,能检测低速运动,抗环境影响和抗噪声能力强,成本低。
因此单相传感器也将有很好的市场。
力传感器的工作原理力传感器是一种能够测量物体受到的外界力大小的装置。
它的工作原理通常基于弹性变形、压电效应、电阻、电容等原理。
下面将详细介绍几种常见的力传感器的工作原理。
1.弹性变形原理弹性变形原理是力传感器中最常用的工作原理之一、它利用被测物体在受力时发生的弹性变形来间接测量外界力的大小。
传感器通常由金属弹簧或弹性体组成,当受力作用于传感器时,弹簧或弹性体会发生变形,其变形量与外界力成正比。
传感器中通常会嵌入应变片以测量变形量,并将其转化为相应的电信号输出。
2.压电效应原理压电效应原理是一种通过压电材料来测量外界力的工作原理。
压电材料的结构使其在受力作用下会发生电荷极化现象,产生电势差,该电势差与外界力的大小成正比。
压电效应的应用广泛,常见的压电材料有石英、压电陶瓷等。
传感器中通常会使用压电材料作为传感元件,通过测量其输出电荷或电势差来间接测量外界的力。
3.电阻效应原理电阻效应原理是一种通过电阻的变化来测量外界力的工作原理。
该原理通常基于材料的电阻随外界力发生的压力或扭转变化而变化。
传感器中通常会使用电阻片或薄膜作为传感元件,当受力作用于传感器时,电阻发生变化,通过测量电阻值的变化来间接测量外界的力。
4.电容效应原理电容效应原理是一种通过电容的变化来测量外界力的工作原理。
该原理通常基于材料的电容随外界力的作用而发生变化。
传感器中通常会使用电容传感元件,当受力作用于传感器时,电容值会随之改变,通过测量电容值的变化来间接测量外界的力。
以上介绍了几种常见的力传感器的工作原理,每种原理都有其特点和适用范围。
力传感器的选择应根据测量要求进行,传感器的精度、灵敏度、线性度以及可靠性等因素都需要考虑。
由于涵盖了多个原理,力传感器在工业控制、机械设备、自动化系统等领域有着广泛的应用。
二维材料在生物传感器中的应用随着科技的不断进步,生物传感技术在生命科学、医疗保健、环境监测等方面得到了广泛的应用。
二维材料作为新型材料,以其出色的电学、光学、热学等性能受到了广泛关注。
现如今,二维材料被用于生物传感器中,不仅可以提高传感器的灵敏度和功能性,也能够降低传感器成本,特别是在人类健康和疾病预防等领域将会有广阔前景。
一、什么是二维材料二维材料,指的是晶格仅具有两个维度的材料。
例如,石墨烯是一种单层碳原子组成的材料,具有极大的表面积和绝对的厚度。
在过去的二十年间,许多材料科学家发现了一些其他的二维材料,例如硫化钼和氧化硅等。
像石墨烯这样的材料在电学、光学和机械方面的应用已有了广泛的研究,同时它们也展示了在生物科技方面应用的巨大潜能。
二、二维材料在生物传感器中的应用1. 提高传感器的灵敏度生物传感器是使用特定的生物分子来检测分析物的一种装置。
与传统的生物传感器相比,二维材料在分子粘附和表面的反应中更加灵敏。
石墨烯和石墨烯氧化物等二维材料的高度表面积和低法向吸附能力使其成为生物分子的极好载体。
因此,其结构和物理条件使得它们优于传统生物传感器以及许多常规的分析设备,如荧光检测和电化学检测等。
2. 提高传感器的功能性二维材料在生物传感器中的另一个优点是可以添加到传感器中从而赋予其更多的功能。
例如,石墨烯的导电性能能够被利用来构建电化学传感器;二维材料的表面功能化也可以在生物传感器中用于检测生物分子或细胞。
再比如,钼酸盐纳米带可以在生物传感器中被用作信号放大器。
3. 降低传感器成本作为一种新型的材料,二维材料相对较少,且市场价值高,但这并不妨碍它成为生物传感器的重要组成部分。
二维材料可用于微型传感器中,以降低生产成本。
如今,有许多实验室都在研究不同类型的二维材料用于生物传感的应用。
三、二维材料在医学诊断和治疗中的应用除了在生物传感器中的应用外,二维材料还被用于医学诊断和治疗。
例如,标记石墨烯可用于成像和治疗肺部疾病,例如假性结核病、肺癌和肺炎。
二维风速风向传感器原理一、引言随着气象监测和环境研究的快速发展,风速风向传感器的应用越来越广泛。
二维风速风向传感器作为一种先进的测量设备,能够同时获取风速和风向两个维度的数据,对于气象预报、空气质量监测、风力发电等领域具有重要意义。
本文将详细阐述二维风速风向传感器的原理、应用场景及发展趋势。
二、二维风速风向传感器原理二维风速风向传感器主要通过测量风力作用在物体上的力矩来实现对风速和风向的测量。
它通常由一个旋转轴和一对力臂组成。
当风吹向传感器时,风力作用在力臂上,产生力矩,使旋转轴发生偏转。
通过测量旋转轴的偏转角度,可以计算出风速和风向。
具体来说,二维风速风向传感器的工作原理如下:1.当风吹向传感器的力臂时,力臂受到风力的作用,产生力矩,使旋转轴发生偏转。
2.旋转轴的偏转角度与风速和风向有关,通过测量偏转角度,可以计算出风速和风向。
3.为了实现精确测量,传感器通常采用电子陀螺仪和加速度计等高精度测量设备来辅助测量。
三、二维风速风向传感器的应用二维风速风向传感器在多个领域得到广泛应用,以下是几个典型的应用场景:1.气象监测站:二维风速风向传感器是气象监测站的重要组成部分,用于监测气象要素,如风速、风向、温度、湿度等。
这些数据对于天气预报、气候变化研究等具有重要意义。
2.空气质量监测站:空气质量监测站使用二维风速风向传感器来监测空气质量,通过测量风速和风向,可以计算出空气污染物的扩散情况,为空气质量预报提供数据支持。
3.风力发电场:在风力发电场中,二维风速风向传感器用于测量风速和风向,以优化发电机的运行效率。
通过实时监测风速和风向数据,可以确保发电机在最佳状态下运行,提高发电效率。
4.环境保护:二维风速风向传感器在环境保护领域也发挥了重要作用。
例如,在排放气体的工厂周围布置传感器,可以监测气体排放情况,为环保政策的制定提供数据支持。
四、发展趋势及挑战随着科技的不断发展,二维风速风向传感器在精度、稳定性和可靠性等方面取得了显著进步。
容量:0-50N / 0-1Nm至0-250kN / 0-2500Nm
输出:1.5-3.0mV / V
精度:<±0.1%/ RC
环保等级:IP65
减少串扰,确保最佳性能
非常适合在岩土和材料测试领域中使用
可根据您的特定应用进行定制
适用于大多数工业环境
DBBSS / TSF双轴力和扭矩传感器是一种紧凑而精确的传感器,旨在分别测量顺时针和逆时针/拉伸和压缩力下的静态扭矩和轴向载荷。
2轴力和扭矩传感器的独特设计确保将轴之间的串扰减至最小,典型值小于1%,同时在扭矩和力模式下均保持优于额定容量0.1%的出色精度。
DBBSS / TSF 2轴力和扭矩传感器系列被广泛用于岩土工程和材料测试领域,在其作为高精度分析测试设备的核心组件的同时,它的设计使其可广泛应用于其他应用需
要双轴测量的地方。
郑州沐宸自动化科技有限公司致力于力传感器及信号处理的系统工作,公
司在力传感器领域有着不断的追求。
主要有测力传感器、微型拉压力传感器、
拉杆力传感器、S型拉压力传感器、环形传感器、柱式传感器、销轴类传感器、称重类传感器、二维力传感器、三维力传感器、六维力传感器等多维力传感器、静态动态扭矩传感器、微型位移传感器、压力变送器(气压/液压传感器)、变送器/放大器、控制仪表灯,并可定制各类传感器。