大学物理上册课件:第3章功和能+习题
- 格式:ppt
- 大小:2.99 MB
- 文档页数:64
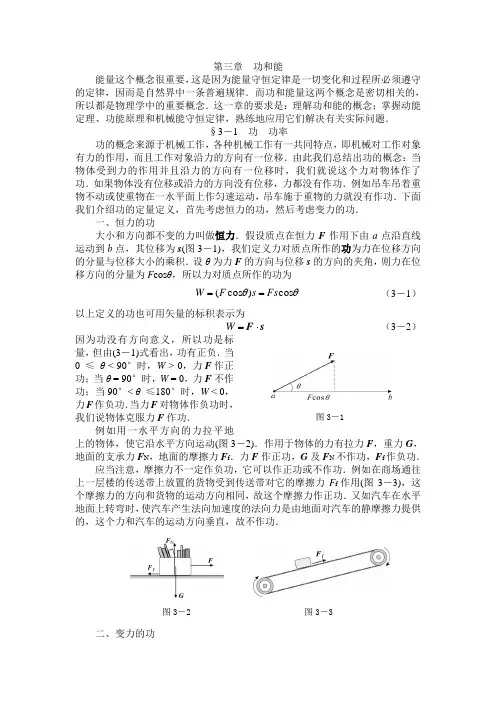
第三章 功和能能量这个概念很重要,这是因为能量守恒定律是一切变化和过程所必须遵守的定律,因而是自然界中一条普遍规律.而功和能量这两个概念是密切相关的,所以都是物理学中的重要概念.这一章的要求是:理解功和能的概念;掌握动能定理、功能原理和机械能守恒定律,熟练地应用它们解决有关实际问题.§3-1 功 功率功的概念来源于机械工作,各种机械工作有一共同特点,即机械对工作对象有力的作用,而且工作对象沿力的方向有一位移.由此我们总结出功的概念:当物体受到力的作用并且沿力的方向有一位移时,我们就说这个力对物体作了功.如果物体没有位移或沿力的方向没有位移,力都没有作功.例如吊车吊着重物不动或使重物在一水平面上作匀速运动,吊车施于重物的力就没有作功.下面我们介绍功的定量定义,首先考虑恒力的功,然后考虑变力的功.一、恒力的功大小和方向都不变的力叫做恒力.假设质点在恒力F 作用下由a 点沿直线运动到b 点,其位移为s (图3-1),我们定义力对质点所作的功为力在位移方向的分量与位移大小的乘积.设θ为力F 的方向与位移s 的方向的夹角,则力在位移方向的分量为F cos θ,所以力对质点所作的功为θθc o s )c o s (Fs s F W == (3-1) 以上定义的功也可用矢量的标积表示为s F ⋅=W (3-2)因为功没有方向意义,所以功是标量,但由(3-1)式看出,功有正负.当0 ≤ θ < 90°时,W > 0,力F 作正功;当θ = 90°时,W = 0,力F 不作功;当90°< θ ≤180°时,W < 0,力F 作负功.当力F 对物体作负功时,我们说物体克服力F 作功.例如用一水平方向的力拉平地上的物体,使它沿水平方向运动(图3-2).作用于物体的力有拉力F ,重力G ,地面的支承力F N ,地面的摩擦力F f .力F 作正功,G 及F N 不作功,F f 作负功.应当注意,摩擦力不一定作负功,它可以作正功或不作功.例如在商场通往上一层楼的传送带上放置的货物受到传送带对它的摩擦力F f 作用(图3-3),这个摩擦力的方向和货物的运动方向相同,故这个摩擦力作正功.又如汽车在水平地面上转弯时,使汽车产生法向加速度的法向力是由地面对汽车的静摩擦力提供的,这个力和汽车的运动方向垂直,故不作功.二、变力的功图3-1图3-2 图3-3在通常情况下,质点运动的轨道不是直线而是曲线,作用于质点的力也不是恒力而是变力,即力的大小和方向随质点的位置而变化,还可能与质点的速度及时间有关.如图3-4,设质点在变力F 作用下由a 点沿曲线运动到b 点,求力F 所作的功.为简单起见,假设力F 仅与质点的位置有关,是质点的位矢r 的函数,在此情形,(3-1)或(3-2)式不适用.解决的办法是将曲线ab 划分为许许多多小段,设与各小段对应的位移为Δr1,Δr 2,…,Δr i ,….当各小段充分小时,每一小段可看成一直线段,因为力F 连续地变化,质点在各小段上的各点所受的力近似地等于质点在各该小段的起始点所受的力,分别用F 1,F 2,…,F i ,…表示.按照(3-2)式,力在位移Δr i 中所作的功ΔW i 近似地等于F i 与Δr i 的标积,即i i i W r F ΔΔ⋅≈i i r F Δ⋅称为力在位移Δr i 中的元功.力F 在整个路程ab 中的功W 近似地等于在所有各小段位移中的元功之和,即∑∑⋅≈=i i i W W r F ΔΔ设λ为各小段弧长的最大值,λ越小,每一小段的弧越接近于它所对的弦(即Δr i ),质点在每一小段上各点所受的力越接近于在该小段的起始点所受的力(即F i ).因此,λ越小,在每一小段上,标积i i r F Δ⋅越接近于力在该小段中的功ΔW i ,因而和数∑⋅i i r F Δ就越接近于在整个路程中的功W .当0→λ时,和数∑⋅i i r F Δ的极限值便完全等于W 了.此极限值在积分学上称为函数F (r )沿曲线ab 的线积分,记为⎰⋅r F d ,于是得 ⎰∑⋅=⋅=→i i W r F r F d Δlim 0λ (3-3) 特殊情形(1):如果在整个路程ab 中作用力F 为恒力,则(3-3)式化为 s F r r F r F ⋅=-⋅=⋅=⎰)(d a b b a W (3-4) 其中r a 和r b 分别为a 点和b 点对原点O 的位矢,s = r b - r a 为由a 点到b 点的位移(图3-5).(3-4)式与(3-2)式相同.可见质点在恒力作用下作曲线运动时,(3-2)式仍然适用.图3-4图3-5特殊情形(2):如果力F 和位移d r 都在同一直线上,取此直线为x 轴,则F 和d r 可用x 轴上单位矢i 表示为F = F i , d r = d x i于是(3-3)式化为⎰⎰=⋅=b a x x x F x F W d )d ()(i i (3-5) 此处F 和d x 是代数量,即不论力和位移是同向或反向,上式都适用,因而具有一般性.如果令F 表示F 的大小,d s 表示d r 的大小,θ为F 与d r 之间的夹角,则(3-3)式可写为⎰⎰=⋅=abab s F W d cos d θr F (3-6) 合力的功 如果质点同时受到几个力F l ,F 2,F 3,…作用,则作用于质点的合力为F = F l + F 2 + F 3 +…合力的功为+++=+⋅+⋅+⋅=⋅=⎰⎰⎰⎰321321 d d d d W W W W abab r F r F r F r F即合力的功等于各个分力的功的代数和.功的单位和量纲 由W = Fs 得知,功的单位由F 的单位和s 的单位决定,在国际单位制中,功的单位是焦耳,符号为J .1 J 就是1N 的力使质点沿力的方向移动1 m 所作的功,功的量纲是ML 2T -2.三、功率功的概念不包含时间因素,但在生产实践中时间因素非常重要.例如有两台机器,一台机器比另一台机器可以在较短的时间完成同样多的功,显然第一台机器作功比第二台快.因此我们引入功率这个概念,它是表示作功快慢的一个物理量,数值上等于单位时间内所作的功.如果在Δt 时间内所作的功为ΔW ,则在这段时间内的平均功率为tW P ΔΔ= 当Δt →0时,即得瞬时功率:tW t W P t d d ΔΔlim 0Δ==→ 如果力F 作用在物体上使它获得速度v ,则物体消耗的功率为v v ⋅=⋅=⋅==F F r F tt t t W P d d d d d d (3-7) 其中d r 为物体在d t 时间内的位移.根据定义,功率的单位是功的单位与时间的单位之比.在国际单位制中,功率单位为焦耳每秒,称为瓦特,简称为瓦,符号为W .例题3-1 恒力F 将质量为15kg 的物体以匀速v = 5 m/s 拉上山坡,山坡的斜率为0.1,物体与山坡间的摩擦系数为0.2,求 (1) 在1 min 内作用于物体的各力所作的功;(2)合力的功;(3) 力F 的功率.解 作用于物体的力有拉力F ,重力m g ,摩擦力F f 及山坡的反作用力F N .将重力分解为分力mg sin θ及mg cos θ如图3-6,其中θ为山坡与水平面的夹角,sin θ ≈tan θ = 0.1,cos θ ≈ 1.因为物体作匀速运动,作用于物体的合力为零,故由图得mg F F mg mg F μμθ====N f N ,cosmg mg mg F )sin (sin θμθμ+=+= 在1min 内物体移动的距离为 s = 60×5 m = 300 m .(1) 力F 的功为J 230 13J 3008.915)1.02.0()sin (=⨯⨯⨯+=+=mgs W F θμ重力的功为J 410 4J 3001.08.915sin -=⨯⨯⨯-=-=s mg W m g θ摩擦力的功为J 820 8J 3008.9152.0f -=⨯⨯⨯-=-=mgs W F μ反作用力F N 的功为0N =F W(2) 合力的功为0J 0)820 8410 4230 13(N f =+--=+++=F F m g F W W W W W这个结果不经过计算也是可以预料到的,因为合力为零.(3) 力F 的功率为W 5.202 W 58.915)1.02.0()sin (=⨯⨯⨯+=+==v v mg F P θμ例题3-2 用F = 10 N 的恒力通过轻绳和轻滑轮沿光滑水平面拉动重物,如图3-7.设图中所示高度h = 2 m ,不计绳与滑轮间和轮轴处的摩擦,在将重物由位置A (绳与水平面的夹角θ = 30°)拉到位置B (绳与水平面的夹角θ = 37°)的过程中,求力F 所作的功. 解 以位置A 为原点,向右为x 轴正向取如图3-7所示的坐标轴Ax ,设由位置A 到滑轮正下方位置C 间的距离为L ,当重物移动到坐标为x 处时绳与水平面间的夹角为θ,则由几何关系可得θcot h L x -=图3-6图3-7微分得 θθθθd sin d csc d 22h h x == 重物沿水平面移动的过程中,恒力F 沿绳作用在重物上的力F 的方向随θ变化,是一变力.恒力F 对重物所作的功等于F 的水平方向分量F cos θ所作的功,则由A 到B 的过程中力F 所作的功为J 6.77J 37sin 130sin 1210 sin 1sin 1sin sin d d sin cos d cos 21222121=⎪⎭⎫ ⎝⎛︒-︒⨯⨯=⎪⎪⎭⎫ ⎝⎛-====⎰⎰⎰θθθθθθθθθθθθFh Fh Fh x F W B A§3-2 动能 动能定理能的概念和功的概念有密切联系.什么叫做能?如果一个物体能够作功,我们说它具有能或能量.能就是作功的能力或作功的本领.在本节中我们首先说明动能这一概念.根据经验,凡是运动着的物体都能够作功,例如水流(即流动的水)能够推动水磨或水车而作功,风(即流动的空气)能够推动风车、帆船而作功.所以凡是运动着的物体都具有能.物体由于运动而具有的能称为动能.物体的动能与哪些因素有关?根据动能概念,静止的物体是没有动能的,只有运动的物体才具有动能.又根据经验,物体运动速度越快,它作功的本领就越大.例如打桩机重锤下落的速度越快,它撞击水泥桩使之进入地面就越深,所作的功就越大.可见物体的速度越快,它的动能就越大.即是说物体的动能与它的速度有关.另一方面,当外力对物体作功时,物体的速度要发生变化,也就是它的动能要发生变化.由此可见,外力对物体作功与物体动能的变化有关.现在我们来研究它们之间的关系.设物体在合外力F 作用下沿一曲线由a 点运动到b 点,在a 、b 两点的速度分别为v 1及v 2,根据牛顿第二定律,曲线运动的切向运动方程为t m F d d t v = 其中F t 为合外力F 在切线方向的投影(图3-8),即 θcos t F F =又 t s d d v =合并以上三式得v v v v d d d d cos m dt tm s F ==θ 物体从a 点运动到b 点时,由(3-6)式,合外力所作的功为⎰⎰==21d d cos v v v v m s F W b a θ 即 21222121v v m m W -= (3-8) 物体的速度的平方与其质量的乘积之半2v m 21称为物体的动能,用E k 表示:图3-82v m E 21k = (3-8)式右边第一项为物体的末动能,第二项为物体的初动能,两项相减为动能的增量.(3-8)式表示,合外力对物体所作的功等于物体的动能的增量,这一结论称为动能定理.由(3-8)式看出,当合外力对物体作正功(W > 0)时,物体的末动能大于初动能,物体的动能增加.当合外力对物体作负功(W < 0)时,即物体克服外力作功时,物体的动能减少.由此可以理解,物体以一定速度运动时,它具有一定的动能,当物体克服外力作功时,就是依靠它的动能的减小来作功的.能量的单位和量纲与功相同,在国际单位制中能量的单位是焦耳,量纲是ML 2T -2.动能定理是从牛顿第二定律推出来的,它完全包含在牛顿第二定律之中,所以凡可以用动能定理解决的力学问题当然可以用牛顿第二定律来解决.但应用动能定理比直接用牛顿第二定律要方便些:应用此定理时,不管运动是直线运动或曲线运动,不管外力是恒力或变力,也不管物体运动状态变化如何复杂,只要求得在此过程中合外力所作的功,这功总是等于物体的末动能与初动能之差. 例题3-3 长为l m 的细线,上端固定,下端悬挂质量为2 kg 的小球,拉开小球使悬线与竖直方向成45°角的位置然后放手,求悬线与竖直方向成10°角时小球的速度. 解 当悬线被拉开45°角然后放手时,小球的初速度为零.小球在重力m g 及悬线的张力F T 作用下在平衡位置A 附近一圆弧上来回运动.为了应用动能定理求小球在任一位置C 时的速度,首先要计算小球从初位置B 运动到位置C 的过程中作用于小球的力所作的功.因悬线的张力F T 始终与小球的路径(圆弧)垂直,故不作功.而重力是恒力,故可应用(3-4)式计算重力的功,由图3-9得 )45cos (cos )( cos ︒-='-'=''==⋅=ϕθmg B O C O mg C B mg mgBC m W s g 因小球的初动能为零,在位置C 的动能为2v m 21,由动能定理得 )45cos (cos 21︒-=ϕmgl m 2v 或 )45cos (cos 2︒-=ϕgl v当︒=10ϕ时,m/s 33.2m/s )45cos 10(cos 1892=︒-︒⨯⨯⨯=.v§3-3 势 能不运动的物体没有动能,但它可以有其他形式的机械能——势能.例如打桩机的重锤,当它从高处落下时,能够把水泥桩打入土中而作功,瀑布的水从高处流下可以推动水轮机带动发电机发电,这些例子说明位于高处的重物具有能量,所以它能够作功.这种能量是因为物体受重力作用以及它对地球的相对位置而具有的,称为重力势能.又例如弹簧被拉伸或压缩时能带动物体作功,机械钟表的图3-9发条旋紧以后能够推动钟表机件作功,这些例子说明处于弹性形变状态的物体也具有能量,因而能够作功.这种能量是因为弹性体的各部分间有弹性力作用以及各部分间的相对位置而具有的,称为弹性势能.一般地说,由若干个物体组成的系统,由于系统中各物体间的相互作用以及相对位置而具有的能量统称为势能.所以势能有各种形式,除重力势能及弹性势能外,还有引力势能、静电势能、分子间的势能等.从本质上来说,我们之所以能够引入各种势能概念,是因为有关的相互作用力具有某种特性,所以在引入每一种势能之前我们先介绍有关特性.一、重力的功及重力的特性在以上两节中我们已就某些特例计算过重力的功,这一节将就一般情形计算重力的功,并说明其特性.假设物体在重力m g 作用下,由a 点沿曲线运动到b 点(图3-10),由于在地球表面附近重力可以看成是恒力,故可用(3-4)式计算重力的功.令s 表示由a 点到b 点的位移,由(3-4)式得重力的功:θcos mgab m W =⋅=s g (3-9)其中θ为重力m g 与位移s 之间的夹角.如果令h 表示a 、b 两点间的高度差,则h ab =θcos ,故由(3-9)式得重力的功为 mgh W = (3-10)如果取物体运动所在的平面为xy 平面.x 轴在水平方向,y 轴竖直向上,又令y a 及y b 分别为a 点及b 点的y 坐标,则(3-10)式可写为b a b a mgy mgy y y mg W -=-=)( (3-11)由(3-11)式可以得出重力的重要特性,即重力的功仅与物体的初末位置有关,与所经过的路径无关.如果物体沿另一路径adb 由a 点运动到b 点,则因物体的位移仍为s ,故重力的功仍由(3-11)式表示.现在再来计算物体沿任意闭合路径acbda 运动一周时重力所作的功:bda acb acbda W W W +=因 a c bbda W m m W -=⋅-=-⋅=s g s g )( 所以 0=+=b d a a c b a c b d a W W W故重力的特性亦可表述如下:物体在重力场中沿任意闭合路径运动一周时,重力所作的功为零.二、重力势能由(3-11)式,当物体由a 点运动到b 点时,重力的功为b a ab mgy mgy W -= (3-12)图3-10此功等于两项之差,第一项仅与a 点位置有关,第二项仅与b 点位置有关.因此我们可以把这功定义为物体在a 点和b 点这两个位置的重力势能之差.设E p 表示重力势能,E p a 、E p b 分别表示物体在a 点和b 点时的重力势能,则b a ab E E W p p -= (3-13)从上式看出,重力的功等于重力势能的增量的负值)(p p a b E E --,当重力作正功时(W ab > 0),物体的重力势能减少(E p b < E p a );当重力作负功时,物体的重力势能增加.(3-13)式确定了物体在这两个位置的重力势能之差.为了确定物体在某一位置的重力势能,必须取定重力势能的零点,通常取地面为重力势能零点,即E p 地 = 0.由(3-13)式得a a a E E E W p p p =-=地地 (3-14)即如果取地面为重力势能零点,则物体在a 点的重力势能E p a 等于物体从a 点移到地面时重力所作的功(W a 地).这样,如果a 点距地面的高度为h ,则质点在a 点的重力势能为mgh E a =p (3-15)应当指出:(1) 物体在两个位置的重力势能之差有绝对意义,但物体在某一位置的重力势能只有相对意义.从(3-13)式看出,物体在两个位置的重力势能之差等于物体从一个位置移到另一个位置时重力所作的功,因为这个功与路径无关,仅与初末位置有关,所以物体的重力势能之差有绝对意义.但物体在某一位置的重力势能只有相对意义,因为这个势能的值实际上指的是物体在该位置的重力势能与在势能零点的重力势能之差,而势能零点的选取是有随意性的,相对于不同的势能零点,物体在同一点的重力势能就有不同的值.(2) 重力势能属于质点与地球所组成的系统.物体之所以具有重力势能是由于受重力作用的结果.如果没有地球,便没有重力,就谈不上重力势能.所以重力势能属于物体与地球所组成的系统.平常说“物体的重力势能”只是习惯上简便的说法.三、保守力和非保守力 一般势能概念以上讨论了重力的特性,但不只是重力才具有这种特性,除重力外,还有许多种力也具有这种特性,这一类型的力统称为保守力.其定义如下:如果一个力使物体从一点移至另一点所作的功仅与物体的初末位置有关,与路径无关,则此力称为保守力.另一个等价的定义是:如果对沿任意闭合路径运动一周的物体一个力所作的功为零,则此力称为保守力.除重力外,弹性力、万有引力、静电力等都是保守力.反之,如果一个力的功与路径有关,或沿一闭合路径的功不为零,则此力称为非保守力.例如摩擦力就是非保守力,因为摩擦力沿一闭合路径的功不为零.汽车的牵引力也是非保守力,因为当汽车沿一闭合路径回到原位置时,汽车的牵引力总是作正功.我们从上面已经看到,重力的功等于两项的差.从保守力定义出发,我们可以证明任何保守力的功都等于两项的差,第一项仅与物体的初位置有关,第二项仅与物体的末位置有关(这可以从下面弹性力的功以及万有引力的功的表示式看出,这里不作一般证明).因此,正如我们可以引入重力势能概念一样,对任何保守力我们都可以引入势能概念.设W ab 为物体从位置a 移至位置b 时保守力所作的功,我们把这个功定义为物体在这两个位置的势能之差.设E p a 、E p b 分别表示物体在位置a 和位置b 的势能,对任何保守力均有如下关系:)(p p p p a b b a ab E E E E W --=-= (3-16)即保守力所作的功等于势能的增量的负值.正如重力势能一样,任何形式的势能都是相对的,为了确定物体在某一位置的势能,必须取定势能的零点.物体在某一位置的势能就等于物体从这个位置移至势能零点时保守力所作的功.与重力势能属于物体和地球所组成的系统一样,任何形式的势能都属于由相互作用的物体组成的系统.四、弹性力的功 弹性势能将弹簧一端固定,另一端连接一物体,让物体在一光滑水平面上沿左右方向运动(图3-11).这一系统称为弹簧振子.设O 为弹簧未发生形变时物体的位置,称为物体的平衡位置.取坐标轴Ox ,物体的平衡位置O 为原点,x 轴正向向右.当物体有一向右或向左位移x 时,弹簧的形变量亦为x .按照胡克定律,在弹性限度内.弹簧施于物体的弹性力F 与弹簧的形变量x 成正比:F = - kx其中k 为弹簧的劲度系数,“-”号表示力的方向与位移方向相反.当位移向右时,力的方向向左;当位移向左时,力的方向向右.应当指出,(2-8)式F = kx 中的x 表示弹簧形变量的大小,总为正值.此处的x 表示物体位移的代数量,可以为正或为负.弹簧形变量与物体位移的关系如上所述.设a 、b 为物体的两个位置,其坐标分别为x a 和x b ,现在来计算当物体由位置a 移到位置b 时弹性力所作的功.因弹性力是变力,物体在变力作用下作直线运动,故可用(3-5)式进行计算.在现在情形F = - kx ,代入(3-5)式得弹性力的功:⎪⎭⎫ ⎝⎛--=-==⎰⎰222121d d a b x x x x kx kx x kx x F W b a b a (3-17) 此功与物体从a 移到b 的方式无关,例如它可以从a 先向右移,然后向左移到b ;也可以从a 直接移到b .不论怎样从a 移到b ,弹性力的功都由上式表示.由此可见,弹性力的功仅与物体的初末位置有关,与物体经过的路径无关.所以弹性力是保守力.弹性力既然是保守力,我们可以引入势能概念.这种势能称为弹性势能.为了确定物体的弹性势能,必须取定弹性势能零点.通常取弹簧无形变时物体的位置(即x = 0)为弹性势能零点.这样,物体在任意位置x 的弹性势能就等于物体从这个位置移到x = 0时弹性力所作的功,即图3-1120p 21d kx x kx E x =-=⎰ (3-18) 根据这一定义,(3-17)式表示弹性力的功等于弹性势能的增量的负值.五、万有引力的功 引力势能设质量为m 的质点在质量为m ’的质点的引力场中运动(图3-12),并设m ’远大于m .在这种情况下,可认为质点m ’静止在一点O .设r 为质点m 对O 点的位矢,则由万有引力定律,m ’对m 的引力为 r F 30rm m G '-= 当质点m 从a 点沿一曲线运动到b点时,引力F 所作的功为 ⎰⎰⋅'-=⋅=b a b a r r r r rm m G W r r r F d d 30 (3-19) 由于 2r =⋅r r两边微分, r r d 2d 2=⋅r r代入(3-19)式得⎪⎪⎭⎫ ⎝⎛-'=⋅'-=⎰a b r r r r m m G r m m G W ba 11d 030r r (3-20) 其中r a 和rb 分别为a 、b 两点到O 点的距离.由此可见,万有引力所作的功仅与运动质点的初末位置有关,与路径无关,所以万有引力是保守力.万有引力既然是保守力,我们可以引入势能概念,这种势能称为引力势能.为了确定质点m 在任一位置的引力势能,必须取定引力势能的零点.通常取无穷远点为势能零点.这样,质点m 在任一点r 的引力势能就等于m 从该点移到无穷远时万有引力所作的功,用E p 表示:rm m G r r m m G E r 1d 020p '-='-=⎰∞ (3-21) 根据这一定义,(3—20)式表示万有引力的功等于引力势能的增量的负值.利用该式可以推出以地面为重力势能零点时物体在距地面高度为h 处的重力势能的表达式(参看习题3—21).§3—4 功能原理 机械能守恒定律一、物体系的动能定理在§3-2中我们已经介绍过单个物体的动能定理,现将这一定理推广到由若干个物体组成的系统.作用于系统中某一物体的力有外力和内力,外力是系统外的物体施于该物体的力,内力是系统内其他物体施于该物体的力.取系统中第i 个物体来考虑,设其质量为m i ,在外力及内力作用下,在一段时间内,其速度图3-12由v i 0变为v i ,又设在这段时间内作用于此物体的外力及内力所作的功分别为)(i W 外及)(i W 内,则由单个物体的动能定理得,3,2,1 , 2121202)()(=-=+i m m W W i i i i i i v v 内外 将上式对系统内所有物体求和,得∑∑∑∑-=+i i i i i i i i i i m m W W 202)()(2121v v 内外 (3-22) 上式右端第一项为物体系中所有物体的末动能之和,第二项为物体系中所有物体的初动能之和,分别称为物体系的末动能和初动能,两项相减为物体系的动能的增量.上式表示作用于物体系的一切外力及内力所作的功的代数和等于物体系的动能的增量,这就是物体系的动能定理.二、功能原理作用于物体系的力可分为外力和内力,内力又可以分为保守内力和非保守内力.因此,内力的功∑ii W )(内等于所有保守内力的功W 保内及非保守内力的功W 非保内之和:非保内保内内W W Wi i +=∑)(又将∑i i W )(外写为外外W W i i =∑)(将物体系的初动能和末动能分别写为E k1及E k2,则(3-22)式化为1k 2k E E W W W -=++非保内保内外 (3-23)根据上节(3-16)式,保守内力所做的功等于势能增量的负值,即)(1p 2p E E W --=保内 (3-24)将(3-24)式代入(3-23)式并移项得)()(1p 1k 2p 2k E E E E W W +-+=+非保内外 (3-25)上式中E k + E p 为物体系的动能与势能之和,称为物体系的机械能.上式表示外力的功与非保守内力的功之和等于物体系的机械能的增量.这一结论称为功能原理.功和能量这两个概念是密切联系着的,但又是有区别的.从功能原理看出,功总是和能量变化的过程相联系,功是能量变化的量度,所以功是一个过程量.而能量则是一个状态量,完全决定于物体系的状态.为什么这样说呢?在力学中物体系的运动状态是用物体系的位置和速度来描述的,物体系的动能是由运动物体的速度单值地决定的;物体系的势能是由物体系中各物体的相对位置单值地决定的.因此物体系的机械能完全由它的状态决定,是物体系的状态的单值函数.其他形式的能量也是这样.三、机械能守恒定律机械能守恒定律是功能原理的特殊情形,因而可以从后者推出.如果物体系没有受外力及非保守内力作用或外力与非保守内力所作的功均为零,则(3-25)式左端为零,于是该式化为1p 1k 2p 2k E E E E +=+ (3-26)上式右端是物体系的初状态的机械能,左端是末状态的机械能,但物体系的初末状态是任意选定的,因此上式表示物体系的任意两个状态的机械能都相等.或者说,任一状态的机械能都等于初状态的机械能,因而等于一常量.故得结论:如果物体系没有受外力及非保守内力作用或外力与非保守内力所作的功均为零,则物体系的动能与势能可以互相转换,但它们的总和保持不变.这一结论称为机械能守恒定律.应用此定律时首先要考虑定律适用的条件:作用于物体系的外力及非保守内力所作的功均为零.如果这个条件满足了,物体系的机械能守恒.如果某一保守力不作功,由(3-24)式看出,它不引起相关势能变化.这样,功能原理或机械能守恒定律中的物体系可以不包括这样的保守力的施力物体.此外,在常见的力学问题中,保守力的施力物体的动能往往都等于零.例如弹簧的质量可以忽略,其动能可视为零;又如通常取地球为参考系(即从地球上的人看来),其动能亦为零.于是,在功能原理或机械能守恒定律的表示式中可以不含有类似的保守力施力物体的动能.应用功能原理或机械能守恒定律解题可按如下步骤进行:(1) 取定研究对象——物体系,使问题中的运动物体以及引起其势能变化的保守力的施力物体均包括在物体系内;(2) 分析物体系中各运动物体的受力情况,注意外力是否作功,内力是否为保守力,非保守内力是否作功.如果外力及非保守内力所作的功均为零,则系统的机械能守恒;(3) 取定势能零点,计算物体系初末位置的机械能;(4) 根据功能原理或机械能守恒定律列方程;(5) 解方程求出待求量,有时还要与其他方程联立求解.功能原理是由动能定理推出的,因而完全包含在动能定理之中,凡是可以用功能原理求解的力学问题都可以用动能定理求解.应用功能原理时,只须计算外力及非保守内力的功,因为保守内力的功已包含在势能中,如果再计入保守内力的功就属重复运算了.应用动能定理时,既要计算外力及非保守内力的功,又要计算保守内力的功.读者可以用动能定理自行求解下述例题.例题3-4 有一弹簧振子放在水平桌面上如图3-13.物体的质量m = 0.1 kg ,弹簧的劲度系数k = 20 N/m ,物体与桌面的摩擦系数μ = 0.2,当物体m 在平衡位置O 时,给以向右的速度v 0,结果物体有一向右的最大位移x 0 = 0.05 m .(1) 求v 0的值;(2) 物体走过路程x = 0.03 m 时它的速度是多少?解 取物体与弹簧组成的系统为研究对象.由于保守力重力不作功,即不引起其势能变化,故不把重力的施力物体——地球包括在物体系内,作用于物体的力有① 弹簧的弹性力F = -kx ,这个力是保守内力;② 桌面的摩擦力F f ;③ 重力mg ;④ 水平桌面的支承力F N .后面三个力是外力.因物体在竖直方向没有运动,F N = mg ,所以F f = μF N = μmg .图3-13。

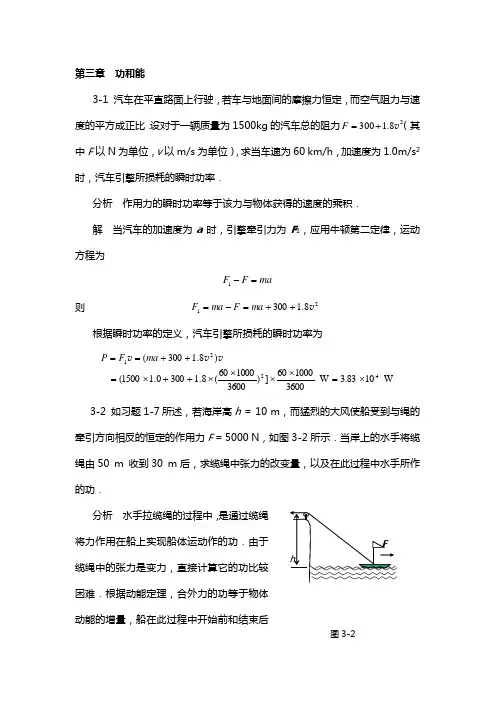
第三章 功和能3-1 汽车在平直路面上行驶,若车与地面间的摩擦力恒定,而空气阻力与速度的平方成正比.设对于一辆质量为1500kg 的汽车总的阻力281300v .+=F (其中F 以N 为单位,v 以m/s 为单位),求当车速为60 km/h ,加速度为1.0m/s 2时,汽车引擎所损耗的瞬时功率.分析 作用力的瞬时功率等于该力与物体获得的速度的乘积.解 当汽车的加速度为a 时,引擎牵引力为F 1,应用牛顿第二定律,运动方程为ma F F =-1则 2181300v .++=-=ma F ma F根据瞬时功率的定义,汽车引擎所损耗的瞬时功率为W 103.83 W 3600100060360010006081300011500 813004221⨯=⨯⨯⨯⨯++⨯=++==])(..().(v v v ma F P 3-2 如习题1-7所述,若海岸高h = 10 m ,而猛烈的大风使船受到与绳的牵引方向相反的恒定的作用力F = 5000 N ,如图3-2所示.当岸上的水手将缆绳由50 m 收到30 m 后,求缆绳中张力的改变量,以及在此过程中水手所作的功.分析 水手拉缆绳的过程中,是通过缆绳将力作用在船上实现船体运动作的功.由于缆绳中的张力是变力,直接计算它的功比较困难.根据动能定理,合外力的功等于物体动能的增量,船在此过程中开始前和结束后图3-2都保持静止,船只在水平方向发生位移,水平方向只受缆绳张力水平分量和恒定阻力F 作用,则水手通过缆绳张力所作的功的量值应等于恒力F 所作的负功.解 缆绳长度由l 1=50 m 收到l 2=30 m 的过程中,位移为s ,水手作的功为J101.035J 103010505000 52222222221⨯=---⨯=---==()(h l h l F Fs W 设此过程中开始前缆绳张力为F T1、结束后为F T2,它们的水平方向分量都应与恒力F 等大而反向,因此有F l h l F =-1221T1 F l h l F =-2222T2则N 200N 1050501030305000 222222112222T1T2=⎪⎪⎭⎫ ⎝⎛---⨯=⎪⎪⎭⎫ ⎝⎛---=-h l l h l l F F F 3-3 质点沿x 轴运动,由x 1 = 0处移动到x 2 = 4 m 的过程中,受到力)1(00-=x x F F 的作用,其中x 0 = 2 m ,F 0 = 8 N ,作出F -x 曲线,求在此期间力F 对质点所作的功. 分析 当质点沿x 轴作直线运动时,如果外力是质点位置坐标x 的函数)(x F F =,质点从位置x 1运动到x 2的过程中,根据功的定义,该力所作的功为⎰=21d x x x x F W )(,即为F -x 图像中x 1到x 2区间曲线)(x F 与x 轴线包围面积的代数和.图3-3解 根据题意,F -x 曲线如图3-3所示.按照功的定义,有0J 42248 2d 1d 220220002121=-⨯⨯=-=-==⎰⎰)()()()(x x x F x x x F x x F W x x x x由图3-3可见,x 1到x 2区间曲线)(x F 与x 轴线包围面积的代数和为零,与上面的计算结果一致.3-4 在x 轴线上运动的物体速度为v = 4 t 2 + 6(其中v 以m/s 为单位,t 以s 为单位),作用力3-=t F (其中F 以N 为单位,t 以s 为单位)沿x 轴正向.试求在t 1 = 1 s 和t 2 = 5 s 期间,力F 对物体所作的功.分析 当质点沿x 轴作直线运动时,如果外力是时间t 的函数)(t F F =,根据功的定义⎰=21d x x x x F W )(,无法直接积分计算,通常可利用微分关系式t t tx x d d d d d v ==,将积分变量转换为时间t 进行计算.积分变量代换后,积分的上下限也要作相应的代换.解 根据功的定义[]J 921834d 186124 d 643d d 2121212121234232=-+-=-+-=+-===⎰⎰⎰⎰t t t t t t t t x x t t t t t t t t t t t t t F x t F W )())(()()(v3-5 在光滑的水平桌面上固定有如图3-5(a)所示的半圆形屏障,质量为m 的滑块以初速v 0沿屏障一端的切线方向进入屏障内,滑块与屏障间的摩擦系数为μ,(1)证明当滑块从屏障另一端滑出时,摩擦力对它所作的功为)(1e 2120-=-μπv m W ;(2)说明上述结果为什么与圆弧半径无关.分析 当外力无法表示成位移的函数时,功就不能直接由定义式积分进行计算.如果能确定物体初末状态的速度,可以应用动能定理,求出物体动能的增量就等于合外力对物体所作的功. 证 (1)首先应计算出滑块从屏障另一端滑出时的速度.设滑块在屏障中位于如图3-5(b)所示的位置,在竖直方向无运动,在水平面内受到屏障压力F N 和摩擦力F f 作用,此时速度为v ,设屏障半径为R ,应用牛顿第二定律所得运动方程为法向: R v 2m F =N 切向: tm F d d f v =- 由于F f =μF N ,得 Rt 2d d v v μ-= 利用关系式θθθd d d d d d d d v v v v R t t ==,上式可写为 v v μθ-=d d (1) 由初末条件:当0=θ时,0v v =;当πθ=时,v v =,将上式分离变量并积分:⎰⎰-=πθμ0d d 0vv v v (2) 得滑块从屏障另一端滑出时的速度为μπ-=e 0v v (3)则摩擦力在此期间所作的功为F f(a ) (b )图3-5)(1e 212121220202-=-=-μπv v v m m m W (2)由(1)和(2)式可以看出,当滑块发生角位移θd 时,速度的变化只与角位移θd 有关,与半径无关,因此(3)式给出的末速度也只与半圆的张角有关,这就导致最终结果与圆弧半径无关了.3-6 一个质点在指向中心的平方反比力2r k F /=的作用下,作半径为r 的圆周运动,求质点运动的速率和总机械能.(提示:选取距力心无穷远点的势能为零.)分析 与物体间距离平方成反比的力是自然界中普遍存在的一种力,例如万有引力和电荷间的库仑力.如果该力指向中心,计算势能时,从空间任意一点到势能零点(无穷远点)积分的路径方向与力的作用方向相反,积分表达式的矢量乘积变为标量乘积后要取负号.解 质点只在指向中心的力2r k F /=的作用下作圆周运动,当速率为v 时,法向加速度为r /2v ,则质点的法向运动方程为rm r k 22v = 得 mr k =v 选取距力心无穷远为势能零点,则势能为rk r r k E r r -=-=⋅=⎰⎰∞∞d d 2p r F 总机械能为rk r k r k r k m E E E 22212p k -=-=-=+=v 3-7 在力)(j i F y x k +=的作用下,质点在xy 平面内运动,(1)分别计算质点由原点O 经路径OBA 和路径OA 移动到达A 点该力所作的功,其中AB 是以O 为圆心R 为半径的一段圆弧,如图3-7(a )所示;(2)计算沿任意路径由位置P (x 1 , y 1)到Q (x 2 , y 2)该力所作的功,并由此证明该力是保守力.分析解 (1)根据功的定义,经路径OBA 该力所作的功为⎰⎰⎰⋅+⋅=⋅=BAOB OBA W s F s F s F d d d 1 由于力r j i F k y x k =+=)(,即沿原点指向质点所在位置的方向,所以有r F s F d d ⋅=⋅.从图3-7(a )可以看出,在路径OB 上,力的方向与位移方向相同x kx d d =⋅r F ;在路径BA 上,力的方向与位移方向垂直,0d d =⋅=⋅r F s F ,因此可得20121d d d d kR x kx x kx W R OB BA OB ===⋅+⋅=⎰⎰⎰⎰s F s F 同理,经路径OA 该力所作的功为20121d d d d kR r kr k W R OA OA OA ==⋅=⋅=⋅=⎰⎰⎰⎰r r r F s F (2)P 点的径矢大小为r 1,Q 点的径矢大小为r 2,则212121y x r +=,222222y x r +=.取任意路径L 如图3-7(b )所示,则)]()[()(2122212221222121 d d d 21y y x x k r r k r kr W r r L L -+-=-==⋅=⋅=⎰⎰⎰r F s Fθ r 2O OB x x(a ) (b )图3-7结果表明,沿任意路径力F 所作的功与路径无关,只与P 点和Q 点的位置有关,表明力F 为保守力.3-8 沿x 轴运动的某粒子的势能是其位置x 的函数x B x A x U -=2)( 据此所作的势能曲线如图3-8所示.(1)试求粒子势能最小值所对应的运动的平衡位置;(2)当粒子的总能量AB E 82-=时,粒子将被约束在一定范围内振动,求粒子往返运动的转折位置.分析 n m xB x A x U -=)(是粒子物理、固体物理和材料科学中描述粒子间相互作用经常出现的势能函数,对它的研究和讨论有十分重要的实际意义.这里仅就最简单的情况,即12==n m ,进行分析,获得粒子运动状态的初步印象.当粒子的能量比较小时,将在平衡位置附近作简谐振动,因此平衡位置和往返运动的转折位置就有重要意义. 解 (1)由0d d =x x U )(可得势能函数最小值的位置,即 02d d 23=+-=x B x A x x U )( 解得 B A x 2= (2)在往返运动的转折点处,粒子的速度为零,即动能为零,总能量应等于粒子的势能,即AB x B x A x U 822-=-=)( 可得 088222=+-A ABx x B解得 B A x 1711.= BA x 8362.=图3-83-9 马拉雪橇上坡,从坡底到坡顶是一段半径为R 弧长为6π的圆弧形山坡.假设马的拉力始终沿圆弧的切线方向,雪橇的质量为m ,雪橇与雪地间的滑动摩擦系数为μ,求在这段路程中马所作的功. 分析 在物体运动过程中,有摩擦力等非保守力存在时,应用功能原理计算外力的功比较便捷,外力和非保守内力的功等于物体系机械能的增量. 解 以雪橇为研究对象,受力情况如图3-9所示,如果始末时刻雪橇为静止状态,在上坡过程中,马的拉力的功和摩擦阻力的负功之和等于雪橇重力势能的增量.由于此过程雪橇高度的增加为)cos (61π-R ,因此重力势能的增量为)cos (61π-mgR .当雪橇所在位置的法线方向与竖直方向夹角为θ时,摩擦力θμμcos mg F F ==N f ,位移θd d R s =,应用功能原理,马的拉力的功为)cos sin ()cos (cos 661 61d d 06f ππμπθθμπ-+=-+=⋅=⎰⎰mgR mgR mgR W s F3-10 用m /s 200=v 的初速度将一质量为kg 50.=m 的物体竖直上抛,所达到的高度是m 16=h ,求空气对它的平均阻力.分析 物体所受到的空气阻力是外力,重力是物体和地球组成的系统的内力,根据功能原理,空气阻力所作的功应等于系统机械能的增量.应在选取了势能零点后,确定系统的初末状态的机械能,计算出系统机械能的增量.解 取物体抛出点为重力势能零点,则物体初始机械能为20121v m E =,达最高点时机械能为mgh E =2,设空气对它的平均阻力为F ,应用功能原理得F fR图3-92021v m mgh Fh -=- 则 N 1.35N 8916220502220=-⨯⨯=-=).(.)(g h m F v 3-11 质量分别为m 1、m 2的二物体与劲度系数为k 的弹簧连接成如图3-11(a )所示的系统,物体m 1放置在光滑桌面上,忽略绳与滑轮的质量及摩擦.当物体达到平衡后,将m 2往下拉h 距离后放手,求物体m 1、m 2运动的最大速率.分析 应用机械能守恒定律解力学问题时,系统的选取十分重要.选定系统后,要区分内力和外力、保守力和非保守力以及作功的力和不作功的力.仅当外力和非保守内力所作的功均为零时,才能应用机械能守恒定律.本题中m 1、m 2二物体连接在一起,位移大小、速率和加速度的大小都相同.忽略绳与滑轮的质量及摩擦的情况下,张力F T 和F ’T 为一对内力,大小相等,方向分别与物体运动方向相同和相反,因此系统运动过程中二力的功之和为零.解 以弹簧与二物体组成的弹性系统以及物体与地球组成的重力系统为研究对象,二物体受力情况如图3-11(b )所示.在系统运动过程中,因张力F T 和F ’T 所作功之和为零,只有作用在m 2上的重力及作用在m 1上的弹簧弹性力作功,系统机械能守恒.取竖直向下为x 轴正向,系统平衡时m 2的位置为坐标原点,设此时弹簧的伸长量为l 0,根据胡克定律,弹簧的弹性力大小为0kl F =.由于系统处于平衡’Tm 2 m 1gm 2g x(a ) (b )图3-11状态,应有0T 2='-F g m ,0T =-F F ,且因T TF F =',则 002=-kl g m (1)取m 2的平衡位置为重力势能零点,初始时,m 2向下位移h ,重力势能为gh m 2-,弹簧伸长量为)(h l +0,弹性势能为2021)(h l k +,则系统机械能为 gh m h l k E 220121-+=)( (2) 当m 2处于x 位置时,设速率为v ,则系统总动能为22121v )(m m +,重力势能为gx m 2-,弹簧伸长量为)(x l +0,弹性势能为2021)(x l k +,则系统机械能为 2212202121v )()(m m gx m x l k E ++-+= (3) 应用机械能守恒定律,1E E =,由(1)、(2)和(3)式得)(22212x h m m k -+=v 显然0=x 时有最大值 212max m m kh +=v 3-12 用弹簧将质量分别为m 1和m 2的两块木板连接起来,必须加多大的力F 压到上面的板m 1上,以便当突然撤去F 时,上面的板跳起来能使下面的板也刚好被提离地面.分析 对于弹簧连接的两块木板组成的系统,初始时有外力作用,运动过程中m 2还受到地面的压力,弹簧的弹性力是变力,两块木板之间有相对运动,应用牛顿定律解这样的问题显得相当复杂.考虑到撤去外力F 后,作用于系统的力除作为保守力的重力和弹簧的弹性力外,只有地面的压力.根据题意,下面的板刚好被提离地面,表明其处于与地面接触的临界状态,实际并没有离开地面,也就是说没有发生位移,那么地面的压力就没有作功.于是,撤去外力F 后,只有重力和弹簧的弹性力作功,系统机械能守恒.解 以如图3-12(a )所示的弹簧连接的两块木板组成的弹性系统、以及和地球组成的重力系统为研究对象,两块木板的处于始末状态和受力情况分别如图3-12(b )和(c )所示.初刻,弹簧压缩形变量为x 1,弹性势能为2121kx ,设此时系统重力势能为零,系统机械能为21121kx E =下面的板刚好被提离地面时,弹簧伸长形变量为x 2,弹性势能为2221kx ,重力势能为)(211x x g m +,系统机械能为22211221kx x x g m E ++=)( 机械能守恒21E E =,得22211212121kx x x g m kx ++=)( 即 )()(211222121x x g m x x k +=- 两边同除以21x x +,得 g m x x k 12121=-)( (1) 初始时,由图3-12(b )可见,m 1处于平衡状态,因11kx F =,则有011=-+kx g m F (2)F 2 m 2 m 1g 2m 2g(a ) (b ) (c )图3-12m 2刚好被提离地面时,由图3-12(c )可见,地面压力为零,m 2处于平衡状态,因222kx F F ='=,则有022=-kx g m (3)(2)式减去(3)式得 )(2112x x k g m g m F -+-=将(1)式代入上式,得g m m F )(21+=3-13 质量m 的小球从光滑的轨道下滑,然后进入半径为R 的圆形轨道,开始下滑时,小球的高度R H 2=,如图3-13(a )所示.求:(1)小球在什么位置脱离圆轨道;(2)小球脱离圆轨道之后,能达到的最大高度;(3)经过高度为R 的A 点时,小球对轨道的压力.分析 当物体在光滑表面上运动时,支承面对物体的压力不作功,系统机械能守恒.在曲线形轨道上运动时,轨道的压力和重力的法向分量使物体产生法向加速度.物体脱离轨道的瞬间,轨道的压力为零,只有重力的法向分量使物体产生法向加速度.解 (1)小球在轨道上某点C 受力情况如图3-13(b )所示,此时速度为A(a ) (b )图3-13C v ,则法向运动方程为R m mg F 2N Cv =+θsin (1)如果就在C 点脱离圆轨道,0N =F ,由上式得θsin gR =2C v (2)小球运动过程中轨道压力方向始终与运动方向垂直,不作功,只有重力作功,机械能守恒.取轨道最低点为重力势能零点,初始时小球势能为R mg 2,到达C点时高度为)sin (θ+=1R h ,势能为mgh ,动能为2C 21v m ,由机械能守恒定律得 2C 212v m mgh mgR += (3) 由(2)和(3)式,且)sin (θ+=1R h ,解得R h 35=(4) (2)小球离开轨道后作抛体运动,水平方向速度不变,等于C 点速度的水平分量θsin C v .最高点高度为max h ,重力势能为max mgh ,动能为θ22C 21sin v m ,应用机械能守恒定律,得θ22C max 212sin v m mgh mgR += (5) 由(2)、(3)、(4)和(5)式,解得R R h 8512750max .==(3)位于A 点时,0=θ,由(1)式得Rm F 2A N v = 应用机械能守恒定律,得2A 212v m mgR mgR += 从以上两式得 mg F 2N =3-14 劲度系数为N/m 10013⨯.的弹簧,水平放置,其一端固定在墙上,另一端被质量为8 kg 的物体压缩,当弹簧形变量为15 cm 时,将物体释放,在弹簧的作用下,物体水平射出,物体和平面间摩擦力为5 N ,(1)求弹簧恢复原长时,物体的速度;(2)若弹簧恢复原长后,物体和弹簧就脱离接触,求物体此后能跑多远.分析 根据受力和各作用力作功的不同情况,将运动过程分阶段讨论,可以分别应用动能定理和功能原理求解.解 (1)取物体与弹簧组成的弹性系统为研究对象,在弹簧恢复原长的过程中,重力和平面支承力不作功,摩擦力f F 作负功,弹簧的弹性力是保守力,根据功能原理,摩擦力所作的功应等于系统机械能的增量.初始时,弹簧被压缩量m 150.=x ,弹性势能为221kx ;弹簧恢复原长时,速度为v ,动能为221v m ,则有 22f 2121kx m x F -=-v 得m/s 1.62m/s 15052150100181 2123f 2=⨯⨯-⨯⨯⨯=-=)...((x F kx m v(2)物体和弹簧脱离后,在摩擦力作用下作减速运动,设此后位移为s ,应用动能定理,摩擦力所作的功应等于物体动能的增量,则2f 210v m s F -=- 得 m 12m 52621822f 2..=⨯⨯==F m s v3-15 如图3-15所示,自动卸料车重量为G 2,连同料重为G 1,它从静止开始沿着与水平方向成︒30角的斜面下滑,滑到底端时与一呈自然长度的轻弹簧相碰,当弹簧压缩量达最大时,卸料车自动翻斗卸料,然后因弹簧的弹性力作用,料车反弹沿斜面回到原有高度.设车与斜面间的摩擦力为车重的0.25倍,求21G 的值. 分析 由于卸料车下滑与返回过程的受力情况不同,应分两阶段分析讨论.因为整个过程中除摩擦力外,没有其他的非保守力和外力作功,所以可以应用功能原理求解.解 以卸料车与弹簧和地球组成的弹性和重力系统为研究对象.在下滑阶段,料车载重,设料车行程的高差为h ,弹簧最大压缩量为l ∆,取斜面顶端为重力势能零点,则重力势能增量为h G 1-,弹簧弹性势能增量为221)(l k ∆,摩擦力1f 250G F .=作功为︒-302501sin .h G ,应用功能原理,得 2112130250)(sin .l k h G h G ∆+-=︒- 在料车返回过程中,重力势能增量为h G 2,弹簧弹性势能增量为221)(l k ∆-,摩擦力2f 250G F .=作功为︒-302501sin .h G ,应用功能原理,得 2222130250)(sin .l k h G h G ∆-=︒- 由以上两式可得3250302503021=-︒+︒=.sin .sin G G 3-16 如图3-16所示,滑块置于一竖直轻弹簧上,弹簧原长为R ,用力使弹簧压缩到R/2时释放,则滑块恰好能通过上方光滑的1/4圆弧形轨道,并由︒30图3-15A 点抛出.(1)求弹簧的劲度系数;(2)求滑块落到地面时的水平位置.分析 在滑块离开轨道之前,由于轨道光滑,除重力和弹簧的弹性力外无其他力作功,可以应用机械能守恒定律.滑块离开轨道后,作平抛运动,运用运动学中的公式求解.在竖直光滑圆形轨道上运动的物体,只受重力和轨道压力作用,当物体刚好能通过圆形轨道顶端,表明在顶点时轨道压力为零,物体圆周运动的法向加速度只由重力产生.解 (1)取地面为重力势能零点,当弹簧被压缩时,弹性势能为2221⎪⎭⎫ ⎝⎛R k ,重力势能为mgR 21,到达A 点时,重力势能为mgR 2,速度为v ,动能为221v m ,应用机械能守恒定律得2221221221v m mgR mgR R k +=+⎪⎭⎫ ⎝⎛ (1) 根据题意,在A 点的运动方程为 R m mg 2v = (2)由以上两式得 R mg k 16= (2)滑块脱离A 点后作平抛运动,竖直方向下落距离为2R ,水平运动距离为s ,则有R gt 2212= t s v = 再利用(2)式,得 R s 2=3-17 劲度系数为k 原长为R 的弹簧一端固定在竖立的半径为R 的大圆环的顶点A ,弹簧另一端连接一环形重物由位置B 释放,在重力的作用下重物A图3-16向下滑移,如图所示,到达最低点C 时的速度刚好为零,如果忽略重物与大圆环之间的摩擦,求重物的质量以及运动中角加速度为零的位置.分析 通常所讨论问题中的弹簧的长度方向与物体运动方向相同.如果弹簧的长度方向以及伸长或压缩方向与物体运动方向不同,只要弹簧的弹性形变量为x ,根据胡克定律,它作用于物体的弹性力大小就为kx ,系统的弹性势能就等于221kx . 解 由于不计摩擦,只有重力和弹簧的弹性力作功,系统机械能守恒. 初始时,设重力势能为零,弹性势能为221221R k )(-,达最低点C 时,重力势能为mgR -,弹性势能为221kR ,应用机械能守恒定律得 222211221kR mgR R k +-=-)( 则重物质量为 )(12-=gkR m (1) (2)由图3-17可见,当弹簧与竖直方向夹角为θ时,重力在圆环切线方向的分量为)sin(θ2mg ;弹簧伸长量为)cos (R R -θ2,弹性力为)cos (R R k -θ2,在圆环切线方向的分量为θθsin )cos (R R k -2,则重物的切向运动方程为R m R R k mg αθθθ=--sin )cos ()sin(22令角加速度0=α,得θθθθsin )cos (cos sin R R k mg -=22利用(1)式,得 2241-=θcosC m g图3-1742312241'︒=-=arccos θ 3-18 在倾角为︒30的光滑斜面上,质量为1.8 kg 的物体由静止开始下滑,到达底部时将一个沿斜面放置的劲度系数N/m 2000=k 的弹簧压缩了0.2 m 后,达瞬时静止,求:(1)物体达瞬时静止前在斜面上滑过的路程;(2)它与弹簧开始接触时的速率. 分析 只有重力和弹簧的弹性力作功,将物体和弹簧以及地球共同组成一个保守系统机械能守恒.由于实际问题所涉及的都是物体不同位置之间势能的差值,因此势能零点的选取不影响结果,只需考虑如何选取可以使表达式最简单.解 (1)设物体在斜面上滑过的路程为s ,物体达到的最低点为重力势能零点,弹簧压缩量为0x ,弹性势能为2021kx .开始下滑时重力势能为︒30sin mgs ,应用机械能守恒定律,得202130kx mgs =︒sin m 544m 3089812202000302220.sin ...sin =︒⨯⨯⨯⨯=︒=mg kx s (2)设物体与弹簧刚接触时,速度为v ,距最低点距离为0x ,此时重力势能为︒300sin mgx ,应用机械能守恒定律,得20213030v m mgx mgs +︒=︒sin sin m/s 6.52m/s 3020544892 3020=︒⨯-⨯⨯=︒=sin )..(.sin )(s-x g v3-19 在气垫导轨上质量为m 的滑块被劲度系数分别为k 1、k 2的两弹簧连接到气轨的两端点A 、B 上.起初气轨水平放置,两弹簧均处于无形变状态,滑︒30图3-18块位于O 点,如图3-19(a )所示.现迅速将气轨的B 端抬高,使其与水平面的夹角为α,如图3-19(b )所示,求滑块运动可能达到的最低点与O 点间的距离及滑块可能达到的最大速率.分析 当重力势能和弹簧的弹性势能同时存在,应用机械能守恒定律时,应该注意势能零点的选取问题.可以按表达式最简单的原则选取重力势能零点,而弹性势能零点则通常应选取在弹簧无形变位置.解 取气轨倾斜后O 点为重力势能和弹性势能零点,设最低点与O 点间的距离为1x ,在最低点时,重力势能为αsin 1mgx -,弹性势能为212121x k k )(+,应用机械能守恒定律,得02121211=++-x k k mgx )(sin α 2112k k mg x +=αsin 气轨倾斜后,在重力和弹性力作用下,O 点不再是平衡位置.设平衡位置为O ',与O 点距离为0x ,应用牛顿定律可得0021=+-x k k mg )(sin α (1)重力势能为αsin 0mgx -,弹性势能为202121x k k )(+,物体通过O '点时速率最大,设为m v ,动能为2m 21mv ,应用机械能守恒定律,得 021212m 20210=+++-v m x k k mgx )(sin α (2)O A k 1 m k 2 B(a ) (b )图3-19由(1)和(2)式得210m k k m g gx +=-=ααsin sin v 3-20 在一根光滑的半径很小的水平轴上,挂着一段均匀绳,长为l ,质量为m ,如图3-20(a )所示,绳开始滑动时,d BC =.求当l BC 32=时的加速度,并证明此时速度为)(22922d ld l l g -+-=v 分析 挂在光滑细轴上的软绳,左右两段相互作用的张力大小相等,为内力,以整条软绳为研究对象,作用在左右两段上的重力相对于运动方向分别为同向和反向.轴的支承力始终垂直于绳的运动方向,不产生加速度,也不作功.与其他连接体问题类似,沿运动方向应用牛顿定律建立方程最为简捷.解 当l BC 32=时,设软绳加速度为a ,沿运动方向应用牛顿定律得ma mg mg =-3132 g a 31= 取B 点为重力势能零点,竖直向下为x 轴正向,位于坐标x 的绳上小段d x 的势能为x lmgx d -,则 初始时,d BC =,势能为 2021d d lmg x l mgx d -=-⎰ d l BA -=,势能为 2021d )(d l l mg x l mgx d l --=-⎰- BA Cxd l -32(a ) (b ) 图3-20l d BC 32==时,势能为 23221⎪⎭⎫ ⎝⎛-l l mg l BA 31=,势能为 23121⎪⎭⎫ ⎝⎛-l l mg 此时绳的速率为v ,动能为221v m ,应用机械能守恒定律,得 2222231213221212121⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛-=---l l mg l l mg m d l l mg d l mg v )( 解得 )(22922d ld l l g -+-=v 3-21 假设地球可以看成是质量为m '、半径为R 的球体,试由(3-20)式推求以地面为重力势能零点时质量为m 的物体在距地面高度为h 处(R h <<)的重力势能的表达式,并将所得结果与(3-15)式作比较.分析 物体与地球之间的作用力是万有引力,是物体质心间距离平方成反比的力,往往取无限远处为这类力的势能零点.但在地球表面附近,通常取地球表面为重力势能零点.由于计算势能时,一般都是计算两位置的势能差,因此选取不同的零点,所得最终结果都相同.解 由(3-20)式得物体从高度为h 处移动到地面万有引力作的功为)(h R R h m m G h R R m m G r r m m G W Rh R +'=⎪⎭⎫ ⎝⎛+-'='-=⎰+0020 11d 根据势能定义,此功就等于重力势能.注意到在地球表面附近h R >>,则20p R h mm G W E '≈= 与(3-15)式作比较,得 20R m G g '=。