9.1主机遥控系统的组成
- 格式:ppt
- 大小:152.00 KB
- 文档页数:18
第四章主机遥控系统实例在主机遥控系统中,驾驶台遥控主机必须是全自动的;集中控制室遥控主机可以是全自动的,也允许是半自动的。
根据发送遥控主机信号的不同性质,遥控系统大致分三类:第一类是气动遥控系统。
驾驶台发送的遥控信号是气动的,并经全自动的气动逻辑回路输出控制信号来操纵主机,集中控制室发送的气动遥控信号,可以与驾驶台共用一套气动逻辑回路,对主机进行全自动遥控。
而有些遥控系统,为简化集中控制室的遥控线路,取消了驾驶台遥控的某些功能,通过扳动操车手柄来实现,如重复起动、程序负荷等。
第二类是电一气结合的主机遥控系统。
其中,集中控制室均采用半自动气动遥控系统,而驾驶台是采用电动遥控系统,驾驶台发送的是电的遥控信号,经电动逻辑回路处理后,再经电/气转换器转换成气压信号并由集中控制室的气动逻辑回路来操纵主机。
驾驶台电动遥控系统有两种形式:一种是电动逻辑回路由继电器组成,称为电动有触点遥控系统;另一种是电动逻辑回路由电子器件,如逻辑门电路和运算放大器组成,称为电动无触点遥控系统。
它们与集中控制室气动逻辑回路合在一起,分别称为有触点电一气结合遥控系统和无触点电一气结合遥控系统。
第三类是用微型计算机组成的遥控系统。
集中控制室仍采用半自动气动遥控系统,驾驶台发送的也是电动遥控信号。
其实它也属于电一气结合的遥控形式,所不同的是,其逻辑回路不是由硬件电路组成的,而是由计算机软件程序实现的。
近年来,采用变距桨作为推进装置的船舶有所增加,特别是对于负荷变化较大的工作船及某些滚装船较多采用变距桨。
主机驱动定距桨和驱动变距桨的工作方式是完全不同的,因此,主机遥控系统的功能和组成差异较大。
第三章所介绍的各种逻辑回路,主要是对驱动定距桨主机而言的,有些是不适合于变距桨的。
限于篇幅,这里将不再介绍驱动变距桨的主机遥控系统。
在实际应用中,主机遥控系统的形式是多种多样的。
尽管它们的基本逻辑功能是相同的,但各种逻辑回路的组成方式、回路之间的连接方式,以及某些逻辑回路的实现方法等都各不相同,不可能以一概全。


第二章主机遥控系统第二章主机遥控系统第一节主机遥控系统种类及其功能一、类型1电-液式主机遥控功能2电-气式主机遥控功能3电动式主机遥控功能4气动式主机遥控功能5微型计算机控制系统二、主机遥控系统的功能主机遥控功能是通过各种逻辑回路和自动装置等完成对主机的操作,它必须具有如下功能:1换向程序2启动程序3重复启动程序4重启动程序5慢转启动程序6速度控制程序7全速运行时的换向程序8自动避开临界转速的逻辑程序9应急操作功能10安全保护功能11系统功能模拟环节第二节启动逻辑回路一、启动准备条件1盘车机联锁脱开、2主启动空气阀打开、3启动空气分配器打开、4未有停车信号(滑油压力低停车、推力块高温停车、应急停车等)、5调速器啮合、6电源通讯正常二、启动逻辑在完成启动准备条件之后,发出启动信号后,系统经过T1(0秒)秒打开启动电磁阀,转速达到P2(发火速)设定的转速后,转为正常运行切断启动回路。
如转速降到P1以下,经过T3时间(0秒),将进行重复启动(重启动)。
一般启动时间设定在10秒,时间内不能启动发出启动故障报警。
主机停车(切断燃油回路)在停车时,如果主机转速超过P5设定值,进行高限启动空气制动,转速下降到P4设定值时进行低转速启动空气制动。
在制动过程中主机2未停下,经T6时间的延时确认,发出制动时间超限报警。
三、启动失败的原因1、换向失败换向失败使燃油零位闭锁。
引起的原因主要有:a在规定的时间内未能完成换向、b换向控制阀失控、c控制空气压力不足等问题2、点火失败是指在启动过程中,主机转速已达到发火速,并进行了气-油转换,由于燃油未能正常燃烧,主机转速又降低至发火速以下或停转,这种情况成为点火失败。
引起点火失败的原因主要是燃油系统的故障、燃油条件不良或是在遥控状态下设定的给定启动油门低等原因引起的。
3、不能启动是指在启动操作中主机转速一直不能达到启动转速,这种现象称为不能启动。
原因有主启动阀或控制空气分配器失控、启动空气压力过低、控制空气压力低、主轴承与轴咬死、螺旋桨缠异物等原因。
第五章柴油机主机遥控系统第一节主机遥控系统的基本概念船舶柴油机主机遥控是指离开机旁在驾驶台或集中控制室对主机进行远距离操纵的一种方式。
在这种操作方式中,不可能直接利用主机操纵机构本身的手柄或手轮来操纵主机,而必须在操纵部位(驾驶台或集中控制室)发出的操车信号,这就需要在操纵部位与主机的执行机构之间设置一套综合的逻辑控制回路。
该回路包括组合逻辑回路、时序逻辑回路、反馈控制回路,以及各种安全保护回路。
主机遥控系统是轮机自动化的重要组成部分,是现代化船舶实现无人机舱的必不可少的条件之一。
主机遥控不仅能改善轮机人员的工作条件,改善船舶的操纵性能,而且还能提高船舶航行的安全性,以及主机工作的可靠性和经济性。
通常情况下,驾驶台遥控的自动化程度比集中控制室的高,在驾驶台遥控主机时,驾驶员可按常规的车中操作方法来操纵主机。
这时,主机所需的操作步骤及操作要求均由遥控系统自动实现。
而在集中控制室遥控主机时,考虑到操纵主机的是轮机员,故某些操作可以按主机的操作步骤及要求进行,故遥控系统可省掉一些不必要的环节。
因此,为了降低造船成本和提高船舶的安全性和可靠性,往往把驾驶台遥控主机设计成全自动遥控系统,而把集中控制室设计成半自动遥控系统。
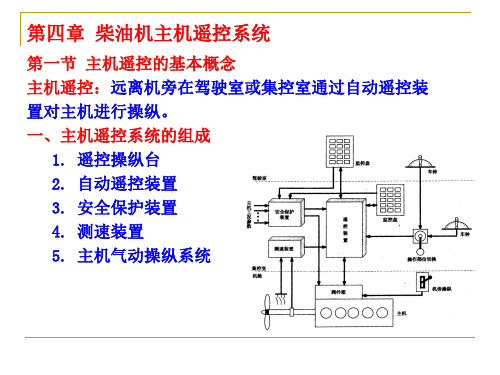
一、主机遥控系统的组成主机遥控系统组成如图5-1-1所示,由图可见,主机遥控系统是由遥控操纵台、遥控装置、测速装置、安全保护装置,以及包括遥控执行机构在内的主机操纵系统五大部分组成。
1.遥控操纵台遥控操纵台设置在驾驶室和集控室内,它的主要作用是提供人机对话的界面。
遥控操纵台上的主要部件是车钟手柄,人通过车钟手柄向遥控系统发出控制命令,如正车、倒车、停车和转速的设定。
显示屏向人们提供遥控系统执行命令的情况、各种参数和状态信号的显示、报警指示、车钟记录以及辅车钟信号的联系。
紧急操纵按钮用于发出应急运行、应急停车等命令。
操纵部位转换开关用于驾驶室与集控室间的遥控部位选择。
2.遥控装置遥控装置是整个遥控系统的控制中心,它根据遥控操纵台给出的指令,测速装置提供的主机转速的大小和方向,位置检测器提供的凸轮轴位置信号等,完成对主机的起动、换向、制动、停油等逻辑程序控制以及转速与负荷控制功能。

主机遥控系统的逻辑与控制回路主机遥控是指离开机旁在驾驶台(BR)或集中控制室(ECR)对主机进行远距离操纵的一种控制方式。
我们把用于完成主机的这种遥控操作的控制系统称为主机遥控系统。
它是由组合逻辑回路、时序逻辑回路、反馈控制回路和各种安全保护回路组成的复杂系统。
主机遥控系统不仅大大地减轻了机舱工作人员的劳动强度,而且可以减少误操作,改善船舶的操纵性能,提高主机运转的可靠性和经济性,乃至船舶航行的安全性。
主机遥控系统是机舱自动化的重要组成部分,也是实现无人机舱的必备条件之一。
在设有主机遥控系统的船上,操纵主机的位置通常有三个,即机旁、集控室和驾驶台。
其中,机旁操纵是最基本的操纵方式,它确保当遥控系统出现故障时仍可以在机旁进行临时的应急操作,以保证航行的安全。
因此,在机旁总是设有“机旁(手动,应急)——遥控(自动)”转换阀。
在正常情况下,该阀应处于“遥控(自动)”位置,这时就可在集控室或驾驶台对主机进行遥控操作了。
主机的遥控操作分为集控室遥控和驾驶台遥控,其操作部位的切换由设在集控室操纵台上的“集控——驾控”转换装置实现。
船舶柴油主机的基本操纵,例如起动,换向,停油和制动等都是借助空气动力来进行的。
要实现主机的这些基本操纵,就必须为主机均配备各种气动伺服机构和相应的逻辑阀件及气路系统,称为气动操纵系统......。
对于目前常见的主机遥控系统,其机旁操纵和集控室遥控均是通过气动操纵系统实现的。
此时,驾驶员通过传令车钟将车令发到机舱,轮机员根据车令对主机进行手动操纵,逐渐使主机达到车令所要求的状态。
因此,集控室遥控实际上只是手动..遥控..。
驾驶台遥控一般是在气动操纵系统的基础上增加必要的组合逻辑和时序逻辑模块,使这些逻辑模块能直接接收驾驶台发出的车令,并按照主机的正确操纵规程发出各种控制命令,通过接口电磁阀与气路接口,进而对主机进行自动遥控....。
而这些逻辑模块的实现可以是气动的,也可以是电动的,而电动的又可以是有触电式,无触电式和微机控制的。
第四篇船舶主机遥控系统第一章船舶主机遥控系统概述及技术资料浏览导引第一节船舶主机遥控系统概述主机遥控是指远离机旁在驾驶台( 或集控室)通过自动控制装置对船舶柴油机主机进行操纵。
如同所有的控制系统一样, 主机遥控系统是由控制器和控制对象( 主机)二部份组成的。
控制器的任务在于不断地采集来自驾驶台的操纵命令和来自主机的运行状态信息,做出判断,自动地根据系统的控制要求,向被控对象发出控制信号,以达到控制目标。
随着船舶自动化技术的发展, 装设主机遥控系统的船舶逐年增多。
比较完善的主机遥控系统通常设有如下功能(或环节):(1)逻辑程序控制,它包括操纵转换位置判断、自动换向、自动起动、重复起动、重起动、制动的逻辑控制,(2)转速与负荷控制,它包括转速信号发送速率限制和负荷程序等,(3)安全保护与应急操作,(4)系统功能模拟试验,(5)系统故障自检等。
组成自动控制系统的元件有气动、机械、液压、继电器----接触器、半导体分立元件、小规模集成电路等不同种类, 在技术发展的不同阶段,主机遥控系统的类型随采用的控制元件不同也有气动式、电动式、电-气式、电-液式等不同。
随着微型计算机在控制领域的广泛应用, 自上世纪八十年代远洋船舶主机遥控系统普遍采用了微型机做为控制器的核心,使系统的设计、生产、使用和维修都更为简单, 可靠性也大大提高。
主机遥控系统是根据主机的特点及操作要求设计的,主机型号不同,船东船舶建造的选型习惯,遥控系统的具体配置是有差别的,实现控制目的所采用的元部件也不同。
本书第一章至第五章MAN B&W MC机型气动操纵系统、M-800 Ⅱ型主机遥控系统的配置和M-800型电子调速器的内容,选取自中远集团2000年-2001年建造的船舶“天顺海”“德惠海”等的资料。
第五章AC-4型主机遥控系统选取自5446TEU集装箱船舶“COSCO ROTTERDAM”资料。
至于各艘船舶不同型号主机和遥控系统的具体设计和配置,请以相应的船舶技术资料为准。