open,close控制小灯亮灭
- 格式:doc
- 大小:20.50 KB
- 文档页数:3
电磁泄放阀(ERV)控制箱使用、操作说明书1、阀门及控制系统工作方式当过热器出口处的蒸汽压力超过正常工作压力,达到预先设定的开启压力时,控制箱将发出指令通过执行机构打开ERV主阀泄放蒸汽,当蒸汽压力降低到预先设定的关闭压力(一般为开启压力的98%)时,控制箱将发出指令通过执行机构关闭ERV主阀。
1)在就地控制箱上将手动(MANUAL)/自动(AUTO)切换开关置于手动(MANUAL)时:通过控制箱面板上的开关按钮来手动开启(OPEN)/关闭(CLOSE)阀门,或通过布置在控制室里的远手操控制面板来手动开启(OPEN)/关闭(CLOSE)阀门;2)在手动(MANUAL)/自动(AUTO)切换开关置于自动(AUTO)时:当系统压力在正常工作压力范围内时,可通过DCS远程信号来开启(DCS OPEN)/关闭(DCS CLOSE)阀门。
注:DCS远程信号为无源脉冲信号, 脉冲大于1秒。
3)在手动(MANUAL)/自动(AUTO)切换开关置于自动(AUTO)时:系统会根据“RED LION”予先设置的参数,当压力传感器到达开启压力(SP2)时,阀门自动打开;当压力低于关闭压力(SP1)时,阀门自动关闭。
2.控制系统类型ERV控制系统有三种:1)与配电动执行机构的电磁泄放阀配套,电动执行机构电源为380V AC/50Hz/3Ph;控制箱控制电源为220V AC/50Hz/1Ph.。
用户只需提供电源:380V AC/50Hz/3Ph 即可,三线五线制2)与配气动执行机构的电磁泄放阀配套,控制箱控制电源为220V AC/50Hz/1Ph.用户提供电源:220V AC/50Hz。
3)与配气动执行机构的电磁泄放阀配套,控制箱控制电源为220VDC或110VDC用户提供电源:220VDC或110VDC。
4) 远手操控制面板(可选项)3. 压力传感器测压范围:0-250bar, 0-400bar或其他工作温度:-20℃~80℃(介质温度最高610℃)信号输出:两线制 4-20mA输出,24VDC电源由控制箱提供。
英语里的各种“开”和“关”1.open/closeopen的原意是把封起来的或合起来的东西打开或揭开,强调从紧闭的状态向开放状态的移动。
反义词为close,意为“关闭,合上”。
(1). 打开门窗/ 容器、书等—— open the door / window/ box/ bookeg:<1>.Open the window and let the fresh air in.打开窗户,让新鲜空气进来。
<2>.Open your book and turn to page six.打开书翻到第六页。
(2). 睁开眼睛,张开嘴巴—— open the eyes / open the moutheg:<1>.You are running a fever. Please open your mouth and I’ll checkit.你在发烧。
请张开嘴让我检查一下。
<2>.Close your eyes lightly and take a deep breath.轻轻地闭上眼睛,深呼吸。
2.turn on/turn off我们知道turn有“转动,旋转”的意思,所以turn on也可以理解为拧开。
通常用于某种设备或者电器类。
比如:电视,灯,收音机之类。
其反义短语是: turn off,意为“关掉”。
eg:(1). Remember to turn off the lights before you leave.在你离开之前记得关灯。
(2). It’s news time. Turn on the radio.新闻时间到了,打开收音机。
3.switch on/switch offswitch on有“接通,开启,合闸”的意思,用于“打开”一些电器设备,使其开始工作。
比如:电脑,机器等。
其反义短语为switch off,意为:“关掉,切断”。
eg:(1). He switched on the computer and began to work.他打开电脑开始工作。
用按键控制LED灯的亮灭,当按键按下时,LED灯亮,当按键松开时,LED灯灭。
#include"msp430f6638.h"unsigned char flag;void main(void){WDTCTL = WDTPW+WDTHOLD; // Stop WDTP4DIR &=~(BIT2);P4DIR |= BIT4+BIT5+BIT6; // P4.4,P4.5,P4.6 set as outputP4OUT &=~(BIT4+BIT5+BIT6); // set led offP2IE |= BIT6; // enable P2.6 interruptP2IFG &= ~(BIT6); // clean interrupt flag__enable_interrupt(); // enable interruptwhile(1){ if((P4IN & 0x04)==0){ P2IFG |= BIT6;}else{P2IFG &=~BIT6;}}} // PORT2 interrupt service routine#pragma vector=PORT2_VECTOR__interrupt void port_2(void){P4OUT ^=(BIT4+BIT5+BIT6); // set led onP2IFG &=~BIT6; // clean interrupt flag}用按键控制LED灯的亮灭,当按键按下时,LED灯亮,当按键松开时,LED灯灭。
(查询)#include"msp430f6638.h"void main(void){WDTCTL = WDTPW+WDTHOLD; // Stop WDT//setting directionP4DIR &= ~(BIT2); //setting IO for inputP4DIR |= BIT4+BIT5+BIT6; // P4.4,P4.5,P4.6 set as outputwhile (1){if ((P4IN & 0x04) == 0) //If key is pressed{P4OUT |= BIT4+BIT5+BIT6; //led on}else{P4OUT &=~(BIT4+BIT5+BIT6); // led off}}}将ACLK配置为VLOCLK(约为10K),并将ACLK通过P1.0口输出#include<msp430f6638.h>void main(void){WDTCTL = WDTPW + WDTHOLD; //关看门狗UCSCTL4 |= SELA_1; //将ACLK时钟源配置为VLO;P1DIR |= BIT0;P1SEL |= BIT0; //将ACLK通过P1.0输出__bis_SR_register(LPM3_bits);//进入LPM3,SMCLK和MCLK停止,ACLK活动}设ACLK = XT1 = 32768Hz,并通过P1.0输出。
1通力电梯技术资料之LCE指示灯含义通力3000无机房电梯LCE指示灯解释通力3000无机房电梯LCE指示灯解释指示灯亮灭注解Emergencyalam(红色)有警报没有警报按选择/输入按钮重置Liftinfault(红色)有故障,电梯不能启动电梯正常Cpurunning(黄色)Cpu正在运行CPU不在运行CPU运行时指示灯闪烁Inspection(黄色)42:DS位于检修位置42:DS位于正常位置42:DS在轿顶Rescuedrive(黄色)RDF开关在RECALL运行方式运行RDF在正常位置开关在控制柜CarcommunicationOK(绿色)LCECPU与LCECCB间信息交流正常,软件版本2.3以上2.3以前版本应是灭的,2.3以后版本若灭,则信息交流有问题检查接线Shaftcomm..ok(绿色)LCECPU与楼层板间信息交流正常LCECPU与楼层板间信息交流不正常检查接线+24VcontrollerOK(绿色)24V控制柜供电电源正常24电源不正常检查保险丝F4+5VcontrollerOK9(绿色)LCECPU5V电源正常5V电源故障如果24V指示灯亮,则更换LCECPU板+24VCar&shaftOK(绿色)24V轿厢,井道供电电源正常24V电源故障检查保险丝F5Changebord(红色)LCECPU板烧毁LCECPU板正常更换新板左列中间Speed>0.1m/s(黄色)正在加速,速度大于0.1M/S正在减速,速度小于0.1M/SStartpemit(黄色)主继电器都激活(201:1,201:2,201:4)主继电器都释放如果灯不灭,可能有继电器阻塞(XD1/3 POS379)Maincontactor(黄色)LCECPU主继电器激活指令有效指令无效Shaftdoorcontact(黄色)所有层门都已关好层门未关好XH2/3终端POS.379Closedoorcommand(黄色)关门命令有效关门命令无效从LCE到ADVDriveneeded(黄色)控制系统认为需要启动不需要启动呼梯,泊梯.自动平层等V3FOK(绿色)驱动系统可正常运行驱动单元有故障Safetyinput(绿色)到轿门触点前的安全回路正常到轿门触点前的安全回路有问题XC1/5POS379 Opendoorcommand(黄色)开门命令有效无命令从LCE到ADV photocell(黄色)光眼光束受挡光束未受挡XB29/2及XB31/2POS.379Openbutton(黄色)轿厢内开门按钮按下未按下Closeforcelimiter(黄色)关门力限制器申请重开门不需重开门XB28/8及XB30/8POS806右列Driveup(黄色)向上运行指令已送往V3F25无效77:u(黄色)轿厢在上部减速区轿厢不在上部减速区77:U断开61:U(黄色)轿厢在61:U区内轿厢不在61:U区内地坎以上5MM,以下145MM30(黄色)轿厢在门区内轿厢不在门区内地坎以上150MM,以下150MM61N(黄色)轿厢在61:N区内轿厢不在61:N区内地坎以下5MM,以上145MM77:N(黄色)轿厢在下部减速区轿厢不在下部减速区77:N断开77:S(黄色)77:S开关断开或无此开关轿厢不在上下端站只在终端楼层间距短的时候Drivedown(黄色)向下运行指令已送往V3F25无效。
737NG飞机驾驶舱面板介绍2.驾驶舱培训资料驾驶舱主要面板介绍Cockpit Panel ArrangementForward Overhead PanelFlight Control Panel1.飞控主电门A、B:位置ON、OFF、STBYRUDON:由系统液压给副翼、方向舵、升降舵、升降舵感觉计算机供压OFF:断开液压,关闭飞控关断活门STBYRUD:断开液压,备用泵工作,备用方向舵关断活门打开,给备用方向舵PCU增压飞控低压灯:当飞控主电门A、B位置在ON:灯灭,监视系统液压;当压力小于1300PSI时灯亮,大于1600PSI时灯灭当飞控主电门A、B位置在STBYRUD:低压灯成为备用方向舵关断活门的位置灯,当备用方向舵关断活门完全打开时,低压灯灭低液压油量灯:油量小于50%STANDBYHYD低压灯:当压力小于1300PSI时灯亮,大于1600PSI时STANDBYHYD灯灭2.飞行扰流板电门A、B:位置ON、OFFON:由系统液压供压至飞行扰流板PCUOFF:关闭飞行扰流板关断活门3.YAWDAMPER电门:位置ON、OFFON:偏航阻尼器接通方向舵PCU灯:偏航阻尼器系统脱开,灯亮4.YAWDAMPER5.备用襟翼预位电门:位置OFF、ARM6.备用襟翼控制电门:位置DOWN、OFF、UPDOWN:LEFLAPSOV打开,备用泵将前缘装置全伸出,电马达将TEFLAP放出UP:电马达将TEFLAP收上OFF:可随时停止电马达的操作备用EMDP自动打开方式:1)飞控电门A、B都在ON位2)系统压力小于1300PSI3)在空中或轮速大于60节4)FLAP NOT UP此时主警戒灯和FLTCONT灯亮备用人工打开方式1)任一个飞控主电门A、B在STBYRUD2)备用襟翼在ARM位7.FEELDIFFDRESS灯:在升降舵感觉计算机内,A和B系统的计量压力存在的压差大于25%且后缘襟翼收上时灯亮;8.SPEEDTRIMFAIL灯:FCCs的速度配平功能不可用,该灯常亮9. MACHTRIMFAIL灯:FCCs的马赫配平功能不可用10. AUTOSLATFAIL灯:AUTOSLAT功能失效(P2)偏航阻尼器指示器:用来指示方向舵偏航阻尼器的运动,不表示飞行员方向舵脚蹬的输入信号Fueling / Defueling / MeasurementFuel Control Panel1.ENGVALVECLOSED灯:发动机关断活门在HMU内灯:翼梁活门由启动手柄和火警手柄控制SPARVALVECLOSED2. FUELTEMP表:指示NO.1油箱的燃油温度燃油关断电瓶:控制SPARVALVE和APUFUELVALVE3.&5.交输活门及VALVEOPEN灯:活门打开,灯暗亮;活门关闭灯灭;活门与电门位置不一致时灯明亮4. FILTERPASS灯:当燃油滤阻塞时,燃油滤压差电门感觉压差大于11.5PSI时,FILTERPASS灯亮;若压差继续增大,燃油滤旁通活门则打开6.中央油箱燃油泵低压灯:中央燃油泵电门ON位,当泵输出压力小于22PSI时低压灯亮,当泵输出压力大于22PSI时,灯灭。
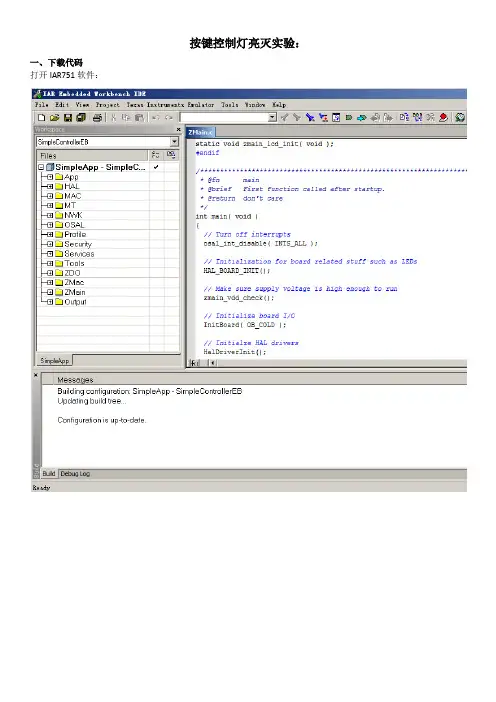
按键控制灯亮灭实验:一、下载代码打开IAR751软件:File------open----workspace定位到目录,打开里面的工程。
打开工程后,如下图,进行设置下:然后在workspace处选择:,然后直接debug停止dbueg。
然后把该模块从仿真器上拔下,把另外一个模块连接到仿真器,按下仿真器的复位按钮,然后在workspace处选择,然后debug再停止debug。
然后拔下模块。
二、操作模块模块跳帽图:1(多点配置中的小模块跳帽图):Debug后模块首次启动测试顺序:1,给SimpleControllerEB(也就是选择了SimpleControllerEB选项进行debug的模块)模块上好电池,开启电源开关,此时SimpleControllerEB模块的LED2闪烁。
2,按下SimpleControllerEB的up键,此时SimpleControllerEB模块的LED2熄灭,LED3闪烁数秒后一直保持常亮状态,表明该模块已经建立了zigbee网络。
3,等上一步中的LED3常亮后,按下up键,该步骤使SimpleControllerEB模块允许别的模块对其绑定。
(备注:该步骤必须在步骤4前完成,否则SimpleSwitchEB模块无法正常接入zigbee网络)4,打开SimpleSwitchEB模块的电源,该模块的LED2闪烁。
按下该模块的up键,LED2灯熄灭,数秒后LED3进入快速闪烁状态,这表明该模块已经搜索到网络,并已加入到网络中。
5,再次按下SimpleSwitchEB的up键,正常情况下,SimpleControllerEB模块的LED1会闪烁一下,表明有设备与它建立了绑定。
6,到这里就可以交替按下SimpleSwitchEB的right键来控制SimpleControllerEB模块的LED1的交替亮灭了。
重启模块的情况说明:重启SimpleControllerEB模块后,SimpleControllerEB模块直接完成步骤2的动作,此时测试顺序从步骤3开始。
1通力电梯技术资料之LCE指示灯含义通力3000无机房电梯LCE指示灯解释通力3000无机房电梯LCE指示灯解释指示灯亮灭注解Emergencyalam (红色)有警报没有警报按选择/ 输入按钮重置Liftinfault (红色)有故障,电梯不能启动电梯正常Cpurunning (黄色)Cpu正在运行CPU不在运行CPU运行时指示灯闪烁Inspection (黄色)42: DS位于检修位置42: DS位于正常位置42: DS在轿顶Rescuedrive (黄色)RDF开关在RECAL运行方式运行RDF在正常位置开关在控制柜CarcommunicationOK (绿色)LCECPI与LCECC间信息交流正常,软件版本2.3以上2.3 以前版本应是灭的,2.3 以后版本若灭,则信息交流有问题检查接线Shaftcomm..ok(绿色儿CECPUf楼层板间信息交流正常LCECPI与楼层板间信息交流不正常检查接线+24Vco ntrollerOK(绿色)24V控制柜供电电源正常24 电源不正常检查保险丝F4 +5VcontrollerOK9(绿色儿CECPU5电源正常5V电源故障如果24V指示灯亮,则更换LCECPI板+24VCar&shaftOK绿色)24V轿厢,井道供电电源正常24V 电源故障检查保险丝F5Changebord红色儿CECP板烧毁LCECPI板正常更换新板左列中间Speed>0.1m/s(黄色)正在加速,速度大于0.1M/S正在减速,速度小于0.1M/SStartpemit(黄色)主继电器都激活(201:1,201:2,201:4)主继电器都释放如果灯不灭,可能有继电器阻塞(XD1/3POS379)Mai neontactor(黄色儿CECPUfc继电器激活指令有效指令无效Shaftdoorco ntact(黄色)所有层门都已关好层门未关好XH2/3 终端POS.379Closedoorcomma nd(黄色)关门命令有效关门命令无效从LCE到ADVDrive needed(黄色)控制系统认为需要启动不需要启动呼梯,泊梯.自动平层等V3FOK绿色)驱动系统可正常运行驱动单元有故障Safety in put (绿色)到轿门触点前的安全回路正常到轿门触点前的安全回路有问题XC1/5POS379 Opendoorcommand(黄色)开门命令有效无命令从LCE到ADVphotocell黄色)光眼光束受挡光束未受挡XB29/2 及XB31/2POS.379Ope nbutto n(黄色)轿厢内开门按钮按下未按下Closeforcelimiter(黄色)关门力限制器申请重开门不需重开门XB28/8 及XB30/8POS806右列Driveup(黄色)向上运行指令已送往V3F25无效77:u(黄色)轿厢在上部减速区轿厢不在上部减速区77:U 断开61:U(黄色)轿厢在61:U区内轿厢不在61:U区内地坎以上5MM,以下145MM30(黄色)轿厢在门区内轿厢不在门区内地坎以上150MM,以下150MM61N(黄色)轿厢在61:N区内轿厢不在61:N区内地坎以下5MM, 以上145MM77:N(黄色)轿厢在下部减速区轿厢不在下部减速区77:N 断开77:S(黄色)77:S开关断开或无此开关轿厢不在上下端站只在终端楼层间距短的时候Drivedown(黄色)向下运行指令已送往V3F25无效。
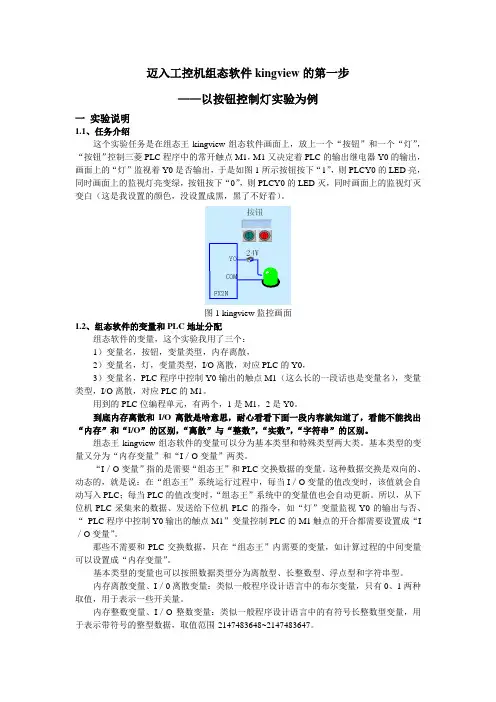
迈入工控机组态软件kingview的第一步——以按钮控制灯实验为例一实验说明1.1、任务介绍这个实验任务是在组态王kingview组态软件画面上,放上一个“按钮”和一个“灯”,“按钮”控制三菱PLC程序中的常开触点M1,M1又决定着PLC的输出继电器Y0的输出,画面上的“灯”监视着Y0是否输出,于是如图1所示按钮按下“1”,则PLCY0的LED亮,同时画面上的监视灯亮变绿,按钮按下“0”,则PLCY0的LED灭,同时画面上的监视灯灭变白(这是我设置的颜色,没设置成黑,黑了不好看)。
图1 kingview监控画面1.2、组态软件的变量和PLC地址分配组态软件的变量,这个实验我用了三个:1)变量名,按钮,变量类型,内存离散,2)变量名,灯,变量类型,I/O离散,对应PLC的Y0,3)变量名,PLC程序中控制Y0输出的触点M1(这么长的一段话也是变量名),变量类型,I/O离散,对应PLC的M1。
用到的PLC位编程单元,有两个,1是M1,2是Y0。
到底内存离散和I/O离散是啥意思,耐心看看下面一段内容就知道了,看能不能找出“内存”和“I/O”的区别,“离散”与“整数”,“实数”,“字符串”的区别。
组态王kingview组态软件的变量可以分为基本类型和特殊类型两大类。
基本类型的变量又分为“内存变量”和“I/O变量”两类。
“I/O变量”指的是需要“组态王”和PLC交换数据的变量。
这种数据交换是双向的、动态的,就是说:在“组态王”系统运行过程中,每当I/O变量的值改变时,该值就会自动写入PLC;每当PLC的值改变时,“组态王”系统中的变量值也会自动更新。
所以,从下位机PLC采集来的数据、发送给下位机PLC的指令,如“灯”变量监视Y0的输出与否、“PLC程序中控制Y0输出的触点M1”变量控制PLC的M1触点的开合都需要设置成“I /O变量”。
那些不需要和PLC交换数据,只在“组态王”内需要的变量,如计算过程的中间变量可以设置成“内存变量”。
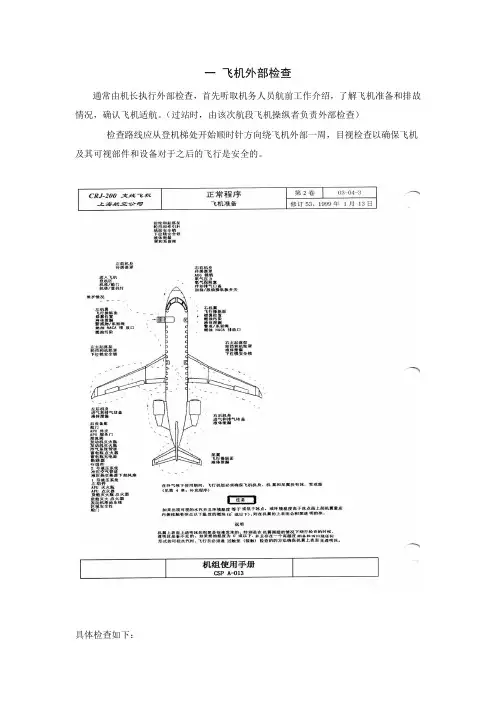
一飞机外部检查通常由机长执行外部检查,首先听取机务人员航前工作介绍,了解飞机准备和排故情况,确认飞机适航。
(过站时,由该次航段飞机操纵者负责外部检查)检查路线应从登机梯处开始顺时针方向绕飞机外部一周,目视检查以确保飞机及其可视部件和设备对于之后的飞行是安全的。
具体检查如下:1.登机门应急灯检查完好。
2.左备用静压孔无堵塞,备用全压探头,左全静压探头管套取下并完好,左结冰探测器和迎角探测器完好。
3.前电子设备舱门和雷达天线罩关闭。
4.机头整流罩完好,风挡及雨刷完好,前着陆灯完好。
5.前轮和起落架部分:轮胎和轮榖完好,前轮减震支柱压缩正常且无渗漏,转弯作动筒和收上作动筒完好,刹车蓄压器压力不小于750磅/平方英尺(5171 帕),前起落架锁销和ADG安全销取下,维护灯关闭,前轮转弯及液压管完好,胎压正常,前起落架舱门按需,轮挡挡好。
6.外部交流电源服务面板和外部服务面板关好(按需),氧气服务面板关好,ADG舱门关好。
7.右全静压探头,总温探头管套取下并完好,右结冰探测器和迎角探测器完好,右备用静压孔无堵塞,氧气绿色释放膜片完好。
8.厨房服务门关好,厨房服务门应急灯完好,加油/放油面板和加油/放油接头口盖关好,水系统服务面板关好,电子舱排气和前排水管完好。
9. TCAS,ATC2,VHF1-2,DME2,ADF天线完好。
10.右着陆灯/滑行灯,右航行灯,右频闪灯,机翼上方应急灯和机翼照明灯完好。
11.冲压空气口完好,机翼防侧滑操纵面完整无损。
12.右机翼操纵面和区域无障碍及污染,机翼前后缘完好。
13.燃油油滤盖盖好,燃油排放和防冰排气口完好,右机翼上下表面及翼梢小翼无损,静电放电刷(6只)管套取下并完好,翼上应急出口关好。
14.右机翼整流罩,副翼,襟翼,飞行扰流板和地面扰流板完好。
15.燃油NACA排放口无堵塞。
16.右主起落架部分:轮胎和轮毂完好,轮胎磨损符合标准,胎压正常,减震支柱缩正常且无渗漏,刹车片完好,耐磨销长度符合标准,蓄压器及3号液压系统完好,轮舱无外来物,过热探测环路完好,作动筒完好,起落架锁销取下。
电磁泄放阀(ERV)控制箱现场问题1、阀门不动作1)判断电源是否接好,POWER灯是否亮。
2)判断开关是否闭合及保险是否完好。
3)若为气动,输入气源压力是否正常 (0.6MPA)。
4)LIMIT SWITCH &TORQUE SWITCH(电动)接线是否正确。
5)DCS OPEN,DCS CLOSE(DCS输入,无源脉冲,脉冲大于1秒)接线是否正确。
6)若配有远手操控制面板,则必须接上。
2、RED LION 仪表显示不正常1)开机时看仪表读数当无4-20mA输入信号时,仪表读数应为-25,若为0,则需进行输入标定。
(参照RED LION说明书)仪表显示值设置为传感器满量程的百分比传感器输出为4 mA 时,仪表显示值为0传感器输出为20mA时,仪表显示值为100(用户可根据情况更改显示设置)2)当有4-20mA输入信号时,若仪表读数没有跟随输入信号而变化,先判断4-20mA输入信号接线极性及信号源性质是否正确。
警告:* 4-20mA模拟输入信号必须为无源信号,否则RED LION仪表会烧毁。
若没有无源4-20mA模拟输入信号源,用有源输入,则接线需改动!!!** 输入信号范围:0-20mA,不要超范围3)当4-20mA输入信号正确时,若仪表读数仍没有跟随输入信号而变化,需判断RED LION仪表是否被误操作将仪表锁住,解决办法:① 恢复出厂设置,重新设置仪表。
② 若无法重新设置仪表,则将仪表后7、8短接线去掉,恢复出厂设置,重新设置仪表,再将7、8短接线接好。
③若仪表仍无变化,判断仪表输入端是否被烧毁:测量仪表输入端4、5输入阻抗应为20Ω,若为无穷大,则输入端已被烧毁。
补救措施:见《仪表修改图》,会降低精度调整仪表输入范围:0-10V输入调整仪表标定点: 传感器输出为 4 mA (2V)时,仪表显示值为0传感器输出为20 mA(10V)时,仪表显示值为100 其它设置不变3、控制箱输出CHOICE MANUAL、FULL OPEN、FULL CLOSE均为无源触点输出,有动作时触点闭合。
蒙德电气伺服门机控制器IMS-DS20P2B 系列详细调试方法补充说明具体按键说明请参照说明书蒙德伺服门机控制器采用专有的磁编码器通讯,使用永磁同步电机控制;无限位开关,以堵转位置为终端信号,运行曲线自动生成;输入输出信号为继电器无源输出,安全不易烧点(误接110V 以上电压除外);接线调试简单+24VX1X2X3X4XC 0V+24VX1X2X3X4XC 0V外部电源接线方法内部电源接线方法1(电源高于18V有效)(开关接通有效)+24VX1X2X3X4XC 0V 内部电源接线方法2(开关接通有效)情况1:无操作器时运行调试方法(出厂默认配置时,新机,已调试好后出现运行不当或不能运行)1.上电前确保sw2开关拨到on位置(试运行模式)后再上电。
12.把sw3开关拨到off(选择自学习磁极模式),按下自学习按钮进行电机磁极自学习,此时ready/error灯亮,当驱动器面板上ready/error灯熄灭即完成。
23.把sw3开关拨到on(选择自学习门宽模式),按下自学习按钮后应作开关门动作,关门到位后完成,至此驱动器应能正常工作.34.若要回到系统中正常运行则把sw2开关拨到off位置。
5.开/关门速度调整电位器旋钮OPEN SPEED/CLOSE SPEED.运行到终端时的保持力矩大小调整电位器旋钮HOLD。
门板堵转力大小调整电位器旋钮OBSTRUCTION。
注1:若上电后驱动器ready/error灯闪烁,请检查是否未接编码器;若POWER高压灯不亮,驱动器有故障,请与厂家联系。
注2:此过程若出现ready/error灯闪烁,则可能为编码器(干扰、通讯故障等)或电机(缺相等)有问题。
检查接线正确且没有断线或更换编码器后再学习。
注3:若没有开关门动作,然后ready/error灯闪烁,则门宽自学习错误.重新上电后可尝试重新自学习电机磁极和把堵转电位器旋钮OBSTRUCTION向+方向旋转,加大堵转力矩的检测.若只开门后没有关门,则把SW1拨到相反方向即可。
pyqt框架实现按键控制led灯的亮灭状态实验总结下文以中括号内的主题为中心,详细探讨了使用PyQt框架实现按键控制LED灯的亮灭状态实验,涵盖了实验目的、实验背景、实验步骤、实验结果与分析以及对实验的总结。
一、实验目的本实验的目的是利用PyQt框架实现按键控制LED灯的亮灭状态,通过控制电路中的LED灯,达到对灯的开关进行控制的目的。
通过这个实验,我们可以了解PyQt框架的基本应用以及灯的电路控制原理。
二、实验背景随着科技的不断发展,图形化界面已经成为了现代软件设计的重要一环。
PyQt是Python语言的GUI编程解决方案之一,它结合了Qt库的功能和Python语言的灵活性,具有操作方便、界面友好等特点,被广泛应用于各个领域。
LED灯是现代电子设备中常见的一种指示灯。
通过控制LED灯的亮灭状态,我们可以在软件界面上显示不同的状态,从而提高用户体验。
三、实验步骤1. 确认实验所需硬件设备:一个LED灯、一个电阻、一个面包板、杜邦线等。
2. 搭建电路:将LED灯通过电阻连接到电源正极,并将其负极连接到面包板上。
3. 准备开发环境:安装Python和PyQt,并导入相关库文件。
4. 创建GUI窗口:使用PyQt框架创建一个窗口,并设置窗口大小、标题等属性。
5. 设计界面元素:在窗口中添加一个按钮,用于控制LED灯的亮灭状态。
6. 编写控制逻辑:通过编写相应的代码,实现点击按钮时灯亮灭的切换。
7. 运行程序:在终端中运行程序,查看窗口显示效果。
8. 调试与优化:根据实际情况进行调试,修复可能出现的bug,并对程序进行优化。
四、实验结果与分析经过以上步骤的实验操作,我们成功地使用PyQt框架实现了按键控制LED灯的亮灭状态。
通过点击按钮,我们可以对LED灯进行开关控制,从而在界面上显示不同的状态。
对于实验结果的分析,我们可以从以下几个方面进行讨论:1. 界面友好度:PyQt框架提供了丰富的控件和布局方式,使得界面的设计更加美观、直观。
汇编按键控制led灯亮灭编写程序概述1. 引言1.1 概述本文旨在介绍使用汇编语言编写程序,以实现按键控制LED灯亮灭的功能。
通过该实验,我们可以深入了解汇编语言的基本原理和操作方法,并学会将其应用于具体的电路控制中。
1.2 文章结构本文主要分为四个部分,分别是引言、汇编按键控制LED灯亮灭编写程序、程序测试与调试过程及结果分析以及总结和展望。
在引言部分,我们将简要介绍文章的背景和目的,为读者提供整个实验的概览。
接下来的部分将逐步介绍硬件准备工作、程序设计思路、关键代码解读与实现步骤等内容。
随后,我们将介绍测试环境搭建、测试过程记录以及结果分析与优化方案等内容。
最后,在总结和展望部分,我们将对整个实验进行总结,并提出改进方向和未来发展方向。
1.3 目的本文的目的是帮助读者了解如何使用汇编语言编写按键控制LED灯亮灭的程序,通过这一示例项目引导读者熟悉汇编语言的基础知识,并培养其分析和解决问题的能力。
通过实验过程,读者可以了解硬件准备工作、程序设计思路以及测试调试过程,并能够根据实际需求进行结果分析和优化方案的提出。
此外,本文还展望了未来发展方向,希望读者能够在此基础上进一步探索和应用汇编语言的相关知识。
以上是文章“1. 引言”部分的内容,旨在概述本文的背景、结构和目的。
如果需要更加详细的内容,请继续阅读后续章节。
2. 汇编按键控制LED灯亮灭编写程序:2.1 完成硬件准备工作:在开始编写汇编程序之前,首先需要进行硬件准备工作。
我们将使用一个单片机来控制LED灯的亮灭,并通过按键来触发控制操作。
为此,我们需要将LED与单片机的输出引脚连接,并将按键与单片机的输入引脚连接。
确保电路连接正确无误后,我们可以开始进行程序设计。
2.2 程序设计思路:在本部分中,我们将介绍如何使用汇编语言设计一个按键控制LED灯亮灭的程序。
该程序的基本原理是通过检测按键状态来改变LED的亮度状态,即当按键被按下时,LED亮起;当按键未被按下时,LED熄灭。
四通阀操作法一、启动控制面板:(1)控制面板在送电后即启动,这时控制面板上POWER ON 指示灯和部分阀状态指示灯会亮,表明四通阀和焦炭塔底进料阀处于电动状态。
如果需要可以手动操作四通阀或焦炭塔底进料阀。
手动操作时,压下电动执行机构上的手动操作柄,通过手轮的旋转方向控制四通阀的切换方向。
(2)四通阀正常生产切换操作,以塔T5101 A切换到塔T5101 B操作为例说明;(3)按工艺规程操作,保证待生产塔的预热温度达到切换条件;(4)按塔T5101 B底进料阀的OPEN按钮,现场确认焦炭塔底进料阀动作正确(阀杆向开阀方向运行);(5)当塔T5101 B底进料指示灯(VALVE OPEN)亮时,表示该阀已全开。
阀门停止。
(6)打开塔T5101 B底进料吹扫蒸汽阀进行吹扫进料线,吹扫2分钟,确认管线畅通后关闭(目测进料线上现场压力表无憋压现象)。
(7)按下控制面板上的DRUM A TO DRUM B按钮,四通阀开始切换。
这时必须密切注意辐射出口总线的压力指示,发现异常,立即按STOP按钮,然后根据情况按下RESTART,同时按下DRUM B TO DRUM A或DRUM A TO DRUM B按钮,将进料切回塔A或切到塔B;如果电动不能实现,立即手动切换四通阀。
(8)当切换到位后,控制面板上塔DRUM A指示灯熄灭、塔DRUM B指示灯亮;(9)打开塔A底进料吹扫蒸汽吹扫30分钟后,打开小吹汽阀,同时关闭塔A进料吹扫蒸汽阀。
然后按塔DRUM A底进料阀CLOSE按钮,现场确认阀门动作正确(阀门向关阀方向运行);(10)当塔DRUM A底料进阀的VALVE CLOSE指示灯亮,表示该阀全关。
(11)然后进行正常的冷焦作业,切换完成。
二、四通阀开工线的切换操作(1)由于正常生产时不需切换至开工线,因此,DRUM A , DRUM B与开工线之间的切换功能是被锁定的。
这时的状态是BYPASS OFF/ON锁的位置是指向OFF状态的。
阀门上open和close的用法阀门是一种用来控制流体流动的装置,常见于各种工业设备、管道和流程系统中。
打开(open)和关闭(close)阀门是日常操作中最基本的需求之一,但正确地使用阀门却不是一件简单的事情。
本文将一步一步回答关于阀门打开和关闭的用法,帮助读者更好地理解和操作阀门。
1. 阀门的基本功能与类型首先,我们需要了解阀门的基本功能和不同类型,以便更好地理解其打开和关闭的用法。
阀门的基本功能是控制流体的通断和流量,以满足不同工况下的需要。
常见的阀门类型包括截止阀、调节阀、安全阀、球阀、蝶阀等。
不同类型的阀门在结构和工作原理上存在差异,因此其打开和关闭的方式也各有特点。
2. 阀门打开前的准备在打开阀门之前,我们需要进行一些准备工作。
首先,要确保自身安全,佩戴必要的防护装备,如安全帽、护目镜等。
其次,要根据现场需求和规程检查阀门所处的环境、压力、温度等条件是否符合操作要求。
此外,还要检查阀门是否处于关闭状态,以免造成意外事故或设备损坏。
3. 步骤一:确定操作方式在打开阀门之前,需要确定采用何种操作方式。
常见的操作方式包括手动操作、电动操作、气动操作等,具体选择何种方式需根据现场情况和阀门类型来决定。
而不同操作方式的选择也会对应不同的操作手册和操作要求。
4. 步骤二:手动打开阀门如果选择手动操作方式,我们需要按照以下步骤进行:- 松开活塞螺母或螺杆锁紧装置,以便能够顺利旋转阀门或移动阀瓣。
- 按照阀门上的操作指示标志,旋转或移动阀门体或阀瓣,使之逐渐打开。
- 在操作过程中,要注意力量的均匀分配,避免用力过猛或不均匀导致阀门损坏或卡住。
5. 步骤三:确认阀门打开在手动打开阀门后,我们需要进行确认,以确保阀门已完全打开。
具体的确认方法因阀门类型而异,一般可通过以下方式进行:- 观察阀门上的指示标志,一般会显示阀门的开度。
- 使用流量计或压力表等辅助工具,测量阀门所在管道的流量或压力,以确定阀门是否已完全打开。
实验名称:open/close控制小灯亮灭
一.实验目的
通过该实验实习,进一步熟悉KDS嵌入式开发系统环境和C语言以及调试方式;加强串口通信(SCI)基本原理及编程原理;理解课本中的程序代码;分别运用查询方式、中断方式实现通信。
二.实验内容
通过串口调试器发送open/close控制小灯亮灭
三.实验过程
1.m ain.c函数
//说明见工程文件夹下的Doc文件夹内Readme.txt文件
//========================================================= #include "includes.h" //包含总头文件
int main(void)
{
//1. 声明主函数使用的变量
uint_32 mRuncount; //主循环计数器
//2. 关总中断
DISABLE_INTERRUPTS;
//3. 初始化外设模块
light_init(RUN_LIGHT_BLUE, LIGHT_OFF); //蓝灯初始化
light_init(RUN_LIGHT_RED, LIGHT_OFF); //蓝灯初始化
uart_init(UART_0,MCGIRCLK, 9600); //串口0时钟MCGIRCLK(4000Khz)
uart_init (UART_1,BUSCLK, 9600); //串口1、2使用总线时钟24000Khz
uart_init (UART_2,BUSCLK, 9600); //波特率使用9600
uart_send_string(UART_0, "Hello Uart_0!\r\n"); //串口发送初始化提示
uart_send_string(UART_1, "Hello Uart_1!\r\n");
uart_send_string(UART_2, "Hello Uart_2!\r\n");//只插了串口2,所以在串口调试器中只有Hello Uart_2!
//4. 给有关变量赋初值
mRuncount=0; //主循环计数器
//5. 使能模块中断
uart_enable_re_int(UART_0); //使能串口0接收中断
uart_enable_re_int(UART_1); //使能串口1接收中断
uart_enable_re_int(UART_2); //使能串口2接收中断
//6. 开总中断
ENABLE_INTERRUPTS;
//主循环开始============================================================= for(;;)
{
//运行指示灯(RUN_LIGHT)闪烁---------------------------------------------
mRuncount++; //主循环次数计数器+1
if (mRuncount >= RUN_COUNTER_MAX) //主循环次数计数器大于设定的宏常数
{
mRuncount=0; //主循环次数计数器清零
//light_change(RUN_LIGHT_BLUE); //蓝色运行指示灯(RUN_LIGHT_BLUE)状态变化
}
//以下加入用户程序-------------------------------------------------------- }//主循环end_for
//主循环结束============================================================= }
2.isr.c中的串口2接受中断服务例程
//串口2接收中断服务例程
void isr_uart2_re(void)//内部实现串口2接受字节,并返回字节
{
uint_8 ch;uint_8 ah;uint_8 bh;uint_8 dh;
uint_8 flag = 1;
DISABLE_INTERRUPTS;
ch = uart_re1(UART_2, &flag);//串口2接受一个字节,成功接受flag置0,失败flag置1
ah = uart_re1(UART_2, &flag);
bh = uart_re1(UART_2, &flag);
dh = uart_re1(UART_2, &flag);
if (0 == flag)
{
uart_send1(UART_2, ch);//MCU通过串口2发送一个字节
uart_send1(UART_2, ah);//MCU通过串口2发送一个字节
uart_send1(UART_2, bh);//MCU通过串口2发送一个字节
uart_send1(UART_2, dh);//MCU通过串口2发送一个字节
if('o' == ch &&'p' == ah && 'e' == bh && 'n' == dh)
light_control(RUN_LIGHT_BLUE,LIGHT_ON);
if('c' == ch &&'l' == ah && 'o' == bh && 's' == dh)
light_control(RUN_LIGHT_BLUE,LIGHT_OFF);
}
ENABLE_INTERRUPTS;
}。