第二章 机械系统设计
2.1.3 系统的设计 因控制系统的设计特别重要,所以从控制系统的角度可划分为:静
态设计与动态设计 1. 静态设计 静态设计是指依据系统的功能要求,通过研究制定出机械系统的初
步设计方案并确定执行元件各项参数、主要元部件的选择与控制电路设 计、各级电路的增益、各级间阻抗匹配和抗干扰措施等。
J d 2 b d M
dt2
dt
第二章 机械系统设计
2.2.3 电气系统
设有一个以电阻R、电感L和电容C组成的R-L-C电路如图2. 3所示。试 列写以ui为输入,uo为输出的微分方程式。
解: 根据基尔霍夫定律写出电路方程
di 1
L dt C
idt Ri ui
其中
uo
1 C
idt
亦即
i C du0 dt
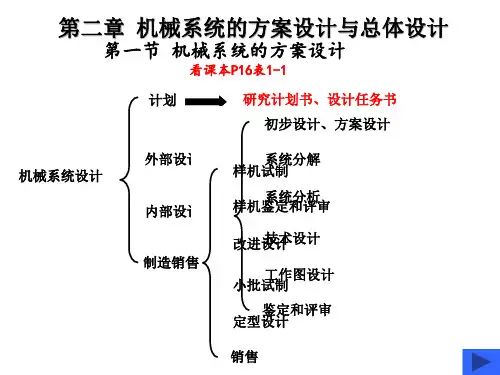
2.1.2 机械系统的组成 1.传动机构 机电一体化机械系统中的传动机构不仅仅是转速和转矩
的变换器,而且已成为伺服系统的一部分,它要根据伺服控制的 要求进行选择设计,以满足整个机械系统良好的伺服性能。
2.导向机构 导向机构的作用是支承和导向,它为机械系统中各运动装 置能安全、准确地完成其特定方向的运动提供保障,一般指导 轨、轴承等。 3.执行机构 执行机构是用来完成操作任务的直接装置。执行机构根 据操作指令的要求在动力源的带动下完成预定的操作。
2. 动态设计 主要是设计校正补偿装置,使系统满足动态技术指标的要求,通常 要进行计算机仿真试验。 指研究系统在频率域的特性,借助静态设计的系统结构,通过建立系 统各组成环节的数学模型,推导出系统整体的传递函数,并利用自动控制 理论的方法求得该系统的频率特性(幅频特性和相频特性)。
第二章 机械系统设计 2.2 机械、电气数学模型的相似性 2.2.1 机械移动系统 机械平移系统的基本元件是质量、阻尼和弹簧。建立机