行星齿轮速比计算解析法
- 格式:ppt
- 大小:1.49 MB
- 文档页数:31
行星齿轮减速器的相关计算行星齿轮减速器是一种常用的机械传动装置,其特点是结构紧凑、承载能力大、传动效率高。
在工程设计和机械计算中,对行星齿轮减速器的相关参数进行计算是必不可少的工作。
本文将详细介绍行星齿轮减速器的相关计算方法。
一、行星齿轮减速器的基本构造二、行星齿轮减速器的传动比计算传动比是指输入轴和输出轴的转速比,可以通过以下公式计算:i=(N_s+N_r)/N_s其中,i为传动比,N_s为太阳齿轮的齿数,N_r为行星齿轮的齿数。
行星齿轮减速器的传动比可以通过调整太阳齿轮和行星齿轮的齿数来实现。
三、行星齿轮减速器的传动效率计算η=(1-δ/100)*(1-ε/100)其中,η为传动效率,δ为齿间损失系数,ε为噪声损失系数。
行星齿轮减速器的传动效率受到齿轮的磨损和摩擦影响,一般情况下,传动效率在95%以上。
四、行星齿轮减速器的扭矩计算输入轴扭矩计算可以通过以下公式计算:T_in = P / (n * η)其中,T_in为输入轴扭矩,P为输出功率,n为输入轴转速,η为传动效率。
输出轴扭矩计算可以通过以下公式计算:T_out = i * T_in其中,T_out为输出轴扭矩,i为传动比,T_in为输入轴扭矩。
五、行星齿轮减速器的选择在实际工程中,选择合适的行星齿轮减速器需要考虑以下因素:1.承载能力:根据实际应用需求,选择承载能力适当的行星齿轮减速器。
2.传动比:根据需要的输出转速和输入转速,选择合适的行星齿轮减速器。
3.外形尺寸:根据实际安装空间,选择符合尺寸要求的行星齿轮减速器。
4.传动效率:选择传动效率高的行星齿轮减速器,以提高传动效率和节能效果。
5.稳定性:选择结构稳定、运行平稳的行星齿轮减速器,以减少振动和噪声。
六、行星齿轮减速器的基本计算流程1.确定输入功率、输入转速和输出转速。
2.根据输入功率和输入转速计算输入轴扭矩。
3.根据输入轴扭矩和传动比计算输出轴扭矩。
4.根据输出轴扭矩和输出转速计算输出功率。

在《机械原理》上,行星齿轮求解是通过列一系列方程式求解,其求解过程繁琐容易出错,其实用不着如此,只要理解了传动比eab i 的含义,就可以很快地直接写出行星齿轮的传动比,其关键是掌握几个根据e ab i 的含义推导出来公式,随便多复杂的行星齿轮传动机构,根据这几个公式都能从头写到尾直接把其传动比写出来,而不要象《机械原理》里面所讲的方法列出一大堆方程式来求解。
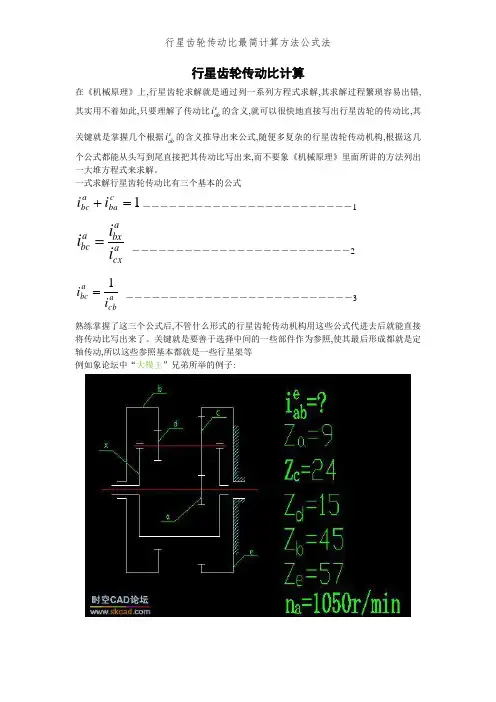
一式求解行星齿轮传动比有三个基本的公式1=+c ba a bc i i ――――――――――――――――――――――――1 a cx a bxa bc i i i = ―――――――――――――――――――――――――2a cb a bc i i 1= ――――――――――――――――――――――――――3熟练掌握了这三个公式后,不管什么形式的行星齿轮传动机构用这些公式代进去后就能直接将传动比写出来了。
关键是要善于选择中间的一些部件作为参照,使其最后形成都是定轴传动,所以这些参照基本都是一些行星架等例如象论坛中“大模王”兄弟所举的例子:在此例中,要求出e ab i =,如果行星架固定不动的话,这道题目就简单多了,就是一定轴传动。
所以我们要想办法把e ab i 变成一定轴传动,所以可以根据公式a cx a bx a bci i i =将x 加进去, 所以可以得出:e bx e ax eab i i i =要想变成定轴传动,就要把x 放到上面去,所以这里就要运用第一个公式1=+c ba abc i i 了,所以)1()1(xbe x ae ebx e ax eab i i i i i --==所以现在eab i 就变成了两个定轴传动之间的关系式了。
定轴传动的传动比就好办了,直接写出来就可以了。
即)1()1())1(1())1(1()1()1(01c e bd ae c e b d c e a c x be x ae e bx e ax e ab Z Z Z Z Z Z Z Z Z Z Z Z Z Z i i i i i ⨯-+=⨯--⨯--=--== 再例如下面的传动机构:已知其各轮的齿数为z 1=100,z 2=101,z 2’ =100 ,z 3=99。
行星齿轮机构传动比计算方法Key words: epicyclic gear train; speed ratio; compute way.随着行星齿轮减速器以及行星齿轮传动在变速箱中的广泛应用,对行星齿轮传动的了解和掌握已成为工程技术人员的必要技能。
但是,对于刚接触行星齿轮传动的工程技术人员来说,行星齿轮传动的速比计算比较不容易理解和掌握。
本文通过对各类参考资料及教科书中的行星齿轮传动速比计算方法进行总结归纳,并针对常用的最具代表性的2K-H型行星齿轮传动,分别用不同方法对其传动特性方程进行了推导论证。
行星齿轮传动或称周转轮系。
根据《机械原理》[1]上的定义,我们可把周转轮系分为差动轮系和行星轮系。
为理解方便,本论文所讨论限于2K-H型周转轮系。
关于行星齿轮传动(周转轮系)的速比计算方法,归纳起来有两大类四种方法,分别为由行星架固定法和力矩法组成的分析法;由速度图解法和矢量法组成的图解法[2]。
矢量图解法一般适用于圆锥齿轮组成的行星齿轮传动,在此不作介绍;下面分别运用其它三种计算方法对2K-H型周转轮系的传动特性方程(1)进行推导。
1-太阳轮 2-行星轮 3-内齿圈 H -行星架 图1 行星齿轮传动Fig 1 Epicyclic gear train0)1(31=++-αωωαωH (1) 结合图1,式中1ω为太阳轮1的转速、Hω为行星架H 转速、3ω为内齿圈3转速、α为内齿圈3与太阳轮1的齿数比即13Z Z =α。
1 行星架固定法机械专业教科书上一般介绍的都是此种方法,也可叫转化机构法。
其理论是一位名叫Wlies 的科学家于1841年提出的,即“一个机构整体的绝对运动并不影响其内部各构件间的相对运动” [3],就像手表的时针、分针、秒针的相对运动不会因带表人的行动而变化。
如图2所示,其中太阳轮1、行星轮2、内齿圈3、行星架H 的转速分别为Hωωωω、、、321。
我们假定整个行星轮系放在一个绕支点O 旋转的圆盘上,此圆盘的转速为 H ω-。
行星齿轮传动比计算在《机械原理》上,行星齿轮求解是通过列一系列方程式求解,其求解过程繁琐容易出错,其实用不着如此,只要理解了传动比eab i 的含义,就可以很快地直接写出行星齿轮的传动比,其关键是掌握几个根据e ab i 的含义推导出来公式,随便多复杂的行星齿轮传动机构,根据这几个公式都能从头写到尾直接把其传动比写出来,而不要象《机械原理》里面所讲的方法列出一大堆方程式来求解。
一式求解行星齿轮传动比有三个基本的公式1=+c ba a bc i i ――――――――――――――――――――――――1a cxa bxa bcii i =―――――――――――――――――――――――――2 acba bci i 1= ――――――――――――――――――――――――――3熟练掌握了这三个公式后,不管什么形式的行星齿轮传动机构用这些公式代进去后就能直接将传动比写出来了。
关键是要善于选择中间的一些部件作为参照,使其最后形成都是定轴传动,所以这些参照基本都是一些行星架等例如象论坛中“大模王”兄弟所举的例子:在此例中,要求出eab i =,如果行星架固定不动的话,这道题目就简单多了,就是一定轴传动。
所以我们要想办法把e ab i 变成一定轴传动,所以可以根据公式a cxabxa bci i i =将x 加进去,所以可以得出:e bxe axe abi i i =要想变成定轴传动,就要把x 放到上面去,所以这里就要运用第一个公式1=+c ba abc i i 了,所以)1()1(xbe xae e bxe axe abi i i i i --==所以现在eab i 就变成了两个定轴传动之间的关系式了。
定轴传动的传动比就好办了,直接写出来就可以了。
即)1()1())1(1())1(1()1()1(01ce b d a ec e b dc e a c xbe xae e bx e ax eab Z Z Z Z Z Z Z Z Z Z Z Z Z Z i i i i i ⨯-+=⨯--⨯--=--== 再例如下面的传动机构:已知其各轮的齿数为z 1=100,z 2=101,z 2’ =100 ,z 3=99。
行星减速机速比计算方法行星减速机是一种常用的传动装置,其速比计算方法对于设计和选择具有重要意义。
在实际工程中,需要根据具体的传动要求来确定行星减速机的速比,以满足不同的工作条件。
下面将介绍行星减速机速比的计算方法,希望能对相关工程技术人员有所帮助。
首先,行星减速机的速比是指输入轴和输出轴的转速比。
在计算速比时,需要考虑输入轴和输出轴的转矩传递关系,以及行星减速机内部各个齿轮的传动比。
一般来说,行星减速机的速比可以通过以下公式来计算:速比 = 输出轴转速 / 输入轴转速。
其中,输出轴转速和输入轴转速可以通过实际测量或根据传动要求来确定。
在实际应用中,需要根据具体的传动需求来选择合适的速比,以满足工作要求。
其次,行星减速机的速比还受到内部齿轮传动比的影响。
行星减速机内部通常包括太阳轮、行星轮和内齿圈等齿轮,它们之间的传动比会影响整个行星减速机的速比。
因此,在计算速比时,需要考虑这些内部齿轮的传动比,以确保计算结果的准确性。
另外,行星减速机的速比还受到结构参数的影响。
行星减速机的结构参数包括模数、齿数、齿宽等,这些参数会直接影响到齿轮的传动比。
在实际计算速比时,需要考虑这些结构参数的影响,以确保速比的准确计算。
最后,需要注意的是,行星减速机的速比计算方法还需要考虑其它因素的影响,如齿轮的磨损、传动效率等。
在实际工程中,这些因素会对速比产生一定的影响,因此在计算速比时需要进行综合考虑,以得到准确的结果。
综上所述,行星减速机速比的计算方法涉及到输入轴和输出轴的转速、内部齿轮的传动比、结构参数以及其它因素的影响。
在实际工程中,需要综合考虑这些因素,以确保速比的准确计算,从而满足不同的传动需求。
希望本文介绍的内容能对相关工程技术人员有所帮助。
行星齿轮传动比计算行星齿轮传动由太阳轮、行星轮和内齿轮三个主要部分组成。
太阳轮位于行星齿轮机构的中心,而行星轮则围绕太阳轮旋转,在行星轮外侧则还有一圈内齿轮。
行星齿轮传动的传动比由太阳轮、行星轮和内齿轮的齿数关系决定。
首先,我们需要知道太阳轮、行星轮和内齿轮的齿数分别为N1、N2和N3传动比=(N1+N3)/N2其中,传动比是行星齿轮传动的输出角速度与输入角速度之比。
值得注意的是,传动比可以是正值也可以是负值。
当传动比为正值时,行星轮和内齿轮的运动方向与太阳轮相同;当传动比为负值时,行星轮和内齿轮的运动方向与太阳轮相反。
下面以一个具体的例子来说明行星齿轮传动比的计算。
假设太阳轮的齿数为10,行星轮的齿数为20,内齿轮的齿数为30。
则传动比可以计算如下:传动比=(10+30)/20=2这意味着行星齿轮传动的输出角速度是输入角速度的两倍。
当太阳轮以一定的速度旋转时,行星轮和内齿轮将以两倍的速度旋转。
通过这种方式,可以实现大扭矩的传递。
对于行星齿轮传动,还有一个称为传动效率的重要参数。
传动效率表示的是传动装置中输入功率与输出功率之间的转换效率。
一般来说,行星齿轮传动的效率比较高,通常可以达到95%以上。
除了行星齿轮传动比的计算,还需要注意到传动比的选择应满足以下几个条件:1.传动比要满足机械系统的要求,如输出转速、扭矩传输等。
2.传动比要能满足传动装置的安装空间要求,包括整体尺寸、配合间隙等。
3.传动比要考虑齿轮的使用寿命,如齿轮齿数、齿轮模数、齿轮材料等。
综上所述,行星齿轮传动比的计算是行星齿轮传动设计中的重要一环,需要根据具体的太阳轮、行星轮和内齿轮的齿数来求解。
通过合理选择传动比,可以实现高效率的传动和大扭矩的传递。
![行星齿轮传动比的计算公式[最新]](https://uimg.taocdn.com/8d9629c33086bceb19e8b8f67c1cfad6195fe938.webp)
行星齿轮传动比计算在《机械原理》上,行星齿轮求解是通过列一系列方程式求解,其求解过程繁琐容易出错,其实用不着如此,只要理解了传动比eab i 的含义,就可以很快地直接写出行星齿轮的传动比,其关键是掌握几个根据e ab i 的含义推导出来公式,随便多复杂的行星齿轮传动机构,根据这几个公式都能从头写到尾直接把其传动比写出来,而不要象《机械原理》里面所讲的方法列出一大堆方程式来求解。
一式求解行星齿轮传动比有三个基本的公式1=+cba abc i i ――――――――――――――――――――――――1acxabx abc i i i =―――――――――――――――――――――――――2acbabc i i 1=――――――――――――――――――――――――――3熟练掌握了这三个公式后,不管什么形式的行星齿轮传动机构用这些公式代进去后就能直接将传动比写出来了。
关键是要善于选择中间的一些部件作为参照,使其最后形成都是定轴传动,所以这些参照基本都是一些行星架等例如:在此例中,要求出eab i =?,如果行星架固定不动的话,这道题目就简单多了,就是一定轴传动。
所以我们要想办法把e ab i 变成一定轴传动,所以可以根据公式acxabx abc i i i =将x 加进去,所以可以得出:ebxeaxeab i i i =要想变成定轴传动,就要把x 放到上面去,所以这里就要运用第一个公式1=+c ba a bc i i 了,所以)1()1(xbe xae ebxeaxeab i i i i i --==所以现在eab i 就变成了两个定轴传动之间的关系式了。
定轴传动的传动比就好办了,直接写出来就可以了。
即)1()1())1(1())1(1()1()1(01ce bdae ce bdc e a c xbe xae ebxeaxeab ZZ Z ZZZ ZZ Z ZZ Z ZZ i i i i i ⨯-+=⨯--⨯--=--==再例如下面的传动机构:已知其各轮的齿数为z 1=100,z 2=101,z 2’ =100 ,z 3=99。
行星齿轮传动比计算在《机械原理》上,行星齿轮求解就是通过列一系列方程式求解,其求解过程繁琐容易出错,其实用不着如此,只要理解了传动比eab i 的含义,就可以很快地直接写出行星齿轮的传动比,其关键就是掌握几个根据e ab i 的含义推导出来公式,随便多复杂的行星齿轮传动机构,根据这几个公式都能从头写到尾直接把其传动比写出来,而不要象《机械原理》里面所讲的方法列出一大堆方程式来求解。
一式求解行星齿轮传动比有三个基本的公式1=+c ba a bc i i ――――――――――――――――――――――――1 a cx a bx abci i i = ―――――――――――――――――――――――――2 a cb abc i i 1= ――――――――――――――――――――――――――3熟练掌握了这三个公式后,不管什么形式的行星齿轮传动机构用这些公式代进去后就能直接将传动比写出来了。
关键就是要善于选择中间的一些部件作为参照,使其最后形成都就是定轴传动,所以这些参照基本都就是一些行星架等例如象论坛中“大模王”兄弟所举的例子:在此例中,要求出e ab i =?,如果行星架固定不动的话,这道题目就简单多了,就就是一定轴传动。
所以我们要想办法把e ab i 变成一定轴传动,所以可以根据公式a cx a bx a bci i i =将x 加进去, 所以可以得出:e bx e ax eab i i i =要想变成定轴传动,就要把x 放到上面去,所以这里就要运用第一个公式1=+c ba abc i i 了,所以)1()1(xbe x ae ebx e ax eab i i i i i --==所以现在eab i 就变成了两个定轴传动之间的关系式了。
定轴传动的传动比就好办了,直接写出来就可以了。
即)1()1())1(1())1(1()1()1(01c e bd ae c e b d c e a c x be x ae e bx e ax e ab Z Z Z Z Z Z Z Z Z Z Z Z Z Z i i i i i ⨯-+=⨯--⨯--=--== 再例如下面的传动机构:已知其各轮的齿数为z 1=100,z 2=101,z 2’ =100 ,z 3=99。
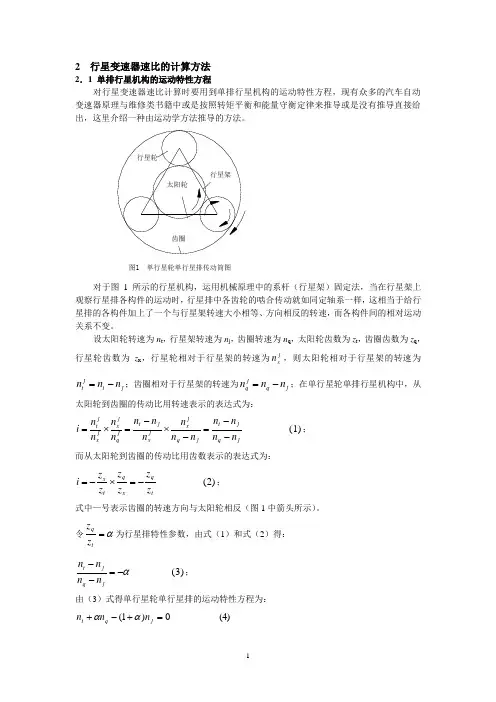
2 行星变速器速比的计算方法2.1 单排行星机构的运动特性方程对行星变速器速比计算时要用到单排行星机构的运动特性方程,现有众多的汽车自动变速器原理与维修类书籍中或是按照转矩平衡和能量守衡定律来推导或是没有推导直接给出,这里介绍一种由运动学方法推导的方法。
对于图1所示的行星机构,运用机械原理中的系杆(行星架)固定法,当在行星架上观察行星排各构件的运动时,行星排中各齿轮的啮合传动就如同定轴系一样,这相当于给行星排的各构件加上了一个与行星架转速大小相等、方向相反的转速,而各构件间的相对运动关系不变。
设太阳轮转速为n t ,行星架转速为n j ,齿圈转速为n q ,太阳轮齿数为z t ,齿圈齿数为z q ,行星轮齿数为z x ,行星轮相对于行星架的转速为jx n ,则太阳轮相对于行星架的转速为j t j t n n n -=;齿圈相对于行星架的转速为j q j q n n n -=;在单行星轮单排行星机构中,从太阳轮到齿圈的传动比用转速表示的表达式为:(1) j q j t j q j x jxj t j q j x j x j t n n n n n n n n n n n n n n i --=-⨯-=⨯=; 而从太阳轮到齿圈的传动比用齿数表示的表达式为:(2) tq x qt x z z z z z z i -=⨯-=;式中—号表示齿圈的转速方向与太阳轮相反(图1中箭头所示)。
令α=tq z z 为行星排特性参数,由式(1)和式(2)得:(3) α-=--jq j t n n n n ;由(3)式得单行星轮单行星排的运动特性方程为:(4) 0)1(=+-+j q t n n n αα同理可推出图2所示的双行星轮单行星排的运动特性方程为:(5) 0)1(=---j q t n n n αα式(4)和式(5)可合并为:(6) 0)1(=±-±j q t n n n αα式中±中的+号用于单行星轮行星排,—号用于双行星轮行星排。
行星齿轮机构传动比计算方法Key words: epicyclic gear train; speed ratio; compute way.随着行星齿轮减速器以及行星齿轮传动在变速箱中的广泛应用,对行星齿轮传动的了解和掌握已成为工程技术人员的必要技能。
但是,对于刚接触行星齿轮传动的工程技术人员来说,行星齿轮传动的速比计算比较不容易理解和掌握。
本文通过对各类参考资料及教科书中的行星齿轮传动速比计算方法进行总结归纳,并针对常用的最具代表性的2K-H型行星齿轮传动,分别用不同方法对其传动特性方程进行了推导论证。
行星齿轮传动或称周转轮系。
根据《机械原理》[1]上的定义,我们可把周转轮系分为差动轮系和行星轮系。
为理解方便,本论文所讨论限于2K-H型周转轮系。
关于行星齿轮传动(周转轮系)的速比计算方法,归纳起来有两大类四种方法,分别为由行星架固定法和力矩法组成的分析法;由速度图解法和矢量法组成的图解法[2]。
矢量图解法一般适用于圆锥齿轮组成的行星齿轮传动,在此不作介绍;下面分别运用其它三种计算方法对2K-H型周转轮系的传动特性方程(1)进行推导。
1-太阳轮 2-行星轮 3-内齿圈 H -行星架 图1 行星齿轮传动Fig 1 Epicyclic gear train0)1(31=++-αωωαωH (1) 结合图1,式中1ω为太阳轮1的转速、Hω为行星架H 转速、3ω为内齿圈3转速、α为内齿圈3与太阳轮1的齿数比即13Z Z =α。
1 行星架固定法机械专业教科书上一般介绍的都是此种方法,也可叫转化机构法。
其理论是一位名叫Wlies 的科学家于1841年提出的,即“一个机构整体的绝对运动并不影响其内部各构件间的相对运动” [3],就像手表的时针、分针、秒针的相对运动不会因带表人的行动而变化。
如图2所示,其中太阳轮1、行星轮2、内齿圈3、行星架H 的转速分别为Hωωωω、、、321。
我们假定整个行星轮系放在一个绕支点O 旋转的圆盘上,此圆盘的转速为 H ω-。
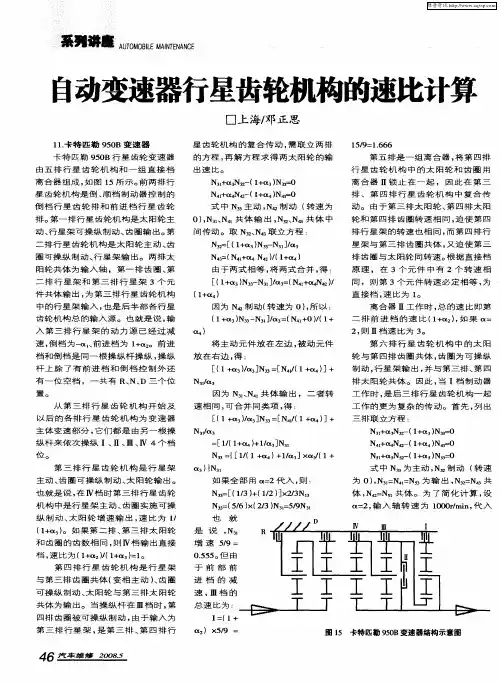
自动变速器行星齿轮机构的速比计算□上海/邓正思AUTOMOBILE MAINTENANCE系列讲座5汽车维修图7通用5L40E 变速器结构示意图③3档:后太阳轮主动、行星架(或前太阳轮)制动、后齿圈输出。
前太阳轮与后齿圈交叉组合:18×(1000)+38×(1000)-(18+38)×(1000)=0后排行星齿轮机构:14×(1000)+38×(1000)-(14+38)×(1000)=03档滑行时,当输出齿圈转速增加10%,可按两种工况分别说明。
第一种工况:K 1、K 2工作,K 1设置自由轮。
前太阳轮与后齿圈交叉组合:18×(1000)+38×(1100)-(18+38)×(1068)=0后排行星齿轮机构:14×(1000-18)+38×(1100)-(14+38)×(1068)=0在前排方程中,K 2无自由轮,齿圈增速迫使行星架提速为1068r/min;在后排方程中,K 1有自由轮,随着齿圈和行星架的提速,后太阳轮也提速到1018r/min,公式中是-18,由于有过桥,-18变为+18,滑行成立。
第二种工况:K 1、K 3工作,K 1设置自由轮。
前太阳轮与后齿圈交叉组合:18×(1000-211)+38×(1100)-(18+38)×(1000)=0后排行星齿轮机构:14×(1000-271)+38×(1100)-(14+38)×(1000)=0由于前太阳轮未啮合,齿圈增加的10%由前太阳轮减速211r/min 浮转;主动元件后太阳轮与离合器K 1之间增配自由轮F 2,又由于有短行星齿轮的过桥,-271r/min 变为+271r/min ,允许后太阳轮浮转,同样滑行条件满足。
④4档:前太阳轮制动、行星架主动、后齿圈输出。
行星齿轮减速比计算公式行星齿轮减速器是一种广泛应用于机械传动领域的高精度、高可靠性的减速装置。
其主要特点是结构紧凑、传动效率高、承载能力强、运转平稳、噪音低等优点,因此被广泛应用于各种工业设备中。
在行星齿轮减速器的设计和应用中,减速比是一个十分重要的参数,它直接影响到减速器的传动性能和使用效果。
因此,准确地计算行星齿轮减速比是十分关键的。
行星齿轮减速比的计算公式是基于行星齿轮传动原理和几何学原理推导而来的。
在此,我们将详细介绍行星齿轮减速比的计算公式及其应用。
一、行星齿轮传动原理行星齿轮传动是一种基于行星齿轮组的减速传动形式,其结构如图1所示。
图1 行星齿轮传动结构示意图行星齿轮传动由外齿轮、行星齿轮、内齿轮和行星架组成。
其中,外齿轮是固定不动的,内齿轮是输出轴,行星齿轮则绕行星架旋转。
当输入轴带动外齿轮旋转时,外齿轮的齿轮会带动行星齿轮绕内齿轮旋转,从而实现减速传动。
行星齿轮传动的减速比与行星轮齿数、太阳轮齿数和内齿轮齿数的关系式如下:i = (Zs + Zp) / Zp其中,i表示行星齿轮传动的减速比;Zs表示太阳轮的齿数;Zp表示行星轮的齿数。
二、行星齿轮减速比计算公式行星齿轮减速比的计算公式可以通过行星齿轮传动原理和几何学原理推导而来。
1. 求太阳轮的齿轮数太阳轮的齿轮数可以通过行星齿轮传动的几何关系求得。
如图2所示,在行星齿轮传动中,行星齿轮的中心距离与太阳轮的中心距离之比为:a /b = (Zs + Zp) / Zp其中,a表示行星齿轮的中心距离,b表示太阳轮的中心距离。
因此,太阳轮的齿数可以表示为:Zs = (a / b) × Zp / (1 - a / b)2. 求内齿轮的齿轮数内齿轮的齿轮数可以通过行星齿轮传动的几何关系和行星齿轮传动的减速比求得。
如图3所示,在行星齿轮传动中,内齿轮的齿数和太阳轮的齿数之比为:Zi / Zs = i / (i - 1)其中,i表示行星齿轮传动的减速比。