(整理)第6章弹性薄板小挠度弯曲问题的基础变分原理(16K)
- 格式:doc
- 大小:1.16 MB
- 文档页数:19
第六章弯曲变形知识要点1、弯曲变形的概念1)、挠曲线弯曲变形后梁的轴线变为挠曲线。
平面弯曲时,挠曲线为外力作用平面内的平面曲线。
2)、平面弯曲时的变形在小变形情况下,梁的任意二横截面绕各自的中性轴作相对转动,杆件的轴线变为平面曲线,其变形程度以挠曲线的曲率来度量。
1》纯弯曲时,弯矩—曲率的关系(由上式看出,若弯曲刚度EI为常数则曲率为常数,即挠曲线为圆弧线)2》横力弯曲时,弯矩—曲率的关系3)、平面弯曲时的位移1》挠度——横截面形心在垂直于梁轴线方向上的线位移,以表示。
2》转角——横截面绕其中性轴旋转的角位移,以表示。
挠度和转角的正负号由所选坐标系的正方向来确定。
沿y轴正方向的挠度为正。
转角的正负号判定规则为,将x轴绕原点旋转90°而与y轴重合,若转角与它的转向相同,则为正,反之为负。
4)、挠曲线近似微分方程5)、受弯曲构件的刚度条件,2、积分法求梁的挠度和转角由积分常数C、D由边界条件和连续性条件确定。
对于梁上有突变载荷(集中力、集中力偶、间断性分布力)的情况,梁的弯矩M(x)不是光滑连续函数,应用上式时,应分段积分,每分一段就多出现两个积分常数。
因此除了用边界条件外,还要用连续性条件确定所有的积分常数。
边界条件:支座对梁的位移(挠度和转角)的约束条件。
连续条件:挠曲线的光滑连续条件。
悬臂梁边界条件:固定端挠度为0,转角为0连续条件:在载荷分界处(控制截面处)左右两边挠度相等,转角相等简支梁边界条件:固定绞支座或滑动绞支座处挠度为0连续条件:在载荷分界处(控制截面处)左右两边挠度相等,转角相等连接铰链处,左右两端挠度相等,转角不等3、叠加原理求梁的挠度和转角1)、叠加原理各载荷同时作用下梁任一截面的挠度和转角等于各个载荷单独作用时同一截面挠度和转角的代数和。
2)、叠加原理的限制叠加原理要求梁某个截面的挠度和转角与该截面的弯矩成线性关系,因此要求:1》弯矩M和曲率成线性关系,这就要求材料是线弹性材料2》曲率与挠度成线性关系,这就要求梁变形为小变形4、弯曲时的超静定问题——超静定梁1)、超静定梁约束反力数目多于可应用的独立的静力平衡方程数的梁称为超静定梁,它的未知力不能用静力平衡方程完全确定,必须由变形相容条件和力与变形间的物理关系建立补充方程,然后联立静力平衡方程与补充方程,求解所有的未知数。

薄板弯曲问题弹性理论分析及数值计算课程设计指导教师:孙秦学院:航空学院姓名:程云鹤学号: 2011300092班级: 01011105薄板弯曲问题弹性理论分析及数值计算一、一般三维体弹性系统求解微分方程体系总结1、弹性力学中的基本假定(1)连续性,即假定整个物体的体积都被组成这个物体的介质所填满。
(2)完全弹性,物体在引起形变的外力被除去后可完全恢复原形 (3)均匀性,即假定物体是由同一材料组成的。
(4)各向同性,物体的弹性在所有各个方向都相同。
(5)和小变形假定,即假定位移和形变是微小的。
2、平衡微分方程在一般空间问题中,包含15个未知函数,即6个应力分量、6个形变分量和3个位移分量,它们都是x,y,z 坐标变量的函数。
对于空间问题,在弹性体区域内部,考虑静力学、几何学和物理学三方面条件,分别建立平衡微分方程、几何方程和物理方程;并在给定约束面或面力的边界上,建立位移边界条件或应力边界条件。
然后在边界条件下根据所建立的三套方程求解应力分量、形变分量和位移分量。
在物体内的任一点P ,割取一个微小的平行六面体,如图1-1所示。
根据平衡条件即可建立方程。
(1)分别以连接六面体三对相对面中心的直线为矩轴,列出力矩的平衡方程0=∑M ,可证明切应力的互等性:yx xy xz zx zy yz ττττττ===,,(2)分别以轴轴、轴、z y x 为投影轴,列出投影的平衡方程0=∑x F ,0=∑y F ,0=∑z F ,对方程进行约简和整理后,得到空间问题的平衡微分方程如下⎪⎪⎪⎭⎪⎪⎪⎬⎫=+∂∂+∂∂+∂∂=+∂∂+∂∂+∂∂=+∂∂+∂∂+∂∂000z yzxz z y xyzy y x zx yx x f y x z f x z y f z y x ττσττσττσ (1-1)3、物体内任一点的应力状态现在,假定物体在任一点P 的6个直角坐标面上的应力分量 ,,z y x ,σσσyx xy xz zx zy yz ττττττ===,,为已知,试求经过P 点的任一斜面上的应力。
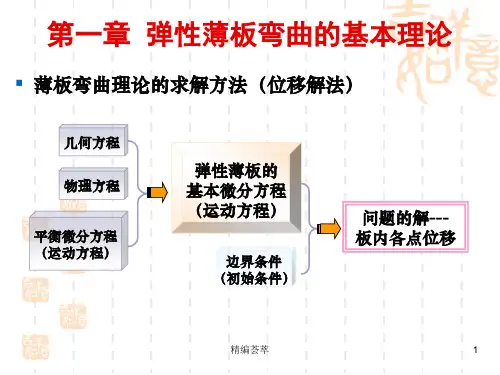
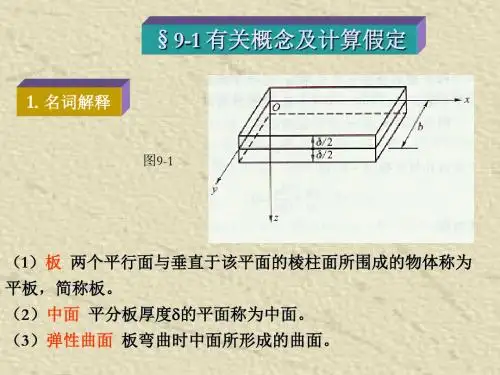
薄板的小挠度弯曲问题知识点薄板的基本概念薄板的位移与应变分量薄板广义力薄板小挠度弯曲问题基本方程薄板自由边界条件的简化薄板的莱维解矩形简支薄板的挠度基尔霍夫假设薄板应力广义位移与薄板的平衡薄板的典型边界条件薄板自由边界角点边界条件挠度函数的分解一、内容介绍薄板是工程结构中的一种常用构件,它是由两个平行面和垂直于它们的柱面所围成的物体,几何特征是其高度远小于底面尺寸,简称板。
薄板的弯曲变形属于弹性力学空间问题,由于数学求解的复杂性,因此,需要首先建立应力和变形分布的基本假设。
根据薄板的外载荷和几何特征,外力为横向载荷,厚度远小于薄板的平面宽度,可以忽略一些次要因素,引入一些基本变形假设,抽象建立薄板弯曲的力学模型。
薄板的小挠度弯曲理论是由基尔霍夫基本假设作为基础的。
根据基尔霍夫假设,采用位移解法,就是以挠度函数作为基本未知量求解。
因此,首先将薄板的应力、应变和内力用挠度函数表达。
然后根据薄板单元体的平衡,建立挠度函数表达到平衡方程。
对于薄板问题,边界条件的处理与弹性力学平面等问题有所不同,典型形式有几何边界、混合边界和面力边界条件。
二、重点1、基尔霍夫假设;2、薄板的应力、广义力和广义位移;3、薄板小挠度弯曲问题的基本方程;4、薄板的典型边界条件及其简化。
§12.1 薄板的基本概念和基本假设学习要点:本节讨论薄板的基本概念和基本假设。
薄板主要几何特征是板的中面和厚度。
首先,根据几何尺寸,定义薄板为0.5≤δ/b≥1/80,并且挠度小于厚度的五分之一,属于小挠度问题。
对于小挠度薄板,在横向载荷作用下,将主要产生弯曲变形。
根据薄板的外载荷和几何特征,外力为横向载荷,厚度远小于薄板的平面宽度,可以忽略一些次要因素,引入一些基本变形假设,抽象建立薄板弯曲的力学模型。
薄板的小挠度弯曲理论是由三个基本假设作为基础的,因为这些基本假设是由基尔霍夫首先提出的,因此又称为基尔霍夫假设。
根据上述假设建立的薄板小挠度弯曲理论是弹性力学的经典理论,长期应用于工程问题的分析。
第六章 薄板的屈曲钢结构大型梁、柱等构件,通常都由板件组合而成,为了节省材料,板件通常宽而薄,薄板在面内压力作用下就可能失稳,并由此导致整个构件的承载力下降;另外,在构件连接的节点也存在板件失稳的可能性。
因此,对板件失稳和失稳后性态的研究也是钢结构稳定的重要问题。
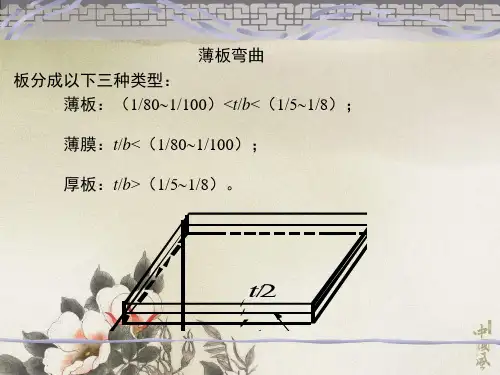
板根据其厚度分为厚板、薄板和薄膜三种。
设板的最小宽度为b ,厚度为t 。
当t /b >1/5~1/8时称为厚板,这时横向剪力引起的剪切变形与弯曲变形大小同阶,分析时不能忽略剪切变形的影响。
当1/80~1/100<t /b <1/5~1/8时称为薄板,此时横向剪力引起的剪切变形与弯曲变形相比可以忽略不计。
当板极薄,t /b <1/80~1/100时,称为薄膜,薄膜没有抗弯刚度,靠薄膜拉力与横向荷载平衡。
平分板的厚度且与板的两个面平行的平面称为中面。
本章只介绍等厚度薄板中面内受力的板的弹性失稳。
与前面所介绍过的失稳问题比较,板的失稳有如下几个特点: ⑴作用于板中面的外力,不论是一个方向作用有外力还是在两个方向同时作用有外力,屈曲时板产生的都是出平面的凸曲现象,产生双向弯曲变形,因此在板的任何一点的弯矩x M 、y M 和扭矩xy M 以及板的挠度w 都与此点的坐标(x ,y )有关。
⑵板的平衡方程属于二维偏微分方程,除了均匀受压的四边简支的理想矩形板可以直接求解其分岔屈曲荷载外,对于其他受力条件和边界条件的板,用平衡法很难求解。
可以用能量法(如瑞利—里兹法,伽辽金法)或者数值法(如差分法、有限元法等)求解屈曲荷载,在弹塑性阶段,用数值法可以得到精度很高的板屈曲荷载。
⑶理想薄板失稳属于稳定分岔失稳。
对于有刚强侧边支承的板,凸屈后板的中面会产生薄膜应变,从而产生薄膜应力。
如果在板的一个方向有外力作用而凸曲时,在另一个方向的薄膜拉力会对它产生支持作用,增强板的抗弯刚度进而提高板的强度,这种凸屈后的强度提高称为屈曲后强度。
⑷按照小挠度理论分析只能得到板的分岔屈曲荷载,而按照有限挠度理论,或称为大挠度理论分析才能得到板的屈曲后强度和板的挠度。
第六章弯曲变形 6-1概述一、度量梁变形的两个基本位移量1.挠度:横截面形心沿垂直于轴线方向的线位移。
用v 表示。
与f 同向为正,反之为负。
2.转角:横截面绕其中性轴转动的角度。
用θ 表示,顺时针转动为正,反之为负。
二、挠曲线:变形后,轴线变为光滑曲线,该曲线称为挠曲线。
其方程为:v =f (x ) 三、转角与挠曲线的关系:f xf '=⇒=θθ d d tg6-2梁的挠曲线近似微分方程及其积分 一、挠曲线近似微分方程EIx M x f )()(±='' 对于等截面直梁,挠曲线近似微分方程可写成如下形式:)()(x M x f EI -='' 二、求挠曲线方程(弹性曲线) 1.微分方程的积分)()(x M x f EI -=''1d ))(()(C x x M x f EI +-='⎰21d )d ))((()(C x C x x x M x EIf ++-=⎰⎰2.位移边界条件:0=D f ,0=D θ 支点位移条件:0=A f ,0=B f 连续条件:+-=C C f f 或右左C C f f = 光滑条件:+-=C C θθ或右左C C θθ=讨论:①适用于小变形情况下、线弹性材料、细长构件的平面弯曲。
②可应用于求解承受各种载荷的等截面或变截面梁的位移。
③积分常数由挠曲线变形的几何相容条件(边界条件、连续条件)确定。
④优点:使用范围广,直接求出较精确;缺点:计算较繁。
6-3按叠加原理求梁的挠度与转角 一、载荷叠加:多个载荷同时作用于结构而引起的变形等于每个载荷单独作用于结构而引起的变形的代数和。
二、逐段刚化法→→21f f f +=(自:总结:刚化某一段,对非钢化段进行分析,并把刚化段的载荷平移到非刚化段上,如果平移的是力,则还要加上一个力矩)6-5梁的刚度校核 一、梁的刚度条件max⎥⎦⎤⎢⎣⎡≤L f Lf[]θθ≤max 其中[θ]称为许用转角;[f/L ]称为许用挠跨比。
第6章 弹性薄板小挠度弯曲问题的基础变分原理平分板厚度的平面称为板的中面,一般地,当板的厚度t 不大于板中面最小尺寸的5/1时的板称为薄板,薄板的中面是一个平面。
薄板在垂直于中面的载荷作用下发生弯曲时,中面变形所形成的曲面称为弹性曲面或挠度面,中面内各点在未变形中面垂直方向的位移称为板的挠度。
薄板弯曲的精确理论应是满足弹性力学的全部基本方程,但这在数学上将会遇到很大的困难。
1850年,G.R.基尔霍夫(Kirchhoff Gustav Robert ,基尔霍夫 古斯塔夫·罗伯特,德国物理学家,1824-1887年)除采用弹性力学的基本假设外,还提出了一些补充的假设,从而建立起了薄板小挠度弯曲的近似理论。
这些假设是:第一,变形前垂直于板中面的直线,在板变形后仍为直线,并垂直于变形后的中面,而且不经受伸缩;第二,与中面平行的各面上的正应力z σ与应力x σ,y σ和xy τ相比属于小量;第三,在横向载荷作用下板发生弯曲时,板的中面并不伸长,这也就是说,薄板中面内各点都没有平行于中面的位移分量。
用变分法可以导出薄板弯曲问题的平衡微分方程和边界条件。
当板的形状和边界条件较复杂时,直接求解偏微分方程时比较困难的,以变分法为基础的各种近似解是求解这类问题的一个重要途径。
本章讨论了用于薄板小挠度弯曲问题的一些基础变分原理,这包括虚功原理、最小位能原理、最小余能原理、两类自变量广义变分原理并推广到三类自变量广义变分原理。
§6.1 基本方程与边界条件回顾取坐标平面oxy 与中面重合,z 轴垂直于中面,x ,y 和z 轴构成一个右手直角笛卡儿坐标系。
变形后的板内各点沿x ,y 和z 轴方向的位移分别用u ,v 和w 表示。
由Kirchhoff 假设,可以得到xwzz y x u ∂∂-=),,(,y w z z y x v ∂∂-=),,(,),(),,(y x w z y x w = (6-1)并利用弹性力学中位移与应变之间的关系式,可以得到薄板中任意点的应变分量为22x w z x ∂∂-=ε,22ywz y ∂∂-=ε,y x w z xy ∂∂∂-=γ22 (6-2)其余3个应变分量z ε,xz γ和yz γ根据假设都等于零,即0=εz ,0=γxz ,0=γyz (6-3)由薄板的平衡关系,可以确定板的横向分布载荷),(y x q 与剪力x Q ,y Q 以及弯矩x M ,y M 和扭矩xy M (x M ,y M ,xy M 统称为内力矩)与x Q ,y Q 之间的关系式。
这里要注意,x M ,y M ,xy M 是单位中面宽度内的内力矩,它们的因次是千克力,x Q ,y Q 是单位中面宽度内的内力,它们的因次是千克力/米。
弯矩、扭矩和剪力的正方向如图6-1所示。
平衡方程为⎪⎪⎪⎭⎪⎪⎪⎬⎫-=∂∂+∂∂=∂∂+∂∂=∂∂+∂∂),(y x q y Q x Q Q y M x M Q y M x M y x y y xy x xyx (6-4) 在薄板弯曲理论中,剪力x Q ,y Q 不产生应变,因而也不作功,因此可以从(6-4)式中消去x Q ,y Q ,得到0),(22222=+∂∂+∂∂+∂∂y x q yM y x M x M y xy x(6-5)以后凡提到薄板弯曲平衡方程,都是指(6-5)式而言。
而内力x Q ,y Q 不再作为独立的量看待。
上面两组方程仅仅是力的平衡方程,它们未涉及到板的材料性质。
与内力矩相对应的广义应变是挠度面的曲率xy y x k k k ,,,在小挠度弯曲理论中,它们与挠度w 的关系为22x w k x ∂∂-=,22ywk y ∂∂-=,y x w k xy ∂∂∂-=2 (6-6)内力矩与曲率的关系可以通过应变能密度U ~表示出来,若将U ~表示为xy y x k k k ,,的函数,则有xx k UM ∂∂=~,y y k U M ∂∂=~,xy xy k U M ∂∂=~21 (6-7) 这种关系式对于线性或非线性材料都成立。
对于线性的弹性体,U ~是xy y x k k k ,,的正定的二次齐次函数。
在各向同性的情况下,U ~的算式为)])(1(2)[(21~22xy y x y x k k k k k D U -μ--+= (6-8)将(6-8)式代入(6-7)式,然后再将(6-6)式代入,得到内力矩与挠度的关系式为⎪⎪⎪⎭⎪⎪⎪⎬⎫∂∂∂μ--=∂∂μ+∂∂-=∂∂μ+∂∂-=y x w DM x w y w D M y w x w D M xy y x 222222222)1()()( (6-9)以上各式中)1(1223μ-=Et D 称为板的弯曲刚度,其中t 为板的厚度,μ为材料的泊松系数。
如果我们定义}{κ为广义应变,{}M 为广义应力,即图6-1 弯矩、扭矩和剪力的正方向⎪⎪⎪⎭⎪⎪⎪⎬⎫⎪⎪⎪⎩⎪⎪⎪⎨⎧=⎪⎪⎪⎭⎪⎪⎪⎬⎫⎪⎪⎪⎩⎪⎪⎪⎨⎧∂∂∂-∂∂-∂∂-=⎪⎪⎪⎭⎪⎪⎪⎬⎫⎪⎪⎪⎩⎪⎪⎪⎨⎧=κxy y x xy y x M M M M y x w y w x w k k k }{ 22}{22222, (6-10)则有}]{[}{κ=D M (6-11)式中的][D 为弯曲刚度矩阵。
(6-8)式可以写为}]{[}{21~κκ=D U T (6-12)余应变能密度*~U 看作是内力矩x M ,y M ,xy M 的函数,其值定义为U k M k M k M U xy xy y y x x ~2~*-++= (6-13)并且有xx M U k ∂∂=*~,y y M U k ∂∂=*~,xy xy M U k ∂∂=*~2 (6-14) 同样,对于线性的弹性体,*~U 是x M ,y M ,xy M 的正定的二次齐次函数。
如果以广义应力}{M 表示余应变能密度,则有}]{[}{21~*M C M U T = (6-15)式中1][][-=D C 。
(6-12)式与(6-15)式都是以后经常要用到的表达式。
注意,对于线弹性薄板,应变能密度与余应变能密度在数值上是相等的,即*~~U U =。
将(6-9)式代入(6-5)式,得到以挠度表示的各向同性薄板的平衡方程为),()2(4422444y x q ywy x w x w D =∂∂+∂∂∂+∂∂ (6-16) 或),(22y x q w D =∇∇ (6-16/)在处理具体问题时,经常遇到坐标旋转而引起的变换。
如果坐标由oxy 转变为ξηo ,如图6-2所示,则两个坐标系中坐标的关系为⎭⎬⎫θ+θ-=ηθ+θ=ξθη+θξ=θη-θξ=cos sin ,sin cos cos sin ,sin cos y x y x y x (6-17)对于挠度w ,有),(),(ηξ=w y x w ,从而⎪⎪⎭⎪⎪⎬⎫θ∂∂+θ∂∂-=η∂∂θ∂∂+θ∂∂=ξ∂∂cos sin sin cos y wx w w yw x w w (6-18) 及二阶偏导为图6-2 坐标转换⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫θθ∂∂+θ-θ∂∂∂+θθ∂∂-=η∂ξ∂∂θ∂∂+θθ∂∂∂-θ∂∂=η∂∂θ∂∂+θθ∂∂∂+θ∂∂=ξ∂∂sin cos )sin (cos sin cos cos cos sin 2sin sin cos sin 2cos 22222222222222222222222222y w y x w x w w y w y x w x w wy w y x w x w w (6-19)弯矩、扭矩的变换公式为⎪⎪⎭⎪⎪⎬⎫θθ+θ-θ+θθ-=θ+θθ-θ=θ+θθ+θ=ξηηξsin cos )sin (cos sin cos cos cos sin 2sin sin cos sin 2cos 222222y xy x y xy x y xy x M M M M M M M M M M M M (6-20)剪力的变换公式为⎭⎬⎫θ+θ-=θ+θ=ηξcos sin sin cos y x y x Q Q Q Q Q Q (6-21)在板的弯曲问题中,有三种典型的边界条件,简述如下。
设Ω为板在xy 平面上的定义域,板的边界为C ,令n 为沿边界外向法线的方向,s 为边界的切线,(n ,s )的转向与(x ,y )的转向是一致的,如图6-3所示。
第一种边界为固支边界1C ,在这种边界上,其挠度与法向斜率均为给定的,即有n nww w φ=∂∂=,(在1C 上) (6-22) 第二种边界为简支边界2C ,在这种边界上,其挠度与法向弯矩为给定的,即有n n M M w w ==,(在2C 上) (6-23)第三种边界为自由边界3C ,在自由边界上,作用在边界上的力为给定的。
从内力和力矩看,在边界上共有三个,即n ns n Q M M ,,,但其中并不完全独立,因为从作功角度来看,ns M 和n Q 并不完全独立。
事实上,若边界上的挠度有一变分w δ,则n ns Q M ,在w δ上所作之功w δ是s w Q swM w C n nsd ]δδ[δ3⎰+∂∂-= (6-24) 利用分部积分,上式又可以写成33|δd δ)(δC ns C n nsw M s w Q sM w -+∂∂=⎰ (6-25)由(6-25)式可见,切向扭矩ns M 可以分解为沿着周边边界3C 的分布载荷sM ns∂∂及作用于3C 两端的集中力||ns M ,而3C 两端是支座(不是固支边便是简支边)。
从实际板的受力来分析,可以看到集中力||ns M 为作用在角点上,一般是影响到支座上的力,而对板的变形无影响。
图6-3 板的边界因此,分布载荷sM ns∂∂与剪力n Q 构成沿自由边界3C 上的分布力,这部分边界力的虚功为s w Q s M C n ns d δ)(3⎰+∂∂与w δ相对应的广义力为n nsQ sM +∂∂,自由边的边界条件应取为 )(,s q Q sM M M n nsn n =+∂∂= (在3C 上) (6-26))(s q 为已知的作用在3C 上的线分布载荷。
§6.2 虚功原理和功的互等定理力学上,可能位移是指满足位移连续条件的位移。
在薄板弯曲问题中只有一个广义位移),(y x w ,因此,),(y x w 可能作为可能位移的条件是:yw x w w ∂∂∂∂,,是x ,y 的连续可导函数, 并且在边界上满足连续条件:⎪⎭⎪⎬⎫=φ=∂∂=上)(在上)(在21,C ww C nww w n (6-27) 同样,由可能位移w 按式(6-10)也可得到相应的可能曲率。
可能内力是指与某种外力保持平衡关系的内力。
在薄板弯曲问题中,内力有x M ,y M ,xy M ,这三个内力组成一组可能内力的条件是:在板的内部满足平衡方程(6-5)式,在板的边界上满足条件⎪⎭⎪⎬⎫=+∂∂==上)(在上)(在32)(,C s q Q s M M M C M M n nsn n n n (6-28) 根据能量守恒定理,外力在可能位移上所作的功等于可能内力在可能应变上所作的功,通常把这一关系叫做虚功原理。