基于模糊差动制动的运动型多功能汽车防侧翻控制
- 格式:pdf
- 大小:337.56 KB
- 文档页数:5

基于差动制动技术的汽车防侧翻控制研究的开题报告一、选题背景及意义随着汽车行业的快速发展,车辆防侧翻控制技术逐渐成为汽车工程领域的一项重要研究方向。
车辆侧翻是指汽车在行驶中由于车速过高、弯道过急、路面陡坡等原因,车体向一侧倾斜到一定程度,直至失去平衡而翻车的现象。
侧翻事故不仅会对车辆及其乘员造成重大损失,还会对交通安全及社会正常秩序构成威胁,因此研究汽车防侧翻控制技术对于提高汽车行驶安全性具有重要意义。
差动制动技术是目前应用较为广泛的一种防侧翻控制技术之一。
其工作原理是利用车辆前后两轴之间的传动差异,通过适时制动来调节车身姿态,从而达到防止车辆侧翻的目的。
差动制动技术以其简单可靠、实施成本低等优点,被广泛应用于汽车工程领域中。
本文旨在研究基于差动制动技术的汽车防侧翻控制,探究其实现原理、优缺点及应用前景,为汽车工程领域的相关研究提供参考。
具体工作如下。
二、研究内容及计划1. 理论分析本文首先对汽车侧翻的物理原理及防控技术进行理论分析,探究差动制动技术的应用原理、优点及缺陷等相关问题。
2. 模型建立与仿真分析基于MATLAB和Simulink等仿真软件,建立差动制动技术在汽车防侧翻控制中的数学模型,并进行仿真分析,验证差动制动技术在防止车辆侧翻中的有效性和稳定性。
3. 实验研究借助高精度惯性测量单元、车载数据采集系统等设备,对汽车差动制动防侧翻控制系统进行实验研究,收集数据并进行分析。
通过实验数据的对比分析,验证理论模型和仿真结果的可行性和准确性。
4. 结果分析与总结根据理论分析、仿真分析和实验研究的结果,对差动制动技术在汽车防侧翻控制中的应用效果进行评估和总结,并提出相应的改进建议。
三、预期成果1. 确定差动制动技术在汽车防侧翻控制中的优势和局限性,为该技术的进一步研究提供理论基础。
2. 建立可靠的差动制动技术在汽车防侧翻控制中的数学模型,并进行仿真分析,为该技术的应用提供实验依据。
3. 设计并实现差动制动技术在汽车防侧翻控制中的实验系统,通过实验验证该技术的效果和稳定性。
运动型多功能汽车防侧翻控制与评价方法研究摘要:运动型多功能汽车(Sport Utility Vehicle,SUV)由于其良好的动力性能和通过性能,受到越来越多人的喜爱,但是,其缺点是重心比轿车高从而导致更容易发生翻车。
汽车侧翻事故作为重要的安全问题,受到大家越来越多的关注。
因此,本文以运动型多功能汽车为对象,研究了SUV汽车防侧翻动态稳定性及防侧翻控制评价方法研究。
国内外的研究学者和各大汽车厂商越来越多的关注汽车侧翻稳定性能的研究。
相对于国外,国内对车辆侧翻稳定性的研究起步较晚,运动型多功能汽车是当今世界车坛新崛起的一个车型门类。
它兼有越野车的动力性和通过性以及轿车的舒适性,既能满足追求时尚和个性的城市消费者要求,又能满足道路条件较差的农村和山区的行驶要求。
SUV车辆在高速转向行驶时,更容易侧向失稳,导致翻车事故的发生。
因此,需要提高SUV车辆高速转向时的侧翻稳定性能,本文针对SUV汽车高速转向时的侧翻稳定性能进行研究。
关键词:侧翻稳定性;车辆侧翻反应模型;侧翻预警;最坏行驶工况。
Research on the control and evaluation method of the anti-flip side of the sport multi-function vehicleAbstract:Sports Multifunctional car (Sport Utility V ehicle,SUV), due to its good dynamic performance and through performance, has been more and more people's favorite, but its disadvantage is that the center of gravity than the sedan lead to more easily overturned. As an important security issue, car rollover accidents are attracting more and more attention. Therefore, the paper studies the dynamic stability and the evaluation method of the anti-rollover control of SUV vehicle with the object of sport-type multi-function vehicle. Researchers at home and abroad and major automotive manufacturers are increasingly concerned about the stability of automotive side rollover performance. Relative to foreign countries, the research on the stability of vehicle rollover is a new type of vehicle in the world today, which starts with a late sport multi-function vehicle. It also has the power and passage of off-road vehicles and the comfort of the sedan, both to meet the pursuit of fashion and individuality of the city consumer demand, but also to meet the poor road conditions in rural and mountainous areas of the driving requirements. SUV vehicles are more prone to lateral instability when they are moving at high speeds, resulting in a rollover accident. Therefore, it is necessary to improve the performance of the rollover stability of SUV vehicles at high speed steering, aiming at the performance of the lateral rollover stability in the high-speed steering of SUV.Keywords: Side tumbling stability;V ehicle rollover reaction model;Rollover warning;The worst condition.目录1 绪论 (1)1.1引言 (1)1.2 防侧翻控制与评价方法研究的目的和意义 (2)1.3 防侧翻控制与评价方法研究的发展和现状 (3)2 车辆侧倾动力学模型的建立 (3)2.1 汽车侧倾动力学建模概述 (3)2.2 汽车侧翻动力学模型 (4)3 防侧翻控制系统设计 (5)3.1 汽车防侧翻控制方法的选择 (5)3.2 汽车防侧翻控制算法的设计 (6)4 汽车侧翻的特性及其结构特点 (7)4.1 汽车行驶时的侧翻 (7)4.2 刚性汽车的准静态侧翻 (7)4.3 带悬架汽车及瞬态侧翻的变化趋势 (9)5 汽车侧翻稳定性能的评价方法研究 (9)5.1 汽车侧翻指标 (9)5.2 汽车侧翻稳定性能的评价方法概述 (10)5.3 基于WCE方法的开发流程简介 (11)6 全文总结与展望 (12)6.1 全文总结 (12)6.2 未来展望 (13)参考文献 (15)致谢................................................ 错误!未定义书签。
基于零力矩点位置和模糊控制的商用车防侧翻控制靳立强;石冠男;于雅静;王博文【摘要】In order to prevent the rollover of vehicle, the position of zero-moment point (ZMP) is intro-duced as an indicator of vehicle rollover. According to the state of vehicle at certain moment, the y coordinate of ZMP at next coming moment is predicted,with which time to rollover(TTR) is calculated. Once the TTR at certain moment is less than the preset threshold,the vehicle anti-rollover control strategy is activated to prevent the vehicle from rollover. In this paper,PID control strategy based on fuzzy control is adopted and different braking torques are applied to different wheels to prevent vehicle rollover. Through co-simulation of TruckSim and Matlab/Simulink,the algorithm is verified. Specifically the step input test and fishhook test are conducted with differential braking fuzzy control strategy,traditional PID control strategy and no rollover control strategy respectively to measure the real time roll angle of vehicle with different control strategies. The results of comparison show that the vehicle with differential braking fuzzy control strategy has best anti-roll performance.%为了防止车辆发生侧翻,引入零力矩点的位置作为车辆侧翻的指标.根据某一时刻车辆的状态,预测下一段时间内零力矩点的y坐标,来计算该时刻的侧翻时间.一旦某时刻的侧翻时间小于设定的门限值,则激活车辆防侧翻控制策略,对车辆进行控制,防止车辆发生侧翻.本文中采用基于模糊控制的PID控制策略,对不同的车轮施加不同制动力矩,防止车辆发生侧翻.通过TruckSim和Matlab/Simulink联合仿真,对算法进行验证,对采取模糊控制差动制动策略、传统的PID策略和无侧翻控制策略的车辆,分别进行阶跃试验和鱼钩试验,测取采取不同控制策略车辆的实时侧倾角.对比结果表明,采用模糊差动制动控制策略的车辆,防侧翻性能最好.【期刊名称】《汽车工程》【年(卷),期】2017(039)009【总页数】6页(P1062-1067)【关键词】防侧翻控制;零力矩点;侧翻时间;模糊PID控制;差动制动【作者】靳立强;石冠男;于雅静;王博文【作者单位】吉林大学,汽车仿真与控制国家重点实验室,长春 130022;吉林大学,汽车仿真与控制国家重点实验室,长春 130022;吉林大学,汽车仿真与控制国家重点实验室,长春 130022;吉林大学,汽车仿真与控制国家重点实验室,长春 130022【正文语种】中文Keywords:anti-rollover control; zero-moment point; time-to-rollover;fuzzy-PID control; differential braking为防止车辆发生侧翻事故,就需要知道车辆现在的行驶状态,然后将车辆的状态传递给主动安全系统,通过计算得到车辆的侧翻可能性,然后通过主动干预,防止车辆发生侧翻。

基于模糊变结构控制的汽车防抱死制动系统的研究的开题报告一、选题背景随着汽车技术的不断发展,车辆制动系统逐渐转向电子化和智能化,其中防抱死制动系统(ABS)是最具代表性的一种。
ABS 能够通过调节刹车压力,使车轮不再完全锁定,从而防止车辆因为滑行而失控。
但是现有的 ABS 仍然存在一些问题,如控制策略不够灵活、防抱死和制动距离不能很好地平衡等。
模糊控制作为一种基于模糊数学理论的控制方法,在反应系统复杂性、不确定性等方面有着独特的优势,因此在汽车控制系统的研究中受到广泛应用。
变结构控制则能够针对不同工况下的系统动态特性进行自适应调节,从而实现更为精确的控制。
因此,本文选取基于模糊变结构控制的汽车防抱死制动系统作为研究对象,旨在通过对 ABS 控制策略的改进,提高车辆的安全性和行驶舒适度。
二、研究目标1. 参考已有研究成果,探究基于模糊变结构控制的汽车防抱死制动系统的原理和方法,并对其进行可行性分析。
2. 建立基于模糊变结构控制的汽车防抱死制动系统的数学模型,包括车辆动力学模型、制动力学模型和控制策略模型。
3. 针对目前 ABS 存在的问题,提出基于模糊变结构控制的控制策略,从而实现更为灵活、稳定的控制效果。
4. 进行仿真验证,对比分析本文提出的控制策略与传统控制策略在不同工况下的控制效果,并针对仿真结果进行优化。
三、研究内容1. 基于 ABS 控制原理,分析其数学模型及控制策略。
2. 探究模糊控制和变结构控制的原理及其在汽车控制系统中的应用。
3. 建立基于模糊变结构控制的汽车防抱死制动系统的数学模型,并设计相应的控制器。
4. 在 MATLAB/Simulink 软件中进行仿真验证,对比分析本文提出的控制策略与传统控制策略在各种工况下的控制效果,并进行优化。
四、研究意义1. 通过对 ABS 控制策略的改进,提升汽车行驶的安全性和舒适性。
2. 探究模糊控制和变结构控制等新型控制方法在汽车控制系统中的应用,丰富汽车控制技术的研究内容和方法。
基于模糊控制的重型车辆侧倾稳定性分析摘要:重型车辆侧倾稳定性一直是汽车工程中的一个核心问题。
本文基于模糊控制理论,研究了重型车辆侧倾稳定性的分析。
首先,对于重型车辆的运动模型进行了简要介绍,然后分析了车辆侧倾的成因和危害。
接着,提出了一种基于模糊控制的重型车辆侧倾稳定性控制方法,该方法可以有效地提高车辆的侧倾稳定性。
最后,通过仿真实验验证了该控制方法的有效性。
关键词:重型车辆侧倾稳定性;模糊控制;运动模型;侧倾成因和危害;仿真实验正文:一、引言重型车辆是现代物流运输中的主力军之一,特别是在运输大型物件或长距离运输的过程中,存在着一些非常困难的问题,其中最重要的问题就是车辆侧倾。
车辆侧倾是指车辆在转弯或行驶过程中,车身出现倾斜现象,如果控制不当,会导致严重的交通事故。
因此,提高重型车辆的侧倾稳定性已成为汽车工程领域的一个重要研究方向。
二、重型车辆运动模型重型车辆运动模型是研究重型车辆侧倾稳定性的基础。
在一般情况下,车辆运动模型包括车辆的运动学模型和动力学模型两部分。
其中,运动学模型描述了车辆的运动状态,如位置、速度、加速度等;动力学模型描述了车辆在外部作用下的运动规律,如力、力矩、加速度等。
三、车辆侧倾成因和危害对于重型车辆侧倾稳定性的研究,首先需要分析车辆侧倾的成因和危害。
车辆侧倾基本上是由重心偏移和侧向力的作用引起的。
侧向力是指车辆转弯或行驶过程中,路面产生的侧向力对车辆所产生的撑托力的作用。
当侧向力超过撑托力时,车辆就会倾斜,产生侧倾现象。
车辆的侧倾不仅会影响行驶的稳定性,还会导致车辆翻车等意外情况的发生。
四、基于模糊控制的车辆侧倾稳定性控制方法目前,关于重型车辆侧倾稳定性控制有很多研究,其中基于模糊控制的方法是常用的一种。
该方法利用模糊控制的优点,对车辆侧倾进行控制,以提高车辆的侧倾稳定性。
模糊控制通过对零点和增益等参数进行适当的调节,使车辆的转向灵敏度达到最佳值,并在加速、刹车等各种情况下保持车辆的侧倾稳定性。
2017年第9期(下转第85页)作者简介:宋慧新(1978-),男,硕士,主要研究方向:主动悬挂控制。
基于模糊控制的铰接车抗侧翻控制宋慧新,李翠芬(中国北方车辆研究所,北京100072)摘要:文章针对铰接矿用车辆易发生侧倾的问题,提出了抗侧翻控制系统。
应用模糊控制,建立了多级阻尼调节的抗侧翻控制规则与算法。
同时为兼顾车辆正常行驶的平顺性控制,设计了协调控制算法。
经过实车试验测试,证明了所设计的抗侧翻控制算法是有效的。
关键词:抗侧翻控制;铰接车;模糊控制铰接车辆在道路行驶时,为避开障碍物,实施紧急转向,转向过程中,由于其铰接特性,使得其转向半径过小,同时整车分布在各轮上的载荷也发生了变化,极易导致车辆侧翻。
如何通过合理控制,解决车辆侧翻问题,是设计人员面临的主要问题。
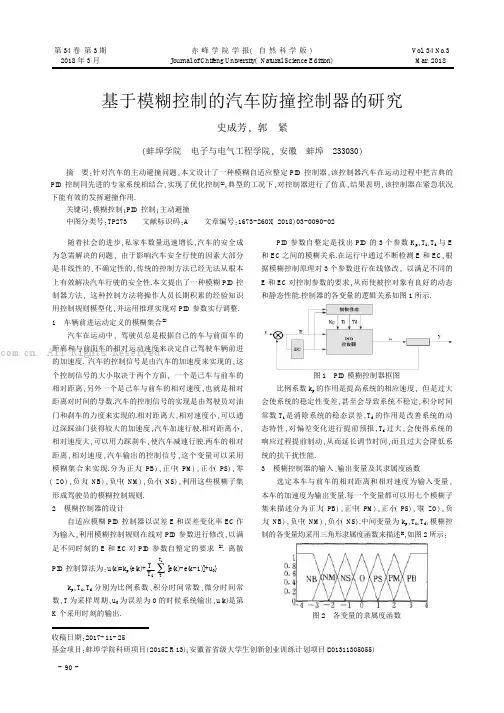
1抗侧翻控制系统构成图1抗侧翻系统原理图文章设计抗侧翻控制系统如图1所示,系统中悬架油缸配两个蓄能器,一个高压蓄能器,一个低压蓄能器,在低压蓄能器与油缸之间,设置有阻尼调节阀。
刚度的调节是通过两个蓄能器切换实现的,阻尼的调节是通过阻尼调节阀实现的。
控制器采集车速信号、车辆转角信号,横向加速度信号,通过内置的模糊控制算法,控制阻尼调节阀,形成多级阻尼调节的抗侧翻控制。
控制系统根据增加的倾角传感器,可以进行车辆是否侧坡行驶的控制;根据方向盘转角信号或运载舱相对驾驶舱的转角信号、横向加速信号、依据模糊控算法进行阻尼的控制。
2抗侧翻模糊控制算法的设计为提高抗侧翻性能,需对转向时的外侧悬架进行控制,采用模糊控制的抗侧翻控制算法,以转向角、和车速两个信号作为模糊控制的输入,以阻尼等级作为输出。
输向角的范围是[-45°~0°],用5个模糊子集来确定,即L 、LM 、MS 、S 、ZE 。
车速的范围是[0~50],用5个模糊子集来确定,即L 、LM 、MS 、S 、ZE 。
多级阻尼输出,定义为0、1、2、3、4、5、6、7,分别代表0-7级的阻尼调节。
基于主动转向和差动制动的车辆防侧翻控制徐耀耀;翁建生;金智林;冯涛【期刊名称】《计算机仿真》【年(卷),期】2011(28)6【摘要】Nowadays, active steering and differential braking are the main techniques for vehicle's rollover prevention. But the single use of active steering may modulate more wheel angle and differential braking may lead to wheel lock because of big braking force. The early warning system is also too slow based on the lateral acceleration signal. In this paper, a vehicle model for rollover was established. A new early warning method called LTR was proposed to predict vehicle's rollover early. A combination control strategy of active steering and differential braking was illustrated. In Matlab/simulink, the program was compiled. It can maintain vehicle's lane and decrease speed slowly during a certain period by changing the parameters PI and K. The result showed that the optimal control strategy can not only prevent vehicle's rollover effectively but also keep lane and avoid excessive braking force.%目前车辆防侧翻技术主要有主动转向或差动制动,但单独的主动转向会导致车轮转角调整过大,差动制动会导致制动力过大出现轮胎抱死,而且预警是依据侧向加速度信号,预警时间过慢,导致不安全.为了提高控制能力,通过建立车辆侧翻模型提出了LTR预警方法,能准确快速地计算车辆侧翻概率.并采用了主动转向和差动制动联合的防侧翻控制,在Mat-lab/simulink中设计出了联合控制算法.算法通过改变PI参数值和制动力增益系数K,既保证了不破坏车辆的车道保持功能,又减小了速度在-定时间内的下降率.仿真结果表明,优化控制防止了车辆侧翻,避免制动力过大,保证了系统安全性,确实为防侧翻控制设计提供了参考.【总页数】5页(P330-334)【作者】徐耀耀;翁建生;金智林;冯涛【作者单位】南京航空航天大学能源与动力学院,江苏,南京,210016;南京航空航天大学能源与动力学院,江苏,南京,210016;南京航空航天大学能源与动力学院,江苏,南京,210016;南京航空航天大学能源与动力学院,江苏,南京,210016【正文语种】中文【中图分类】TB24【相关文献】1.基于差动制动的防侧翻车辆动力学控制研究 [J], 何锋;杨利勇;刘章仪2.重型车辆的差动制动防侧翻控制 [J], 谢兆夫;赵亮;郭孔辉;张强3.基于主动转向与差动制动最优控制客车侧翻研究 [J], 王宁宁;方树平;李进;苑风霞4.基于主动横向稳定杆与差动制动联合控制的车辆防侧翻研究 [J], 陈松; 张红党; 吴海东; 张凤娇; 江晓莹5.重型车辆模糊差动制动防侧翻控制研究 [J], 王建锋; 刘孟因版权原因,仅展示原文概要,查看原文内容请购买。