单片机软件延时程序的设计
- 格式:pdf
- 大小:838.99 KB
- 文档页数:1
单片机延时1小时的程序摘要:1.单片机延时程序背景及应用2.单片机延时1 小时的程序实现方法3.程序代码及注释4.程序测试与优化5.总结正文:1.单片机延时程序背景及应用单片机(Microcontroller Unit,简称MCU)是一种集成度较高的微处理器,广泛应用于嵌入式系统中。
在实际应用中,单片机往往需要执行一些耗时较长的操作,例如数据传输、通讯协议处理等。
为了保证系统的稳定运行,需要对这些操作进行延时处理。
本文将介绍一种实现单片机延时1 小时的程序。
2.单片机延时1 小时的程序实现方法实现单片机延时1 小时的程序,通常可以采用以下两种方法:方法一:使用定时器/计数器定时器/计数器是单片机内部的一种功能模块,可以实现对系统运行时间的测量和控制。
通过设置定时器/计数器的初值和计数周期,可以实现不同时间的延时。
方法二:利用软件循环在程序中通过无限循环实现延时,每循环一次,延时时间减少相应的执行时间。
这种方法的延时时间取决于循环次数,需要占用较多的CPU 资源。
3.程序代码及注释以下是一个使用定时器/计数器实现单片机延时1小时的程序代码示例(以STC89C52为例):```c#include <reg52.h>#include <intrins.h>sbit LED = P1 ^ 0; // 定义LED 端口void delay(unsigned int ms) // 延时函数原型声明{unsigned int i, j;for (i = ms; i > 0; i--)for (j = 114; j > 0; j--);}void main(){TMOD = 0x01; // 定时器方式1TH0 = (65536 - 45872) / 256;TL0 = (65536 - 45872) % 256;EA = 1; // 开总中断ET0 = 1; // 开定时器0 中断TR0 = 1; // 启动定时器0while (1){P1 = _crol_(P1, 1); // LED 左右移动delay(50000); // 延时50ms}}void timer0() interrupt 1 // 定时器0 中断服务函数{TH0 = (65536 - 45872) / 256;TL0 = (65536 - 45872) % 256;}```4.程序测试与优化将编写好的程序烧写到单片机中,通过观察LED 的状态变化,验证延时效果。
HT单片机延时子程序设计单片机延时子程序设计是一种常用的程序设计技术,可以通过编程实现对系统的延时控制,实现各种功能需求。
一、延时原理在单片机中,延时的实现原理主要是基于时钟脉冲的计数器计时。
单片机的时钟频率是固定的,通常为一个定值,通过控制时钟脉冲的频率,我们可以实现不同的延时功能。
二、延时程序设计延时子程序设计通常分为两种情况:固定延时和可调延时。
下面我们将分别介绍这两种情况的延时程序设计。
1.固定延时固定延时是指延时时间是固定不变的,不受外部条件的影响。
为了实现固定延时,可以通过编程设置一个计时器,每次进行固定次数的循环,从而达到延时的目的。
下面是一个实现固定延时的示例代码:```unsigned int i, j;// do nothing, just wait}}```2.可调延时可调延时是指延时时间可以根据需要进行调整的情况。
为了实现可调延时,可以利用系统的定时器模块,设置一个定时器中断,在定时器中断服务子程序中进行延时控制。
下面是一个实现可调延时的示例代码:```#include <8051.h>#define TIMER0_H_BYTE (*((unsigned char volatile xdata *)0xFFC0))#define TIMER0_L_BYTE (*((unsigned char volatile xdata *)0xFFC1))}EA = 1; // enable interruptTH0=TIMER0_H_BYTE=0xFF;TL0=TIMER0_L_BYTE=0xFF;// do nothing, just wait for interrupt}EA = 0; // disable interrupt```在上面的例子中,通过设置定时器0的定时时间为50us,然后将延时时间转换为中断次数进行控制。
通过改变调用delay_adjustable函数时设置的延时时间,可以实现可调延时功能。
精妙的单片机非阻塞延时程序设计对于每个单片机爱好者及工程开发设计人员,在刚接触单片机的那最初的青葱岁月里,都有过点亮跑马灯的经历。
从看到那一排排小灯按着我们的想法在跳动时激动心情。
到随着经验越多,越来又会感觉到这个小灯是个好东西,尤其是在调试资源有限的环境中,有时会帮上大忙。
但对于绝大多数人,我们在最最初让灯闪烁起来时大约都会用到阻塞延时实现,会像如下代码的样子:然后,在我们接触到定时器,我们会发现,原来用定时中断来处理会更好。
比如我们可以500ms中断一次,让灯亮或灭,其余的时间系统还可以做非常之多的事情,效率一下提升了很多。
这时我们就会慢慢意识到,第一种(阻塞延时)方法效率很低,让芯片在那儿空运行几百毫米,什么也不做,真是莫大的浪费,尤其在芯片频率较高,任务又很多时,这样做就像在平坦宽阔的高速公路上挖了一大坑,出现事故可想而知。
但一个单片机中的定时器毕竟有限,如果我需要几十个或者更多不同时间的定时中断,每一个时间到都完成不同的处理动作,如何去做呢。
一般我们会想到在一个定时中断函数中再定义static变量继续定时,到了所需时间,做不同的动作。
而这样又会导致在一个中断里做了很多不同的事情,会抢占主轮询更多时间,有时甚至喧宾夺主,并也不是很如的思维逻辑。
那么有没有更好的方法来实现呢,答案是肯定的。
下面介绍我在一个项目中偶遇,一个精妙设计的非阻塞定时延时软件的设计(此设计主要针对于无操作系统的裸机程序)。
在上篇文章中有对systick的介绍,比如我要设置其10ms中断一次,如何实现呢?也很简单,只需调用core_cm3.h文件中SysTick_Config函数,当系统时钟为72MHZ,则设置成如下即可SysTick_Config(720000);(递减计数720000次后中断一次)。
此时SysTick_Handler中断函数就会10ms进入一次;任务定时用软件是如何设计的呢?且先看其数据结构,这也是精妙所在之处,在此作自顶向下的介绍:其定义结构体类型如:其中Char_Field 为一联合体,设计如下:而它内部的Timer_Bit 是一个可按位访问的结构体:此联合体的这样设计的目的将在后面的代码中体现出来。
引言概述:C51单片机是一种广泛应用于嵌入式系统中的微控制器,它具有高度集成化、易于编程和灵活性强等特点。
在C51单片机的软件开发过程中,延时程序设计是非常重要的一部分。
本文将介绍C51单片机中几种常用的延时程序设计方法,包括循环延时、定时器延时、外部中断延时等。
这些方法不仅可以满足在实际应用中对延时的需求,而且可以提高程序的稳定性和可靠性。
正文内容:一、循环延时1. 使用循环控制语句实现延时功能,例如使用for循环、while循环等。
2. 根据需要设置延时的时间,通过循环次数来控制延时的时长。
3. 循环延时的精度受到指令执行时间的影响,可能存在一定的误差。
4. 循环延时的优点是简单易用,适用于较短的延时时间。
5. 注意在循环延时时要考虑其他任务的处理,避免长时间的等待造成程序卡死或响应延迟。
二、定时器延时1. 使用C51单片机内置的定时器模块来实现延时。
2. 配置定时器的工作模式,如工作方式、定时器精度等。
3. 设置定时器的初值和重装值,控制定时器中断的触发时间。
4. 在定时器中断服务函数中进行延时计数和延时结束标志的设置。
5. 定时器延时的优点是精确可控,适用于需要较高精度的延时要求。
三、外部中断延时1. 在C51单片机上配置一个外部中断引脚。
2. 设置外部中断中断触发条件,如上升沿触发、下降沿触发等。
3. 在外部中断中断服务函数中进行延时计数和延时结束标志的设置。
4. 外部中断延时的优点是能够快速响应外部信号,适用于实时性要求较高的场景。
5. 注意在外部中断延时时要处理好外部中断的抖动问题,确保延时的准确性。
四、内部计时器延时1. 使用C51单片机内部的计时器模块来实现延时。
2. 配置计时器的工作模式,如工作方式、计时器精度等。
3. 设置计时器的初值和重装值,使计时器按照一定的频率进行计数。
4. 根据计时器的计数值进行延时的判断和计数。
5. 内部计时器延时的优点是能够利用单片机内部的硬件资源,提高延时的准确性和稳定性。
51单片机延时函数在嵌入式系统开发中,51单片机因其易于学习和使用、成本低廉等优点被广泛使用。
在51单片机的程序设计中,延时函数是一个常见的需求。
通过延时函数,我们可以控制程序的执行速度,实现定时器功能,或者在需要的时候进行延时操作。
本文将介绍51单片机中常见的延时函数及其实现方法。
一、使用for循环延时这种方法不精确,但是对于要求不高的场合,可以用来估算延时。
cvoid delay(unsigned int time){unsigned int i,j;for(i=0;i<time;i++)for(j=0;j<1275;j++);}这个延时函数的原理是:在第一个for循环中,我们循环了指定的时间次数(time次),然后在每一次循环中,我们又循环了1275次。
这样,整个函数的执行时间就是time乘以1275,大致上形成了一个延时效果。
但是需要注意的是,这种方法因为硬件和编译器的不同,延时时间会有很大差异,所以只适用于对延时时间要求不精确的场合。
二、使用while循环延时这种方法比使用for循环延时更精确一些,但是同样因为硬件和编译器的不同,延时时间会有差异。
cvoid delay(unsigned int time){unsigned int i;while(time--)for(i=0;i<1275;i++);}这个延时函数的原理是:我们先进入一个while循环,在这个循环中,我们循环指定的时间次数(time次)。
然后在每一次循环中,我们又循环了1275次。
这样,整个函数的执行时间就是time乘以1275,大致上形成了一个延时效果。
但是需要注意的是,这种方法因为硬件和编译器的不同,延时时间会有差异,所以只适用于对延时时间要求不精确的场合。
三、使用定时器0实现精确延时这种方法需要在单片机中开启定时器0,并设置定时器中断。
在中断服务程序中,我们进行相应的操作来实现精确的延时。
这种方法需要使用到单片机的定时器中断功能,相对复杂一些,但是可以实现精确的延时。

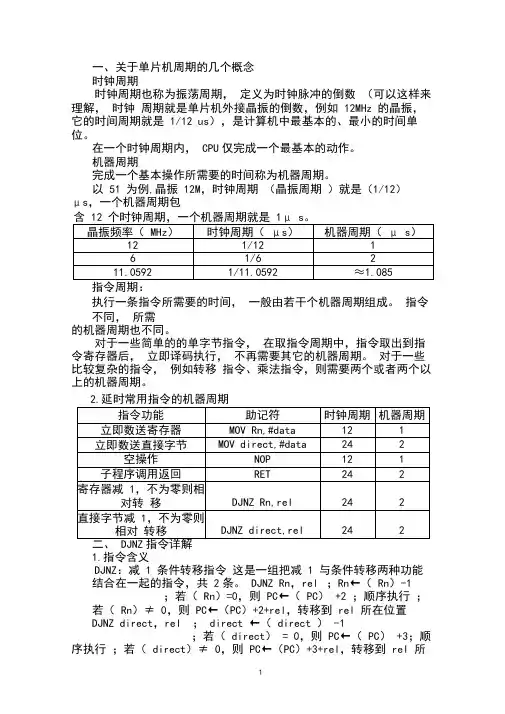
一、关于单片机周期的几个概念时钟周期时钟周期也称为振荡周期,定义为时钟脉冲的倒数(可以这样来理解,时钟周期就是单片机外接晶振的倒数,例如12MHz 的晶振,它的时间周期就是1/12 us),是计算机中最基本的、最小的时间单位。
在一个时钟周期内,CPU仅完成一个最基本的动作。
机器周期完成一个基本操作所需要的时间称为机器周期。
以51 为例,晶振12M,时钟周期(晶振周期)就是(1/12)μs,一个机器周期包含12 个时钟周期,一个机器周期就是1μ s。
指令周期:执行一条指令所需要的时间,一般由若干个机器周期组成。
指令不同,所需的机器周期也不同。
对于一些简单的的单字节指令,在取指令周期中,指令取出到指令寄存器后,立即译码执行,不再需要其它的机器周期。
对于一些比较复杂的指令,例如转移指令、乘法指令,则需要两个或者两个以上的机器周期。
2.延时常用指令的机器周期1.指令含义DJNZ:减 1 条件转移指令这是一组把减 1 与条件转移两种功能结合在一起的指令,共2条。
DJNZ Rn,rel ;Rn←(Rn)-1;若(Rn)=0,则PC←(PC)+2 ;顺序执行;若(Rn)≠ 0,则PC←(PC)+2+rel,转移到rel 所在位置DJNZ direct,rel ;direct ←(direct )-1;若(direct)= 0,则PC←(PC)+3;顺序执行;若(direct)≠ 0,则PC←(PC)+3+rel,转移到rel 所在位置2.DJNZ Rn,rel 指令详解例:MOV R7,#5DEL:DJNZ R7,DEL; r在el本例中指标号DEL三、51 单片机延时时间的计算方法和延时程序设计1.单层循环由上例可知,当Rn赋值为几,循环就执行几次,上例执行 5 次,因此本例执行的机器周期个数=1(MOV R7,#5)+2(DJNZ R7,DE)L ×5=11,以12MHz的晶振为例,执行时间(延时时间)=机器周期个数×1μs=11μ s,当设定立即数为0 时,循环程序最多执行256 次,即延时时间最多256μ s。
MSP430C延时程序设计(为了阅读方便,贴在下面)MSP430是超低功耗16位单片机,越来越受到电子工程师亲睐并得到广泛应用。
C程序直观,可读性好,易于移植和维护,已被很多单片机编程人员所采用。
MSP430集成开发环境(如IAR Embedded Workbench和AQ430)都集成了C编译器和C语言级调试器C—SPY。
但是C语言难以实现精确延时,这一直困扰着很多MSP430单片机程序员。
笔者在实际项目开发过程中,遇到很多需要严格时序控制的接口器件,如单总线数字温度传感器DSl8820、实时时钟芯片PCF8563(需要用普通]/o模拟12C总线时序)、三线制数字电位器AD8402、CF卡(Compact Flash Card)等都需要μs级甚至纳ns级精确延时;而一些慢速设备只需要ms到s级的延时。
为此,笔者提出了适合于不同延时级别需要的软件或硬件精确延时方法,并已实际应用,效果良好,大大缩短了开发周期。
1 硬件延时MSP430单片机系统程序多采用事件驱动机制,即在没有外部事件触发的情况下CPU休眠于低功耗模式中。
当外部事件到来时,产生中断激活CPU,进入相应的中断服务程序(ISR)中。
中断响应程序只完成两个任务,一是置位相应事件的标志,二是使MCU退出低功耗模式。
主程序负责使MCU在低功耗模式和事件处理程序之间切换,即在主程序中设一个无限循环,系统初始化以后直接进入低功耗模式。
MCU被唤醒后,判断各标志是否置位。
如果是单一标志置位,那么MCU执行相应的事件处理程序,完成后转入低功耗模式;若是有多个标志同时置位,主程序按照事先排好的消息队列对它们依次判别并进行处理,所有事件处理完毕以后MCU休眠,系统进入低功耗状态(该消息队列的顺序是按照任务的重要性设定的优先级)。
在这种前后台系统中,由于主程序是无限循环,就必须关闭看门狗,与其闲置,不如用其定时器的功能作硬件延时。
使用MSP430单片机看门狗定时器实现任意时长精确延时,既满足了系统实时低功耗的要求,也弥补了使用无限循环延时的时间难确定和占用CPU时间长的缺点。
单片机软件延时程序的设计一、单片机软件延时的基本原理单片机执行指令需要一定的时间,通过编写一系列无实际功能的指令循环,让单片机在这段时间内持续执行这些指令,从而实现延时的效果。
延时的时间长度取决于所使用的单片机型号、晶振频率以及所编写的指令数量和类型。
以常见的 51 单片机为例,假设其晶振频率为 12MHz,一个机器周期等于 12 个时钟周期,那么执行一条单周期指令的时间约为1μs。
通过编写一定数量的这种单周期指令的循环,就可以实现不同时长的延时。
二、软件延时程序的设计方法1、简单的空操作延时这是最基本的延时方法,通过使用空操作指令“NOP”来实现。
以下是一个简单的示例:```cvoid delay_nop(unsigned int n){unsigned int i;for (i = 0; i < n; i++){_nop_();}}```这种方法的延时时间较短,而且不太精确,因为实际的延时时间还会受到编译器优化等因素的影响。
2、基于循环的延时通过使用循环来执行一定数量的指令,从而实现较长时间的延时。
以下是一个基于循环的延时函数示例:```cvoid delay_ms(unsigned int ms){unsigned int i, j;for (i = 0; i < ms; i++){for (j = 0; j < 120; j++)_nop_();}}}```在这个示例中,通过内外两层循环来增加延时的时间。
需要注意的是,这里的循环次数是根据实验和估算得出的,实际的延时时间可能会有一定的偏差。
3、更精确的延时为了实现更精确的延时,可以根据单片机的机器周期和指令执行时间来精确计算延时的循环次数。
例如,对于12MHz 晶振的51 单片机,要实现 1ms 的延时,可以这样计算:1ms =1000μs,一个机器周期为1μs,执行一条指令需要 1 到 4 个机器周期。
假设平均每条指令需要 2 个机器周期,那么要实现1000μs的延时,大约需要执行 2000 条指令。
单片机汇编语言设计软件延时程序引言:在单片机编程中,经常需要使用延时函数来控制程序的执行时间,例如等待外设初始化完成、延迟发送数据等。
本文将介绍使用汇编语言设计的延时函数。
一、延时原理在单片机中,延时的实现主要通过定时器或循环计数的方式来实现。
定时器通常会使用内部时钟源来产生时钟信号,然后通过预设的计数值来控制定时时间。
循环计数方式则是通过程序在指定循环内部执行空操作的次数来实现延时。
二、定时器延时定时器延时的实现比较简单,只需要设置定时器的计数值和相关控制寄存器即可。
1.使用定时器0延时定时器0是一种常用的定时器,可通过T0计数器、定时器控制寄存器TCON和定时器模式控制寄存器TMOD来实现。
例如,以下是一个使用定时器0的延时函数的实现示例:```assemblydelay_us PROCMOV R4,16 ; 假设使用的是12MHz的晶振,所以每个机器周期为1/12MHz=83.33ns,16个机器周期为1.33usMOVR5,FFH;设置循环的次数delay_usroutine:NOP;执行空操作,延时一个机器周期DJNZ R5,delay_usroutine ;循环R5次RETdelay_us ENDPdelay_ms PROCMOV R7,4 ; 延时1ms需要延时四次1usLOOP:CALL delay_usDJNZR7,LOOPRETdelay_ms ENDP```在上述代码中,delay_us过程使用了16次空操作进行延时,该延时约为1.33us。
delay_ms过程通过循环调用delay_us过程实现了1ms的延时。
2.使用定时器1延时定时器1是使用T1计数器、定时器控制寄存器TCON和定时器模式控制寄存器TMOD来实现的。
例如,以下是一个使用定时器1的延时函数的实现示例:```assemblydelay_us PROCMOV R4,16 ; 假设使用的是12MHz的晶振,所以每个机器周期为1/12MHz=83.33ns,16个机器周期为1.33usMOVR5,FFH;设置循环的次数delay_usroutine:NOP;执行空操作,延时一个机器周期DJNZ R5,delay_usroutine ;循环R5次RETdelay_us ENDPdelay_ms PROCMOV R7,4 ; 延时1ms需要延时四次1usLOOP:CALL delay_usDJNZR7,LOOPRETdelay_ms ENDP```在上述代码中,delay_us过程使用了16次空操作进行延时,该延时约为1.33us。
引言:单片机非阻塞延时程序设计是嵌入式系统开发中常见的一项技术,它允许程序在延时期间保持对其他任务或事件的响应能力,提高系统的并发性和响应性。
在本文中,我们将介绍一些精妙的单片机非阻塞延时程序设计技巧和方法。
概述:单片机的延时是指在程序执行过程中暂停一段时间,通常使用软件实现。
传统的阻塞延时会导致系统无法进行其他操作,而非阻塞延时可以在延时期间处理其他任务,提高系统的性能。
在本文中,我们将详细介绍单片机非阻塞延时的设计思路和实现方法。
正文内容:一、使用定时器进行非阻塞延时1. 建立一个定时器中断服务函数2. 在定时器中断服务函数中记录系统时钟的增量3. 在其他任务或主循环中比较当前系统时钟与目标延时时钟的差值4. 根据差值判断是否达到延时要求,如果达到则执行相应任务,否则继续执行其他任务5. 定时器中断服务函数可以通过硬件定时器或软件模拟定时器实现二、使用状态机进行非阻塞延时1. 设计一个状态机,用于记录延时的状态和时间2. 在每个系统周期中更新状态机的状态和时间3. 在其他任务或主循环中根据状态机的状态和时间判断是否达到延时要求4. 如果达到延时要求则执行相应任务,否则继续执行其他任务5. 状态机可以使用有限状态机(FSM)或无限状态机(ISM)进行实现三、使用软件计时器进行非阻塞延时1. 定义一个软件计时器数据结构,包含计时器的起始时间和目标延时时间2. 在每个系统周期中更新软件计时器的时间3. 在其他任务或主循环中比较当前时间与计时器的目标延时时间4. 根据比较结果判断是否达到延时要求,如果达到则执行相应任务,否则继续执行其他任务5. 软件计时器可以使用定时器对比计时(TC)或系统滴答计时器(SysTick)进行实现四、使用多线程进行非阻塞延时1. 在系统中引入多线程机制,每个线程可以独立执行任务2. 在延时线程中设置延时时间,并在其他线程中判断是否达到延时要求3. 如果达到延时要求则执行相应任务,否则继续执行其他任务4. 多线程可以使用操作系统(RTOS)或轻量级线程库进行实现5. 注意线程之间的同步和互斥机制,以避免竞争条件和死锁的发生五、使用事件驱动的非阻塞延时1. 建立一个事件驱动框架,用于处理各种事件和任务2. 在任务中设置延时要求,并在其他任务或事件中判断是否达到延时要求3. 如果达到延时要求则触发相应的事件,执行相应任务,否则继续执行其他任务4. 事件驱动可以使用消息队列、信号量或触发器进行实现5. 注意事件的优先级和处理顺序,以确保延时任务的准确性总结:单片机非阻塞延时程序设计是嵌入式系统开发中的重要技术,可以提高系统的并发性和响应性。
用单片机C语言精确延时(定时)的方法用单片机C语言精确延时(定时)的方法C语言的设计目标是提供一种能以简易的方式编译、处理低级存储器、产生少量的机器码以及不需要任何运行环境支持便能运行的编程语言。
那么用单片机C语言精确延时(定时)的方法都是怎样的呢?以下仅供参考!由于单片机C语言下利用软件延时不容易做到精确的定时,所以很多人在编写延时子程序的时候不能好好的把握延时的具体时间。
C 语言下,延时程序主要有以下几种:一:void delay(unsigned char k){unsigned char i,k; //定义变量for(i=0;i<k;i++); //for循环语句}该程序在Keil环境下,会先将C语言转化成汇编语言,那么我们就可以根据汇编语言来计算出精确的`时间,转化具体步骤如下:CLR A ;指令1MOV R7,A ;指令2LOOP:INC R7 ;指令3CJNE R7,k,LOOP ;指令4这里,指令1,指令2和指令3各消耗1个机器周期,指令4消耗两个机器周期(可查文末附录表),而在12M的晶振下一个机器周期是1us,在这个过程中,指令1和指令2分别执行1次,即消耗1+1us,而指令3和指令4分别执行了k次,那么这样加起来,这个延时子程序所消耗的具体时间就是t=1+1+(1+2)*k=3k+2us。
呵呵,这样说来,如果我们定义的k为100的话,这个延时子程序的精确时间就是302us。
二:void delay(unsigned char i){while(--i){;}}同样的道理,将其反汇编,可以看到,只有一条语句:DJNZ i,$;该语句消耗2us,一共执行i次,所以总共消耗时间t=i*2us。
三:下面的将形参换为整形int,这样的话,反汇编所执行的语句完全不同,用个具体的数字做例子:void delay(){unsigned int i=10000;while(--i);}反汇编后:4: unsigned int i=10000;C:0x0003 7F10 MOV R7,#0x10C:0x0005 7E27 MOV R6,#0x275: while(--i)6: ;C:0x0007 EF MOV A,R7C:0x0008 1F DEC R7C:0x0009 7001 JNZ C:000CC:0x000B 1E DEC R6C:0x000C 14 DEC AC:0x000D 4E ORL A,R6C:0x000E 70F7 JNZ C:0007具体计算如下1.R7经过10H(16)次循环减为0:t1=10H*(1+1+2+1+1+2)2.R6经过27H*256次循环减为0:t2=27H*256*(1+1+2+1+1+2)+27H*13.最后R7的是变为255,因此还要多出255次的循环:t3=255*(1+1+2+1+1+2)4.加上之前消耗的2us,总消耗时间:T=2+10H*(1+1+2+1+1+2)+27H*256*(1+1+2+1+1+2)+27H*1+255*(1+1+2+1+1+2)=2+16*7+39*256*7+39*1+255*7=71826us大约为72ms吧如果定义一个unsigned int i,那么延时计算公式为T=2+(i%256)*7+(i/256)*256*7+i/256+255*7关于其他类型的延时程序都可以按照这个方法对时间进行较为精确的计算。