4.2 相位法测距汇总
- 格式:ppt
- 大小:1.27 MB
- 文档页数:38

相位法激光测距的理论设计(综合最新版)第一篇:相位法激光测距的理论设计(综合最新版)相位法激光测距的理论设计摘要本文介绍了半导体激光技术,并在传统的相位法激光测距原理的基础上, 参考激光测距光学系统设计,运用数字相关检测的测量方法,提出一种把直接数字频率合成(DDS)技术和数字信号处理(DSP)技术相结合的新的相位激光测距理论设计,这种设计有助于简化电路、提高相位测距的精度。
关键词:相位激光测距,数字相关检测,数字信号Phase Type Laser Ranging Theoretical Design This article introduced the semiconductor laser technology, and in the traditional phase laser ranging principle foundation, the reference laser ranging optical system design, Using digital correlation detection measuring technique,proposing one kind the new phase laser ranging theoretical design which(DDS)technical and the digital signal processing(DSP)the technology unifies the direct digital frequency synthesis, for could overcome in the traditional phase range finder method the precision to enhance, the measuring range with difficulty difficulty with increases, the electric circuittoo is complex and so on the shortcoming provides has been possible to supply the reference the theoretical design.Key word:PHASE LASER RANGING,DIGITAL CORRELATION DETECTION,DIGITAL SIGNAL目录第一章引言 (4)第二章国内外研究状况.................................................................................................5 第三章激光测距光学系统 (7)3. 1 激光测距仪的系统结构.........................................................................................7 3.2光学系统图示..........................................................................................................8 3.3 光学系统设计主要部件功能与作用.....................................................................9 3.4 主要参考性能数据...............................................................................................10 第四章数字相关检测技术改进方法设计. (11)4. 1 激光相位式测距的基本原理.............................................................................11 4.2 数字信号处理(DSP)的简述 (13)4.2.1 数字信号处理的主要研究内容....................................................................14 4.2.2 测试信号数字化处理的基本步骤................................................................14 4.2.3 数字处理信号的优势....................................................................................15 4.3 直接数字频率合成技术 (15)4.3.1 DDS的基本工作原理....................................................................................16 4.4 改进的数字测相的框图设计...............................................................................16 第五章小结. (22)参考文献.............................................................................................................23 致谢........................................................................................................................... (24)第一章引言第一章引言激光,是一种自然界原本不存在的,因受激而发出的具有方向性好、亮度高、单色性好和相干性好等特性的光。
§4.2 相位式光电测距仪的工作原理相位式光电测距仪的种类较多,但其基本的工作原理是相同的。
本节将讨论相位式光电测距仪的工作原理,并着重介绍它的几个主要部件的工作原理。
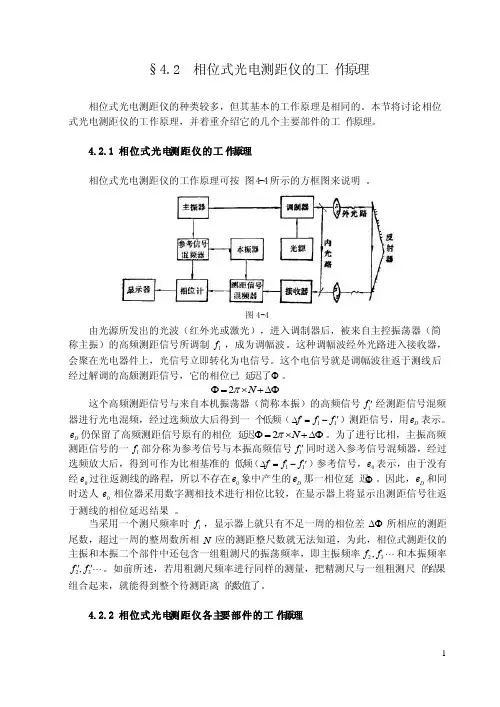
4.2.1 相位式光电测距仪的工作原理相位式光电测距仪的工作原理可按图4-4所示的方框图来说明。
图4-4由光源所发出的光波(红外光或激光),进入调制器后,被来自主控振荡器(简称主振)的高频测距信号所调制1f ,成为调幅波。
这种调幅波经外光路进入接收器,会聚在光电器件上,光信号立即转化为电信号。
这个电信号就是调幅波往返于测线后经过解调的高颇测距信号,它的相位已延迟了Φ。
∆Φ+⨯=ΦN π2这个高频测距信号与来自本机振荡器(简称本振)的高频信号1f '经测距信号混频器进行光电混频,经过选频放大后得到一个低频(11f f f '-=∆)测距信号,用D e 表示。
D e 仍保留了高频测距信号原有的相位延迟∆Φ+⨯=ΦN π2。
为了进行比相,主振高频测距信号的一1f 部分称为参考信号与本振高频信号1f '同时送入参考信号混频器,经过选频放大后,得到可作为比相基准的低频(11f f f '-=∆)参考信号,0e 表示,由于没有经0e 过往返测线的路程,所以不存在0e 象中产生的D e 那一相位延迟Φ。
因此,D e 和同时送人0e 相位器采用数字测相技术进行相位比较,在显示器上将显示出测距信号往返于测线的相位延迟结果。
当采用一个测尺频率时1f ,显示器上就只有不足一周的相位差∆Φ所相应的测距尾数,超过一周的整周数所相N 应的测距整尺数就无法知道,为此,相位式测距仪的主振和本振二个部件中还包含一组粗测尺的振荡频率,即主振频率 32,f f 和本振频率 32,f f ''。
相位测距原理相位测距是一种常见的测距方法,它利用波的相位变化来实现测距。
在相位测距中,我们通常使用电磁波或激光作为传感器,通过测量波的相位变化来计算目标物体与传感器之间的距离。
相位测距原理基于波的传播速度和波长的关系,通过测量波的相位变化来确定距离,具有高精度和远距离测量的优点,因此在许多领域得到了广泛应用。
首先,让我们来了解一下相位测距的基本原理。
在相位测距中,我们通常使用连续波或调制波来发送信号。
当这些波与目标物体相互作用时,它们的相位会发生变化。
通过测量波的相位变化,我们可以计算出目标物体与传感器之间的距离。
在实际应用中,我们通常会使用相位差来表示距离,通过测量波的相位差来计算出目标物体与传感器之间的距离。
在相位测距中,我们需要考虑波的传播速度和波长的关系。
波的传播速度是一个常数,而波长则取决于波的频率。
通过测量波的相位变化,我们可以确定波长的变化,进而计算出距离的变化。
因此,相位测距原理是基于波长的变化来实现距离的测量。
除了波长的变化,相位测距还需要考虑波的相位变化。
在相位测距中,我们通常会使用相位差来表示距离。
相位差是指两个波的相位之差,通过测量相位差的变化,我们可以计算出目标物体与传感器之间的距离。
因此,相位测距原理是基于相位差的变化来实现距离的测量。
在实际应用中,相位测距可以通过多种方式来实现。
例如,我们可以使用光学传感器来发送激光,并通过测量激光的相位变化来计算距离。
我们也可以使用雷达来发送电磁波,并通过测量电磁波的相位变化来实现距离的测量。
无论是光学传感器还是雷达,相位测距都可以实现高精度和远距离的测量,因此在许多领域得到了广泛应用。
总之,相位测距原理是一种基于波的相位变化来实现距离测量的方法。
通过测量波的相位变化和相位差的变化,我们可以计算出目标物体与传感器之间的距禿。
相位测距具有高精度和远距离测量的优点,在许多领域得到了广泛应用。
希望通过本文的介绍,读者对相位测距原理有了更深入的了解。
《相位法激光测距仪设计》(原创实用版)目录一、引言二、相位法激光测距仪的原理与结构1.相位法激光测距仪的工作原理2.相位法激光测距仪的结构组成三、相位法激光测距仪的关键技术1.欠采样技术与同步检测原理2.晶体滤波器和直接数字频率合成计3.数字鉴相器的设计四、相位法激光测距仪的性能提升1.整体结构和性能的改进2.数字化与自动化程度的提高3.测距仪适用性的增强五、结论正文一、引言激光测距仪是一种非接触式的测量仪器,它可以通过激光束来测量目标物体的距离。
根据测距方法的不同,激光测距仪可以分为相位法激光测距仪和脉冲法激光测距仪两类。
相位法激光测距仪利用检测发射光和反射光空间传播中的相位差来检测距离,具有较高的精度和较远的测量范围。
因此,在许多应用场合,相位法激光测距仪已经成为了首选的测距工具。
本文将从相位法激光测距仪的原理、结构、关键技术以及性能提升等方面进行详细介绍。
二、相位法激光测距仪的原理与结构(一)相位法激光测距仪的工作原理相位法激光测距仪的工作原理是利用激光器发出一束激光,经过调制后射向目标物体,然后通过接收器接收目标物体反射回的激光束。
在接收过程中,通过检测发射光和反射光之间的相位差来计算目标物体与测量仪器之间的距离。
具体来说,相位法激光测距仪通过测量激光束的发射和接收之间的时间差,结合光速,可以计算出目标物体与测量仪器之间的距离。
(二)相位法激光测距仪的结构组成相位法激光测距仪主要由激光器、调制器、发射器、接收器、相位检测器和数据处理器等组成。
激光器负责发射激光束,调制器负责对激光束进行调制,发射器负责将激光束射向目标物体,接收器负责接收目标物体反射回的激光束,相位检测器负责检测发射光和反射光之间的相位差,数据处理器负责对检测到的相位差进行处理,从而计算出目标物体与测量仪器之间的距离。
三、相位法激光测距仪的关键技术(一)欠采样技术与同步检测原理在相位法激光测距仪中,欠采样技术与同步检测原理是一种常用的测相方法。
多载频相位法测距
多载频相位法测距是一种基于相位测量的高精度测距技术。
与传统的单一载频相位法测距相比,多载频相位法测距通过使用多个不同的载频信号进行测距,可以有效地提高测距精度和可靠性。
相位法测距的基本原理是通过测量发射信号与接收信号之间的相位差来确定目标距离。
当发射信号经过目标反射后,由于传播路径上的时间延迟,接收信号的相位会发生变化。
通过测量这个相位差,可以计算出目标距离。
在多载频相位法测距中,系统使用多个不同的载频信号进行发射和接收。
每个载频信号都具有不同的波长和相位特性。
当信号经过目标反射后,系统会同时接收到多个载频信号的反射信号。
通过对这些反射信号进行相位测量,可以得到多个相位差值。
由于不同载频信号的波长不同,它们在相同距离上产生的相位差也不同。
因此,通过比较不同载频信号的相位差值,可以消除由于系统误差、多径效应等因素引起的误差,从而提高测距精度。
此外,多载频相位法测距还可以通过优化算法和数据处理技术进一步提高测距性能。
例如,可以利用最小二乘法等数学方法对多个相位差值进行拟合,得到更精确的测距结果。
同时,还可以采用多径抑制、抗干扰等技术来降低干扰因素对测距精度的影响。
总之,多载频相位法测距是一种高精度、高可靠性的测距技术,广泛应用于各种需要精确测量距离的场景,如无人机导航、卫星定位、雷达探测等领域。
1。
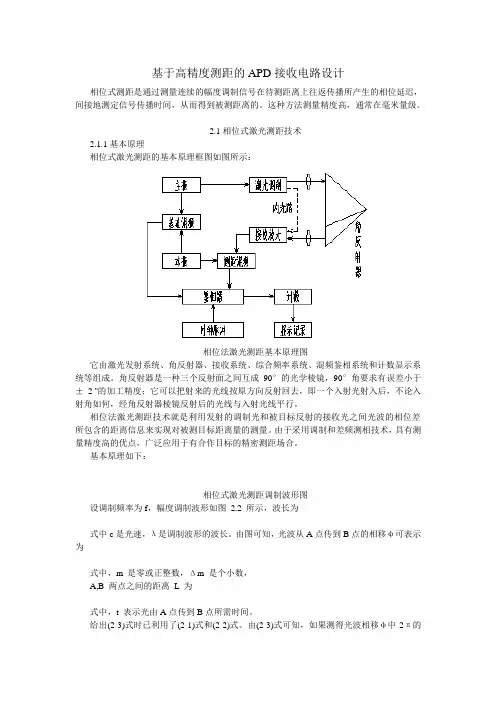
基于高精度测距的APD接收电路设计相位式测距是通过测量连续的幅度调制信号在待测距离上往返传播所产生的相位延迟,间接地测定信号传播时间,从而得到被测距离的。
这种方法测量精度高,通常在毫米量级。
2.1相位式激光测距技术2.1.1基本原理相位式激光测距的基本原理框图如图所示:相位法激光测距基本原理图它由激光发射系统、角反射器、接收系统、综合频率系统、混频鉴相系统和计数显示系统等组成。
角反射器是一种三个反射面之间互成90°的光学棱镜,90°角要求有误差小于±2 ''的加工精度;它可以把射来的光线按原方向反射回去,即一个入射光射入后,不论入射角如何,经角反射器棱镜反射后的光线与入射光线平行。
相位法激光测距技术就是利用发射的调制光和被目标反射的接收光之间光波的相位差所包含的距离信息来实现对被测目标距离量的测量。
由于采用调制和差频测相技术,具有测量精度高的优点,广泛应用于有合作目标的精密测距场合。
基本原理如下:相位式激光测距调制波形图设调制频率为f,幅度调制波形如图 2.2 所示,波长为式中c是光速,λ是调制波形的波长。
由图可知,光波从A点传到B点的相移φ可表示为式中,m 是零或正整数,Δm 是个小数,A,B 两点之间的距离L 为式中,t 表示光由A点传到B点所需时间。
给出(2-3)式时已利用了(2-1)式和(2-2)式。
由(2-3)式可知,如果测得光波相移φ中2π的整数m 和小数Δm ,就可由(2-3)式确定出被测距离L,所以调制光波被认为是相位式激光测距仪测量距离的一把度量标准,可以形象的称之为“光尺”。
不过,用一台测距仪直接测量A和B两点光波传播的相移是非常困难的,因此采用在B点设置一个反射器(即所谓合作目标),使从测距仪发出的光波经反射器反射再返回测距仪,然后由测距仪的测相系统对光波往返一次的相位变化进行测量。
图 2.3示意地表示光波在距离L 上往返一次后的相位变化。
《相位法激光测距仪设计》【原创版】目录一、引言二、相位法激光测距仪的原理与结构1.相位法测距原理2.激光测距仪的结构组成三、相位法激光测距仪的设计方法1.欠采样技术与同步检测原理2.晶体滤波器和直接数字频率合成计四、实验结果与分析1.系统整体结构和性能改进2.数字化与自动化程度提高3.测距仪的适用性增强五、结论正文一、引言激光测距仪是一种非接触式的测量仪器,它利用激光束进行测量,具有高精度、高可靠性、易于操作等优点。
根据测距方法的不同,激光测距仪可以分为相位法激光测距仪和脉冲法激光测距仪两类。
相位法激光测距仪通过检测发射光和反射光之间的相位差来测量距离,具有较高的测量精度和较远的测量范围。
因此,本文将重点介绍相位法激光测距仪的设计方法。
二、相位法激光测距仪的原理与结构1.相位法测距原理相位法激光测距仪的原理是利用激光束从发射到接收所产生的相位差来测量距离。
具体来说,激光束从发射器发射后,经过一定距离后反射回接收器,接收器通过检测发射光和反射光之间的相位差来计算距离。
2.激光测距仪的结构组成激光测距仪主要由激光发射器、激光接收器、相位检测器、距离计算器和显示器等组成。
激光发射器负责发射激光束,激光接收器负责接收反射回来的激光束,相位检测器负责检测激光束的相位差,距离计算器负责根据相位差计算距离,显示器负责显示距离信息。
三、相位法激光测距仪的设计方法1.欠采样技术与同步检测原理为了降低数据处理的复杂程度,可以在相位式测距仪中采用欠采样技术与同步检测原理改进测相方法。
欠采样技术可以有效地降低数据处理的采样频率,从而降低数据处理的复杂程度;同步检测原理可以实现对激光束的实时检测,从而提高测量精度。
2.晶体滤波器和直接数字频率合成计为了改进测距仪的滤波与调制手段,可以采用晶体滤波器和直接数字频率合成计(DDS)。
晶体滤波器可以有效地滤除激光束中的杂波,从而提高测量精度;直接数字频率合成计可以实现对激光束的频率调制,从而提高测量范围。
激光相位法测距的原理激光相位测距中,把连续的激光进行幅度调制,调制光的光强随时间做周期性变化,测定调制光往返过程中所经过的相位变化即可求出时间和距离。
图.1 相位式激光测距原理示意图如图1所示,设发射处与反射处(提升容器)的距离为x ,激光的速度为c ,激光往返它们之间的时间为t ,则有:cxt 2设调制波频率为f ,从发射到接收间的相位差为 ,则有:N cfxft 242 (2) 其中,N 为完整周期波的个数, 为不足周期波的余相位。
因此可解出:)(2)22(24N N fcN f c f c x(3) 其中,f c L s 2 称为测尺或刻度,N 即是整尺数, 2 N 为余尺。
根据测得的相位移的大小,可知道N 余尺的大小。
而整尺数N 必须通过选择多个合适的测尺频率才能确定,测尺频率的选择是提升容器精确定位的关键因素之一。
多尺测量方法测量正弦信号相移的方法都无法确定相位的整周期数,即不能确定出相位变化中 2的整倍数N ,而只能测量不足 2的相位尾数 ,因此公式(2.3)中的N 值无法确定,使该式产生多个解,距离D 就不能确定。
解决此缺陷的办法是选用一个较低的测尺频率s f ,使其测尺长度s L 稍大于该被测距离,这种状况下不会出现距离的多值解。
但是由于测相系统的测相误差,会导致测距误差,并且选用的s L 越大则测距误差越大。
因此为了得到较高的测距精度而使用较短的测尺长度,即较大的测尺频率s f ,系统的单值测定距离就相应变小。
为了解决长测程和高精度之间的矛盾,一般使用的解决办法是:当待测距离D 大于基本测尺sb L (精测测尺)时,可再使用一个或几个辅助测尺sl L (又叫粗测测尺),然后将各个测尺测得的距离值组合起来得到单一的和精确的距离信息。
由此可见,用一组测尺共同对距离D 进行测量就可以解决距离的多值解,即用短尺保证精度,用长尺保证量程。
这样就解决高精度和长测程的矛盾[4]。
本系统选用10米作为精尺,1000米作为粗尺,带入公式即可求得精尺频率和粗尺频率:精尺频率 MHz L cf 152510(4) 粗尺频率 kHz L cf 150210001000 (5) 其中,光速s m c /1038 。
相位测距基本原理相位式激光测距是通过测量连续的调制光波往返距离产⽣的相位延迟,间接的测定光在空⽓中往返于待测⽬标间的飞⾏时间,从⽽求出被测距离。
由激光调制发射系统、反射器、光电探测接收系统、频率综合部分(本振信号产⽣)、相位测量、以及显⽰部分组成。
由于测距的调制信号频率⽐较⾼,如果直接测量相位信息,则对测相芯⽚的分辨率要求⽐较⾼,⽽且误差⽐较⼤。
因此通常测距仪都采⽤了混频测相的⽅式对,⾼频信号与本振信号进⾏差频然后得到中低频信号,进⾏相位⽐较,后续通过AD转换和单⽚机把相位差信息转换成我们所需要的距离信息并且显⽰出来。
频率选择根据测距仪的设计需要,⽐如:测量精度、量程、计算简便,选择合适的测尺频率。
测尺频率可由下式确定:相位测量技术相位式激光测距仪中测距光波被接收以后通过测量相位差来计算光波飞⾏时间,因此相位测量是测距仪中关系到测距精度的⼀个关键部分。
主要的数字相位测量⽅法有以下⼏种:⾃动数字测相、⽋采样同步检测法、向量内积法。
由于相位式激光测仪的测距要求精度⽐较⾼,测距光波的调制频率⽐较⾼,因此直接进⾏相位测量,则对器件的要求⽐较⾼,现在⼀般都⾤⽤混频的⽅式与数字检相搭配使⽤,这样可以先把⾼频信号差频成中频或低频信号,然后再进⾏相位⽐较。
激光测距仪的总体设计1)采⽤波长为650mn的半导体激光器做光源,雪崩⼆极管做光电探测器;2)选⽤单⼀的直接测尺⽅式,测尺频率为lOMHz ,本地振荡信号频率为9.995MHz;3)⽤AD8002A做光电探测器前置放⼤电路和带通滤波器;4)⽤于测相的混频输出信号为5KHz,理论测尺长度为15⽶。
测相精度在毫⽶量级;5)使⽤AD8302做测相芯⽚,模数转换芯⽚将模拟信号转换成数字信号,传送给单⽚机控制系统,并且通过LCD显⽰出距离;6)采⽤窄带⼲涉滤光⽚来抑制带外噪声。
激光调制:利⽤有源晶体振荡器来产⽣lOMHz的⾼频振荡信号接⼊调制电路V端,测距回波接收部分光电器件:APD硅光电⼆极管在体积、响应速度、可靠性上相⽐其他元件都有⾮常好的特性,特别是硅材料制成的雪崩光电⼆极管(Avalanche Photo Diode,简称APD)。