无人机电机型号
- 格式:docx
- 大小:14.26 KB
- 文档页数:1
航模3505电机参数全文共四篇示例,供读者参考第一篇示例:航模3505电机是一种常见的直流无刷电机,广泛应用于航模飞行器的动力系统。
它具有高效率、低噪音、稳定性好等特点,因此备受模型飞行爱好者的青睐。
下面我们将详细介绍航模3505电机的参数及其性能特点。
首先,我们来看一下航模3505电机的基本参数。
该电机的直径为35mm,长度为05mm,轴径为3mm,重量约为50克。
工作电压范围为2-4S锂电池,推荐使用3S电池,额定电压为11.1V。
电机的空载转速约为1500-12000转/分钟,最大功率可达150W,最大电流为15A,电机内阻为0.11Ω。
航模3505电机的性能特点主要包括以下几个方面:1.高效率:航模3505电机采用无刷电机设计,具有高效率和低能耗的特点。
在相同功率下,比传统有刷电机更省电,运行更稳定。
2.低噪音:由于航模3505电机采用了无刷电机技术,相对于有刷电机来说噪音更低,工作时几乎没有嗡嗡声,能够更好地保护用户的听力。
3.稳定性好:航模3505电机采用了高品质的材料和先进的生产工艺,具有出色的稳定性和耐用性。
在长时间高速运转也不易受损,寿命较长。
4.适配性强:电机的设计尺寸紧凑,重量轻,适用于多种航模飞行器,如固定翼飞机、直升机、四旋翼等,灵活方便。
5.易安装:航模3505电机安装简便,只需将电机与飞行控制器连接,加装适当的电调和螺旋桨即可投入使用。
对于初学者和DIY爱好者来说,是一个理想的选择。
总的来说,航模3505电机作为一种高性能、多功能的直流无刷电机,适用于各种模型飞行器的动力系统,具有较好的可靠性和稳定性,是模型飞行爱好者的首选之一。
希望以上介绍能够帮助大家更深入了解航模3505电机的参数及性能特点,选择适合自己的电机,享受飞行的乐趣。
第二篇示例:【航模3505电机参数】航模3505电机是一款性能稳定、品质可靠的无刷直流电机,广泛用于遥控模型飞机、无人机和车辆等领域。
本文将详细介绍航模3505电机的参数及特点。

常用无人机型号及参数4:神龙SLA-4800
神龙SLA-4800
产品介绍:
神龙SLA多轴无人机是技术领先的垂直起降微型自动驾驶无人飞行器,可用于执行空中定点监测、资料收集、协调指挥、搜索、测量、通讯、检测、侦查等多种空中任务。
SLA-4800的机体和云台完全采用碳纤维材料制造,拥有更轻的重量和更高的强度。
SLA-4800集成了多种高精度传感器和卓越的控制算法设计,飞行的操控因而变得非常简单。
SLA-4800拥有优秀的安全设计,任何时候只要停止遥控器操作,飞行器就会自动悬停在空中,并且具有完善的自动返航功能。
仪器特点:
载有视频实时回传系统的SLA-4800多轴飞行系统能够安全地从空中拍摄和监视受灾地区情况,帮助您调查取证,掌握现场状况帮助您做出正确的指挥决策,同时,低空悬停的飞行器可以对受灾严重地区详细拍摄。
拥有Waypoint自动飞行系统的SLA-4800多轴飞行器可以在任何环境下快速起飞,对需要搜索的危险地区进行细致的往复的低空拍摄,可以提高野外搜索的效率和安全性。
搭载上低照度或红外摄像机之后,即使是昏暗的黄昏和漆黑的夜晚也无法中断您的搜索工作。
搭载了高分辨率数码相机的SLA-4800多轴无人机系统可以从几米到几百米的高度俯拍犯罪现场,您不会漏掉任何细节,找出各种线索之间的相互关系,还
可以快速还原犯罪现场环境以便调查人员进行分析。
拥有高度便携性设计的SLA-4800多轴无人机系统可以在2分钟之内展开,进入危险的交火区域上空拍摄高分辨率的照片或将现场视频回传到您的现场指挥中心,知己知彼,百战不殆。
仪器技术参数:。
微型380电机小马达参数表
(实用版)
目录
1.微型 380 电机概述
2.微型 380 电机参数表内容
3.参数表详解
4.应用领域
5.结论
正文
一、微型 380 电机概述
微型 380 电机,又称为小马达,是一种体积小、效率高、功率强的电机。
它的出现,为各种微型设备和仪器提供了强大的动力支持,极大地推动了科技的发展。
二、微型 380 电机参数表内容
微型 380 电机参数表详细记录了电机的各种性能参数,包括但不限于:
1.电压:电机的工作电压,单位为伏特(V)。
2.功率:电机的输出功率,单位为瓦特(W)。
3.转速:电机每分钟转动的圈数,单位为转每分钟(rpm)。
4.力矩:电机输出的力矩,单位为牛顿米(N·m)。
5.工作温度:电机正常工作的环境温度,单位为摄氏度(℃)。
三、参数表详解
1.电压:这是选择和使用微型电机时需要首先考虑的参数,不同的电
压对应的电机型号和功率会有所不同。
2.功率:这是电机驱动设备的能力,也是电机选型的重要依据。
3.转速:这是电机转动的速度,影响着电机的效率和设备的运行速度。
4.力矩:这是电机输出的动力,影响着电机驱动设备的能力。
5.工作温度:这是电机正常工作的环境温度,超过这个温度可能会影响电机的使用寿命和性能。
四、应用领域
微型 380 电机广泛应用于各种微型设备和仪器中,如无人机、机器人、智能家居、医疗设备等,为我国的科技发展做出了重要贡献。
五、结论
微型 380 电机参数表详实地记录了电机的各种性能参数,这些参数是选择和使用微型电机的重要依据。

无人机价格参考公司名称:大疆网址:/cn/support产品分类:一、多轴四旋翼Inspire 1悟单控的17999元飞行器型号T600重量(含电池)2935 克最大起飞重量3400 克悬停精度(可安全飞行状态)垂直:0.5 米水平:2.5 米最大旋转角速度俯仰轴:300°/秒航向轴:150°/秒最大俯仰角度35°最大上升速度5 米/秒最大下降速度4 米/秒最大水平飞行速度22 米/秒(A TTI 模式下,海平面附近无风环境) 最大飞行海拔高度4500 米最大可承受风速10 米/秒飞行时间约18 分钟动力电机型号DJI 3510螺旋桨型号DJI 1345室内定位悬停标配工作环境温度-10°至40° C轴距559 至581 毫米最大外形尺寸438 x 451 x 301 毫米功率谱密度9.06mW/MHz云台型号ZENMUSE X3功耗(含相机)静态:9 W动态:11 W角度抖动量±0.03°云台安装方式可拆式可控转动范围俯仰:-90°至+30°水平:±320°结构设计范围俯仰:-125°至+45°水平:±330°最大控制转速俯仰:120°/秒水平:180°/秒相机名称X3型号FC350总像素1276 万像素有效像素1240 万像素照片最大分辨率4000×3000ISO 范围100-3200 (视频)100-1600 (照片)电子快门速度8 秒-1/8000 秒录影FOV94°传感器SONY EXMOR 1/2.3”镜头20mm (35mm 格式等效)f/2.8;对焦点无穷远9 组9 片(含2 片非球面透镜)蓝玻璃滤光片照片拍摄模式单张拍摄多张连拍(BURST:3/5/7 张、自动包围曝光(AEB):3/5 张@0.7 EV 步长定时拍摄录像分辨率UHD:4096x2160p24/25、3840x2160p24/25/30 FHD:1920x1080p24/25/30/48/50/60HD:1280x720p24/25/30/48/50/60视频存储最大码流60 Mbps支持文件存储格式文件系统:FAT32/exFAT图片格式:JPEG、DNG视频格式:MP4/MOV (MPEG-4 A VC/H.264)支持存储卡类型Micro SD 卡最大支持64GB 容量,传输速度为Class 10 及以上或达到UHS-1 评级的MicroSD 卡工作环境温度0°至40° C遥控器名称C1工作频率922.7 至927.7 MHz (日本版)5.725 至5.825 GHz (非日本版)2.400 至2.483 GHz信号有效距离(开阔室外无干扰)2 千米等效全向辐射功率(EIRP)10dBm@900M********************视频输出接口USB、mini-HDMI供电方式内置锂电充电方式使用DJI 指定充电器协同功能支持多机互连平板设备支架标配平板设备最大宽度170mm工作功耗9 W工作环境温度-10°至40° C存放环境温度存放时间小于3 个月:-20°至45° C存放时间大于3 个月:22°至28° C充电环境温度0°至40° C电池6000 mAh LiPo 2S充电器型号A14-100P1A电压26.3 V额定功率100 W标配电池名称Intelligent Flight Battery型号TB47容量4500 mAh电压22.2 V电池类型LiPo 6S能量99.9 Wh电池整体重量570g工作环境温度-10°至40° C存放环境温度存放时间小于3 个月:-20°至45° C存放时间大于3 个月:22°至28° C充电环境温度0°至40° C最大充电功率180 W选配电池名称Intelligent Flight Battery型号TB48容量5700 mAh电压22.8 V电池类型LiPo 6S能量129.96 Wh电池整体重量670 克工作环境温度-10°至40° C存放环境温度存放时间小于3 个月:-20°至45° C存放时间大于3 个月:22°至28° C充电环境温度0°至40° C最大充电功率180 W视觉定位系统速度测量范围飞行速度小于8 米/秒(高度 2 米,光照充足)高度测量范围5 至500 厘米使用环境地面有丰富纹理,光照条件充足(>15 lux,室内日光灯正常照射环境)精确悬停范围0 至250厘米DJI GO App 移动设备系统版本要求iOS 8.0 或更高版本,Android 4.1.2 或更高版本支持的移动设备*与iPhone 5s、iPhone 6、iPhone 6 Plus、iPad Air、iPad Air Wi-Fi + Cellular、iPad mini 2、iPad mini 2 Wi-Fi + Cellular、iPad Air 2、iPad Air 2 Wi-Fi + Cellular、iPad mini 3和iPad mini 3 Wi-Fi + Cellular 兼容。
捕食者无人机概述张进摘要:无人机具有造价低、使用经济性、实效性较强、出勤率较高的特点,可对目标实施连续不断的跟踪侦察,使战场透明度、侦察实时性大大提高。
特别是无人攻击机在现代战争中的应用,军用无人机发展至今已经达到了在实战中代替飞行员驾驶战斗机实施作战任务、进行空中格斗的效果。
在无人机的发展过程中,美国是全球无人机领域的领航者,其空军配备的“捕食者”无人机及其配套体系更是美国无人机技术发展到一定程度的产物,具有极强的代表性。
关键词:无人机;捕食者无人机;监视系统;工作原理一、概述无人机最早起源于军用靶机,经过数十年的发展,军用无人机的型谱已从靶机逐步扩展到预警、侦察、探测、通信、诱饵、战斗等多个方面。
美国在越南战争中使用无人机执行侦察任务,开启了无人机在战场应用的先河。
此后,在海湾战争、科索沃战争、伊拉克战争等现代战争中,无人机得到越来越广泛的应用,战略和战术地位迅速提升,发挥着越来越大的作用。
捕食者无人机是一种飞行续航时间长的多用无人机,主要用于侦察、监视、目标指定、电子战和实弹攻击。
该型无人机于1984年开始研制,1999年进入服役。
捕食者(Predator)是该无人机的名称,其代号RQ-1为侦察型,MQ-1为多用型。
捕食者无人机目前主要有两个型号,即捕食者-A和捕食者-B。
捕食者无人机的战术技术数据捕食者-A 捕食者-B 机长8.75m 10.36m翼展14.85m 19.52m二、结构组成(一)机体结构机 体 高2.21m 尾 翼 展4.38m 飞 行 速 度204km/h 370km/h 待 机 速 度111~130lm/h 278km/h 续 航 时 间24h 25h 最大续航时间40h 升 限7926m 13725m 推 进一台78.3kW 的Rotax914型4缸4冲程发动机 一台559kW 杭尼韦尔公司的TPE-331-10T 涡轮螺桨发动机 负 荷 205kg(光-电/红外或合成孔径雷达) 317.5kg(光-电/红外和合成孔径雷达)起 飞 质 量 1023kg2721kg采用细长近似圆柱形的机身,头部为半球形,机身中部有一对展弦比很大的梯形下单机翼,采用低雷诺数翼型使其具有优越的气动性能,机翼控制面包括后缘外侧副翼和后缘2/3翼展内侧襟翼,机翼下面有武器挂架。
无人机,也称无人飞行器,英文Unmannedaerial vehicle(UAV)无人飞行器是一种配置了数据处理系统、传感器、自动控制系统和通讯系统等必要机载设备的飞行器。
无人机技术是一项设计多个技术领域的综合系统,它对通讯技术、传感器技术、人工智能技术、图像处理技术模式识别技术、现代控制理论都有较深的运用和较高的要求。
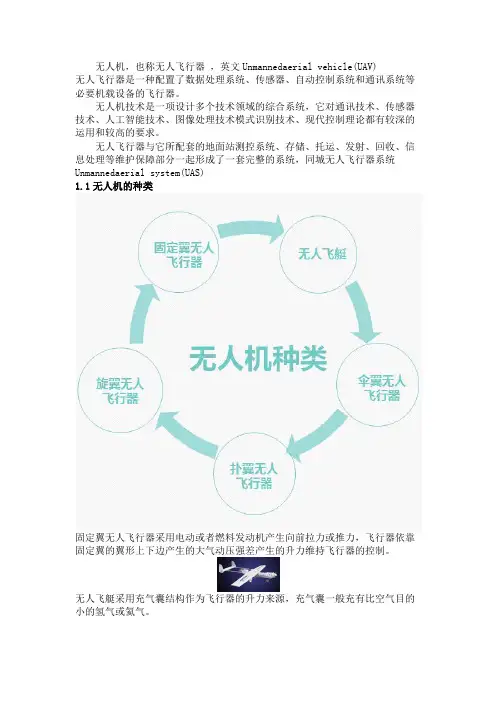
无人飞行器与它所配套的地面站测控系统、存储、托运、发射、回收、信息处理等维护保障部分一起形成了一套完整的系统,同城无人飞行器系统Unmannedaerial system(UAS)1.1无人机的种类固定翼无人飞行器采用电动或者燃料发动机产生向前拉力或推力,飞行器依靠固定翼的翼形上下边产生的大气动压强差产生的升力维持飞行器的控制。
无人飞艇采用充气囊结构作为飞行器的升力来源,充气囊一般充有比空气目的小的氢气或氦气。
旋翼无人飞行器,其配备有多个朝正上方安装的螺旋桨,由螺旋桨的动力系统产生向下的气流,并对飞行器产生升力。
扑翼无人飞行器是基于仿生学原理,配合活动机翼能否模拟飞鸟的翅膀上下扑动的动作而产生升力和向前的推力。
伞翼无人飞行器采用伞型机翼作为飞行器升力的主要来源。
1.2无人机的分类与管理在中国无人机驾驶航空器体系中,按照无人机的基本起飞重量指标可以分为四个等级1. 微型无人机,空机质量小于等于7千克2. 轻型无人机,空机质量大于7千克,但小于等于116千克,并且全马力飞行中,矫正空速度100公里/小时,升限小鱼3000米3. 小型无人机,空机质量小于等于5700千克,除微型及小型无人机以外的其他无人机4. 大型无人机,空机质量大于5700千克的无人机中国的空域目前归属于军队管理,民用航空领域则由民航总局向军队申请划分空域及航道。
民航总局针对私人飞行器的管理专设“中国航空器拥有者及驾驶员协会AircraftOwners and Pilots Association Of China - AOPA”,中国民航领域对飞行器主要管理分为三个层次等级进行管理。
本文向各位无人机航模爱好者介绍下电机的种类(有刷电机和无刷电机)、转速调节器(简称电调)。
电动飞机的动力,主要是指2个元件:第一就是电机(Motor),也称马达,第二是电调。
电调的作用是控制电机转速的调速器(Speed Controller),很久之前早期的调速器是使用舵机控制可调电阻拨片来实现,此类称为机械调速器,现已退出历史舞台,仅能在一些复刻车架包装盒或者说明书上看到其照片。
现在我们说调速器,都是指电子调速器,简称电调,英文Electronic Speed Controller,缩写ESC按大类来分,可分为有刷动力和无刷动力。
即有刷电调搭配有刷电机,以及无刷电调搭配无刷电机。
有刷电机与无刷电机车模用的电机,全部都是内转子电机,也就是电机外壳是固定的,靠里面圆形转子转动。
外转子的这里不予讨论,想要了解外转子与内转子的,可以自行百度了解。
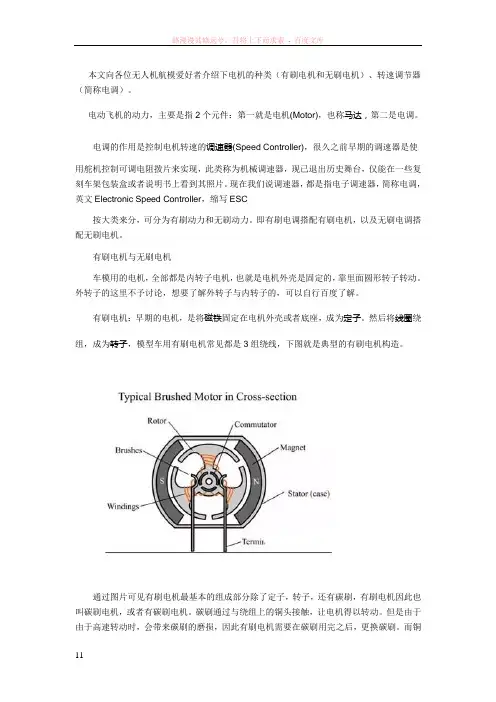
有刷电机:早期的电机,是将磁铁固定在电机外壳或者底座,成为定子。
然后将线圈绕组,成为转子,模型车用有刷电机常见都是3组绕线,下图就是典型的有刷电机构造。
通过图片可见有刷电机最基本的组成部分除了定子,转子,还有碳刷,有刷电机因此也叫碳刷电机,或者有碳刷电机。
碳刷通过与绕组上的铜头接触,让电机得以转动。
但是由于由于高速转动时,会带来碳刷的磨损,因此有刷电机需要在碳刷用完之后,更换碳刷。
而铜头也会磨损,因此在有碳刷时代的竞赛电机,除了更换碳刷,还需要打磨铜头,让铜头保持光滑。
更换碳刷后还需要磨合,让碳刷与铜头的接触面积最大化,以实现最大电流来提高电机的转速/扭矩。
无刷电机:既然有刷有以上的弊端,于是无刷便应运而生。
无刷是把线圈绕在定子上,然后把磁铁做成转子,转动的是磁铁,而不是线圈,因此就没有了碳刷这个消耗品。
既然线圈固定了,那么如何让线圈产生变化的磁场呢?这就是为什么无刷需要3根线的原因了。
利用无刷电调,给线圈组对应地供电以产生相应的磁场,就可以实现不停地驱动磁铁转子保持转动。
本文向各位无人机航模爱好者介绍下电机的种类(有刷电机和无刷电机)、转速调节器(简称电调)。
电动飞机的动力,主要是指2个元件:第一就是电机(Motor),也称马达,第二是电调。
电调的作用是控制电机转速的调速器(Speed Controller),很久之前早期的调速器是使用舵机控制可调电阻拨片来实现,此类称为机械调速器,现已退出历史舞台,仅能在一些复刻车架包装盒或者说明书上看到其照片。
现在我们说调速器,都是指电子调速器,简称电调,英文Electronic Speed Controller,缩写ESC按大类来分,可分为有刷动力和无刷动力。
即有刷电调搭配有刷电机,以及无刷电调搭配无刷电机。
有刷电机与无刷电机车模用的电机,全部都是内转子电机,也就是电机外壳是固定的,靠里面圆形转子转动。
外转子的这里不予讨论,想要了解外转子与内转子的,可以自行百度了解。
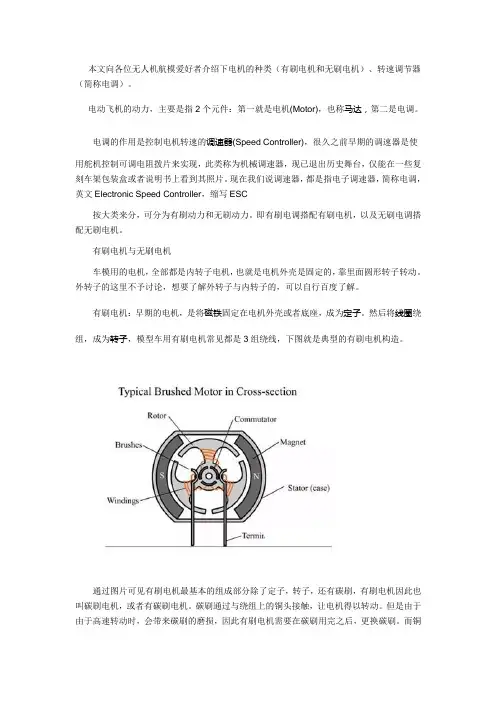
有刷电机:早期的电机,是将磁铁固定在电机外壳或者底座,成为定子。
然后将线圈绕组,成为转子,模型车用有刷电机常见都是3组绕线,下图就是典型的有刷电机构造。
通过图片可见有刷电机最基本的组成部分除了定子,转子,还有碳刷,有刷电机因此也叫碳刷电机,或者有碳刷电机。
碳刷通过与绕组上的铜头接触,让电机得以转动。
但是由于由于高速转动时,会带来碳刷的磨损,因此有刷电机需要在碳刷用完之后,更换碳刷。
而铜头也会磨损,因此在有碳刷时代的竞赛电机,除了更换碳刷,还需要打磨铜头,让铜头保持光滑。
更换碳刷后还需要磨合,让碳刷与铜头的接触面积最大化,以实现最大电流来提高电机的转速/扭矩。
无刷电机:既然有刷有以上的弊端,于是无刷便应运而生。
无刷是把线圈绕在定子上,然后把磁铁做成转子,转动的是磁铁,而不是线圈,因此就没有了碳刷这个消耗品。
既然线圈固定了,那么如何让线圈产生变化的磁场呢?这就是为什么无刷需要3根线的原因了。
利用无刷电调,给线圈组对应地供电以产生相应的磁场,就可以实现不停地驱动磁铁转子保持转动。
一.怎么挑选电机,基本参数怎么看电机KV值:电机的转速(空载)=KV值X电压;例如KV1000的电机在10V电压下它的转速(空载)就是 10000转/分钟。
23.KV值?答:指加一伏电压,电机转速增加多少,KV2000即指电压在10伏的时候,电机每分钟空转转速是 20000转。
这个参数的意义是:能够帮助你判断这个马达的特性, KV高马达就暴力,内阻小,电流大,功率高,转速快或者说相同电压下爆发出来的功率高拥有很好的极限转速,但是受到电机自身的设计与材料限制,会有一个功率上限,一般说KV高的配小的高速桨,KV低的配大的低速桨,这个与开车有点类似,车感觉劲道最足的时候往往转速比较低。
21..电动机的品牌?答:常用的有,朗宇、新西达、亚拓、蝎子、浩马特、花牌、银燕;一般固定翼用朗宇较多,新西达(便宜)次之,直升机用亚拓、蝎子(太贵)次之22.电机的型号?答:电机型号,每个厂家都有自己的编号规则,主要有KV值,电机编码。
以朗宇电机,常规如无刷电机的型号 2212 2217 220822指电机直径12 17 08 指电机机身长度体积 2216 22122216动力就强于2212,具体数值可参考朗宇官方数据2212表示线圈外径22毫米,长度12毫米二.关于航模中电机+电池+桨的动力选择针对电机+电池+桨的推力综合如下:1.2208 36g/27.8×23mm,2212 48g/27.8x27mm,重量只相差8g;2.同一系列的电机,高KV+电池/桨的推力》低KV+电池/桨的推力3.不同系列电机,2208高KV+2S+桨1 ~=~ 2212低KV+3s+桨2;此时,因3S电池重于2S,导致2212方案重量大于2208方案;4.电池的重量2S与3S的相差极大(使用某型号做参考)1) 2S 20C 850mAh 45g2) 3s 20C 1300mAh 111g3) 3s 20C 2200mAh 175g4) 3s 20C 2800mAh 206g5) 2s 20C 1300mAh 85g (几乎是850mAh的一倍重量)6)2s 20C 1800mAh 128g5.飘飘机通常的机身空重在200g以内,单上翼300g以内(不含电机、电池,TDF6接收机5g左右、舵机9g*4=36g,电调20g以内)6.航模来说,推比和翼载很重要。
无刷电机参数1 什么是无刷电机?无刷电机是指电子式交流电机(BLDC)或永磁同步电机(PMSM),它们没有碳刷和电刷。
因为没有触点,这种电机不会产生磨损或摩擦,因此寿命更长,效率更高,噪音更小。
2 无刷电机参数(1)型号:不同的无刷电机模型有不同的参数,包括功率、转速、电压、电流等。
常见的无刷电机型号有2212、2204、1806等。
(2) KV 值:这是无刷电机的一个重要参数,表示一个无负载的无刷电机每分钟旋转的圈数。
例如,KV 值为1000的无刷电机在12V电压下每分钟旋转1000圈。
(3)最大电流:这是无刷电机能够承受的最大电流值,通常以安培为单位(A),同时也会影响电机的发热情况。
(4)电压范围:这是无刷电机能够承受的最大电压和最小电压,这也决定了电机的工作范围。
(5)负载能力:这是无刷电机能够承受的最大推力,这通常由无刷电机的大小、型号等因素决定。
3 无刷电机优点(1)高效:无刷电机没有电刷,也没有磨擦和损耗,因此效率更高。
(2)低噪音:没有电刷和滑动接触,噪音更小。
(3)长寿命:由于无刷电机没有磨损部件,因此寿命更长。
(4)可控性高:无刷电机可以更好地控制,因为它们可以更快地响应扭矩的变化。
(5)更多的应用空间:由于它们的高效率和低噪音,无刷电机被广泛应用于无人机、玩具车、模型飞机、摄像机云台等领域。
4 总结无刷电机是一种先进的电机类型,由于其高效率、低噪音、长寿命等特点,在许多应用领域广泛应用。
无刷电机的参数包括型号、KV 值、最大电流、电压范围和负载能力等,这些参数对无刷电机的性能和使用有重要影响。
无人机云台是无人机用于安装、固定摄像机等任务载荷的支撑设备。
云台就是两个交流电机组成的安装平台,可水平和垂直的运动。
但要注意区别于照相器材中的云台概念。
照相器材的云台一般来说只是一个三脚架,只能通过手来调节方位;而监控系统所说云台是通过控制系统在远程可控制其转动及移动的方向。
云台转动速度衡量云台档次高低重要指标。
云台水平和垂直方向是由两个不同的电机驱动的,因此云台的转动速度也分为水平转速和垂直转速。
无人机云台电机是一种应用在无人机飞行器拍摄旋转云台上的驱动电机,具有传动、减速、输出转速功能的齿轮电机,主要传动结构由驱动电机、齿轮箱集成制造组装而成,驱动电机可采用直流无刷电机、直流有刷电机、步进电机、空心杯电机,齿轮箱可采用行星齿轮箱、圆柱齿轮箱、平行齿轮箱、蜗轮蜗杆齿轮箱。
可按照需求定制技术参数,定制参数范围规格在3.4mm-38mm,电压:3V-24V,功率:0.01-40W,输出转速:5-2000rpm,减速比:5-1500,输出扭矩:1gf.cm-50Kgf.cm;产品名称:12MM减速齿轮箱产品分类:塑胶行星齿轮箱外径:12mm材质:塑料旋转方向:cw&ccw齿轮箱回程差:≤3°轴承:烧结轴承;滚动轴承轴向窜动:≤0.3mm(烧结轴承);≤0.2mm(滚动轴承)输出轴径向负载:≤5N(烧结轴承);≤10N(滚动轴承)工作温度:-20 (85)无人机云台电机规格、参数范围:尺寸规格系列:3.4mm、4mm、6mm、8mm、10mm、12mm、16mm、18mm、20mm、22mm、24mm、28mm、32mm、38mm;材质系列:塑胶行星齿轮箱、金属行星齿轮箱输出力矩范围:1gf-cm至50kg-cm;减速比范围:5-1500;输出转速范围:5-2000rpm;产品名称:智能电动云台齿轮箱项目背景:智能自动云台与摄像机配合使用能达到扩大监视范围的作用,提了摄像机的使用价值,是用于安装摄像机,它在控制电压(云台控制器输出的电压)的作用下,做水平和垂直转动,使摄像机能在大范围内对准并摄取所需要的观察目标。
一、无人机简介1、常见无人机有:多旋翼、固定翼、直升机。
2、连线方式:3、多旋翼成品图:二、电机1、无刷电机无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。
2、优点1) 无电刷、低干扰2) 噪音低、运转顺畅3) 寿命长、低维护成本3、原理无刷直流电动机是采用半导体开关器件来实现电子换向的,即用电子开关器件代替传统的接触式换向器和电刷。
它具有可靠性高、无换向火花、机械噪声低等优点,广泛应用于高档录音座、录像机、电子仪器及自动化办公设备中。
2、电机的型号含义?2212电机,2018电机等等,不管什么牌子的电机,具体都要对应4位这类数字,其中前面2位是电机转子的直径,后面2位是电机转子的高度。
注意,不是外壳哦。
简单来说,前面2位越大,电机越肥,后面2位越大,电机越高。
又高又大的电机,功率就更大,适合做大四轴。
通常2212电机是最常见的配置。
4、什么是电机KV值?每个无刷电机都会标准多少kv值,这个kv是外加1v电压对应的每分钟空转转速,例如:1000kv电机,外加1v电压,电机空转时每分钟转1000转,外加2v电压,电机空转就2000转。
三、电子调速器1、电子调速器电子调速器是一个控制发电机转速的控制装置。
它是根据接受的电信号,通过控制器和执行器来改变喷油泵供油量的大小。
2、为什么需要电调?电调的作用就是将飞控板的控制信号,转变为电流的大小,以控制电机的转速。
因为电机的电流是很大的,通常每个电机正常工作时,平均有3a左右的电流,如果没有电调的存在,飞控板根本无法承受这样大的电流(另外也没驱动无刷电机的功能)。
同时电调在四轴当中还充当了电压变化器的作用,将11.1v的电压变为5v为飞控板和遥控器供电。
3、买多大的电调?电调都会标上多少A,如20a,40a 这个数字就是电调能够提供的电流。
大电流的电调可以兼容用在小电流的地方。
小电流电调不能超标使用。
4、电调编程什么意思?首先要说明电调是有很多功能模式的,选择这个功能就是对电调编程。
锂电池的主要参数有哪些?1.电池容量电池的容量取决于电池中活性物质的数量,通常以毫安时(mAh)或安时(Ah)表示。
例如,1000毫安在1A电流放电1小时可转换为大约3600C的电荷。
2.标称电压电池正负极之间的电位差称为电池的标称电压。
标称电压由极片材料的电极电位和内部电解质的浓度决定。
锂电池放电电位为抛物线,4.3V~3.7V和3.7V~3.0V,变化迅速。
只有3.7V左右的放电时间最长,几乎占3≤4,因此锂电池的标称电压是指维持放电时间最长的电压。
锂电池标称电压分别为3.7V和3.8V,充电终止电压3.7V的电池为4.2V,无人机航模电池参数小谈无人机小讲堂发布时间:04-1122:24酷点电池无人机电池大多数是聚合物锂电池能量密度大,重量轻,放电电流大的特性,深受无人机和航模玩家的喜爱。
锂电池我们平时也都有接触,那么无人机的电池和我们手机用的锂电池最大区别在哪呢?其实两种电池的主要化学成分是差不多的。
但是无人机使用的电池需要内阻小、重量轻、能够快充快放。
下面奉上一张酷点电池的基本参数表,我们以参数表为例来简单说明电池的参数酷点3S 2200mah电池电芯组合方式-3s1P:3S代表三个电池串联,1P代表每个串联的只有一片电芯。
3S1P 2200mah:由3片容量为2200mah的电芯串联,这样就可以将电压升高,而容量不变。
电压-11.1V:电池的总电压是11.1V。
这个可能很多人会有疑惑,但是这是电池通用的一个表示方法,一般我们说锂电池单节的电压是3.7V,所以3.7V*3(电芯数量)=11.1V2200mah:可以以2200ma(2.2A)的电流放电,持续放电1小时。
(H为小时的单位)持续放电倍率:比如说其中的一个25C,那么也就是说可以以25倍容量的倍率持续放电。
图中2200mah*25倍=55A。
也就是说可以以55A的电流持续输出。
峰值放电倍率:这个就是说最高的放电倍率,一般以这个倍率放电只能持续在10秒内。
四旋翼无人机电机推力计算一、引言随着无人机技术的发展,四旋翼无人机因其稳定性和操控性受到了广泛关注。
在无人机设计中,电机推力的计算是一项重要任务。
本文将详细介绍四旋翼无人机电机推力的计算方法以及在实际应用中的重要性。
二、四旋翼无人机电机推力计算公式1.基本公式电机推力F与电机功率P、转速n和螺旋桨的拉力T之间的关系可以用以下公式表示:F = P / (2πn * T)其中,P为电机功率(单位:瓦特),n为电机转速(单位:转/分钟),T 为螺旋桨拉力(单位:牛顿)。
2.修正公式实际应用中,还需要考虑空气密度、飞行速度等因素。
修正后的公式为:F = P / (2πn * T * ρ * A / V)其中,ρ为空气密度(单位:千克/立方米),A为螺旋桨面积(单位:平方米),V为飞行速度(单位:米/秒)。
3.实例计算假设一台四旋翼无人机,电机功率为500W,转速为20000转/分钟,螺旋桨拉力为2N,空气密度为1.2千克/立方米,飞行速度为10米/秒,螺旋桨面积为0.05平方米。
代入公式,得到:F = 500 / (2π * 20000 * 2 * 1.2 * 0.05 / 10) ≈ 1.67N三、影响电机推力的因素1.电机参数:包括电机的功率、转速等,直接影响推力大小。
2.旋翼参数:如旋翼的拉力、面积等,与电机推力成正比。
3.空气密度:影响无人机所受的升力,从而影响电机推力。
4.飞行速度:飞行速度越快,所需的电机推力越大。
四、电机推力计算在无人机设计中的应用在无人机设计中,电机推力的计算有助于选择合适的电机和旋翼,确保无人机具有良好的飞行性能。
同时,根据实际飞行需求,可以调整电机参数、旋翼参数等,以达到最佳飞行效果。
五、结论四旋翼无人机电机推力的计算对于无人机设计具有重要意义。
通过掌握计算方法和影响因素,可以更好地选择和使用无人机电机,提高无人机性能。