产生方波程序
- 格式:doc
- 大小:29.00 KB
- 文档页数:3
用单片机产生频率可调的方波信号。
输出方波的频率范围为1Hz-200Hz,频率误差比小于0.5%。
要求用“增加”、“减小”2个按钮改变方波给定频率,按钮每按下一次,给定频率改变的步进步长为1Hz,当按钮持续按下的时间超过2秒后,给定频率以10 次/秒的速度连续增加(减少),输出方波的频率要求在数码管上显示。
用输出方波控制一个发光二极管的显示,用示波器观察方波波形。
开机默认输出频率为5Hz。
3.5.1模块1:系统设计(1)分析任务要求,写出系统整体设计思路任务分析:方波信号的产生实质上就是在定时器溢出中断次数达到规定次数时,将输出I/O管脚的状态取反。
由于频率范围最高为200Hz,即每个周期为5ms(占空比1:1,即高电平2.5ms,低电平2.5 ms),因此,定时器可以工作在8位自动装载的工作模式。
涉及以下几个方面的问题:按键的扫描、功能键的处理、计时功能以及数码管动态扫描显示等。
问题的难点在按键连续按下超过2S的计时问题,如何实现计时功能。
系统的整体思路:主程序在初始化变量和寄存器之后,扫描按键,根据按键的情况执行相应的功能,然后在数码显示频率的值,显示完成后再回到按键扫描,如此反复执行。
中断程序负责方波的产生、按键连续按下超过2S后频率值以10Hz/s递增(递减)。
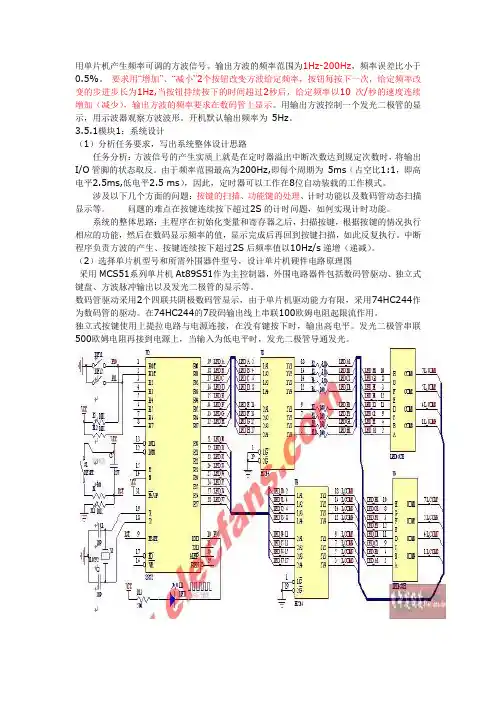
(2)选择单片机型号和所需外围器件型号,设计单片机硬件电路原理图采用MCS51系列单片机At89S51作为主控制器,外围电路器件包括数码管驱动、独立式键盘、方波脉冲输出以及发光二极管的显示等。
数码管驱动采用2个四联共阴极数码管显示,由于单片机驱动能力有限,采用74HC244作为数码管的驱动。
在74HC244的7段码输出线上串联100欧姆电阻起限流作用。
独立式按键使用上提拉电路与电源连接,在没有键按下时,输出高电平。
发光二极管串联500欧姆电阻再接到电源上,当输入为低电平时,发光二极管导通发光。
图3-14 方波信号发生器的硬件电路原理图(3)分析软件任务要求,写出程序设计思路,分配单片机内部资源,画出程序流程图软件任务要求包括按键扫描、定时器的控制、按键连续按下的判断和计时、数码管的动态显示。
毕业论文(设计)
题目
学院学院
专业
学生姓名
学号年级级指导教师
教务处制表
matlab产生方波脉冲和周期性方波信号
一、程序说明
本团队长期从事matlab编程与仿真工作,擅长各类毕业设计、数据处理、图表绘制、理论分析等,程序代做、数据分析
具体信息联系
二、程序示例
周期性矩形波(方波)信号:在MATLAB中用square函数来表示,其调用形式为
y=square(t,DUTY)
其作用类似于sin(t),用以产生一个时长为t、幅值为±1的周期性方波信号,其中的DUTY参数表示占空比,即在信号的一个周期中正值所占的百分比。
例如频率为30Hz的周期性方波信号的 MATLAB 参考程序如下:t=-2*pi/100:pi/1024:2*pi/100;
y=square(2*pi*30*t,50);
plot(t,y);
grid
ylim([-1.5 1.5])
矩形脉冲信号:在MATLAB中用rectpuls函数来表示,其调用形式为
y=rectpuls(t,width)
用以产生一个幅值为1,宽度为width,相对于t=0点左右对称的矩形波信号,该函数的横坐标范围由向量t决定,是以t=0为中心向左右各展开width/2的范围,width的默认值为1。
例:画宽为2的矩形脉冲信号的MATLAB源程序如下:
width=2;
t=-2:0.001:3;
ft=rectpuls(t,width); plot(t,ft);
grid on;
ylim([-0.5 1.5])。
显示频率,幅度可调,可产生四种波形,正弦波,方波,锯齿波,三角波,希望你能喜欢,给你发了一张效果图,喜欢的话别忘了采纳我的回答啊#include<>#define uchar unsigned char#define uint unsigned int#define DAdata P0 //DA数据端口sbit DA_S1= P2^0; // 控制DAC0832的8位输入寄存器,仅当都为0时,可以输出数据(处于直通状态),否则,输出将被锁存sbit DA_S2= P2^1; // 控制DAC0832的8位DAC寄存器,仅当都为0时,可以输出数据(处于直通状态),否则,输出将被锁存sbit key= P3^2;uchar wavecount; //'抽点'计数uchar THtemp,TLtemp;//传递频率的中间变量uchar judge=1; //在方波输出函数中用于简单判别作用uchar waveform; //当其为0、1、2时,分别代表三种波uchar code freq_unit[3]={10,50,200}; //三种波的频率单位uchar idata wavefreq[3]={1,1,1}; //给每种波定义一个数组单元,用于存放单位频率的个数uchar code lcd_hang1[]={"Sine Wave " "Triangle Wave " "Square Wave " "Select Wave: " "press key! "};uchar idata lcd_hang2[16]={"f= Hz "};uchar code waveTH[]={0xfd,0xfe,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xfd,0xfe,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xec,0xf6,0xf9,0xfb,0xfc,0xfc,0xfd,0xfd,0xfd,0xfe};uchar code waveTL[]={0x06,0x8a,0x10,0x4e,0x78,0x93,0xa8,0xb3,0xbe,0xc6, //正弦波频率调整中间值0xac,0xde,0x48,0x7a,0x99,0xaf,0xbb,0xc8,0xd0,0xde, //三角波频率调整中间值0x88,0x50,0x90,0x32,0x34,0xbe,0x4a,0xa3,0xe5,0x2c};/******************************************************************** *****************************/uchar code triangle_tab[]={ //每隔数字8,采取一次0x00,0x08,0x10,0x18,0x20,0x28,0x30,0x38,0x40,0x48,0x50,0x58,0x60,0x68 ,0x70,0x78,0x80,0x88,0x90,0x98,0xa0,0xa8,0xb0,0xb8,0xc0,0xc8,0xd0,0xd8,0xe0,0xe8, 0xf0,0xf8,0xff,0xf8,0xf0,0xe8,0xe0,0xd8,0xd0,0xc8,0xc0,0xb8,0xb0,0xa8,0xa0,0x98,0x90,0 x88,0x80,0x78,0x70,0x68,0x60,0x58,0x50,0x48,0x40,0x38,0x30,0x28,0x20,0x18,0x10 ,0x08,0x00};uchar code sine_tab[256]={//输出电压从0到最大值(正弦波1/4部分)0x80,0x83,0x86,0x89,0x8d,0x90,0x93,0x96,0x99,0x9c,0x9f,0xa2,0xa5,0xa8, 0xab,0xae,0xb1,0xb4,0xb7,0xba,0xbc,0xbf,0xc2,0xc5,0xc7,0xca,0xcc,0xcf,0xd1,0xd4,0xd6,0xd8,0xda,0xdd,0xdf,0x e1,0xe3,0xe5,0xe7,0xe9,0xea,0xec,0xee,0xef,0xf1,0xf2,0xf4,0xf5,0xf6,0xf7,0xf8,0xf9,0xfa,0xfb,0xfc,0xfd,0xfd,0 xfe,0xff,0xff,0xff,0xff,0xff,0xff,//输出电压从最大值到0(正弦波1/4部分)0xff,0xff,0xff,0xff,0xff,0xff,0xfe,0xfd,0xfd,0xfc,0xfb,0xfa,0xf9,0xf8,0xf7,0xf6, 0xf5,0xf4,0xf2,0xf1,0xef,0xee,0xec,0xea,0xe9,0xe7,0xe5,0xe3,0xe1,0xde,0xdd,0xda,0xd8,0xd6,0xd4, 0xd1,0xcf,0xcc,0xca,0xc7,0xc5,0xc2,0xbf,0xbc,0xba,0xb7,0xb4,0xb1,0xae,0xab,0xa8,0xa5,0xa2,0x9f,0x9c,0x99 , 0x96,0x93,0x90,0x8d,0x89,0x86,0x83,0x80,//输出电压从0到最小值(正弦波1/4部分)0x80,0x7c,0x79,0x76,0x72,0x6f,0x6c,0x69,0x66,0x63,0x60,0x5d,0x5a,0x57, 0x55,0x51,0x4e,0x4c,0x48,0x45,0x43,0x40,0x3d,0x3a,0x38,0x35,0x33,0x30,0x2e,0x2b,0x29,0x27,0x25,0x22,0x20 ,0x1e,0x1c,0x1a,0x18,0x16 ,0x15,0x13,0x11,0x10,0x0e,0x0d,0x0b,0x0a,0x09,0x08,0x07,0x06,0x05,0x04,0x03,0x02 ,0x02,0x01,0x00,0x00,0x00,0x00,0x00,0x00,//输出电压从最小值到0(正弦波1/4部分)0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x02 ,0x02,0x03,0x04,0x05,0x06,0x0 7,0x08,0x09,0x0a,0x0b,0x0d,0x0e,0x10,0x11,0x13,0x15 ,0x16,0x18,0x1a,0x1c,0x1e,0x20,0x22,0x25,0x27,0x29,0x2b ,0x2e,0x30,0x33,0x35,0x38,0x3a,0x3d,0x40,0x43,0x45,0x48,0x4c,0x4e,0x51,0x55,0x57,0x5a,0x5d,0x60,0x63,0x66 ,0x69,0x6c,0x6f,0x72,0x76,0x79,0x7c,0x80};void delay(uchar z){uint x,y;for(x=z;x>0;x--)for(y=110;y>0;y--);}void triangle_out() //三角波输出{DAdata=triangle_tab[wavecount++];if(wavecount>64) wavecount=0;DA_S1=0; //打开8位输入寄存器DA_S1=1; //关闭8位输入寄存器void sine_out() //正弦波输出{DAdata=sine_tab[wavecount++];DA_S1=0; //打开8位输入寄存器DA_S1=1; //关闭8位输入寄存器}void square_out() //方波输出{judge=~judge;if(judge==1) DAdata=0xff;else DAdata=0x00;DA_S1=0; //打开8位输入寄存器DA_S1=1; //关闭8位输入寄存器}/************1602液晶的相关函数*************/#define lcd_ports P1sbit rs=P2^2;sbit rw=P2^3;sbit lcden=P2^4;void write_com(uchar com){rs=0; //置零,表示写指令lcden=0;lcd_ports=com;delay(5);lcden=1;delay(5);lcden=0;}void write_date(uchar date){rs=1; //置1,表示写数据(在指令所指的地方写数据)lcden=0;lcd_ports=date;delay(5);lcden=1;delay(5);lcden=0;void disp_lcd(uchar addr,uchar *temp1){uchar num;write_com(addr);delay(1); //延时一会儿for(num=0;num<16;num++){write_date(temp1[num]);//或者这样写write_date(*(temp1+num));delay(1);}}void init_lcd(){//uchar num;lcden=0; //可有可无rw=0; //初始化一定要设置为零,表示写数据write_com(0x38); //使液晶显示点阵,为下面做准备write_com(0x0c); //初始设置write_com(0x06); //初始设置write_com(0x01); //清零write_com(0x80); //使指针指向第一行第一格disp_lcd(0x80,&lcd_hang1[3*16]); //在第一行显示disp_lcd(0xc0,&lcd_hang1[4*16]); //在第二行显示}/********************1602液晶函数声明结束*********************/ void main(){uchar i=0;DA_S2=0; //使DAC寄存器处于直通状态DAdata=0;DA_S1=1; //关闭8位输入寄存器init_lcd();waveform=0;TMOD=0x01; //设置定时器0为16位工作方式IT0=1; //设置外部中断0为下降沿触发ET0=1; //开定时器中断EX0=1;EA=1;while(1){//DAout(0xff); //可输出TTL波形//DAout(0x80);//T_temp=32;}}void timer0() interrupt 1{TH0=THtemp;TL0=TLtemp;if(waveform==0) sine_out();else if(waveform==1) triangle_out();else if(waveform==2) square_out();}void key_int0() interrupt 0{uchar keytemp;uint total_freq; //总频率EA=0; TR0=0; //关总中断与定时器delay(5); //延时够吗if(key==0) //确实有按键按下而引发中断{keytemp=P3&0xf0; //获取P3口高四位的值switch(keytemp){case 0xe0: //选择波形waveform++;if(waveform>2) waveform=0;break;case 0xd0: //频率按规定单位依次增加wavefreq[waveform]++;if(wavefreq[waveform]>10) wavefreq[waveform]=1; // /*这边要用“>10”,因为它比“=11”可靠break;case 0xb0: //频率按规定单位依次衰减wavefreq[waveform]--;if(wavefreq[waveform]<1) wavefreq[waveform]=10; //这边要用“<1”,因为它比“=0”可靠性更高break;case 0x70: //TTL输出DA_S2=1; //使DAC寄存器关闭break;}THtemp=waveTH[waveform*10+(wavefreq[waveform]-1)]; //方括号中选取第几个数后,并把该值赋给T_tempTLtemp=waveTL[waveform*10+(wavefreq[waveform]-1)];total_freq= wavefreq[waveform] * freq_unit[waveform]; //求输出频率(个数*单位)lcd_hang2[5]=total_freq%10+0x30; //在液晶中显示个位,(0x30 在液晶显示中表示数字0)total_freq/=10; lcd_hang2[4]=total_freq%10+0x30; //在液晶中显示时十位total_freq/=10; lcd_hang2[3]=total_freq%10+0x30; //在液晶中显示时百位total_freq/=10; lcd_hang2[2]=total_freq%10+0x30; //在液晶中显示时千位disp_lcd(0x80,&lcd_hang1[waveform*16]); //在第一行显示disp_lcd(0xc0,lcd_hang2); //在第二行显示}wavecount=0; //'抽点'计数清零while(!key);EA=1; TR0=1; //开启总中断与定时器}。
#include<reg52.h>#define uchar unsigned char;#define uint unsigned int;sbit shuzhi=P2^5; //数值加sbit jia100=P2^6; //加100sbit jian100=P2^7; //减100sbit queding=P3^0; //确定按钮sbit led0=P2^0; //数码管位选sbit led1=P2^1;sbit led2=P2^2;sbit led3=P2^3;sbit led4=P2^4;sbit D1=P3^7; //方波输出uint led_js,ms_js,hz,da,js_50us,f_js,ys; double f,fnum;uchar temp,weix;uchar led_data[5],table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};void T1_data() //初始化T1,定时1ms {TH1=(65536-1000)/256;TL1=(65536-1000)%256;}void T0_data() //初始化T0,定时50us{TH0=0xce;TL0=0xce;}void led5(unsigned int da) //取出各位数{led_data[0]=da/10000;led_data[1]=(da%10000)/1000;led_data[2]=(da%1000)/100;led_data[3]=(da%100)/10;led_data[4]=da%10;}void delay(unsigned int ys) //用于消抖的延时子程序{unsigned int i,j;for(i=ys;i>0;i--)for(j=120;j>0;j--);}void main(){hz=1;D1=1;f_js=0;ms_js=0;led_js=0;js_50us=0;weix=4;led0=1;led1=1;led2=1;led3=1;led4=1;TMOD=0x12; //T0工作于方式2,用于频率控制;T1工作于方式1,用于数码管显示T0_data();T1_data();TR0=1;TR1=1;ET0=1;ET1=1; //开定时中断IT0=1;IT1=1;EX0=1;EX1=1; //开外部中断EA=1;while(1){if(ms_js>=10){ms_js=0;led5(hz);}f=(double)hz; //转换成浮点数fnum=10000.0/f; //求出50us溢出数f_js=(int)fnum; //取整if(fnum+0.5>=f_js+1) //四舍五入{f_js=f_js+1;}if(js_50us>=f_js) //半个周期到{js_50us=0;D1=!D1; //对前次结果取反}}}void timer1() interrupt 3 //定时器T1中断服务程序{T1_data();led0=1;led1=1;led2=1;led3=1;led4=1;temp=led_data[led_js];P1=table[temp]; //点亮数码管段switch(led_js) //选择数码管位{case 0:led0=0;break;case 1:led1=0;break;case 2:led2=0;break;case 3:led3=0;break;case 4:led4=0;break;default:break;}led_js++;if(led_js==5)led_js=0;ms_js++;}void timer0() interrupt 1 //定时器T0中断服务程序{js_50us++;}void int0() interrupt 0 //外部中断0中断服务程序{led0=1;led1=1;led2=1;led3=1;led4=1;switch(weix) //点亮已经选择的数码管位{case 0:led0=0;break;case 1:led1=0;break;case 2:led2=0;break;case 3:led3=0;break;case 4:led4=0;break;default:break;}while(1){while(!shuzhi||!queding); //等待按键弹起while(shuzhi&&queding); //等待按键按下delay(100); //延时消抖while(shuzhi&&queding); //再次判断按键是否真的按下if(!shuzhi) //如果数值加按下,{led_data[weix]++; //则相应位加一if(led_data[weix]>9)led_data[weix]=0;}hz=led_data[0]*10000+led_data[1]*1000+led_data[2]*100+ led_data[3]*10+led_data[4];if(hz>10000)hz=0;led5(hz);P1=table[led_data[weix]];if(!queding) //如果确定键按下{js_50us=0;break;} //则退出while(1)循环}weix--; //每中断一次,所调节的数码管位循环向左移一位if(weix<0)weix=4;}void int1() interrupt 2 //外部中断1服务程序{led0=1;led1=1;led2=0;led3=1;led4=1; //关闭除百位以外的其他数码管while(1){while(!jia100||!jian100||!queding); //检测是否按键已经弹起while(jia100&&jian100&&queding); //检测按键是否被按下delay(100); //延时消抖while(jia100&&jian100&&queding); //再次检测按键是否真的被按下if(jia100==0) //如果加100键被按下{hz=hz+100; //则自加100if(hz>10000)hz=10000;}if(jian100==0){if(hz<100)hz=0;elsehz=hz-100;}led5(hz);P1=table[led_data[2]];if(queding==0){js_50us=0;break;}}}。
用单片机进行方波发生器的设计方波发生器是一种产生具有固定频率和振幅的方波信号的电路或设备。
它可以广泛应用于通信、计算机、测量、控制等领域。
在本文中,我们将详细介绍如何使用单片机进行方波发生器的设计。
设计一个单片机方波发生器可以分为以下几个步骤:步骤一:选择单片机型号和开发工具选择一个适合的单片机型号是设计方波发生器的第一步。
目前市场上常见的单片机有MCS-51系列、AVR系列、STM32系列等。
根据需求选择适合的型号。
步骤二:确定方波的频率和振幅方波发生器的设计需要明确所需的方波频率和振幅。
频率指的是方波信号的周期性,单位为赫兹(Hz);振幅指的是方波信号的最大值和最小值之间的差值,单位为伏特(V)。
根据实际需求确定频率和振幅的数值。
步骤三:编写单片机程序在单片机方波发生器的设计中,需要编写相应的程序代码。
在编写代码之前,需要了解所选单片机的编程语言、开发工具和编程接口,以便正确地编写和调试程序。
在编写程序时,需要利用单片机的定时器/计数器功能。
通过配置定时器的工作模式、时钟源和计数值,可以生成一定频率的脉冲信号。
然后利用IO口输出脉冲信号,并通过电路将脉冲信号转换成方波信号。
具体的代码实现细节根据所选单片机型号和开发工具而定,可以参考相关的单片机开发文档和教程。
以下是一个使用STM32单片机的例子:#include "stm32f10x.h"void delay(uint32_t n)for(uint32_t i=0;i<n;i++);}int main(void)GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);TIM_TimeBaseStructure.TIM_Prescaler = 72-1;TIM_TimeBaseStructure.TIM_Period = 1000-1;TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;TIM_OCInitStructure.TIM_Pulse = 500-1;TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;TIM_OC1Init(TIM2, &TIM_OCInitStructure);TIM_OC1PreloadConfig(TIM2, TIM_OCPreload_Enable);TIM_ARRPreloadConfig(TIM2, ENABLE);TIM_Cmd(TIM2, ENABLE);while(1)}}步骤四:电路设计和调试完成单片机程序编写后,需要进行相应的电路设计和调试工作。
/**************************************************** 方波发生器程序朱铮南编写** 单片机STC15W404AS 方波输出端P1.1 时钟频率20MHz ** F<80KHz 占空比80%--20%** F>80KHz 占空比50%** 占空比分辨率:1%** 方波频率分辨率:** 0--999Hz 1Hz** 1KHz--9.99KHz 0.01KHz** 10KHz--99.9KHz 0.1KHz** 100KHz--200KHz 1KHz** 设定的频率和占空比保存在EEPROM,不会丢失** 频率保存在第一扇区,占空比保存在第二扇区** 外部中断0--3,分别用于频率增减和占空比增减**************************************************/#include <STC15W.h>#include <intrins.h>#define uchar unsigned char#define uint unsigned int#define ulong unsigned longulong freq; //Hz,输出方波频率uchar duty; //%,占空比sbit int0 = P3^2; //输出频率增sbit int1 = P3^3; //输出频率减sbit int2 = P3^6; //输出占空比增sbit int3 = P3^7; //输出占空比减sbit D7 = P1^5; //1602数据线sbit D6 = P1^4;sbit D5 = P1^3;sbit D4 = P1^2;sbit RS = P5^4; //1602数据/命令选择端sbit EN = P5^5; //1602使能信号端//RW接地uchar table0[ ]="F: 0000 Hz";uchar table1[ ]="D: 00 %";/**************************************************** 延时1ms**************************************************/void delay1ms(uchar x) //@20.000MHz{uchar i,j;do{i = 113;j = 20;do{while (--i);} while (--j);} while (--x);}/**************************************************** 向LCD1602写指令或数据**************************************************/void lcd_write(uchar com,date) //com=0则写指令,com=1则写数据{delay1ms(3);RS = com;EN = 1;D7 = date>>7;D6 = date>>6 & 0x1;D5 = date>>5 & 0x1;D4 = date>>4 & 0x1;EN = 0; //RW=0,EN从1跳到0时LCD1602执行写入delay1ms(3);EN = 1;D7 = date>>3 & 0x1;D6 = date>>2 & 0x1;D5 = date>>1 & 0x1;D4 = date & 0x1;EN = 0;}/**************************************************** LCD1602初始化**************************************************/void lcd_init(void){lcd_write(0,0x28);EN=1; //四线时没有这两行会乱码EN=0;lcd_write(0,0x28);lcd_write(0,0x28);lcd_write(0,0x0c); //显示开,无光标}/************************************************** ** LCD1602显示**************************************************/ void lcd_display(void){uchar i;if(freq<=9){table0[3]=freq+'0';table0[4]=' ';table0[5]='H';table0[6]='z';table0[7]=' ';table0[8]=' ';table0[9]=' ';table0[10]=' ';}else{if(freq<=99){table0[3]=freq/10+'0';table0[4]=freq%10+'0';table0[5]=' ';table0[6]='H';table0[7]='z';table0[8]=' ';table0[9]=' ';table0[10]=' ';}else{if(freq<=999){table0[3]=freq/100+'0';table0[4]=freq%100/10+'0';table0[5]=freq%10+'0';table0[6]=' ';table0[7]='H';table0[8]='z';table0[9]=' ';table0[10]=' ';}else{table0[7]=' ';table0[8]='K';table0[9]='H';table0[10]='z';if(freq<=9999){table0[3]=freq/1000+'0';table0[4]='.';table0[5]=freq%1000/100+'0';table0[6]=freq%100/10+'0';}else{if(freq<=99999){table0[3]=freq/10000+'0';table0[4]=freq%10000/1000+'0';table0[5]='.';table0[6]=freq%1000/100+'0';}else{table0[3]=freq/100000+'0';table0[4]=freq%100000/10000+'0';table0[5]=freq%10000/1000+'0';table0[6]=' ';table0[7]='K';table0[8]='H';table0[9]='z';table0[10]=' ';}}}}}table1[3]=duty/10+'0';table1[4]=duty%10+'0';lcd_write(0,0x00|0x80); //指定第一行的位置for(i=0;i<11;i++) lcd_write(1,table0[i]); //写入第一行lcd_write(0,0x40|0x80); //指定第二行的位置for(i=0;i<7;i++) lcd_write(1,table1[i]); //写入第二行}/************************************************** ** 频率写入EEPROM**************************************************/ void f_write(ulong dat){uchar i;IAP_CMD=3; //擦除命令IAP_ADDRL=0x0000; //擦除扇区的地址IAP_ADDRH=0x0000>>8;IAP_TRIG=0x5A; //激活命令IAP_TRIG=0xA5;IAP_CMD=2; //写入命令for(i=0;i<3;i++){switch (i){case 2:IAP_DA TA=dat;break; //要写入的数据case 1:IAP_DA TA=dat>>8;break;case 0:IAP_DA TA=dat>>16;}IAP_ADDRL=0x0000+i; //写入的地址IAP_ADDRH=(0x0000+i)>>8;IAP_TRIG=0x5A; //激活命令IAP_TRIG=0xA5;}}/************************************************** ** 从EEPROM读出频率**************************************************/ void f_read(void){uchar i;IAP_CMD=1; //读出命令for(i=0;i<3;i++){IAP_ADDRL=0x0000+i; //写入的地址IAP_ADDRH=(0x0000+i)>>8;IAP_TRIG=0x5A; //激活命令IAP_TRIG=0xA5;_nop_();freq=freq<<8|IAP_DA TA; //将读出的数据存入频率}}/************************************************** ** 占空比写入EEPROM**************************************************/ void d_write(uchar dat){IAP_CMD=3; //擦除命令IAP_ADDRL=0x0200; //擦除扇区的地址IAP_ADDRH=0x0200>>8;IAP_TRIG=0x5A; //激活命令IAP_TRIG=0xA5;IAP_CMD=2; //写入命令IAP_DATA=dat; //要写入的数据IAP_ADDRL=0x0200; //写入的地址IAP_ADDRH=0x0200>>8;IAP_TRIG=0x5A; //激活命令IAP_TRIG=0xA5;}/************************************************** ** 从EEPROM读出占空比**************************************************/ void d_read(void){IAP_CMD=1; //读出命令IAP_ADDRL=0x0200; //读出的地址IAP_ADDRH=0x0200>>8;IAP_TRIG=0x5A; //激活命令IAP_TRIG=0xA5;_nop_();duty=IAP_DATA; //将读出的数据存入占空比}/**************************************************** 初始化定时器0**************************************************/void init_time0(uchar i) //@20MHz1T{AUXR |= 0x80; //定时器0时钟工作在1T模式TMOD &= 0xF0; //设置定时器0工作在16位自动重载模式switch (i){case 1: //20MHz{TL0 = 0xFF;TH0 = 0xFF;}break;case 2: //2MHz{TL0 = 0xF6;TH0 = 0xFF;}break;case 3: //200KHz{TL0 = 0x9C;TH0 = 0xFF;}break;case 4: //20KHz{TL0 = 0x18;TH0 = 0xFC;}}TR0 = 1; //定时器0开始计时}/**************************************************** 主函数**************************************************/void main(void){ulong S_freq; //PCA计数源频率ulong cycle; //输出方波的周期uint plus; //输出方波的正半周uint minus; //输出方波的负半周uint V; //存放正负半周的临时变量bit j=1; //输出方波的正负半周标志uchar k; //传递给初始化定时器0函数的实参lcd_init(); //1602初始化EA=1; //中断总开关开CMOD=0x04; //PCA计数源选定为定时器0的溢出IT0=1; //外部中断0下降沿触发IT1=1; //外部中断1下降沿触发EX0=1; //允许外部中断0EX1=1; //允许外部中断1INT_CLKO|=0x30; //允许外部中断2、3IAP_CONTR=0x82; //允许对EEPROM读写d_read(); //从EEPROM读出占空比f_read(); //从EEPROM读出频率if(freq>80000)duty=50;lcd_write(0,0x01); //清屏lcd_display(); //显示//选择定时器0的溢出频率,保证输出方波周期在65535内if(freq>=306){k=1;S_freq=20000000;}if(freq<306 && freq>=31){k=2;S_freq=2000000;}if(freq<31 && freq>=4){k=3;S_freq=200000;}if(freq<4){k=4;S_freq=20000;}init_time0(k); //初始化定时器0cycle=S_freq/freq; //输出方波周期plus=cycle*duty/100; //计算正半周值。
如何产生方波matlab方波是一种具有正负交替的矩形波,是非常广泛用于电子、通信和控制领域中的一种波形。
对于某些学科来说,如电学和电子学等,方波也是一个十分重要的基本信号。
在Matlab中,产生方波可以采用sin函数和急轩波函数实现。
下面就让我们一起来看一下具体的制作过程吧。
制作方波的步骤如下:1.首先,打开Matlab软件,创建一个新的M文件。
2.定义一个变量,如n,表示生成方波的坐标轴范围,一般可以在0到4π之间取值。
3.定义一个变量,如freq,表示方波的频率,即在一个周期中包含的完整波形的数量。
4.定义一个变量,如amp,表示方波的振幅,即波形的峰值大小。
5.定义一个变量,如phase,表示方波的相位,即波形的偏移量。
6.利用sin函数,生成一个横坐标为n、纵坐标为1的正弦波。
7.通过将正弦波的所有正数部分取绝对值,再通过将其所有负数部分取绝对值,并减去1,将该波形转换成方波形式。
8.将生成的方波图形通过“plot”功能绘制到屏幕上。
9.添加图例和定制图形属性样式等必要的功能。
下面是一段Matlab程序示范,来说明如何实现产生方波:%% 首先,定义坐标轴的范围nn=0:0.1:4*pi;%% 定义产生方波的基本参数frequency=1; %% 频率为1,即一个完整波形在2pi秒内完成amplitude=1; %% 设置默认振幅为1phase=0; %% 设置默认相位为0%% 产生正弦波sin_wave=amplitude*sin(2*pi*frequency*n+phase);%% 通过将正弦波中的所有正数部分取绝对值,再通过将其所有负数部分取绝对值,并减去1,将其转换为方波square_wave=amplitude*(2*(sin_wave>=0)-1);%% 绘制方波图形plot(n,square_wave,'b');title('产生方波');xlabel('时间/秒');ylabel('电压/伏特');执行上述代码后,就可以在Matlab中成功产生一个方波了。

方波工作原理
方波工作原理是一种周期性变化的信号形式,它由两个不同电平的状态组成:高电平和低电平。
方波的周期是指从一个高电平到下一个高电平所经历的时间,而占空比则是高电平所占据的时间比例。
方波的产生通常是通过对一个连续信号进行周期性的开关,使其在固定的时间内保持高电平或低电平状态。
这可以通过使用电子元件如开关、晶体管或集成电路实现。
具体实现方式可以是通过一个周期性的时钟信号来控制一个开关,使其在每个时钟周期内根据特定规则切换电平状态。
例如,当时钟信号处于高电平时,开关闭合并输出高电平;而当时钟信号处于低电平时,开关断开并输出低电平。
方波在电子技术中具有广泛的应用,例如在数字电路中作为时钟信号、脉冲计数器中的输入信号、PWM调制中的基础波形等。
它的特点是具有频率可调、占空比可变的特性,因此在不同的应用场景中可以根据需要进行灵活调整。
总之,方波工作原理是通过周期性的开关操作来实现的,它可以分为高电平和低电平两种状态,通过调整开关操作的时间和规则,可以实现不同频率和占空比的方波输出。
一、方波的合成与分解1、傅立叶级数分析的原理:任何周期信号都可以用一组三角函数{sin(nω0t),cos(nω0t)}的组合表示:这表明傅立叶级数可以表示为连续时间的周期信号,也即是连续时间周期信号可以分解为无数多个复指数谐波分量。
在这里为傅立叶级数的系数,称为基波频率。
2、建立方波信号的模型:思考:如何建立连续周期方波信号?①预置一个周期内的方波信号:-A (-T/2<t<0)一个完整周期内的信号表达式:=A (0<t<T/2)②对方波信号以周期T进行平移:通过以上的两个步骤我们可以建立一个连续周期方波信号,为降低方波信号分解与合成的复杂程度,可以预置方波信号为奇谐信号,此连续时间周期方波信号如下:3、方波信号分解:由以上可知道,此方波信号可以分解为各奇次谐波。
方波的各奇次谐波可由如下Matlab 语句得到:t=0:0.001:2*pi;w=1;N=[1;3;5;7;9;11];k=1;while k<=6n=N(k,:); %基次谐波的次数b=4./(pi*n);x=b*sin(w*n*t);subplot(3,2,k),plot(t,x);xlabel('t'),ylabel('x(t)');axis([0,2*pi,-2,2]),legend(['N次谐波'])k=k+1;end输出图像如下:4、方波信号合成:对连续周期方波信号各谐波分量(基波分量、三次波分量、五次波分量……)分别进行求和运算,步骤如下:①考查一个完整周期(0~2π)这段时间内的信号,画出结果,并显示。
②画出基波分量,并显示,观察与原周期方波信号的误差大小。
③将三次谐波加到第二步之上,画出结果,并显示,观察与原周期方波信号的误差大小。
④将五次谐波加到第三步之上,画出结果,并显示,观察与原周期方波信号的误差大小。
⑤将七次谐波与九次谐波加到第四步之上,画出结果,并显示,观察与原周期方波信号的误差大小。
基于单片机的方波信号发生器设计为了实现方波信号的发生器,我们可以使用单片机来实现,单片机可以通过编程来控制方波信号的频率和占空比。
在这里,我将介绍一种基于单片机的方波信号发生器的设计。
首先,我们需要选择一个合适的单片机来作为我们的控制器。
常用的单片机有Arduino、STM32等。
在这里,我们选择使用Arduino Uno作为控制器。
Arduino Uno是一种开源的微控制器板,使用ATmega328P芯片,具有易用性和良好的稳定性。
接下来,我们需要连接一块电路板用于输出方波信号。
为了实现方波信号的生成,我们可以使用一个555定时器芯片来实现。
555定时器可以方便地产生方波信号。
我们将在Arduino Uno和555定时器之间进行串联连接,Arduino Uno将通过编程来控制555定时器的工作。
接下来,我们需要编写Arduino的程序来控制方波信号的频率和占空比。
我们可以使用Arduino的PWM输出功能来控制方波信号的频率。
通过调整PWM的占空比,我们可以控制方波信号的占空比。
以下是一个简单的Arduino程序示例:```c//定义信号输出引脚#define SIGNAL_PIN 9void setu//将信号输出引脚设为输出模式pinMode(SIGNAL_PIN, OUTPUT);void loo//设置PWM频率为1kHzint frequency = 1000;//设置PWM占空比为50%int dutyCycle = 50;//计算PWM周期//计算PWM高电平时间int highTime = period * dutyCycle / 100;while (true)//输出高电平digitalWrite(SIGNAL_PIN, HIGH);delayMicroseconds(highTime);//输出低电平digitalWrite(SIGNAL_PIN, LOW);delayMicroseconds(period - highTime);}```在这个示例程序中,我们定义了信号输出引脚为9号引脚,在setup 函数中将其设为输出模式。
方波的工作原理
方波的工作原理是基于一个周期性的信号波形,它的振幅在一个特定的时间间隔内取两个固定的值,分别是高电平(通常为正电压值)和低电平(通常为零电压值)。
方波的生成通常依靠一个叫做方波发生器的电路。
这个电路包含了一个基准振荡器和一个比较器。
基准振荡器负责提供一个高频率的连续信号。
这个信号先经过一个分频器,将其频率降低,变成一个较低频率的信号。
然后,这个较低频率的信号与一个参考电压进行比较,通过比较器来产生一个方波信号。
当基准振荡器的输出电压高于参考电压时,比较器的输出信号为高电平;当基准振荡器的输出电压低于参考电压时,比较器的输出信号为低电平。
这样,就形成了一个周期性变化的方波信号。
方波的工作原理基于比较器对输入信号进行比较与判断,根据比较结果产生输出信号的高低电平。
这种特定的波形使得方波在电子电路中有着广泛的应用,例如数字信号处理、通信系统、计算机数据传输等领域。
基于51单片机的方波发生程序这是一个最简单的程序,在定时器的控制下由p1.0 脚发出500 赫兹的方波要求:6MHz 的晶振,P1.0 引脚产生500Hz 的方波代码如下:#includereg52.hsbit P1_0=P1;void int_X_T(){IE=0x82;TMOD=0x01;TH0=(65536- 500)/256;TL0=(65536-500)%256;TR0=1;?? ??}void int_x() interrupt 1{TH0=(65536-500)/256;TL0=(65536-500)??%256;P1_0=!P1_0;}voidmain()??{int_X_T();while(1);}---------------------------------------------------------------------------------------------------------------------------还有一个程序://用中断方式控制定时器方式1(16 位定时器),完成1s 的脉冲,1S 亮,1S 灭,P0 口控制LED //#includereg52.h#define uchar unsigned char#define uint unsigned intsbit d0=P0;uint num,a,b;void main(){EA=1;ET0=1;TR0=1;//或者是TCON=0X10// 定时器0 工作//TMOD=0X01;///这是设置定时器的工作方式:定时器0 的方式1//TH0=0X3C;TL0=0XB0;//给定时器放初值//PT0=1;while(1){if(num==4000){d0=!d0;num=0;}}}void timer0() interrupt 1{TH0=0X3C;TL0=0XB0;// 中断定时器方式1 定时,当定时到时,TF0 溢出标志自动清零,//同时定时器的计数器计满自动清零,如果不加,则计时时间变化num++;}tips:感谢大家的阅读,本文由我司收集整编。
编写程序,T1工作在方式1下,从p1.0,P1.1……p1.7分别输出周期为1,2,4,8,16,32,64,128秒的方波org 0000hljmp startorg 001bhljmp int_timerorg 0030hstart:mov p1,#00hmov r0,#00hmov r7,#10anl tmod,#0fhorl tmod,#10hmov th1,#3chmov tl1,#0b0hsetb easetb et1setb tr1sjmp $int_timer:mov th1,#3chmov tl1,#0b0hdec r7cjne r7,#0,nextinc r0mov a,r0mov p1,amov r7,#10cjne r0,#0ffh,nextmov r0,#00hnext:retiendP1.7P1.6P1.5P1.4P1.3P1.2P1.1P1.0编码值时间0000000000h 0到0.5s 0101h0.5到1.0s 0000001002h 1.5s 0000001103h 2.0s 0000010004h 2.5s 0000010105h 3.0s 01106h3.5s方波产生原理说明:自己画一个P1.0到P1.7的波形图,对照下表,就能明白这个程序的原理了表格没有全画出来,规律很好找,把所有的波形用编码表示出来,每过0.5秒,向P1口发送一个数,综合起来的效果就是所需的了,因为题目比较特舒,很容易找到规律。
假如只是P1.0,P1.2,P1.4三个口分别输出周期是1,2,4秒的方波,那就得把编码放到一个表格里,用查表法写程序了00111074.0s 014.5s01001 5.0s01010 5.5s01011 6.0s01100 6.5s011017.0s011107.5s 程序说明:org 0000hljmp startorg 001bh ;中断程序入口(8051程序存储器有7个特殊地址,0003h为外部中断0的入口地址,000bh是定时器/计数器0的中断入口地址,0013h,001bh是定时器/计数器1的中断入口地址,0023h,002bh,因为它们每个地址之间仅隔8个单元,如果中断程序比较长的话,通常放一条绝对转移指令,转到真正的中断服务程序,而把真正的中断服务程序放在后面)ljmp int_timerorg 0030h ;程序从0030h开始存放在程序存储区start: ;主程序mov p1,#00h ;开始把P18个口全部给0mov r0,#00hmov r7,#10 ;R7用来作为定时器中断次数的计数寄存器anl tmod,#0fh ;T1工作在方式1orl tmod,#10hmov th1,#3ch ; 定时0.05s,则计数初值为15536(3cb0h)mov tl1,#0b0hsetb ea ;开放总中断setb et1 ;允许T1中断setb tr1 ;启动计数sjmp $ ;死循环,但CPU每隔一定时间会自动检测是否有中断;请求,若有中断且相关中断允许,则CPU响应中断,跳转到中断入口,执行中断程序int_timer: ;中断程序mov th1,#3ch ;T1或T0工作在方式1不能自动重置初值,此处重新赋mov tl1,#0b0h ;计数初值dec r7 ;有一次中断,定时经过了0.05秒,R7减1cjne r7,#0,next ;R7不为0,中断返回,继续等待中断,R7为0,说明inc r0 ;T1产生10次中断,一共定时0.5秒,0.5秒到,第一把R0加1,并赋给A,在由A送到P1口输出,第二要把R7重新赋为10,以便下一次定时mov a,r0mov p1,amov r7,#10cjne r0,#0ffh,next;R0增到0FFH,即P1.0到P1.7全为1,则把R0清零,并返回开始下一次大循环,若R0不为0FFH,说明128秒的方波还没有输出,则跳转到next,返回到中断的断点处,等待T1溢出(T1溢出时TF1由内部硬件电路置1,并向CPU发出中断请求)mov r0,#00h ;把R0清零(即R0复位)next:reti ;返回到断点处end思考inc r0 能否放在mov p1,a语句的后面,为什么?若放在后面对输出波形有何影响编程关键:要清楚地知道程序如何执行,是什么样的过程。
keil写方波程序要在Keil中编写方波程序,您需要使用C语言编写代码,并使用Keil进行编译和调试。
以下是一个简单的示例程序,用于生成方波信号:```cinclude <>include <>include <>include <>define PIint main(void){double frequency = ; // 方波频率,单位为Hzdouble period = / frequency; // 方波周期,单位为秒double amplitude = ; // 方波幅度,单位为Vdouble duty_cycle = ; // 方波占空比,范围为0到1之间int i;double value;// 循环生成方波信号for (i = 0; i < 1000; i++) {// 根据占空比计算方波值if (i % (2 period) < period duty_cycle) {value = amplitude;} else {value = -amplitude;}printf("%f\n", value);usleep; // 延时10毫秒,根据需要调整延时时间}return 0;}```在上面的示例程序中,我们定义了方波的频率、幅度、占空比和周期等参数。
然后使用一个循环来生成方波信号,根据占空比计算每个采样点的方波值,并使用printf函数将方波值输出到标准输出流中。
最后,我们使用usleep函数实现延时,以控制方波的频率。
请注意,这只是一个简单的示例程序,实际的方波生成器可能需要根据具体的硬件和要求进行修改和调整。
产生方波的四种方法
1.脉冲宽度调制(PWM):
PWM是一种通过调整脉冲的宽度来产生方波的方法。
在PWM中,周期性的脉冲信号与一个固定频率的参考信号进行比较。
当脉冲信号的幅度大于参考信号时,输出为高电平;当脉冲信号的幅度小于参考信号时,输出为低电平。
通过调整脉冲信号的占空比,可以实现不同频率的方波信号。
2.集成电路产生器:
集成电路产生器是一种使用特殊的电路芯片来产生方波的方法。
在集成电路产生器中,常用的芯片有NE555、CD4047等。
这些芯片内部集成了多个逻辑门电路,通过调整电路中的元件的参数(如电容电阻),可以控制输出波形的频率和占空比。
集成电路产生器的优点是电路结构简单,使用方便。
3.数字逻辑电路:
在数字逻辑电路中,可以通过组合逻辑电路或者时序逻辑电路来产生方波。
组合逻辑电路是由与、或、非等基本逻辑门组成的电路,通过将多个门的输出作为输入,经过适当的逻辑运算,可以得到方波输出。
时序逻辑电路则是由触发器、计数器等组成,通过它们内部的状态变化来产生方波信号。
4.软件产生:
在数字信号处理领域,可以利用计算机或者嵌入式系统软件来产生方波。
通过编写程序,可以控制系统的输出引脚输出高低电平的变化,从而产生方波信号。
这种方法通常需要使用专门的软件开发工具,如C语言、
Python等。
软件产生方波的优点是调试方便、精度高,但需要有一定的软件开发能力。
综上所述,产生方波的方法有脉冲宽度调制、集成电路产生器、数字逻辑电路以及软件产生等。
根据具体的应用需求和实际情况选择合适的方法,可以有效地产生方波信号。