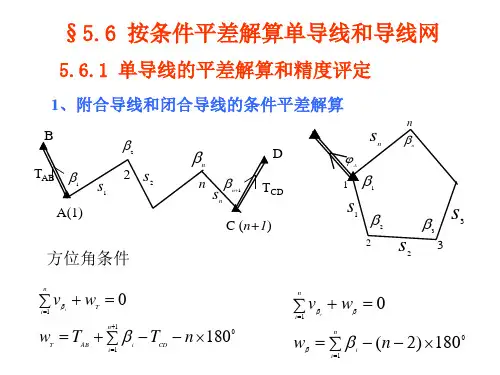
导线网平差及精度评定程序设计平差
- 格式:docx
- 大小:37.54 KB
- 文档页数:5
计算方案的设置一、导线类型:1.闭、附合导线(图1)2.无定向导线(图2)3.支导线(图3)4.特殊导线及导线网、高程网(见数据输入一节),该选项适用于所有的导线,但不计算闭合差。
而且该类型不需要填写未知点数目。
当点击表格最后一行时自动添加一行,计算时删除后面的空行。
5.坐标导线。
指使用全站仪直接观测坐标、高程的闭、附合导线。
6.单面单程水准测量记录计算。
指仅进行单面读数且仅进行往测而无返测的水准测量记录计算。
当数据中没有输入“中视”时可以用作五等、等外水准等的记录计算。
当输入了“中视”时可以用作中平测量等的记录计算。
说明:除“单面单程水准测量记录计算”仅用于低等级的水准测量记录计算外,其它类型选项都可以进行平面及高程的平差计算,输入了平面数据则进行平面的平差,输入了高程数据则进行高程的平差,同时输入则同时平差。
如果不需进行平面的平差,仅计算闭、附合高程路线,可以选择类型为“无定向导线”,或者选择类型为“闭附合导线”但表格中第一行及最后一行数据(均为定向点)不必输入,因为高程路线不需定向点。
二、概算1.对方向、边长进行投影改化及边长的高程归化,也可以只选择其中的一项改正。
2.应选择相应的坐标系统,以及Y坐标是否包含500KM。
选择了概算时,Y坐标不应包含带号。
三、等级与限差1.在选择好导线类型后,再选择平面及高程的等级,以便根据《工程测量规范》自动填写限差等设置。
如果填写的值不符合您所使用的规范,则再修改各项值的设置。
比如现行的《公路勘测规范》的三级导线比《工程测量规范》的三级导线要求要低一些。
2.导线测量平差4.2及以前版本没有设置限差,打开4.2及以前版本时请注意重新设置限差。
四、近似平差与严密平差的选择及近似平差的方位角、边长是否反算1.近似平差:程序先分配角度闭合差再分配坐标增量闭合差,即分别平差法。
2.严密平差:按最小二乘法原理平差。
3.《工程测量规范》规定:一级及以上平面控制网的计算,应采用严密平差法,二级及以下平面控制网,可根据需要采用严密或简化方法平差。
《测量平差课程设计》设计报告设计名称:测量平差课程设计学院名称:矿业工程学院专业班级:测绘12-2 学生姓名:雷蕾学号: 2012020782 指导教师:张红华测绘工程教研室2014年8月一.课程设计的目的《测量平差》是一门理论与实践并重的课程,测量平差课程设计是测量数据处理理论学习的一个重要实践环节,是在学生学习了专业基础理论课《误差理论与测量平差基础》课程后进行的一门实践课程,其目的是增强学生对测量平差基础理论的理解,牢固掌握测量平差的基本原理和公式,熟悉测量数据处理的基本原理和方法,灵活准确地应用于解决各类数据处理的实际问题,并能用所学的计算机基础知识,编制简单的计算程序。
二.课程设计题目内容描述和要求1.设计的任务(1)该课的课程设计安排在理论学习结束之后进行的,主要是平面控制网和高程控制网严密平差,时间为一周。
(2)通过课程设计,培养学生运用本课程基本理论知识和技能,分析和解决本课程范围内的实际工程问题的能力,加深对课程理论的理解与应用。
(3)在指导老师的指导下,要求每个学生独立完成本课程设计的全部内容。
2.课程设计要求2.1基本要求:测量平差课程设计要求每一个学生必须遵守课程设计的具体项目的要求,独立完成设计内容,并上交设计报告。
在学习知识、培养能力的过程中,树立严谨、求实、勤奋、进取的良好学风。
课程设计前学生应认真复习教材有关内容和《测量平差》课程设计指导书,务必弄清基本概念和本次课程设计的目的、要求及应注意的事项,以保证保质保量的按时完成设计任务。
2.2具体设计项目内容及要求:2.2.1高程控制网严密平差及精度评定总体思路:现有等级水准网的全部观测数据及网型、起算数据。
要求对该水准网,分别用条件、间接两种方法进行严密平差,并检验。
进行平差模型的正确性水准网的条件平差:①列条件平差值方程、改正数条件方程、法方程;②利用自编计算程序解算基础方程,求出观测值的平差值、待定点的高程平差值;③评定观测值平差值的精度和高程平差值的精度。
水准网平差程序设计水准网平差是测绘工程中的一项重要工作,它涉及到对水准测量数据进行处理,以达到测量精度的要求。
水准网平差程序设计通常需要考虑以下几个方面:1. 程序设计的目的和意义水准网平差程序设计的主要目的是通过计算机软件对水准测量数据进行自动化处理,提高数据处理的效率和准确性。
这对于大型工程测量、城市基础设施建设、土地管理等领域具有重要意义。
2. 程序设计的基本要求- 准确性:程序需要能够准确地处理水准测量数据,减少人为误差。
- 稳定性:程序在运行过程中应具有较高的稳定性,避免因系统崩溃等原因导致数据丢失。
- 用户友好性:程序应具备良好的用户界面,使得非专业用户也能方便地使用。
- 扩展性:程序设计应考虑未来可能的功能扩展,以适应不断变化的测量需求。
3. 程序设计的理论基础水准网平差程序设计的理论基础主要包括:- 水准测量原理:了解水准测量的基本原理,包括视线高、转点高、已知点高程等概念。
- 误差理论:掌握测量误差的来源、分类及其对测量结果的影响。
- 最小二乘法:水准网平差通常采用最小二乘法进行数据处理,需要理解其数学原理和应用方法。
4. 程序设计的关键技术- 数据输入:设计高效的数据输入界面,支持多种数据格式的导入。
- 数据处理:实现数据的自动校验、筛选和处理功能。
- 平差计算:编写平差计算算法,包括闭合差计算、误差分配等。
- 结果输出:设计结果输出模块,支持多种输出格式,如文本、图表等。
5. 程序设计的实现步骤1. 需求分析:明确程序设计的目标和用户需求。
2. 系统设计:设计程序的整体架构,包括模块划分、数据流等。
3. 编码实现:根据设计文档进行编码,实现各个功能模块。
4. 测试验证:对程序进行测试,确保其准确性和稳定性。
5. 用户手册编写:编写用户手册,指导用户如何使用程序。
6. 程序设计的注意事项- 数据安全:确保程序在处理数据时的安全性,防止数据泄露。
- 异常处理:程序应能妥善处理各种异常情况,如数据格式错误、计算溢出等。
计算方案的设置一、导线类型:1.闭、附合导线(图1)2.无定向导线(图2)3.支导线(图3)4.特殊导线及导线网、高程网(见数据输入一节),该选项适用于所有的导线,但不计算闭合差。
而且该类型不需要填写未知点数目。
当点击表格最后一行时自动添加一行,计算时删除后面的空行。
5.坐标导线。
指使用全站仪直接观测坐标、高程的闭、附合导线。
6.单面单程水准测量记录计算。
指仅进行单面读数且仅进行往测而无返测的水准测量记录计算。
当数据中没有输入“中视”时可以用作五等、等外水准等的记录计算。
当输入了“中视”时可以用作中平测量等的记录计算。
说明:除“单面单程水准测量记录计算”仅用于低等级的水准测量记录计算外,其它类型选项都可以进行平面及高程的平差计算,输入了平面数据则进行平面的平差,输入了高程数据则进行高程的平差,同时输入则同时平差。
如果不需进行平面的平差,仅计算闭、附合高程路线,可以选择类型为“无定向导线”,或者选择类型为“闭附合导线”但表格中第一行及最后一行数据(均为定向点)不必输入,因为高程路线不需定向点。
二、概算1.对方向、边长进行投影改化及边长的高程归化,也可以只选择其中的一项改正。
2.应选择相应的坐标系统,以及Y坐标是否包含500KM。
选择了概算时,Y坐标不应包含带号。
三、等级与限差1.在选择好导线类型后,再选择平面及高程的等级,以便根据《工程测量规范》自动填写限差等设置。
如果填写的值不符合您所使用的规范,则再修改各项值的设置。
比如现行的《公路勘测规范》的三级导线比《工程测量规范》的三级导线要求要低一些。
2.导线测量平差4.2及以前版本没有设置限差,打开4.2及以前版本时请注意重新设置限差。
四、近似平差与严密平差的选择及近似平差的方位角、边长是否反算1.近似平差:程序先分配角度闭合差再分配坐标增量闭合差,即分别平差法。
2.严密平差:按最小二乘法原理平差。
3.《工程测量规范》规定:一级及以上平面控制网的计算,应采用严密平差法,二级及以下平面控制网,可根据需要采用严密或简化方法平差。
实验三利用mat lab程序设计语言完成某工程导线网平差计算实验数据;某工程项目按城市测量规范(CJJ8-99)不设一个二级导线网作为首级平面控制网,主要技术要求为:平均边长200cm,测角中误差±8,导线全长相对闭合差<1/10000,最弱点的点位中误差不得大于5cm,经过测量得到观测数据,设角度为等精度观测值、测角中误差为山=±8秒,鞭长光电测距、测距中误差为m二± Vsmm,根据所学的‘误差理论与测量平差基础'提出一个最佳的平差方案,利用matlab完成该网的严密平差级精度评定计算;平差程序设计思路:1采用间接平差方法,12个点的坐标的平差值作为参数.利用matlab进行坐标反算,求出已知坐标方位角;根据已知图形各观测方向方位角;2计算各待定点的近似坐标,然后反算出近似方位角,近似边. 计算各边坐标方位角改正数系数;3确定角和边的权,角度权Pj=1 ;边长权Ps=100/S;4计算角度和边长的误差方程系数和常数项,列出误差方程系数矩阵 B,算出Nbb=B’ PB,W=B’ Pl,参数改正数 x=inv(Nbb)*W;角度和边长改正数V=Bx-l; 6建立法方程和解算x,计算坐标平差值,精度计算;程序代码以及说明:s10=;s20=;s30=;s40=;s50=;s60=;s70=;s80=;s90=;s100=;s110=;s120=;s130=;s140=; %已知点间距离Xa=;Ya二;Xb=;Yb=;Xc=;Yc=;Xd=;Yd=;Xe=;Ye=;Xf=;Yf=; %已知点坐标值a0=atand((Yb-Ya)/(Xb-Xa))+180;d0=atand((Yd-Yc)/(Xd-Xc));f0=atand((Yf-Ye)/(Xf-Xe))+360; %坐标反算方位角a1=a0+(163+45/60+4/3600)-180a2=a1+(64+58/60+37/3600)-180;a3=a2+(250+18/60+11/3600)-180;a4=a3+(103+57/60+34/3600)-180;a5=d0+(83+8/60+5/3600)+180;a6=a5+(258+54/60+18/3600)-180-360;a7=a6+(249+13/60+17/3600)-180;a8=a7+(207+32/60+34/3600)-180;a9=a8+(169+10/60+30/3600)-180;a10=a9+(98+22/60+4/3600)-180;a12=f0+(111+14/60+23/3600)-180;a13=a12+(79+20/60+18/3600)-180;a14=a13+(268+6/60+4/3600)-180;a15=a14+(180+41/60+18/3600)-180; %推算个点方位角 aa=[a1 a2 a3 a4 a5 a6 a7 a8 a9 a10 a12 a13 a14 a15]'X20=Xb+s10*cosd(a1);X30=X20+s20*cosd(a2);X40=X30+s30*cosd(a3);X50a=X40+s40*cosd(a4);X60=Xd+s50*cosd(a5);X70=X60+s60*cosd(a6);X80=X70+s70*cosd(a7);X90=X80+s80*cosd(a8);X100=X90+s90*cosd(a9);X50c=X100+s100*cosd(a10);X130二Xf+s110*cosd(a12);X140=X130+s120*cosd(a13);X150=X140+s130*cosd(a14);X50e=X150+s140*cosd(a15); %各点横坐标近似值X0=[X20 X30 X40 X60 X70 X80 X90 X100 X130 X140 X150 X50a X50c X50e]'Y20=Yb+s10*sind(a1);Y30=Y20+s20*sind(a2);Y40=Y30+s30*sind(a3);Y50a=Y40+s40*sind(a4);Y60=Yd+s50*sind(a5);Y70=Y60+s60*sind(a6);Y80=Y70+s70*sind(a7);Y90=Y80+s80*sind(a8);Y100=Y90+s90*sind(a9);Y50c=Y100+s100*sind(a10);Y130=Yf+s110*sind(a12);Y140=Y130+s120*sind(a13);Y150=Y140+s130*sind(a14);Y50e=Y150+s140*sind(a15); %个点从坐标近似值Y0=[Y20 Y30 Y40 Y60 Y70 Y80 Y90 Y100 Y130 Y140 Y150 Y50a Y50c Y50e]'P=[X0 Y0];X50=(X50a+X50c+X50e)/3Y50=(Y50a+Y50c+Y50e)/3s4二sqrt((Y40-Y50)"2+(X40-X50厂2);si二sqrt((Y100-Y50厂2+(X100-X50厂2);s14二sqrt((Y150-Y50)"2+(X150-X50厂2);A1=[cosd(a1) cosd(a2) cosd(a3) cosd(a4) cos(a5) cosd(a6) cosd(a7) cosd(a8) cosd(a9) cosd(a10) cosd(a12) cosd(a13) cosd(a14) cosd(a15)]';B11=[sind(a1) sind(a2) sind(a3) sind(a4) sin(a5) sind(a6) sind(a7) sind(a8) sind(a9) sind(a10) sind(a12) sind(a13) sind(a14) sind(a15)]';s=blkdiag(s10,s20,s30,s4,s50,s60,s70,s80,s90,s10',s110,s120,s130,s14);a=*inv(s)*B11b=*inv(s)*A1ab4=atand((Y50-Y40)/(X50-X40))+180;ab10=atand((Y50-Y100)/(X50-X100));ab14=atand((Y50-Y150)/(X50-X150))+360;m4=ab4-a3+180;m10=ab10-a9+180;m11=ab4-ab10;m15=ab14-a14+180;m16=ab10-ab14+360;m04=103+57/60+34/3600;m010=98+22/60+4/3600;m011=94+53/60+50/3600;m015=180+41/60+18/3600;m016=ab10-ab14+360;l=[0 0 0 m4-103-57/60-34/3600 0 0 0 0 0 m10-98-22/60-4/3600 m11-94-53/60-50/3600 0 0 0 m15T80-41/60T8/3600m16-103-23/60-8/3600 0 0 0 s40-s4 0 0 0 0 0 s100-s1 0 0 0 s140-s14]';e1=(abs(X20-Xb))/s10;e2=(abs(X30-X20))/s20;e3=(abs(X40-X30))/s30;e4=(abs(X50-X40))/s4;e5=(abs(X60-Xd))/s50;e6= (abs(X70-X60))/s60;e7=(abs(X80-X70))/s70;e8=(abs(X90-X80))/s80;e9=(abs(X100-X90))/s90;e10=(abs(X50-X100))/s1;e11=(abs(X130-Xf))/s110;e12=(abs(X140-X130 ))/s120;e13=(abs(X150-X140))/s130;e14=(abs(X50-X150))/s 14;e=[e1 e2 e3 e4 e5 e6 e7 e8 e9 e10 e11 e12 e13 e14]' m1=(abs(Y20-Yb))/s10;m2=(abs(Y30-Y20))/s20;m3=(abs(Y40-Y30))/s30;m4=(abs(Y50-Y40))/s4;m5=(abs(Y60-Yd))/s50;m6= (abs(Y70-Y60))/s60;m7=(abs(Y80-Y70))/s70;m8=(abs(Y90-Y80))/s80;m9=(abs(Y100-Y90))/s90;m10=(abs(Y50-Y100))/s1;m11=(abs(Y130-Yf))/s110;m12=(abs(Y140-Y130 ))/s120;m13=(abs(Y150-Y140))/s130;m14=(abs(Y50-Y150))/s 14;m=[m1 m2 m3 m4 m5 m6 m7 m8 m9 m10 m11 m12 m13 m14]' % 以上为求得误差方程系数B=[ 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0%系数矩阵B0 0 ]P=blkdiag(1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,100/s10,100/s 20,100/s30,100/s40,100/s50,100/s60,100/s70,100/s80,100/ s90,100/s100,100/s110,100/s120,100/s130,100/s140); %定义权矩阵Nbb二B'*P*BW=B'*P*l;x=inv(Nbb)*WV=B*x-l;inv(Nbb);Y=V'*P*V;O二sqrt(Y/6)*3600 %精度评定计算结果:平差值坐标X:+003 *Qx1= Qy1= Qx2= Qy2= ……Qx15= Qy15=。
山西水利职业技术学院实习报告题目导线平差的程序设计与实现姓名:孟国娇学号:专业:工程造价1139报告提交日期:山西水利职业技术学院设计任务书学院:土建工程系专业年级:工程造价2011 学生姓名:孟国娇任务下达日期:2012年 2 月20日毕业设计日期:2012年3月12日至2012年6月13日毕业设计题目:导线平差的程序设计与实现毕业设计主要内容和要求:主要内容:(1)测量平差的研究背景及意义;(2)测量平差概述;(3)Excel在单一附和导线近似平差中的应用;(4)Excel在单一附和导线条件平差中的应用;(5)导线网的间接平差理论;(6)导线网平差的结构和函数设计与实现。
设计要求:(1)毕业设计要充分发挥主观能动性,积极思考,主动实践;(2)毕业设计撰写结构要严整,叙述清楚,理论分析适当,数据可靠,研究方法合理,结论正确,论文格式符合规范;(3)研究成果要有一定的实用或参考价值。
院长签字:指导教师签字:摘要随着测绘科学技术的不断发展,在测量数据的处理中产生很多种平差的方法。
在本文中,导线网的近似平差和条件平差的一些简单计算可通过Excel表编制计算公式和编程实现,我们只需在已编好的Excel表中稍作调整和公式修改,并输入已知数据,最终就可得到所需的平差结果,这为测量的内业工作提供了服务和参考;导线网的间接平差程序是利用C++编程实现的,我们需要将导线网的已知数据信息按照特定的规则输入到dat文本中,利用C++程序读取文本数据信息后,对其进行一系列的平差计算,最终获得平差后的结果,并以dat文本的形式输出且保存,这样就可为测量工作提供一定的参考,还能为测绘数据的管理带来帮助。
关键词:导线平差;Excel;C++;程序目录1绪论...............................................................................................................................................1.1研究背景及意义.................................................................................................................1.2国内外研究状况.................................................................................................................1.3本文研究的具体内容.........................................................................................................1.4平差程序相关说明.............................................................................................................1.4.1平差程序计算特点..................................................................................................1.4.2平差程序的基本要求..............................................................................................1.4.3平差程序的结构化设计..........................................................................................1.4.4平差程序模块化......................................................................................................1.4.5平差程序的数据结构.............................................................................................. 2测量平差.......................................................................................................................................2.1测量平差概述.....................................................................................................................2.1.1测量平差..................................................................................................................2.1.2测量平差的函数模型..............................................................................................2.2最小二乘原理.....................................................................................................................2.3条件平差原理.....................................................................................................................2.3.1条件平差的数学模型..............................................................................................2.3.2条件平差原理..........................................................................................................2.3.3条件平差的计算步骤..............................................................................................2.3.4精度评定..................................................................................................................2.4间接平差原理.....................................................................................................................2.4.1间接平差的数学模型..............................................................................................2.4.2间接平差的的一般原理..........................................................................................2.4.3按间接平差法求平差值的计算步骤......................................................................2.4.4精度评定.................................................................................................................. 3Excel在导线平差中的应用.........................................................................................................3.1 Excel在平差中的应用基础...............................................................................................3.1.1 引言.........................................................................................................................3.1.2Excel在平差中的基本应用操作函数...................................................................3.1.3 核心问题的解决及技巧.........................................................................................3.1.4 三角函数在Excel中的处理方法..........................................................................3.1.5 小结.........................................................................................................................3.2Excel在附和导线近似平差中的应用..............................................................................3.2.1 单一附和导线近似平差.........................................................................................3.2.2单一附和导线近似平差实例..................................................................................3.3 Excel在导线网条件平差中的应用...................................................................................3.3.1单一附合导线条件平差..........................................................................................3.3.2边角权的确定及单位权中误差..............................................................................3.3.3单一附和导线条件平差实例.................................................................................. 4导线网的间接平差程序设计与实现 ...........................................................................................4.1矩阵的相关函数.................................................................................................................4.1.1矩阵相乘..................................................................................................................4.1.2矩阵转置..................................................................................................................4.1.3矩阵求逆..................................................................................................................4.1.4矩阵输出..................................................................................................................4.1.5设置实数输出精度..................................................................................................4.2平差中的重要函数.............................................................................................................4.2.1角度制与弧度制的相互转化..................................................................................4.2.2测量正反算函数......................................................................................................4.2.3近似坐标计算..........................................................................................................4.3导线网的平差理论.............................................................................................................4.3.1平差概述..................................................................................................................4.3.2边角网的最小二乘平差..........................................................................................4.4间接平差的结构与函数设计.............................................................................................4.4.1间接平差..................................................................................................................4.4.2结构与函数设计......................................................................................................4.5导线网平差的程序应用.....................................................................................................4.5.1平面网数据的输入格式..........................................................................................4.5.2导线网平差程序应用实例...................................................................................... 5结论与展望 ...................................................................................................................................5.1Excel在导线平差中的应用..............................................................................................5.1.1Excel在导线近似平差中的应用...........................................................................5.1.2Excel在导线网条件平差中的应用.......................................................................5.2C++在导线平差中的应用 .................................................................................................5.3测量平差的展望................................................................................................................ 参考文献........................................................................................................................................... 致谢. (54)1绪论1.1研究背景及意义测量工作是工程施工非常基础、重要的环节,对工程设计、工程施工、工程的验收都发挥着指导性、不可替代的作用。
3-3--导线网条件平差计算§3-3 导线网条件平差计算2学时导线网,包括单一附合导线、单一闭合导线和结点导线网,是目前较为常用的控制测量布设方式之一,其观测值有长度观测值和角度观测值。
在本节中我们主要讨论单一导线的平差计算,先讨论单一附合导线问题。
一.单一附合导线条件平差如图3-6所示,在这个导线中有四个已知点、n -1个未知点、n+1个水平角观测值和n条边长观测值,总观测值数为2n+1。
从图中可以分析,要确定一个未知点的坐标,必须测一条导线边和一个水平角,即需要两个观测值;要确定全部n -1个未知点,则需观测n -1个导线边和n -1个水平角,即必要观测值数t = 2n -2;则多余观测个数r = (2n +1) –t = 3。
也就是说,在单一附合导线中,只有三个条件方程。
下面讨论其条件方程式及改正数条件方程式的写法。
(3-3-4) 其中)180)1(][(110CD n i T T n T w -⋅+±+-=+ β2.纵坐标附合条件式 终点C 坐标平差值表示为n i B n x x x11]ˆ[ˆ∆+=+(3-3-5) 而第i 边的坐标增量为ii i T S x ˆcos ˆˆ=∆ (3-3-6)式中iS i i v S S +=ˆii i j i i j i j i T v i T v i v T i T T j j j +=⋅±++=⋅±++=⋅±+=10111010][180][][180][180]ˆ[ˆββββββ其中T i 是第i 边的近似坐标方位角180][01⋅±+=i T T ij i β(3-3-7)则(3-3-6)式可表示为)]cos([)(ˆ1i iS i i T v v S x j i ++=∆β上式按泰勒级数展开,取至一次项,得ii S i i i j i v y v T x x1][cos ˆβρ''∆-⋅+∆=∆其中ii iT S x cos =∆,为由观测值计算出的近似坐标增量。
平差课程设计导线网一、课程目标知识目标:1. 让学生掌握导线网的基本概念,理解其在测量平差中的应用。
2. 学会计算导线网的闭合差、各边长及各角度的改正数,掌握相应的计算公式。
3. 掌握根据导线网计算结果进行精度分析和评定的方法。
技能目标:1. 能够运用所学知识解决实际测量中的导线网问题,具备一定的实践操作能力。
2. 能够独立完成导线网闭合差的计算,熟练运用计算工具进行数据处理。
3. 能够对导线网计算结果进行合理的分析,提出改进措施。
情感态度价值观目标:1. 培养学生对测量平差学科的兴趣,激发他们主动学习的热情。
2. 增强学生的团队合作意识,培养他们在解决问题时相互协作、共同进步的精神。
3. 培养学生严谨的科学态度,使他们认识到测量精度对实际工程的重要性。
课程性质:本课程为测量平差学科的基础课程,以理论教学为主,实践操作为辅。
学生特点:学生已具备一定的测量学基础知识,具有较强的逻辑思维能力和学习兴趣。
教学要求:结合学生特点和课程性质,注重理论与实践相结合,提高学生的实际操作能力。
通过本课程的学习,使学生能够掌握导线网的相关知识,为后续专业课程打下坚实基础。
教学过程中,将目标分解为具体的学习成果,便于教学设计和评估。
二、教学内容1. 导线网基本概念:介绍导线网的定义、分类及其在测量中的应用。
- 教材章节:第二章第二节- 内容列举:导线网的定义、平面导线网、高程导线网等。
2. 导线网闭合差计算:讲解导线网闭合差的计算方法,推导相关公式。
- 教材章节:第二章第三节- 内容列举:闭合差定义、闭合差计算公式、各边长和角度改正数的计算。
3. 导线网精度分析:分析导线网的精度,探讨影响精度的因素及改进措施。
- 教材章节:第二章第四节- 内容列举:精度评定方法、误差来源分析、提高精度的措施。
4. 导线网实践操作:组织学生进行导线网实践操作,巩固理论知识。
- 教材章节:第二章第五节- 内容列举:实践操作步骤、仪器使用、数据处理与分析。
设计二:导线网平差程序的设计与实现一、设计目的立足于《数据结构与测绘软件开发》这一课程的课堂教学及其实验课程设计,为着实提高学生基于计算机辅助的方式切实解决工程实际问题的动手能力,通过本实习,一方面,使学生深入了解课堂所学知识,另一方面,通过实践掌握测绘行业软件设计与开发的基本方法,深刻掌握矩阵运算、曲线/曲面拟合的数值解法,掌握不同类型的典型测绘软件设计方法,使得学生初步具备编写测绘软件常用算法的能力以及开发中小规模测绘专业软件的能力。
有导线网如图,观测了14条边长和16个转折角,已知测角精度βδ'',测边精度为 1.0()()S S m mm δ=。
已知A 、B 、C 、D 、E 、F 点的坐标(无误差),如下表:点号 X(m) Y(m)A 5256.953 4520.068B 5163.752 4281.277C 3659.371 3621.210D 4119.879 3891.607E 4581.150 5345.292F 4851.5545316.953编号 角度观测值(° ′ ″) 编号 角度观测值(° ′ ″)1 163 45 04 9 169 10 302 64 58 37 10 98 22 043 250 18 11 11 94 53 50 4 103 57 34 12 111 14 235 83 08 05 13 79 20 186 258 54 18 14 268 06 047 249 13 17 15 180 41 18 8 207 32 34 16103 23 08编号边长观测值(m ) 编号边长观测值(m )三、关键问题描述3.1 未知点近似坐标计算平面控制网进行平差计算时需要计算未知点的近似坐标 1.坐标计算公式1、2点的坐标已知,并观测了1-2、1-3的夹角,根据这些数据可以求出3号点坐标 根据1、2两点的坐标,可以反算出1、2方向的方位角T12,3号点的坐标为⎩⎨⎧++=++=)sin()cos(121313121313ααT S y y T S x x式子中S13为观测边长,α为观测角度 2.计算流程从读入的数据循环计算未知点的坐标,已计算出的坐标当做已知坐标的点处理参加下次计算,以此类推,逐步计算出未知点的坐标 3.实现算法CMatrix CPlaneNetAdjust::XYJS() { CMatrix _XYJS(Pnumber,2); double T12; for(int i=0;i<Tnumber;i++) { int k1=cezhan[i]; double x1=xy[k1].X; double y1=xy[k1].Y; if(x1=0) { continue; } int k2=huoshi[i]; int k3=qianshi[i]; if(xy[k2].X>0&&xy[k2].Y>0) { T12=GetT12(k1,k2); } double s12=Gets12(k1,k2); double s13=Gets12(k1,k3); double T13=T12+guancejiao[i].Guancezhi; double dx=s13*cos(T13); double dy=s13*sin(T13); xy[k3].X=xy[k1].X+dx; xy[k3].Y=xy[k1].Y+dy; } for(int i=0;i<Pnumber;i++) { double temp1=xy[i].X; double temp2=xy[i].Y; _XYJS.setValue(i,0,temp1); _XYJS.setValue(i,1,temp2);}return _XYJS;}3.2 误差方程列立1.理论分析平面控制网的误差方程都是非线性方程,必须引入参数近似值将误差方程线性化,取Xˆ的充分近似值 0X ,x ˆ是微小量,在按台劳公式展开时可以略去二次和二次以上的项,而只取至一次项,于是可对非线性平差值观测方程式线性化,于是有如下的式子 对于观测角的改正数有对于边长观测值的改正数有2.实现算法如下:CMatrix CPlaneNetAdjust::B() { CMatrix _B1(Lnumber,Pnumber*2); double a; double b; double c; double d; double m; double n; double m1; double n1; for(int i=0;i<Snumber;i++) { int k1=start[i]; int k2=end[i]; double dx=xy[k2].X-xy[k1].X; double dy=xy[k2].Y-xy[k1].Y; a=-dx/Gets12(k1,k2); b=-dy/Gets12(k1,k2); if(k1<knPnumber) {D A D A D B D B DADB X X Y Y X X Y Y L ˆˆarctan ˆˆarctan ˆˆˆ1-----=-=αα()()22ˆˆS AD A D Y Y X X -+-=kjkjk k jk jk j jk jkj jk jk jk y S Y x S Y y S X x S Y ˆ)(ˆ)(ˆ)(ˆ)(ˆ200200200200"∆⋅+∆⋅-∆⋅-∆⋅+=ρρρραδh jhjh h jh jh j jh jh j jh jh jh y S Y x S Y y S X x S Y ˆ)(ˆ)(ˆ)(ˆ)(ˆ200200200200"∆⋅+∆⋅-∆⋅-∆⋅+=ρρρραδ)(ˆ)("ˆ)("ˆ)("ˆ)("ˆ)("ˆ)("ˆ)("ˆ)("00200200200200200200200200i jk jh h jh jhh jh jh j jh jh j jh jh k jk jkk jk jk j jk jk j jk jk i L y S X x S Y y S X x S Y y S X x S Y y S X x S Y v ---⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧∆+∆-∆-∆-⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧∆+∆-∆-∆-=ααρρρρρρρρi k jkjkk jk jk j jk jk j jk jk i l y S Y x S X y S Y x S X v -∆+∆+∆-∆-=ˆˆˆˆ000000000jki i S L l -=2002000)()(j k j k jk Y Y X X S -+-=_B1.setValue(i,2*k1,0);_B1.setValue(i,2*k1+1,0);}else{_B1.setValue(i,2*k1,a);_B1.setValue(i,2*k1+1,b);}if(k2<knPnumber){_B1.setValue(i,2*k2,0);_B1.setValue(i,2*k2+1,0);}else{_B1.setValue(i,2*k2,-a);_B1.setValue(i,2*k2+1,-b);}}for(int i=0;i<Tnumber;i++){const double p=206.265;int k1=cezhan[i];int k3=huoshi[i];int k2=qianshi[i];double dx12=xy[k2].X-xy[k1].X;double dy12=xy[k2].Y-xy[k1].Y;double dx13=xy[k3].X-xy[k1].X;double dy13=xy[k3].Y-xy[k1].Y;c=(p*dx13/Gets12(k1,k3)/Gets12(k1,k3)-p*dx12/Gets12(k1,k2)/Gets12(k1,k2));c=-c;d=-p*dy13/Gets12(k1,k3)/Gets12(k1,k3)+p*dy12/Gets12(k1,k2)/Gets12(k1,k2);d=-d;m=-p*dy13/Gets12(k1,k3)/Gets12(k1,k3);m=-m;n=p*dx13/Gets12(k1,k3)/Gets12(k1,k3);n=-n;m1=p*dy12/Gets12(k1,k2)/Gets12(k1,k2);m1=-m1;n1=-p*dx12/Gets12(k1,k2)/Gets12(k1,k2);n1=-n1;if(k1<knPnumber){_B1.setValue(i+Snumber,2*k1,0);_B1.setValue(i+Snumber,2*k1+1,0);}else if(k1>=knPnumber){_B1.setValue(i+Snumber,2*k1,c);_B1.setValue(i+Snumber,2*k1+1,d);}if(k2<knPnumber){_B1.setValue(i+Snumber,2*k2,0);_B1.setValue(i+Snumber,2*k2+1,0);}else if(k2>=knPnumber){ _B1.setValue(i+Snumber,2*k2,m1); _B1.setValue(i+Snumber,2*k2+1,n1); } if(k3<knPnumber) { _B1.setValue(i+Snumber,2*k3,0); _B1.setValue(i+Snumber,2*k3+1,0); } else if(k3>=knPnumber) { _B1.setValue(i+Snumber,2*k3,m); _B1.setValue(i+Snumber,2*k3+1,n); } }CMatrix _B(Lnumber,2*(Pnumber-knPnumber)); for(int i=0;i<_B1.getRow();i++) { for(int j=2*knPnumber;j<2*Pnumber;j++) { double temp=_B1.getV alue(i,j); _B.setValue(i,(j-2*knPnumber),temp); } }return _B;}3.3 法方程构建与解算1.理论分析 误差方程系数 构成法方程2.实现代码 ①计算LCMatrix CPlaneNetAdjust::L() { CMatrix _L(Lnumber,1); double l; double s; double s0; for(int i=0;i<Snumber;i++) { int k1=start[i]; int k2=end[i]; s=Gets12(k1,k2); double dx=xy[k2].X-xy[k1].X; double dy=xy[k2].Y-xy[k1].Y; s0=sqrt(dx*dx+dy*dy); l=s-s0; _L.setValue(i,0,l*1000); //cout<<l<<endl; } for(int i=0;i<Tnumber;i++) { const double pi=2*3.1415926; double A12;l x B V -=ˆ0ˆ=-Pl B x PB B TTmin =PV V T V L L +=ˆ20σ20ˆσPV V T double A13; double A;int k1=cezhan[i]; int k2=huoshi[i]; int k3=qianshi[i]; A12=GetT12(k1,k2); A13=GetT12(k1,k3); A=GetA(k1,k2,k3); l=A13-A12; if(l<0) { l=pi+l; }if(l>=pi) { l=l-pi; }l=l-A;//cout<<rad_dms(A12)<<" "<<rad_dms(A13)<<" "<<rad_dms(A)<<""<<rad_dms(l)<<endl;_L.setValue(i+Snumber,0,rad_dms(l));} return _L; }②计算权阵PCMatrix CPlaneNetAdjust::P() { CMatrix _P(Lnumber,Lnumber); for(int i=0;i<Snumber;i++) { doubletemp=temp=Cjwucha*Cjwucha/(1*sqrt(bianchang[i].Len))/(1*sqrt(bianchang[i].Len)); _P.setValue(i,i,temp); } for(int i=Snumber;i<Lnumber;i++) { _P.setValue(i,i,Cjwucha*Cjwucha/(Cjwucha*Cjwucha)); } return _P; }3.4 精度估计1.单位权中误差间接平差与条件平差虽采用了不同的函数模型,但它们是在相同的最小乘原理下进行的,所以两法的平差结果总是相等的,这是因为在满足 条件下的V 是唯一确定的,故平差值 不因方法不同而异。
导线网平差程序设计报告1. 引言在工程测量中,导线网平差是一项重要的任务,其目的是通过测量数据的处理,求取已测量量的最优估计值,并得出测量结果的可信度。
导线网平差程序设计是实现这个过程的关键步骤之一。
本报告将介绍导线网平差程序的设计过程,并详细说明设计的原理、算法和实现细节。
2. 设计原理导线网平差程序的设计原理基于最小二乘法。
最小二乘法是一种通过最小化观测结果与理论模型的残差平方和来估计模型参数的数学方法。
在导线网平差中,我们可以将每个观测值看作是理论值与测量误差的和,以此建立观测方程。
通过最小二乘法,可以求解出观测量的最优估计值。
3. 算法设计3.1. 数据输入导线网平差程序首先需要获取测量数据。
这些数据可能包括导线的起始点和终止点坐标、导线的观测距离和导线的观测方向等。
程序需要能够读取这些数据,并将其存储在内存中以供后续处理。
3.2. 创建观测方程根据测量数据,程序需要创建观测方程。
观测方程可以使用矩阵形式表示,其中每个元素对应一个测量值。
观测方程的建立需要依据测量理论和导线网的具体结构。
3.3. 计算平差数值解通过最小二乘法,可以计算出导线网平差的数值解。
数值解是观测量的最优估计值,可以考虑加权或限制条件等问题。
3.4. 计算平差结果通过平差数值解,可以计算出每个测量值的平差结果。
这些结果可以包括平差坐标、观测误差、精度估计等。
3.5. 输出结果最后,程序需要将平差结果输出到文件或打印屏幕上,以便用户查看和使用。
4. 实现细节为了设计一个高效且易于使用的导线网平差程序,我们可以选择使用编程语言来实现。
常见的编程语言有Python、C++等。
在程序实现过程中,我们可以使用一些常用的库和工具来简化开发过程,例如NumPy和SciPy用于矩阵计算,matplotlib用于结果可视化等。
在实现中,我们需要设计合适的数据结构来存储测量数据和计算结果,例如使用数组、矩阵或自定义的数据结构。
5. 结论导线网平差程序的设计是一个复杂而重要的任务。
导线平差1. 导线平差概述导线平差是测量工程中的一项重要工作,用于对已测得的导线长度和方位角进行误差修正,以提高测量结果的精度和准确性。
导线平差主要包括闭合导线平差和杆线平差两种方法。
闭合导线平差是指在一个闭合导线网中,根据导线观测数据进行误差修正的过程,以确保闭合导线的起点和终点高程相等。
杆线平差是指对于一个单独的导线杆上的水平角进行误差修正的过程,以确保杆线测量结果的精度。
本文将对闭合导线平差和杆线平差的原理和方法进行介绍,并通过示例进行详细解析。
2. 闭合导线平差闭合导线平差是导线测量中常用的一种平差方法,主要用于解决闭合导线的高程差和角度残差问题。
闭合导线平差的基本原理是通过对闭合导线的测量数据进行计算和修正,使闭合导线的起点和终点高程相等,同时保证角度观测值的准确性。
闭合导线平差的步骤包括: - 观测数据处理,包括导线长度观测值和角度观测值的计算。
- 初始近似计算,根据观测数据计算初始的导线长度和方位角。
- 误差修正,根据观测数据和初始计算结果,进行误差修正计算,得到最终的导线长度和方位角。
- 残差分析,对平差结果进行残差分析,评估平差结果的精度。
闭合导线平差的核心思想是通过误差修正计算,不断逼近真实的导线长度和方位角,从而提高闭合导线测量结果的精度和准确性。
3. 杆线平差与闭合导线平差不同,杆线平差是针对单独的导线杆上的水平角进行误差修正的方法。
在导线测量中,常常需要在导线杆上测量角度值,以确定导线的方向和倾斜情况。
杆线平差的基本原理是通过对导线杆的角度观测值进行计算和修正,从而得到准确的导线方向和倾斜角度。
杆线平差的步骤包括: - 观测数据处理,包括导线杆上角度观测值的计算。
- 初始近似计算,根据观测数据计算初始的导线方向和倾斜角度。
- 误差修正,根据观测数据和初始计算结果,进行误差修正计算,得到最终的导线方向和倾斜角度。
- 残差分析,对平差结果进行残差分析,评估平差结果的精度。
导线网平差及精度评定程序设计平差
问题描述
背景:导线网平差及精度评定程序设计平差是在测量和测绘工
作中常用的一种技术方法。
它是通过对导线网观测数据进行处理和
计算,得出导线网的平差结果,并评定其精度,以确保测量结果的
准确性和可靠性。
背景:导线网平差及精度评定程序设计平差是在
测量和测绘工作中常用的一种技术方法。
它是通过对导线网观测数
据进行处理和计算,得出导线网的平差结果,并评定其精度,以确
保测量结果的准确性和可靠性。
目的:本文档旨在介绍导线网平差及精度评定程序设计平差的
背景和目的。
通过对平差方法和流程的解释,使读者了解导线网平
差的基本原理和操作步骤,并了解如何评定导线网平差结果的精度。
这将有助于测量和测绘工作中平差的正确实施,并对测量数据进行
科学的分析和解释。
目的:本文档旨在介绍导线网平差及精度评定
程序设计平差的背景和目的。
通过对平差方法和流程的解释,使读
者了解导线网平差的基本原理和操作步骤,并了解如何评定导线网
平差结果的精度。
这将有助于测量和测绘工作中平差的正确实施,
并对测量数据进行科学的分析和解释。
目的:本文档旨在介绍导线
网平差及精度评定程序设计平差的背景和目的。
通过对平差方法和
流程的解释,使读者了解导线网平差的基本原理和操作步骤,并了
解如何评定导线网平差结果的精度。
这将有助于测量和测绘工作中
平差的正确实施,并对测量数据进行科学的分析和解释。
目的:本
文档旨在介绍导线网平差及精度评定程序设计平差的背景和目的。
通过对平差方法和流程的解释,使读者了解导线网平差的基本原理
和操作步骤,并了解如何评定导线网平差结果的精度。
这将有助于
测量和测绘工作中平差的正确实施,并对测量数据进行科学的分析
和解释。
请注意:本文档仅供参考和研究使用,不可用于商业目的或作
为法律依据。
建议在实际应用中,根据具体情况和专业要求,进行
适当的调整和改进。
请注意:本文档仅供参考和研究使用,不可用
于商业目的或作为法律依据。
建议在实际应用中,根据具体情况和
专业要求,进行适当的调整和改进。
请注意:本文档仅供参考和研
究使用,不可用于商业目的或作为法律依据。
建议在实际应用中,
根据具体情况和专业要求,进行适当的调整和改进。
请注意:本文
档仅供参考和研究使用,不可用于商业目的或作为法律依据。
建议
在实际应用中,根据具体情况和专业要求,进行适当的调整和改进。
本文讨论导线网平差程序的设计步骤和方法,包括数据准备、观测值处理、计算过程、平差结
果等。
数据准备
收集所需的导线网观测数据。
对观测数据进行检查和清理,确保数据的准确性和完整性。
观测值处理
进行观测数据的预处理,如数据平滑和插值等。
根据导线网的拓扑关系,建立观测方程。
计算过程
利用最小二乘法进行导线网的平差计算。
根据平差结果,验证观测方程的准确性。
平差结果
得到导线网的平差结果,包括各测点的坐标、导线的长度和角
度等。
对平差结果进行精度评定,评估导线网的精度和可靠性。
以上是《导线网平差及精度评定程序设计平差》的内容大纲。
请注意,本回答是根据提供的大纲进行扩写,不含实际内容,
且不做确认的引用。
)*
说明如何设计导线网的精度评定程序,包括
测量精度评定参数的选择以及精度评定结果的分析和报告。
导线网的精度评定程序设计是为了评估测量结果的可靠性,并
确定其误差范围。
下面是一个简单的程序设计流程:
选择评定参数
根据测量要求和导线网的特点选择评定参数,如平差观测值的
数量、观测方向的选择、导线网结构的复杂程度等。
还要考虑评定参数对测量精度评定结果的敏感性,选择合适的
参数以确保评定结果的准确性。
进行平差观测
根据导线网的设计进行平差观测,确保测量数据的准确性和完
整性。
平差观测可以使用常见的平差方法,如最小二乘法、最小二乘
逆推法等。
计算导线网精度指标
根据选择的评定参数和平差观测数据,计算导线网的精度指标,如单位权中误差、精密度比值、等级关系误差等。
这些指标可以用来评估导线网的测量精度,提供对测量结果误差的量化描述。
分析评定结果
分析导线网的精度评定结果,确定其测量误差范围。
对评定结果进行统计分析,可以发现系统性误差和个别异常观测值,帮助改进测量方法和提高测量精度。
编制精度评定报告
根据精度评定结果,编制精度评定报告,详细描述测量过程和评定结果。
报告中还可以包括导线网的技术要求、数据处理方法和评定结果的解释,以便其他人可以理解和验证测量结果。
这个程序设计流程可以帮助设计导线网的精度评定程序,并提供合理而可靠的测量结果。
根据实际情况和具体要求,程序中的步骤和参数可以进行调整和修改。
这个程序设计流程可以帮助设计导线网的精度评定程序,并提供合理而可靠的测量结果。
根据实际情况和具体要求,程序中的步骤和参数可以进行调整和修改。