六轴混合机器人在激光喷丸中的应用
- 格式:doc
- 大小:9.11 KB
- 文档页数:2
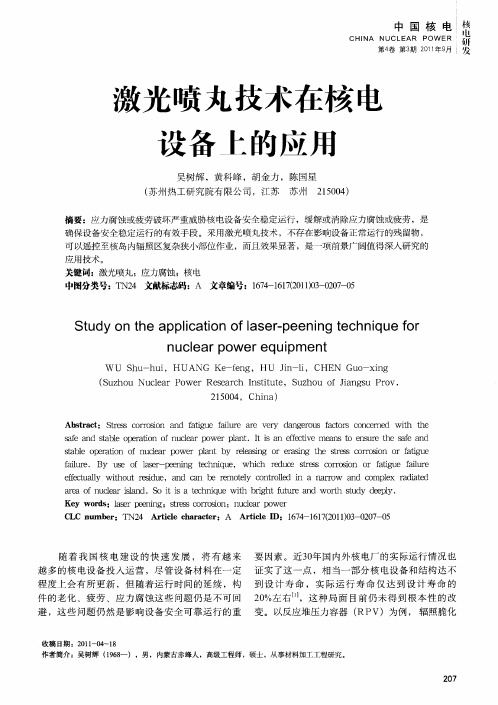
1.1激光热应力成形激光热应力成形是日本学者Y.Namba在1985年研究材料温度分布和热变形时提出的一种激光成形工艺,其基本成形原理如图1.5所示,激光束扫描金属薄板时,被照射区域瞬间被加热至高温状态,从而在加热区的板厚方向上形成了对空间和时间梯度都很大的不均匀温度场,加上周围冷态材料的约束,使得该温度场所诱发的热应力超过了随温度变化的屈服极限,从而使板料产生了热塑性变形。
通过调整激光加工参数和选择合适的扫描轨迹就能够成形任意的弯曲件和锥形件等三维曲面零件,因而激光热应力成形实现了无模成形。
最近二十年里,激光热应力成形技术的研究工作取得的巨大的进步。
波兰科学院技术研究所的H.Frackiewicz,自1988年起,利用激光热应力成形已先后制造出了筒形件、球形件、波纹管等,其研究成果已在美国,日本,欧共体申请了技术专利。
德国学者M.Geiger等将激光热应力成形与其它加工工序复合应用于汽车制造业,进行了汽车覆盖件的柔性校平和其他成形件的成形。
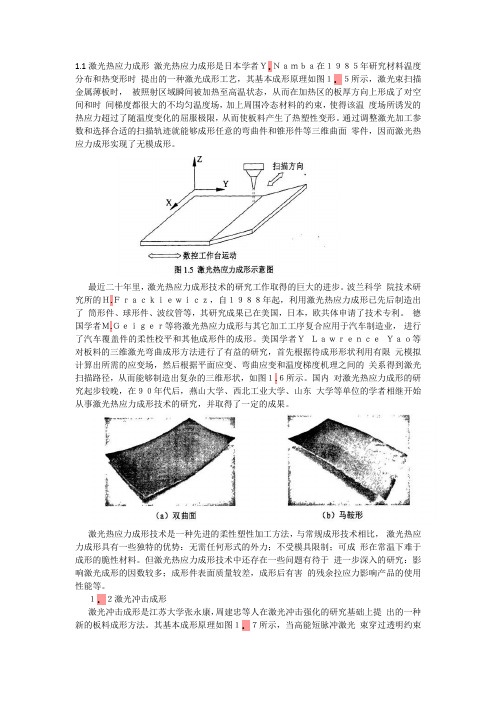
美国学者YLawrenceYao等对板料的三维激光弯曲成形方法进行了有益的研究,首先根据待成形形状利用有限元模拟计算出所需的应变场,然后根据平面应变、弯曲应变和温度梯度机理之间的关系得到激光扫描路径,从而能够制造出复杂的三维形状,如图1.6所示。
国内对激光热应力成形的研究起步较晚,在90年代后,燕山大学、西北工业大学、山东大学等单位的学者相继开始从事激光热应力成形技术的研究,并取得了一定的成果。
激光热应力成形技术是一种先进的柔性塑性加工方法,与常规成形技术相比,激光热应力成形具有一些独特的优势:无需任何形式的外力;不受模具限制;可成形在常温下难于成形的脆性材料。
但激光热应力成形技术中还存在一些问题有待于进一步深入的研究:影响激光成形的因数较多;成形件表面质量较差,成形后有害的残余拉应力影响产品的使用性能等。
1.2激光冲击成形激光冲击成形是江苏大学张永康,周建忠等人在激光冲击强化的研究基础上提出的一种新的板料成形方法。


现代表面技术研究与应用编者按 随着激光器制造技术的成熟及商业应用,激光加工技术越来越受人们的重视。
激光喷丸技术是一项新型加工工艺技术,国外已开始工程化应用,本刊特编辑推荐此文,以伺读者。
激光喷丸技术及其应用*江苏大学机械工程学院(212013) 倪敏雄 周建忠 杜建钧 曹向广【摘要】随着激光技术的发展,高能激光和材料相互作用产生的高幅冲击波技术已得到了广泛研究。
激光喷丸技术就是利用强脉冲激光诱导产生的高能冲击波在金属材料表面改性和成形方面的一个应用。
介绍了激光喷丸强化和激光喷丸成形的机理、特点和工业应用,并对应用前景作了分析。
关键词 激光冲击波 激光喷丸 表面改性 板料成形Laser Peening Technology and ApplicationsAbstract W ith the development of laser techno lo gy,laser-induced high amplitude shock w ave has beenw idely studied.L aser peening technique is an applicat ion in the fields of sur face modification o f metal and metalfo rming w ith laser sho ck wav es.T his paper induces pro cessing mechanism,technique characterist ics and in-dustrial application of laser sho ck peening and laser peening fo rming.A lso,the practical pr ospect is analy zed. Keywords laser-induced sho ck w ave,laser peening,surface modification,sheet met al fo rming中图分类号:T N249 文献标识码:A在实际应用中,很多金属零件会发生弯曲变形。

6关节机器人介绍剖析六关节机器人,也称为六轴机器人,是一种具有六个自由度的机器人系统。
每个关节都能够进行旋转,这使得机器人能够在三维空间中执行各种复杂的任务和动作。
下面我将对六关节机器人的结构、工作原理、应用领域以及优势进行介绍和剖析。
六关节机器人的结构主要由六个旋转关节组成,每个关节由电机驱动,通过齿轮传动或者其他传动方式将旋转运动传递到机械臂的末端。
这种结构使得机器人能够沿着不同的轴进行灵活的运动,实现各种复杂的动作。
同时,机器人的末端还可以配备各种工具或器械,从而可以在不同的领域中执行不同的任务。
六关节机器人的工作原理主要是通过控制每个关节的旋转角度,从而实现机械臂的整体运动。
通常采用的控制方式有PID控制、模糊控制、神经网络控制等。
通过计算机的精确控制,可以使机器人按照预先设定的路径或者姿态完成任务。
六关节机器人在各个领域都有广泛的应用。
在制造业中,它们可以完成各种组装、装卸、搬运、焊接等工作。
在医疗领域,它们可以辅助进行手术操作、康复训练等。
在军事领域,它们可以用于侦查、拆弹、装甲车维修等任务。
此外,它们还可以应用于航空航天、矿山、化工、食品加工等行业,为人们提供更安全、高效、精确的服务。
六关节机器人相比其他机器人系统具有一些独特的优势。
首先,六关节机器人具有较大的工作范围和灵活性,能够执行复杂的动作和路径规划。
其次,这种机器人的运动轨迹较为精准,可以实现高精度的定位和操作。
此外,六关节机器人在力矩和负载方面也具有较大的承载能力,可以应对不同的工作环境和工作负荷。
然而,六关节机器人也存在一些挑战和不足之处。
首先,它们通常需要较大的空间,并且布置和配置相对较为复杂。
其次,其运动控制需要较高的控制精度和计算能力,对控制系统提出了较高的要求。
此外,由于六关节机器人的结构较为复杂,对维护和保养也提出了较高的要求。
综上所述,六关节机器人是一种具有六个自由度的机器人系统,由六个旋转关节组成。
它们在制造业、医疗、军事等领域具有广泛的应用。

激光喷丸残余应力
激光喷丸技术是一种常见的表面处理方法,它可以通过高能激光束对金属等材料表面进行打孔、刻划、切割等加工,并且能够控制残余应力的产生,通过改变激光参数等手段来实现精确的表面处理。
在本文中,我们将深入探讨激光喷丸技术中残余应力的产生与控制。
一、激光喷丸技术中残余应力产生的原因
1.加工时产生的热应力:激光喷丸技术在加工过程中会产生高能的激光束,从而在材料表面形成高温区域,当高温区域迅速冷却时,由于材料热膨胀系数的不同,会导致材料表面发生形变,从而产生残余应力。
2.材料组织结构变化:激光喷丸技术在加工过程中会对材料表面产生巨大的冲击力,从而改变了材料表面的组织结构,导致残余应力的产生。
二、激光喷丸技术中残余应力的控制方法
1.选择合适的激光参数:合适的激光参数可以控制激光束的功率、扫描速度等因素,从而控制残余应力的产生。
2.优化喷丸工艺:通过优化激光喷丸工艺,如改变喷丸次数、喷丸深度等因素,可以有效地减轻或者消除残余应力。
3.进行后续处理:在激光喷丸工艺完成后,还可以进行后续的表面处理,如二次退火、表面机械加工等方法,从而有效地减少或者消除残余应力。
三、激光喷丸技术中残余应力的应用
1.制备高精度器件:残余应力可以使得材料表面形成一定的应力场,
从而实现高精度的表面加工。
2.改善材料力学性能:适当的残余应力可以使得材料表面形成压缩应力,从而改善材料的强度、韧性等力学性能。
总之,激光喷丸技术在表面加工领域具有广泛应用价值,通过控制残
余应力的产生,可以有效地改善材料的力学性能以及制备高精度器件。
激光喷丸强化疲劳寿命的有限元分析作者:严俐婉严炳泉来源:《中小企业管理与科技·上旬刊》2018年第05期【摘要】激光喷丸强化(Laser shot peening,简称LSP)通过强激光诱导的冲击波在金属材料表层引入残余压应力,从而抑制疲劳裂纹的萌生和扩展,是一种新型的金属表面强化技术。
论文采用数值模拟方法对镁合金激光喷丸强化后的疲劳寿命进行了研究。
基于ABAQUS 和Fatigue两款软件,研究激光喷丸强化中关键参数对ZK60镁合金的疲劳寿命的影响,包括激光功率密度,激光光斑直径和激光喷丸次数的影响。
【Abstract】 Laser shot peening (LSP) is a new type of metal surface strengthening technique, which induces residual compressive stress on the surface of metal material by the shock wave induced by intense laser, which can inhibit the initiation and propagation of the fatigue crack. In this paper, the fatigue life of magnesium alloy strengthened by laser shot peening was studied by numerical simulation method. Based on the softwares of ABAQUS and Fatigue, the effects of key parameters in laser shot peening on the fatigue life of ZK60 magnesium alloy were studied,including the laser power density, laser spot diameter and laser shot peening times.【关键词】激光喷丸强化;镁合金;疲劳寿命;有限元分析【Keywords】 laser shot peening; magnesium alloy; fatigue life;finite element analysis【中图分类号】TN249 【文献标志码】A 【文章编号】1673-1069(2018)05-0159-061 引言激光喷丸强化技术(Laser Shot Peening,简称LSP)是一种利用强激光诱导冲击波来强化金属表面的新型材料表面改性技术,以延长零件使用的疲劳寿命。
六轴机器人最新研究报告
根据近期的研究报告,六轴机器人在工业和服务领域的应用正不断增加。
以下是一些最新的研究发现:
1. 姿态控制:研究人员提出了一种新的姿态控制方法,利用六轴机器人的传感器数据和先进的控制算法,实现更精确和稳定的姿态控制。
这项研究对于机器人在高精度操作和灵活性要求较高的任务中的应用具有重要意义。
2. 动力学建模:研究人员开发了一种新的动力学模型,通过对六轴机器人的力学特性进行建模,能够更准确地预测其运动和力学响应。
这对于设计更高性能和更智能的控制算法具有重要意义。
3. 协同控制:研究人员提出了一种新的协同控制方法,通过六轴机器人之间的通信和协作,实现更高效和灵活的工作。
这种方法在装配线等任务中能够显著提高生产效率和工作质量。
4. 自主学习:研究人员利用机器学习技术,开发了一种自主学习算法,使六轴机器人能够通过自我试错和经验积累的方式,不断改进其控制策略和任务执行能力。
这项研究对于实现真正智能化的机器人具有重要意义。
5. 应用领域扩展:除了传统的工业应用,六轴机器人在医疗、农业、教育和家庭服务等领域的应用也在不断扩大。
例如,在医疗领域,六轴机器人被用于手术操作和康复治疗等任务中,能够提高手术准确性和康复效果。
总体而言,六轴机器人的研究重点在于提高其控制精度、灵活性和智能化水平,以适应不断变化和复杂的任务需求。
未来,随着技术的进一步发展,六轴机器人有望在更广泛的领域发挥重要作用。
六自由度并联简介六自由度并联简介1. 引言本文旨在介绍六自由度并联的基本概念、结构设计、运动学和动力学分析等内容。
六自由度并联是一种能够实现六个自由度运动的系统,具有广泛的应用领域,包括工业制造、医疗手术、半导体加工等。
2. 结构设计2.1 结构概述六自由度并联由基座、运动平台和连杆组成。
基座固定在地面上,运动平台通过多个连杆与基座相连,形成六个自由度。
运动平台上还装配有执行器和传感器等设备,用于控制和监测的运动状态。
2.2 连杆设计连杆是连接基座和运动平台的关键部件,其长度和形状对的运动性能有重要影响。
连杆的设计需要考虑运动范围、负载能力和结构强度等因素。
2.3执行器和传感器执行器用于驱动的运动,常见的执行器包括电机和液压缸等。
传感器用于监测的位置、力量和反馈信息,以实现自适应控制和安全保护。
3. 运动学分析3.1 坐标系建立建立的基座坐标系和运动平台坐标系,用于描述的位置和姿态。
3.2 正运动学通过正运动学方程,计算出给定关节变量下的末端位置和姿态。
正运动学方程是解决逆运动学问题的基础。
3.3 逆运动学逆运动学问题是指已知的末端位置和姿态,求解对应的关节变量。
采用数值方法或解析法求解逆运动学问题,以实现精确控制。
4. 动力学分析4.1 质心和惯性参数确定各部件的质量分布和惯性参数,建立动力学模型。
4.2 动力学方程建立的动力学方程,描述在给定控制力和力矩下的运动规律。
动力学方程求解可以实现的动态控制和冲击响应分析。
5. 应用领域6自由度并联在工业制造、医疗手术、半导体加工等领域具有广泛的应用。
通过灵活的运动和高精度的控制,该能够完成复杂的工作任务,并提高生产效率和产品质量。
6. 结束语本文对六自由度并联的结构设计、运动学和动力学分析进行了详细介绍。
希望通过本文的阅读,读者能够对该系统有更深入的了解。
1.本文档涉及附件:本文档附有六自由度并联的结构图、运动学和动力学分析的数学模型和各部件的技术参数表格等。
六轴混合机器人在激光喷丸中的应用
一、引言激光喷丸可以用来增加零件的强度及消除应力,主要用于航空发动机叶轮等。
通常喷丸要对整个物体的龙阔进行,也有对整个面进行喷丸。
对单个发动机叶片类零件的喷丸相当比较简单。
但对整个叶轮的每个叶片都进行喷丸时就比较难,激光的发射角固定,而要对叶轮进行转动和位移来确保激光能打在叶片表面理想位置。
为了对每个叶片的主要部位都能进行喷丸处理,就要求对整体叶轮进行复杂的运动。
通常至少是对其进行五轴五联动运动,最好是六轴六连动运动,这样才能实现无遮挡的理想喷丸。
为了满足上面的喷丸要求,沈阳莱茵机器人有限公司开发了两台五轴五联动机器人和一系列六自由度混合型机器人。
我们采用了高档,开放式六轴多通道控制系统。
几台五轴五联动机器人系统已经连续可靠运行了三年,六自由度混合型机器人运行也非常平稳,可靠。
本文简单介绍五轴连动机器人和六轴连动机器人。
二、五轴连动机器人根据用户对机器人强度高,负载大,运动精度高等要求及人工装卸零件的方便性和光路要求,我们设计了两款五轴连动机器人。
它们的结构原理上相同,主要由一个龙门式三轴直角坐标机器人和两个转动轴组成。
由于负载重,直角坐标机器人的Z轴采用了的双Z轴滚珠丝杆同步驱动。
直角坐标机器人的三个直线运动轴除了采用防尘防水的钢带防护,里面的全部零件都不怕水,能保证机器人长期工作。
图3中的机器人是莱茵机电三年前交付给用户,运回维护保养的五轴联动机器人。
图1是由一个典型的3D悬臂直角坐标机器人和关节机器人的三个末端关节组成的混合型六自由度机器人。
图2是要马上发货的五轴连动机器人。
图3是无故障工作了三年,回厂保养的五轴联动机器人。
五轴联动机器人的第四个轴是安装在Z轴下端,以Z轴为轴心的转动轴,叫A轴。
A轴主要由高精度交流伺服和反向间隙小于0.5弧分的紧密减速机组成。
A 轴带动转动轴B以水平面为轴转动。
B轴也主要由高精度交流伺服和反向间隙小于0.5弧分的紧密减速机组成。
三、五轴联动机器人的控制系统及电箱由于五轴联动机器人的Z轴采用双Z轴滚珠丝杆同步驱动方式,共计采用了6台伺服电机。
我们采用了沈阳莱茵机器人公司自己开发的,基于ARM的嵌入式8轴连动控制系统。
为了双Z轴的严格同步,在FPGA 里面两路伺服电机位置环控制信号由同一路控制信号控制。
,该嵌入式8轴连动控制系统带CAN总线,RS485接口和以太网接口,支持Modbus通信协议。
可以链接常见的触摸屏和工控机。
所有IO口带短路保护及扩展,还可以很方便搭建成主从时式分布式控制系统。
该控制系统是莱茵机器人十多年开发积累的,已在织布机的电送点卷,包装机和火焰切割机上批量连续可靠工作多年的嵌入式系统。
该系统有是一个高度开放的控制系统,可以方便修改,增添功能,及用户自己二次开发。
四、工作过程由于激光束的方向是不能改变的,必须控制被喷丸的工件如此精确平稳运动,确保激光束在要被喷丸处理的区域,按要求的轨迹和顺序喷丸。
为此采用示教方式工作,各个轴间可以同时联动和独立运动。
激光系统可以放出一个几乎没有任何能量的激光点,我们称为参照激光点。
参照激光点的方位与喷丸的激光束完全一样。
示教时,先手动运动使参照激光点照到要被喷丸处理的轨迹上,然后确认该点为有效点。
示教时操作者可以用手动操作器在被喷丸零件边上边看看控制运动。
但出于安全考虑,操作员也可以借助高分辨率高清晰的视频监控系统来控制参照激光点在零件上的位置。
系统自动记录下这些有效点对应机器人各种轴的位置,然后上位机离线自动生产喷丸运动轨迹,自动优化各个轴在各个点的运动分量,使运动过程平稳高速。
可以对喷丸轨迹进行图示,局部放大,优化喷丸顺序,删减等操作。
如果能得到被喷丸零件的3DCAD数据,给出喷丸信息后,借助CAM软件可以自动生成运动轨迹。
但通常出于保密等原因,通常是得不得对应的3DCAD 数据。
五、六轴连动机器人对于复杂的整体叶轮等采用六轴联动机器人会更方便。
图4是混合型六轴联动机器人的结构形式之一,它由三个直线运动轴,两个转动轴和一个摆动轴组成。
其中三个直线运动轴是典型的悬臂型直角坐标机器人,也可以是图2中所以的龙
门式三维直角坐标机器人。
在上下运动的Z轴下端带动一个旋转轴,旋转轴带动一个摆动轴,摆动轴末端再带动一个旋转轴。
最末端的旋转轴带动手爪。
由于两个旋转轴和一个摆动轴其实就是关节机器人的末端三个运动轴,所以六轴混合机器人就是三轴直角坐标机器人加上关节机器人的三个最末端运动轴组合而成。
根据实际应用需要,混合型机器人的直线运动轴也可以是二维的XY轴结构或XZ轴结构,也可以是龙门式结构。
其各个直线运动轴的行程及承载能力可以按要求去做。
而两个转动轴和一个摆动轴组成也可以按需要仅选择一个转动轴,如从生产线把箱体码垛到托盘上,也可以是一个转动轴和一个摆动轴及其他组合。
图4:混合型六轴联动机器人示意图六、六轴联动机器人的控制系统六轴联动数控系统是一个高度开放,功能强大的数控系统。
其控制轴数最多可以达64轴,它可以是单通道数控系统,也可以设置为多通道数控系统。
可以以脉冲方式,总线通信方式和模拟量方式控制运动轴和主轴,强大开放的PLC功能可以按用户要求来配置。
其软件功能非常丰富,包含有几乎任何常见的G代码和M功能。
操作界面人性化及按用户要求来定制。
系统插补周期短,可视化PID调节功能高效简单。
而且还可以扩展增加电子凸轮来实现活塞车等功能特种车铣功能。
主要功能:1)测量功能五轴机床含两个摆动/旋转轴,两个轴的转动中心点坐标及与三个直线轴间的夹角统必须精确获取。
通过测量自动计算出这些数据。
2)刀具中心点控制功能(RCTP)五轴加工中心所用的程序由CAD/CAM软件产生,大多数系统的程序是基于刀具中心点编写的程序。
但当换刀时中心点位置变了,就要重新生成程序,非常不方便。
而基于刀尖中心点编程,即物体表面3D位置(X,Y,Z)和该点的刀尖方向(A,B)的编程就仅与被加工的物体几何尺寸有关,而与刀具长度和机床结构没有关系。
RCTP功能就是把基于物体表面3D位置(X,Y,Z)和该点的刀尖方向(A,B)的程序自动分解成各个轴的运动。
3)该系统可以适合工作台上带有两个旋转轴,或加工刀具上(主轴)带两个摆动轴,或工作台上带有一个旋转轴,而加工刀具上(主轴)带一个摆动轴结构形式的五轴机床。
4)3D刀具补偿功能保证在加工过程中换刀时软件自动计算补偿刀具半经变化带来的轨迹位置变化。
该功能避免了换不同半径的刀具时要重新生成加工程序。
5)倾斜轴功能保证了机床的X,Y 和Z轴间可以是任意角度,而该功能自动换算出编程时相互垂直的X,Y和Z轴。
还可以克服X,Y和Z空装配误差,起到软件补偿功能。
6)该系统包含有多通道多轴控制系统,可以控制特殊复合机床,实现一次装夹多工序全自动加工。
她能使特种复合加工中心及生产线实现高效高精密加工。
七、结论这类六轴联动混合型机器人本质上是来自一些应用需要,综合了直角坐标机器人的关节机器人的优点,具有下面的主要优点:1、极大扩展了工作空间,X轴的工作行程可以达到100米长,Y轴可以达到10米。
2、承载能力更强,特殊结构可达2400Kg。
3、工作精度更高,直角坐标机器人部分可以采用精密滚珠丝杠传动,重复定位精度可达0.01mm,甚至更高。
4、结构形式多样性,直接坐标机器人可以按需要选择龙门式、悬臂式、壁挂式等。
同时可以增减旋转轴和翻转轴,构成五到八自由度机器人。
5、能替代关节机器人,完成打磨倒角,焊接,上下料额码垛搬运等任务。
6、成本低,控制简单,易于维护。
上面是其主要的优点,在打磨倒角,机床上下料,大型零件焊接,码垛搬运等工作中有关节机器人无法比拟的优点。
可以在几乎所有的应用中取代关节机器人。