抑制α稳定噪声的改进常数模盲均衡算法
- 格式:pdf
- 大小:325.43 KB
- 文档页数:5


改进的MIMO系统变步长小波常模盲均衡算法
高亚兰;郭业才;吴珊
【期刊名称】《计算机测量与控制》
【年(卷),期】2014(22)3
【摘要】针对传统的多用户MIMO系统常模盲均衡算法收敛速度慢,稳态误差大的缺点,提出来改进的多用户MIMO系统变步长小波常模盲均衡算法,该算法使用变步长代替固定步长来克服收敛速度与剩余误差之间的矛盾,同时利用归一化正交小波变换(WTCMA)和奇异值分解消除时延信号分量,降低接收信号的自相关性,加快收敛速度,减小稳态误差;理论分析和仿真结果表明:新算法可正确恢复出具有信号延时的MIMO系统的源信号,与变步长小波盲均衡算法与CMA算法相比,能获得更快的收敛速度及更小的均方误差.
【总页数】4页(P807-809,812)
【作者】高亚兰;郭业才;吴珊
【作者单位】安徽理工大学电气与信息工程学院,淮南 232001;南京信息工程大学电子与信息工程学院,南京 210044;安徽理工大学电气与信息工程学院,淮南232001
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于瑞利分布的变步长常模盲均衡算法 [J], 韩迎鸽;郭业才;强云霄
2.基于指数型变步长常模水声信道盲均衡算法及其DSP实现 [J], 赵雪清;郭业才;杜守田
3.基于误差信号非线性函数的变步长常模盲均衡算法 [J], 张满毅
4.一种新的变步长常模盲均衡算法 [J], 孙兰清;葛临东
5.一种改进的变步长常模判决反馈盲均衡算法 [J], 张家生;崔鹏鹏;沈忱;韩迎鸽因版权原因,仅展示原文概要,查看原文内容请购买。
![常数模盲均衡系统模型_水声信道常数模盲均衡:理论、算法与仿真_[共3页]](https://img.taocdn.com/s1/m/cace21b39b6648d7c1c746f0.png)
第2章 常数模盲均衡的基本原理25练码元,均衡器根据接收判决信号和训练码元得到误差信号()e n ,在误差信号的基础上,利用某种自适应算法对均衡器权系数进行更新,最终实现对通信信道特性的补偿。
一旦初步捕获信道特性,均衡器则根据接收到的用户信号跟踪信道的变化。
通常情况下,为了保证均衡器不失锁,需要在发送的用户信号中插入周期的、重复的训练序列。
训练序列的长度与信道的特性以及均衡算法的收敛速度有关,当信道具有严重衰落时,需要发送较长的训练序列或者使用具有较快收敛性能的均衡算法才能使均衡器权系数接近信道的逆。
因此,自适应均衡的跟踪阶段只能够跟踪缓慢变化的信道特性。
根据传统自适应均衡技术的分析可知,对训练序列的需求是浪费通信带宽资源的主要因素,并且如果通信信道出现短时突变情况,需要中断通信,重新初始化接收机。
盲自适应均衡技术采用自适应恢复思想,在不需要训练序列的条件下可以实现对通信信道特性的补偿和跟踪,能够有效节省通信带宽,防止均衡器失锁。
盲均衡技术在无线通信尤其是水声通信系统中体现出了潜在的应用价值。
在已有的各类盲均衡算法中,CMA 盲均衡由于其计算简单、容易实现而得到了重视,但是CMA 盲均衡具有收敛速度慢、收敛后稳态剩余误差大的缺陷[29],因此出现了在CMA 盲均衡基础上的大量改进算法。
需要指出的是,虽然CMA 盲均衡对具有常模特性的发送信号具有稳健的均衡性能,但是CMA 同样可以适用于非常模发送信号的均衡问题,典型的应用是高阶PAM 信号的均衡。
尽管PSK 调制方式普遍应用于相干水声通信系统,在仿真中仍然会引入其他的调制信号来对算法的性能进行比较和分析。
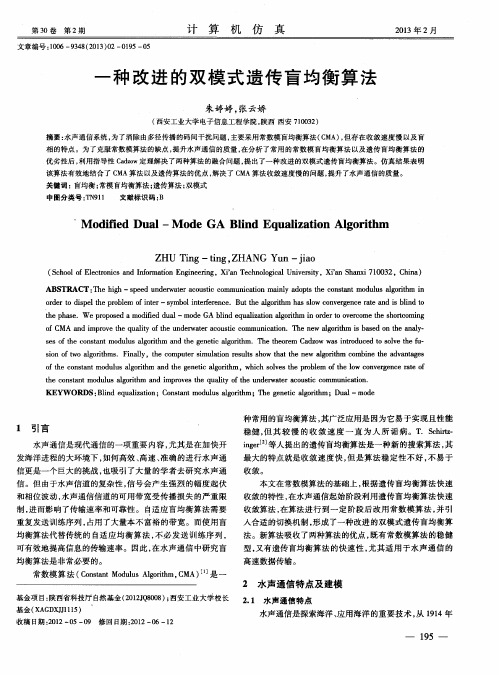
2.2 常数模盲均衡2.2.1 常数模盲均衡系统模型CMA 盲均衡的等效基带模型[30]如图2-2所示。
发送信号()x n 经过未知信道()h n 传输并叠加噪声()n n ,在均衡器前得到观测信号序列()y n ,观测信号()y n 经过均衡器()w n 获得输出信号()xn 。
![盲均衡算法分类_水声信道常数模盲均衡:理论、算法与仿真_[共6页]](https://img.taocdn.com/s1/m/1d03ad0d50e2524de5187ef1.png)
水声信道常数模盲均衡:理论、算法与仿真14为Nx c 。
如果0Nx c ≠,0Nx c ≠ ,根据BBR 公式可知()N Nx Nx i i c c c n =∑(1-46)定义发送信号序列()x n 和均衡器输出信号序列()xn 的(,)M N 阶归一化累积量(,)x K M N 和(,)x K M N 分别为(,)[](,)[]M N x Mx Nx M N x Mx Nx K M N c c K M N c c ⎧=⎪⎨=⎪⎩ (1-47) 根据式(1-46)可得(,)()()(,)M N x i i x i i K M N c n c n K M N ⎡⎤=⎢⎥⎣⎦∑∑(1-48)根据式(1-48),Gadzow 定理可以描述为:假定信道的输入信号()x n 为非高斯、独立同分布的平稳随机过程,则输入、输出的归一化累积量有如下关系成立:① 如果N 为偶数,并且M N >,则有(,)(,)x x K M N K M N ≤;② 如果N 为奇数,并且M N <,则有(,)(,)x x K M N K M N ≥。
Gadzow 定理从归一化累积量的角度证明了盲均衡实现的条件,可在上述结论基础上,利用极值化方法构建盲均衡算法,由于累积量的阶数在Gadzow 定理中是可以选择的,因此在Gadzow 定理的基础上形成了一簇盲均衡算法,使得Gadzow 定理具有很好的推广价值。
实质上,大多数盲均衡算法的理论基石均是信道系统输入输出之间的高阶统计特性与信道系统本身特性之间的关联,在盲均衡算法的设计和性能分析中,信号的高阶统计特性都是有力的数学工具。
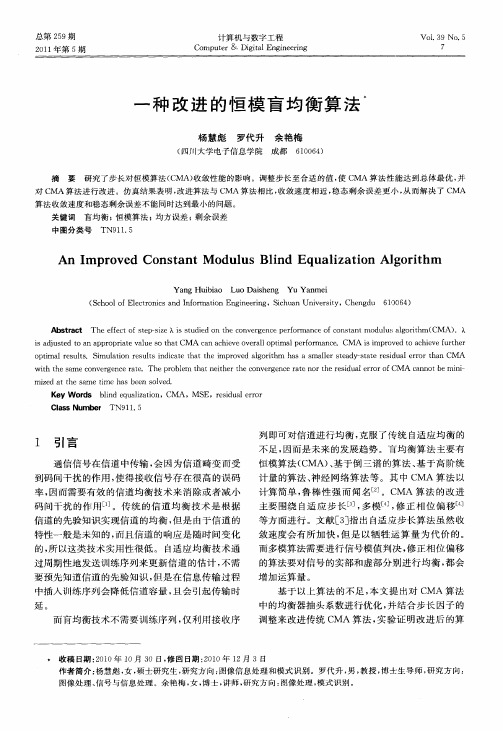
1.3.2 盲均衡算法分类盲均衡算法不依赖于发送信号和通信信道的信息,仅根据接收观测信号实现对发送信号的恢复,为了设计一种能够自适应调节均衡器权系数的算法,需要对接收观测信号进行非线性变换。
针对非线性变换的时机不同,可以将盲均衡算法分为三类[21]:Bussgang 类盲均衡算法、高阶累积量盲均衡算法和非线性均衡器盲均衡算法,如图1-6所示。
第6章 脉冲噪声环境下的常数模盲均衡145 从图6-1和图6-2中可以看出,无论是LMS-CMA 还是RLS-CMA 盲均衡,随着信噪比的降低,性能都有所退化,尤其是当信噪比降低到10 dB 以下时,剩余码间干扰急剧上升。
尽管在LMS-CMA 盲均衡中,可以将步长因子设置得足够小,以降低剩余码间干扰,但是过小的步长因子将导致过慢的收敛速度,在时变信道中,将不利于均衡算法对信道特性变化的实时跟踪。
同理,在RLS-CMA 盲均衡中,可以加大遗忘因子来获得较低的剩余码间干扰,但是付出的代价也是收敛速度的降低。
因此,信道噪声对均衡性能的影响不可以忽略,盲均衡算法的抗噪声能力也是评价盲均衡算法性能的一个重要标准。
如果信道噪声为脉冲噪声,短时大幅度的脉冲干扰则会导致盲均衡算法变得极不稳定,严重情况下会直接导致算法失效。
基于CMA 盲均衡代价函数的LMS-CMA 和RLS-CMA 在脉冲噪声条件下的信道盲均衡中,都是不可靠的。
6.2.2 α-稳定分布近年来工程实践表明,无线通信信道常受到一种具有短时大幅度脉冲的噪声干扰[116],这类噪声不能简单地用具有指数拖尾的高斯分布来建模,只能用具有代数拖尾的非高斯过程来描述。
典型的例子是城市无线移动通信信道中的电磁噪声和热带浅海环境噪声[117]。
信道脉冲噪声的分布与高斯分布接近,但是具有厚拖尾特征。
脉冲噪声模型经常用α-稳定分布噪声模型来表示。
α-稳定分布的概念最早是由Levy 于1925年在研究广义中心极限定理时引出的。
广义中心极限定理表明,对无限多的独立同分布随机变量的和,无论是否具有有限方差,随着变量数目的增多,都将收敛于α-稳定分布。
由于α-稳定分布的概率密度比高斯概率密度分布具有更厚的拖尾,因此其远离均值或中值的样本数较多,从而造成了其在时域波形上具有较多的尖峰脉冲。
α-稳定分布作为一类特殊的厚拖尾分布已经被应用到许多场合,丹麦人Holtsmark 最早将稳定规则应用于物理中,他发现星际间引力场的随机波动在某些假设条件下是服从特征指数 1.5α=的稳定规则。
( 此文档为word 格式,下载后您可任意编辑修改!)CMA 盲均衡算法仿真研究摘要盲均衡是一种新兴的自适应均衡技术,它不需要参考输入的训练序列来维持正常工作,仅依据接收序列本身的先验信息来均衡信道特性。
自它出现后,就得到广泛的关注,并在许多领域中得到应用。
本文系统地分析研究和归纳总结了盲均衡的基本理论。
重点分析了Bussgang类盲均衡算法中的恒模(CMA, Constant Modulus Algorithm )盲均衡算法。
分析了传统CMA盲均衡算法的收敛性能,由于采用固定步长,使得收敛速度和收敛精度之间相互制约,其应用受到很大的限制。
为了解决这一矛盾,本文提出了一种基于均方误差(MSE, Mean Square Error)的CMA盲均衡算法,这是一种利用时变步长来代替固定步长的自适应变步长CMA盲均衡算法,并进行了计算机仿真。
结果表明改进算法相对于CMA算法收敛性能有一定的提高。
关键字:盲均衡,恒模算法, 变步长,均方误差CMA BLIND EQUALIZATION ALGORITHM SIMULATIONABSTRACTThis paper analyzed systematically studies and summaried the blind balanced elementary theory. Analysis focused on the Bussgang type blind equalization of constant modulus algorithm (CMA, Constant Modulus Algorithm) algorithm for blind equalization. This paper analyzes of the traditional CMA blind equalization algorithm performance, as a result of the use of fixed-step, making convergence speed and residual error become a contradiction, which makes the application fields of CMA algorithm limited. In order to solve thecontradiction ,this paper derives an improved CMA blind equalization algorithm utilizing the vary of MSE. This is an adaptive variable step-size CMA blind equalization algorithm, which uses a time-varying step size to replace the fixed step size. The simulation with computer shows the improved algorithms CMA algorithm.KEYWORDS: blind equalization , Constant Modulus Algorithm , variable step-size, Mean Square Error目录摘要(中文)................................................................... I...摘要(外文).. (II)1绪论 (1)1.1研究盲均衡的目的和意义 (1)1.2盲均衡的研究现状 (2)1.3衡量算法收敛性能的指标 (3)2恒模算法 (4)2.1盲均衡的基本结构 (4)2.2Bussgang类盲均衡算法 (6)2.2.1决策指向算法 (7)2.2.2 Sato 算法 (7)2.2.3 Godard 算法 (8)2.3恒模算法的提出 (8)2.4恒模算法的理论推导 (9)2.5步长因子对恒模算法收敛性能的影响 (11)3基于剩余误差的变步长恒模盲均衡算法 (17)3.1恒模算法中剩余误差的分析 (17)3.2基于MSE的变步长恒模盲均衡算法 (18)3.2.1基于MSE的变步长恒模盲均衡算法的表达形式 (18)3.2.2算法性能分析 (18)3.3基于MSE的变步长恒模算法的MATLAB实现 (19)结论 (24)参考文献 (25)附录 (26)致谢 (32)1 绪论盲均衡是一种新兴的自适应均衡技术,它不需要参考输入的训练序列来维持正常工作,仅依据接收序列本身的先验信息来均衡信道特性。