上海交大运动控制直流无刷电机实验报告
- 格式:docx
- 大小:160.50 KB
- 文档页数:13
直流电动机实验报告直流电动机实验报告引言直流电动机是一种常见的电动机类型,广泛应用于工业生产和日常生活中。
本实验旨在通过实际操作和数据记录,探究直流电动机的工作原理和性能特点。
实验目的1. 了解直流电动机的基本结构和工作原理;2. 掌握直流电动机的调速方法;3. 研究直流电动机的性能特点,如转速、转矩和效率等。
实验器材1. 直流电动机;2. 直流电源;3. 电流表和电压表;4. 转速测量仪。
实验步骤1. 将直流电动机与电源连接,确保电源开关处于关闭状态;2. 通过电流表和电压表测量直流电动机的额定电流和额定电压;3. 打开电源开关,观察直流电动机的运转情况;4. 使用转速测量仪测量直流电动机的转速;5. 调节电源电压,记录不同电压下的转速和电流数据。
实验结果与分析通过实验记录的数据,我们可以得到直流电动机的转速和电流随电压变化的关系。
在低电压下,电动机的转速较低,电流较小;而在高电压下,电动机的转速较高,电流较大。
这是因为直流电动机的转速与电压成正比,电流与负载有关。
此外,我们还可以计算直流电动机的效率。
效率是指电动机输出的功率与输入的功率之比。
通过测量电动机的输入电流和电压,以及输出的机械功率,我们可以计算出直流电动机的效率。
实验结果显示,直流电动机的效率随着负载的增加而下降,这是因为在负载增加的情况下,电动机需要消耗更多的能量来克服摩擦力和阻力。
讨论与结论本实验通过实际操作和数据记录,深入探究了直流电动机的工作原理和性能特点。
通过分析实验结果,我们可以得出以下结论:1. 直流电动机的转速与电压成正比,电流与负载有关;2. 直流电动机的效率随着负载的增加而下降;3. 直流电动机在不同电压下的运转情况各异,可以根据实际需求进行调速。
在实际应用中,直流电动机具有广泛的用途,如工业生产中的机械传动、交通工具中的驱动系统以及家用电器中的电机等。
了解直流电动机的性能特点对于正确选择和使用电动机至关重要。
实验二直流无刷电机实验一、实验目的1、掌握直流无刷电机的组成、工作原理及特点。
2、初步了解DSP的工作原理。
3、了解DSP控制无刷电机的方法。
4、掌握工作特性的测定方法二、预习要点1、分析掌握直流无刷电机的运行原理。
2、了解直流无刷电机的控制方法。
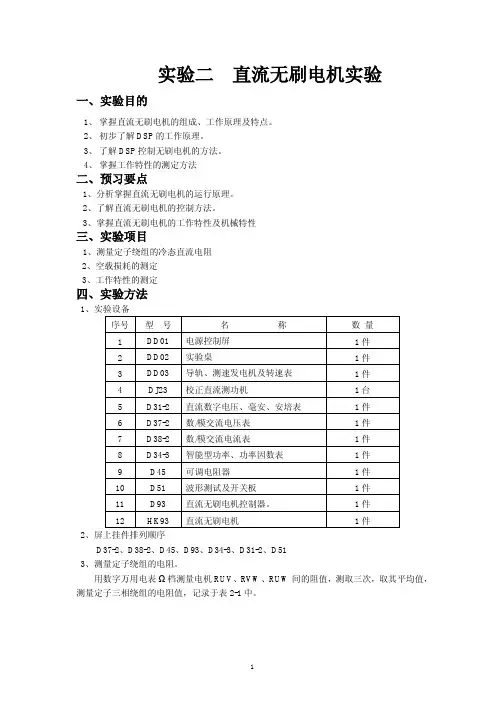
3、掌握直流无刷电机的工作特性及机械特性三、实验项目1、测量定子绕组的冷态直流电阻2、空载损耗的测定3、工作特性的测定四、实验方法1、实验设备序号型号名称数量1 DD01 电源控制屏1件2 DD02 实验桌1件3 DD03 导轨、测速发电机及转速表1件4 DJ23 校正直流测功机1台5 D31-2 直流数字电压、毫安、安培表1件6 D37-2 数/模交流电压表1件7 D38-2 数/模交流电流表1件8 D34-3 智能型功率、功率因数表1件9 D45 可调电阻器1件10 D51 波形测试及开关板1件11 D93 直流无刷电机控制器。
1件12 HK93 直流无刷电机1件2、屏上挂件排列顺序D37-2、D38-2、D45、D93、D34-3、D31-2、D513、测量定子绕组的电阻。
用数字万用电表Ω档测量电机RUV、RVW、RUW间的阻值,测取三次,取其平均值,测量定子三相绕组的电阻值,记录于表2-1中。
表2-1 室温℃2个电机绕组的阻值RUV(Ω)RVW(Ω)RUW(Ω)123电机绕组1的阻值:电机绕组2的阻值:电机绕组3的阻值:5、空载损耗实验1)检查按图2—3的接线是否正确,图中A、V、W为交流仪表,其中A、V应该选择D37-2和D38-2最上部的模拟仪表量程分别选择0.3A(注意A表的测量短接按键要按下使仪表处于测量状态)和300V(选择数字仪表无法读取数据),量程选择是否正确、W可以使用数字仪表。
2)直流无刷电机直接与测速轴编码器部分连接。
先将输入交流电压调到AC220V。
3)再将调节D93调速电位器调至0,按D93上的起动按钮,D93上的显示窗口显示0000,再调节D93调速电位器,使M起动,使转速达到1500r/min,然后逐次降低电压直至转速为零,待运行稳定后记录U o、I o、P o、n各参数于下表2-4中。
直流无刷电机实验一.实验目的1.了解直流无刷电机的运行原理2.掌握直流无刷电机的DSP控制。
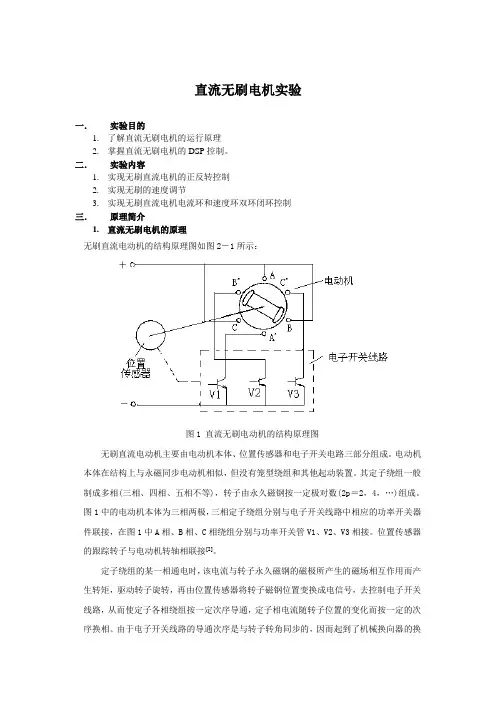
二.实验内容1.实现无刷直流电机的正反转控制2.实现无刷的速度调节3.实现无刷直流电机电流环和速度环双环闭环控制三.原理简介1.直流无刷电机的原理无刷直流电动机的结构原理图如图2-1所示:图1 直流无刷电动机的结构原理图无刷直流电动机主要由电动机本体、位置传感器和电子开关电路三部分组成。
电动机本体在结构上与永磁同步电动机相似,但没有笼型绕组和其他起动装置。
其定子绕组一般制成多相(三相、四相、五相不等),转子由永久磁钢按一定极对数(2p=2,4,…)组成。
图1中的电动机本体为三相两极,三相定子绕组分别与电子开关线路中相应的功率开关器件联接,在图1中A相、B相、C相绕组分别与功率开关管V1、V2、V3相接。
位置传感器的跟踪转子与电动机转轴相联接[2]。
定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场相互作用而产生转矩,驱动转子旋转,再由位置传感器将转子磁钢位置变换成电信号,去控制电子开关线路,从而使定子各相绕组按一定次序导通,定子相电流随转子位置的变化而按一定的次序换相。
由于电子开关线路的导通次序是与转子转角同步的,因而起到了机械换向器的换向作用。
所以,所谓直流无刷电动机,就其基本结构而言,可以认为是一台由电子开关线路、永磁式同步电动机以及位量传感器三者组成的“电动机系统”。
其原理框图如图2所示。
图2 直流无刷电动机的原理框图2. 直流无刷电机的控制直流无刷电机的控制基本上类似于直流有刷电机的控制(PWM 调制),但由于无刷直流电机用电子换向器取代了机械电刷,所以无刷直流电机除了在控制各相电枢电流的同时还用对电子换向器进行控制。
在无刷直流电机的运行过程中,霍尔位置传感器不断检测电机当前位置,控制器根据当前位置信息来判断下一个电子换向器的导通时序。
如图3所示H1H3ANCBNCBNA CNAH2CNBANB AZXCyWBuV旋转方向反向图1 电子换向器的工作原理图中H1、H2和H3分别表示霍尔位置传感器的信号,H1的有效期为X 轴到u 轴的正半周,H2的有效器为V轴到y轴的正半周,H3的有效期为W轴到z轴的正半周,有效是霍尔对应的信号为1。

《运动控制系统综合实验》实验报告小组成员:直流无刷电机实验报告一、实验目的通过对8257的编程控制,发出可以驱动直流无刷电机的六路PWM 波,实现对电机的控制。
二、实验原理1.直流无刷电机驱动原理这部分在PPT里有详细介绍,简单来说就是要根据转子上的三个霍尔传感器的状态发出下一步所需的三相电流。
刚开始时我对这部分原理迟迟不能搞透彻,对着向量图思考了好久,就是不能把霍尔传感器的状态和所需电流方向对应起来。
主要问题是那个PPT上的向量图没有清楚的思考步骤,导致我把定子的磁场一直当成转子的看,当然搞不清楚。
后来在和身边同学交流后才明白。
然后我按照六步驱动法得到了逆时针转动所需的霍尔状态表,如图1左,经验证此状态表是可以成功驱动电机的。
搞定逆时针转动后我趁热打铁,把顺时针转动的霍尔状态表也写了出来。
但是最开始我想当然的以为把逆时针的状态倒过来对应霍尔传感器的值电机就会反转,经过试验后证明这种思路是错误的,电机还是逆时针转动。
我想了好久没想明白,只好又从头推了一遍顺时针转动所需的状态表,如图一右。
前后对比我们发现相同霍尔状态时,正反所需的电流恰好相反,也即相差180°。
再回想推导过程中实际是用下一个状态的电流对应本状态的霍尔值,我一下豁然开朗。
我判断电机在某一位置时允许有60°的误差,逆时针转动时上一个状态加上60°,顺时针转动时则减去60°,所以顺时针逆时针转动正好差了180°。
霍尔传感器的状态和所需电流如下表:2.相序确定上述表格中A,B,C其实是我们假定的,与霍尔元件HaHbHc 对应的ABC并不对应,所以我们还要确定一下三相相序。
考虑到我们只给三相电机提供A正B负的电流时,电机转子应该停在一个确定的位置,而这个位置对应的霍尔状态值为010。
那么当我们任意通入一正一负的电流时,若霍尔状态值为010,此时正电流即A相,负电流即B相。
按此方法即可确定相序,所用的A正B负程序如下:写在main里面是为了一直发出A正B负的电流。
直流电动机实验报告
当涉及到直流电动机的实验报告时,我们需要考虑实验的目的、原理、实验步骤、结果分析和结论等方面。
以下是一个可能的实验
报告结构:
1. 实验目的,在这一部分,我们会明确阐述实验的目的,例
如研究直流电动机的特性、了解电动机的工作原理等。
2. 原理介绍,这一部分会简要介绍直流电动机的工作原理,
包括电动机的结构、工作原理和相关的理论知识。
3. 实验步骤,这一部分会详细描述实验的步骤,包括实验所
需的仪器设备、实验操作流程,以及需要注意的安全事项。
4. 实验结果,在这一部分,我们会列出实验的数据和观察结果,可能包括电动机的转速、电流、电压等数据。
5. 结果分析,这一部分会对实验结果进行分析,可能包括对
数据的处理和图表的绘制,以及对实验现象的解释和理论知识的联系。
6. 结论,最后,我们会总结实验的结果,回答实验目的是否达到,对实验中遇到的问题进行讨论,并提出可能的改进方案。
以上是一个可能的直流电动机实验报告的结构,根据具体的实验内容和要求,实验报告的结构和内容可能会有所不同。
希望这些信息能够帮助到您。
直流无刷电机实验总结
直流无刷电机实验可以分为三个部分:硬件搭建、软件编程和实验测试。
下面对每个部分进行总结:
1.硬件搭建首先需要准备的材料包括:直流无刷电机、电机驱动模块、Arduino 控制板、电源和相关的连接线。
将电机驱动模块和控制板连接好,再将电机连
接到电机驱动模块上。
确定好电源电压,将电源接上即可。
2.软件编程在Arduino开发环境中,需要编写程序来控制电机。
首先需要引用
相关的库文件并初始化电机驱动模块。
然后编写程序来控制电机的转速和方向。
最后将程序上传到控制板上即可。
3.实验测试在实验测试过程中,可以通过改变程序中的控制参数来测试不同的电机转速和方向。
同时,也需要注意保护控制板和电机,防止出现过电流和短路等问题。
总体来说,这个实验可以帮助学生更好地理解直流无刷电机的原理和控制方法,同时
也锻炼了学生的动手能力和编程能力。
一、实验目的1. 理解直流电机的基本工作原理和特性。
2. 掌握直流电机的实验方法,包括空载特性、负载特性和调速特性。
3. 分析并比较不同类型直流电机的性能差异。
4. 培养实验操作能力和数据分析能力。
二、实验原理直流电机是一种将直流电能转换为机械能的装置,主要由电枢、磁极、换向器和电刷等部分组成。
实验中主要研究直流电机的以下特性:1. 空载特性:指在无负载情况下,电机转速与电压的关系。
2. 负载特性:指在负载情况下,电机转速与负载的关系。
3. 调速特性:指电机在不同负载下,转速随电压的变化规律。
三、实验设备1. 直流电机实验台2. 直流电源3. 电压表4. 电流表5. 阻抗箱6. 负载装置四、实验步骤1. 空载特性实验:- 调节直流电源电压,使电机空载运行。
- 测量并记录不同电压下电机的转速。
- 绘制空载特性曲线。
2. 负载特性实验:- 在空载特性实验的基础上,逐渐增加负载。
- 测量并记录不同负载下电机的转速和电流。
- 绘制负载特性曲线。
3. 调速特性实验:- 在负载特性实验的基础上,调节直流电源电压。
- 测量并记录不同电压下电机的转速和电流。
- 绘制调速特性曲线。
4. 不同类型直流电机性能比较:- 分别进行并励直流电机、串励直流电机和复励直流电机的实验。
- 比较不同类型直流电机的空载特性、负载特性和调速特性。
五、实验结果与分析1. 空载特性:- 实验结果表明,空载时电机转速与电压呈线性关系。
- 当电压增加时,转速也随之增加。
2. 负载特性:- 实验结果表明,负载时电机转速与电流呈非线性关系。
- 当负载增加时,转速下降,电流增加。
3. 调速特性:- 实验结果表明,不同电压下,电机的转速和电流存在一定的规律。
- 当电压降低时,转速降低,电流增加。
4. 不同类型直流电机性能比较:- 并励直流电机:转速随电压变化较小,适用于负载变化较小的场合。
- 串励直流电机:转速随负载变化较大,适用于负载变化较大的场合。
一、实训背景随着科技的不断发展,电机作为重要的动力设备,在各个领域得到了广泛的应用。
直流无刷电机作为一种新型电机,因其结构简单、效率高、寿命长等优点,越来越受到人们的关注。
为了提高我们对直流无刷电机的认识和理解,我们进行了为期一周的直流无刷电机实训。
二、实训目的1. 了解直流无刷电机的结构、原理和特点。
2. 掌握直流无刷电机的驱动控制方法。
3. 熟悉直流无刷电机的调试和故障排除方法。
4. 培养实际操作能力和团队合作精神。
三、实训内容1. 直流无刷电机结构及原理实训过程中,我们首先了解了直流无刷电机的结构。
直流无刷电机主要由转子、定子、驱动电路和传感器等组成。
转子由永磁体和转子铁芯组成,定子由线圈和铁芯组成,驱动电路用于控制电机的工作状态,传感器用于检测电机的位置和转速。
2. 直流无刷电机驱动控制方法实训中,我们学习了直流无刷电机的驱动控制方法。
直流无刷电机的驱动控制主要采用PWM(脉冲宽度调制)技术,通过调整PWM信号的占空比来控制电机的转速和转矩。
实训过程中,我们使用了专门的驱动器对直流无刷电机进行控制,掌握了PWM信号的产生和调整方法。
3. 直流无刷电机的调试和故障排除在实训过程中,我们对直流无刷电机进行了调试和故障排除。
调试主要包括调整电机的转速和转矩,以及检测电机的运行状态。
故障排除主要包括分析电机的故障原因,并采取相应的措施进行处理。
4. 实际操作实训的最后阶段,我们进行了实际操作。
在实验指导老师的指导下,我们组装了一个简单的直流无刷电机驱动系统,并进行了实际运行测试。
通过实际操作,我们进一步加深了对直流无刷电机的认识,提高了实际操作能力。
四、实训总结通过本次实训,我们取得了以下成果:1. 熟悉了直流无刷电机的结构、原理和特点。
2. 掌握了直流无刷电机的驱动控制方法。
3. 熟悉了直流无刷电机的调试和故障排除方法。
4. 培养了实际操作能力和团队合作精神。
同时,我们也发现了一些不足之处:1. 对直流无刷电机的理论知识掌握还不够深入。
《运动控制系统综合实验》实验报告小组成员:直流无刷电机实验报告一、实验目的通过对8257的编程控制,发出可以驱动直流无刷电机的六路PWM 波,实现对电机的控制。
二、实验原理1.直流无刷电机驱动原理这部分在PPT里有详细介绍,简单来说就就是要根据转子上的三个霍尔传感器的状态发出下一步所需的三相电流。
刚开始时我对这部分原理迟迟不能搞透彻,对着向量图思考了好久,就就是不能把霍尔传感器的状态与所需电流方向对应起来。
主要问题就是那个PPT上的向量图没有清楚的思考步骤,导致我把定子的磁场一直当成转子的瞧,当然搞不清楚。
后来在与身边同学交流后才明白。
然后我按照六步驱动法得到了逆时针转动所需的霍尔状态表,如图1左,经验证此状态表就是可以成功驱动电机的。
搞定逆时针转动后我趁热打铁,把顺时针转动的霍尔状态表也写了出来。
但就是最开始我想当然的以为把逆时针的状态倒过来对应霍尔传感器的值电机就会反转,经过试验后证明这种思路就是错误的,电机还就是逆时针转动。
我想了好久没想明白,只好又从头推了一遍顺时针转动所需的状态表,如图一右。
前后对比我们发现相同霍尔状态时,正反所需的电流恰好相反,也即相差180°。
再回想推导过程中实际就是用下一个状态的电流对应本状态的霍尔值,我一下豁然开朗。
我判断电机在某一位置时允许有60°的误差,逆时针转动时上一个状态加上60°,顺时针转动时则减去60°,所以顺时针逆时针转动正好差了180°。
霍尔传感器的状态与所需电流如下表:2.相序确定上述表格中A,B,C其实就是我们假定的,与霍尔元件HaHbHc对应的ABC并不对应,所以我们还要确定一下三相相序。
考虑到我们只给三相电机提供A正B负的电流时,电机转子应该停在一个确定的位置,而这个位置对应的霍尔状态值为010。
那么当我们任意通入一正一负的电流时,若霍尔状态值为010,此时正电流即A相,负电流即B相。
按此方法即可确定相序,所用的A正B负程序如下:写在main里面就是为了一直发出A正B负的电流。
一、实验目的1. 了解无刷直流电机的结构、工作原理及其特性。
2. 掌握无刷直流电机的驱动电路设计方法。
3. 学习无刷直流电机的控制方法,包括启动、正反转、调速等。
4. 通过实验验证无刷直流电机的性能指标。
二、实验原理无刷直流电机(BLDC)是一种新型的直流电机,它采用电子换向器代替传统的机械换向器,具有高效、节能、体积小、寿命长等优点。
无刷直流电机的转子由永磁体和电枢铁心组成,定子由电枢绕组和电子换向器组成。
无刷直流电机的驱动电路主要包括电源、驱动器、传感器和电机本体。
驱动器负责将电源电压转换为适合电机运行的电压,传感器用于检测电机的转速和位置,电子换向器根据传感器信号实现电机的换向。
三、实验设备1. 无刷直流电机(型号:NMB 2406KL-04W-B36)2. 驱动器(型号:A123456)3. 电源(电压:12V)4. 传感器(型号:7891011)5. 示波器6. 万用表7. 螺丝刀四、实验步骤1. 连接电路:将无刷直流电机、驱动器、电源和传感器按照实验电路图连接好。
2. 测试电机:打开电源,观察电机是否能正常启动,并检查电机转速是否稳定。
3. 测试驱动器:使用示波器观察驱动器输出电压和电流波形,验证驱动器工作是否正常。
4. 测试传感器:使用示波器观察传感器输出信号,验证传感器工作是否正常。
5. 测试控制方法:启动:通过控制驱动器输出电压和电流,实现电机的启动。
正反转:通过改变驱动器输出电压和电流的极性,实现电机的正反转。
调速:通过改变驱动器输出电压和电流的大小,实现电机的调速。
6. 数据记录:记录电机在不同工作状态下的转速、电压、电流等数据。
五、实验结果与分析1. 电机启动:实验中,无刷直流电机能顺利启动,说明电机和驱动器工作正常。
2. 驱动器测试:通过示波器观察驱动器输出电压和电流波形,发现波形平滑,无异常,说明驱动器工作正常。
3. 传感器测试:通过示波器观察传感器输出信号,发现信号稳定,无异常,说明传感器工作正常。
一、实验目的1. 了解直流电机的结构和工作原理。
2. 掌握直流电机的特性曲线及其测量方法。
3. 学习直流电机的启动、调速和控制方法。
4. 分析直流电机的运行状态,提高电机控制能力。
二、实验器材1. 直流电机:DJ13型,额定电压200V,额定电流0.5A,额定功率100W。
2. 直流电源:可调电压,最大输出电压300V。
3. 电阻箱:可调电阻,最大阻值100Ω。
4. 电流表:量程0-10A,精度0.5级。
5. 电压表:量程0-300V,精度0.5级。
6. 测功机:用于测量电机输出转矩。
7. 计时器:用于测量电机启动时间。
三、实验原理直流电机是一种将直流电能转换为机械能的电机。
其基本结构包括定子、转子和电刷。
当直流电通过电刷和转子绕组时,会产生磁场,从而驱动转子旋转。
四、实验步骤1. 测量电机空载特性:(1)将直流电机接入电路,调节电阻箱,使电机负载为空载状态。
(2)调节直流电源电压,从低到高逐渐增加,记录不同电压下的转速和励磁电流。
(3)绘制空载特性曲线。
2. 测量电机外特性:(1)将直流电机接入电路,调节电阻箱,使电机负载为额定负载。
(2)调节直流电源电压,从低到高逐渐增加,记录不同电压下的转速、励磁电流和电机输出转矩。
(3)绘制外特性曲线。
3. 测量电机调节特性:(1)将直流电机接入电路,调节电阻箱,使电机负载为额定负载。
(2)调节直流电源电压,从低到高逐渐增加,记录不同电压下的转速、励磁电流和电机输出功率。
(3)绘制调节特性曲线。
4. 测量电机启动时间:(1)将直流电机接入电路,调节电阻箱,使电机负载为空载状态。
(2)接通直流电源,记录电机启动时间。
五、实验结果与分析1. 空载特性曲线:从空载特性曲线可以看出,当电压一定时,电机转速随励磁电流的增加而增大。
当励磁电流达到一定值时,电机转速趋于稳定。
2. 外特性曲线:从外特性曲线可以看出,当负载一定时,电机转速随电压的增加而增大。
当电压一定时,电机转速随负载的增加而减小。
一、实验目的1. 了解无刷电机的结构和工作原理。
2. 掌握无刷电机的驱动电路和控制系统。
3. 通过实验,验证无刷电机的电气特性和调速特性。
4. 提高动手能力和实验技能。
二、实验原理无刷电机(Brushless Motor)是一种无需碳刷的直流电机,主要由转子、定子和驱动电路三部分组成。
转子采用永磁材料制成,定子由绕组组成,驱动电路通过控制绕组的电流来改变电机的转速和转向。
三、实验设备1. 无刷电机实验平台2. 电压源3. 示波器4. 光电反射式转速表5. 万用表6. 电烙铁7. 电线、连接器等四、实验步骤1. 无刷电机拆卸与观察- 将无刷电机拆卸,观察其内部结构,了解转子和定子的组成。
- 分析霍尔元件、驱动芯片等控制部分的作用。
2. 无刷电机驱动电路测试- 使用示波器观察驱动电路中霍尔元件输出的信号波形。
- 使用万用表测量驱动电路中各个元件的电压和电流。
3. 无刷电机电气特性测试- 通过改变电压源输出电压,观察无刷电机的转速变化。
- 使用光电反射式转速表测量不同电压下无刷电机的转速。
- 记录并分析无刷电机的转速-电压特性曲线。
4. 无刷电机调速特性测试- 使用电压源和转速表,测试无刷电机在不同负载下的转速变化。
- 分析无刷电机的转速-负载特性曲线。
5. 无刷电机正反转控制- 通过改变驱动电路中绕组的连接方式,实现无刷电机的正反转。
- 使用示波器观察电机正反转时的信号波形。
五、实验结果与分析1. 无刷电机电气特性- 通过实验,验证了无刷电机的转速与电压成正比关系。
- 分析了无刷电机的转速-电压特性曲线,发现其呈线性关系。
2. 无刷电机调速特性- 通过实验,发现无刷电机的转速随着负载的增加而下降。
- 分析了无刷电机的转速-负载特性曲线,发现其呈非线性关系。
3. 无刷电机正反转控制- 通过改变驱动电路中绕组的连接方式,实现了无刷电机的正反转。
- 分析了正反转控制信号波形,发现其与电机转向有关。
六、实验结论1. 无刷电机是一种高性能的电机,具有结构简单、运行可靠、寿命长等优点。
一、实验目的1. 了解直流电动机的工作原理和结构;2. 掌握直流电动机的工作特性和机械特性;3. 学习直流电动机的调速方法;4. 熟悉实验仪器的使用方法。
二、实验原理直流电动机是将直流电能转换为机械能的装置,其工作原理是利用电磁感应原理。
当直流电流通过电动机的电枢绕组时,产生磁场,与永磁体或电磁铁的磁场相互作用,从而产生力矩,使电枢旋转。
直流电动机的工作特性包括转速特性、转矩特性、功率特性等。
转速特性是指在一定负载下,电动机转速与输入电压之间的关系;转矩特性是指在一定电压下,电动机转矩与负载之间的关系;功率特性是指在一定负载下,电动机功率与输入电压之间的关系。
直流电动机的调速方法有电压调速、电流调速、磁场调速等。
电压调速是通过改变电枢电压来改变电动机转速;电流调速是通过改变电枢电流来改变电动机转速;磁场调速是通过改变磁场强度来改变电动机转速。
三、实验仪器与设备1. 直流电动机;2. 直流电源;3. 测功机;4. 转速表;5. 电流表;6. 电压表;7. 电阻箱;8. 实验台。
四、实验步骤1. 接线:按照实验电路图连接好实验装置,确保连接正确、牢固。
2. 测量空载转速:将直流电源调至一定电压,使电动机空载运行,记录转速表读数。
3. 测量负载转速:在电动机轴上加载一定的负载,记录转速表读数。
4. 测量电压、电流、转矩:记录电动机运行时的电压、电流、转矩数值。
5. 改变电枢电压:调整直流电源电压,观察电动机转速、转矩的变化。
6. 改变负载:调整负载,观察电动机转速、转矩的变化。
7. 改变励磁电流:调整励磁电流,观察电动机转速、转矩的变化。
五、实验数据与分析1. 空载转速:实验测得空载转速为n1,理论计算转速为n2,误差为Δn = n2 - n1。
2. 负载转速:实验测得负载转速为n3,理论计算转速为n4,误差为Δn = n4 - n3。
3. 电压、电流、转矩:实验测得电压为U,电流为I,转矩为T。
4. 改变电枢电压:调整电压后,测得转速为n5,转矩为T5。
东南大学自动化学院实验报告课程名称: DSP原理及C程序开发实验名称:直流无刷电机控制综合实验院(系):自动化学院专业:自动化姓名:杨明亮学号:08009117实验室:实验组别:同组人员:实验时间:2012 年5 月20 日评定成绩:审阅教师:直流无刷电机综合控制实验一、实验目的利用F28335核心板与ICETEK-MOTOR-E运动控制板,实现直流无刷电机的驱动与转速控制,利用小键盘或电位器对直流无刷电机进行转速调节,并利用液晶屏显示转速等状态信息。
二、实验要求1. 基本功能①掌握F28335核心板与ICETEK-MOTOR-E运动控制板的使用方法,接线正确,能捕获并证实霍尔传感器状态变化规律(表1);②能正确总结出正/反转控制表(表2),从而控制电机正转/反转;③能通过修改占空比,用示波器观察pwm口输出波形的变化。
2. 提高功能①能通过阅读学习“ICETEK-Motor-E使用说明书.pdf”,发现ICETEK-MOTOR-E运动控制板中的电位器信号,编制程序从DSP相应的ADC输入端口采集该电位器信号,能用CCS图形显示AD变换结果曲线;②能编制程序,利用AD变换结果调节PWM占空比,从而对直流无刷电机进行调速;③能设计基本的人机接口软件,即编制程序,利用小键盘进行正转、反转、停止功能选择,利用液晶屏显示(示意)正转、反转、停止等状态信息,并可自行扩展其它辅助功能。
三、实验原理1.直流无刷电动机ICETEK-F2812-BCM实验箱采用的直流无刷电机是三相方波控制型直流无刷电机(BLDCM),如果按照一定顺序给电机的各相通入方波即可使电机转动,转动的速度及力矩与通入电机定子绕组的电压、电流成正比关系。
2. 电机驱动与控制通过ICETEK-F2812-BCM实验箱,ICETEK-F2812-A板与电机驱动板及直流无刷电机连接,通过编程,TMS320F2812输出的控制信号能够控制电机转动。
直流电动机实验报告直流电动机实验报告引言:直流电动机是一种常见的电动机类型,它具有结构简单、运行稳定、控制方便等优点,在各个领域都有广泛的应用。
本次实验旨在通过实际操作和数据记录,深入了解直流电动机的工作原理和特性。
一、实验目的本次实验的主要目的有以下几点:1. 了解直流电动机的基本结构和工作原理;2. 掌握直流电动机的运行特性及其影响因素;3. 学会使用实验仪器和测量工具。
二、实验装置和方法1. 实验装置:直流电动机、电源、电流表、电压表、转速计等;2. 实验方法:根据实验步骤进行操作,记录并分析实验数据。
三、实验步骤及结果分析1. 实验步骤:(1)接线:将电动机与电源、电流表、电压表等连接,确保接线正确无误;(2)启动电动机:逐步调节电源电压,启动电动机并记录电流和电压值;(3)测量转速:使用转速计测量电动机的转速,并记录数据;(4)改变负载:通过改变电动机的负载,如改变电动机的阻力或负载转矩,记录不同负载下的电流、电压和转速数据;(5)停止电动机:实验结束后,逐步降低电源电压,停止电动机运行。
2. 结果分析:通过实验操作和数据记录,我们可以得到一系列实验数据。
根据这些数据,我们可以分析直流电动机的运行特性和影响因素。
(1)电流与电压关系:根据实验数据,我们可以绘制电流与电压的关系曲线。
从曲线可以看出,电流与电压呈线性关系,即电流随电压的增加而增加。
这是因为在直流电动机中,电流与电压之间存在一定的线性关系。
(2)转速与负载关系:通过改变电动机的负载,我们可以得到不同负载下的转速数据。
实验结果表明,转速随负载的增加而下降。
这是因为在负载增加的情况下,电动机需要承受更大的负载转矩,从而降低了转速。
(3)效率与负载关系:通过计算得到的实验数据,我们可以计算出不同负载下的电动机效率。
实验结果显示,电动机的效率随负载的增加而降低。
这是因为在较大负载下,电动机需要消耗更多的能量来克服负载,从而降低了效率。
直流无刷电机实验报告一、硬件电路原理简述1、总体硬件电路图图总体硬件电路原理图单片机通过霍尔传感器获得转子的位置,并以此为依据控制PWM波的通断。
2、霍尔元件测量值与PWM波通断的关系图霍尔元件测量值与PWM波通断的关系二、软件架构1、Components与变量定义图 Components列表PWMMC是用来产生控制电机的PWM波的。
添加PWMMC时会同时加入一个eFlexPWM。
PWM_Out对应的是GPIO B2口,这个口电位为高时,电压才会被加到电机上。
GPIO B3控制着一个继电器,用于防止启动时过大的冲击电流。
程序开始后不久就应把B3置高。
Halla、Hallb、Hallc对应于3个霍尔传感器。
依次为GPIOC3、C4、C6。
TimerInt是用于测速的。
根据2次霍尔元件的中断间的时间间隔来计算转速。
2、电机旋转控制代码for(;;){Hall_Sensor = 0b00000000;Halla = Halla_GetVal();Hallb = Hallb_GetVal();Hallc = Hallc_GetVal();if(Halla)Hall_Sensor |= 0b00000100;if(Hallb)Hall_Sensor |= 0b00000010;if(Hallc)Hall_Sensor |= 0b00000001;switch(Hall_Sensor){case 0b0000011:PESL(eFPWM1_DEVICE, PWM_OUTPUT_A, PWM_SM1_ENABLE);PESL(eFPWM1_DEVICE, PWM_OUTPUT_B, PWM_SM2_ENABLE);break;case 0b0000001:PESL(eFPWM1_DEVICE, PWM_OUTPUT_A, PWM_SM1_ENABLE);PESL(eFPWM1_DEVICE, PWM_OUTPUT_B, PWM_SM0_ENABLE);break;case 0b0000101:PESL(eFPWM1_DEVICE, PWM_OUTPUT_A, PWM_SM2_ENABLE);PESL(eFPWM1_DEVICE, PWM_OUTPUT_B, PWM_SM0_ENABLE);break;case 0b0000100:PESL(eFPWM1_DEVICE, PWM_OUTPUT_A, PWM_SM2_ENABLE);PESL(eFPWM1_DEVICE, PWM_OUTPUT_B, PWM_SM1_ENABLE);break;case 0b0000110:PESL(eFPWM1_DEVICE, PWM_OUTPUT_A, PWM_SM0_ENABLE);PESL(eFPWM1_DEVICE, PWM_OUTPUT_B, PWM_SM1_ENABLE);break;case 0b0000010:PESL(eFPWM1_DEVICE, PWM_OUTPUT_A, PWM_SM0_ENABLE);PESL(eFPWM1_DEVICE, PWM_OUTPUT_B, PWM_SM2_ENABLE);break;}for(i=0;i<6;i++)PWMC1_SetDutyPercent(i,50);PWMC1_Load();}这段代码是main函数中的for循环。
不断地获取霍尔传感器中的值并依此控制PWM波的通断。
获取到的霍尔传感器的值存入Hall_Sensor变量的后3位中。
3、测速及调速代码以下为HallC的中断响应函数。
float RPS_C;double IntTimesC;#pragma interrupt called /* Comment this line if the appropriate 'Interrupt preserve registers' property */ /* is set to 'yes' (#pragma interrupt saveall is generated before the ISR) */ void Hallc_OnInterrupt(void){/* place your Hallc interrupt procedure body here */static bool bFirstInt = 1;if(bFirstInt){bFirstInt = 0;IntTimesC = 0;}else{RPS_C = 1/(IntTimesC* /2;IntTimesC = 0;if(RPS_C>50)DutyPercent-=1;elseDutyPercent+=1;}}计时器每100微秒进入一次中断,每次计时器中断,IntTimesC都会加一。
因此在HallC的中断响应函数能根据IntTimesC计算转速。
RPS_C为根据2次Hallc中断间的间隔计算出的每秒转速。
电机每转一圈,Hallc的中断会进入2次。
Halla和Hallb的中断响应函数中也有类似的代码。
下面这段代码实现了积分调节,能使转速稳定在每秒50转。
if(RPS_C>50)DutyPercent-=1;elseDutyPercent+=1;在main函数的for循环中,每次循环都会根据DutyPercent 设置PWM波的占空比。
4、PWMMC模块的设置(1)添加一个PWMM模块后,软件会弹出一个对话框,提示要添加一个eFlexPWM,点OK就行。
图添加PWMMC(2)在PWMMC的设置里,设置好频率,死区。
频率是PWM的频率,可以设高点。
由于老师给我们的板子上已经有死区了,软件的死区时间其实没有必要。
然后,把Fault Protection里的fault全设为Disabled。
这个好像是某种类型的保护机制,不Disabled的话可能会影响PWM波的输出,基于同样的理由,在下文中,带有Fault字样的选项,全设为Disabled或no。
在Methods项卡中,把SetDutyPercent选上。
图 PWMMC设置(3)在eFlexPWM的设置里,把所有带有红色感叹号的项设为Disabled。
然后展开PWM Faluts。
把fault全设为Disabled。
把Channel A和Channel B的PWM Function里的Channel Output 设为Enable。
注意Channel A和Channel B各有3个。
把Mode设为Independent,共有3处要设。
把Disable by Fault设为no,共24处要设置。
图 eFlexPWM设置三、开发过程中遇到的各种问题及解决方法1、程序改变了,debug时发现运行结果没有任何变化。
改变程序之后,要先点一下Make 按钮,构建一遍之后再debug,否则debug的时候下载进去的还是上次构建的程序。
2、发不出PWM波。
把PWMMC和eFlexPWM的设置里,把带有Fault字样的选项,全设为Disabled或no。
Fault Protection似乎是某种形式的保护机制,没设置好的话会影响PWM波的输出。
还要把Channel A和Channel B的PWM Function里的Channel Output 设为Enable。
注意Channel A和Channel B各有3个。
3、找不到某些函数。
在设置组件的对话框的底部有3个按钮,建议选择EXPERT。
其他2个会隐藏部分函数和设置。
4、能发出PWM波,但是电机不动。
把GPIOB2、B3置1 。
GPIOB2口电位为高时,电压才会被加到电机上。
GPIO B3控制着一个继电器,用于防止启动时过大的冲击电流。
程序开始后不久就应把B3置高。
5、OverI灯一直亮着,电机不动这个问题困扰了我们很久,经检查,输入电压没有过压,没有短路。
后来,在老师的帮助下发现似乎是板子里的程序干扰了电机驱动板对过流的判断。
进一步检查发现把控制LED灯的GPIOE6、E7、F6删除后,问题消失。
事后推测,上述3个GPIO口中应该有一个和OverI相连,可以从这个口读取过流状态。
但是如果把这个口作为输出口,就会影响电机驱动板对过流的判断。
6、PI调节的参数确定在做出积分调节之后,由于我们急于做步进电机,就把电机换了。
但是积分调节是有缺陷的,就是反应慢。
所以还需要比例调节来补足。
但是,PI的参数很难确定,只能凭经验或者一个个试。
下面是我在网上找到的一个方法,也许有帮助。
确定比例系数Kp时,首先去掉PID 的积分项和微分项,可以令Ti=0、Td=0,使之成为纯比例调节。
输入设定为系统允许输出最大值的60%~70%,比例系数Kp由0开始逐渐增大,直至系统出现振荡;再反过来,从此时的比例系数Kp逐渐减小,直至系统振荡消失。
记录此时的比例系数Kp,设定PID的比例系数Kp为当前值的60%~70%。
比例系数Kp确定之后,设定一个较大的积分时间常数Ti,然后逐渐减小Ti,直至系统出现振荡,然后再反过来,逐渐增大Ti,直至系统振荡消失。
记录此时的Ti,设定PID的积分时间常数Ti为当前值的150%~180%。