齿轮时变啮合刚度改进算法及刚度激励研究
- 格式:pdf
- 大小:4.90 MB
- 文档页数:73
斜齿轮副时变啮合刚度计算方法
斜齿轮副时变啮合刚度是指在实际运行过程中,由于副体尺寸误差、
加工精度等原因导致轮齿的啮合关系发生变化,进而使得副体的刚度发生
变化。
斜齿轮副时变啮合刚度的计算方法主要包括以下几个方面:轮齿啮
合误差计算、副体刚度计算和时变啮合刚度计算。
首先,轮齿啮合误差计算是斜齿轮副时变啮合刚度计算的基础。
根据
啮合误差的定义,可以通过测量轮齿的实际尺寸和理论尺寸之间的差异来
计算。
具体的计算方法包括齿根啮合误差、齿顶啮合误差和齿侧啮合误差等。
其次,副体刚度的计算是斜齿轮副时变啮合刚度计算的关键。
副体刚
度包括副体的刚度系数、副体的刚度矩阵和副体的刚度特性等。
副体刚度
的计算可以通过有限元分析或实验测试等方法获得。
最后,根据轮齿啮合误差和副体刚度,可以计算斜齿轮副的时变啮合
刚度。
时变啮合刚度可以用于评估斜齿轮副在实际运行中的运动特性和工
作性能。
计算时变啮合刚度的方法主要包括静态方法和动态方法。
静态方
法是通过将斜齿轮副视为刚体系统,计算系统在给定位移和外载荷下的刚度;动态方法是通过考虑斜齿轮副的动力学特性,计算系统在给定速度和
加速度下的刚度。
综上所述,斜齿轮副时变啮合刚度的计算方法包括轮齿啮合误差计算、副体刚度计算和时变啮合刚度计算。
这些方法可以用于评估斜齿轮副在实
际工作中的性能,并指导优化设计和制造过程。

斜齿轮时变啮合刚度改进算法及影响因素分析
吴鲁纪;杨世豪;冯伟;杨林杰
【期刊名称】《机械强度》
【年(卷),期】2024(46)2
【摘要】在势能法基础上,基于切片积分原理,考虑齿根过渡曲线方程,提出一种改进的斜齿时变啮合刚度计算方法。
该方法考虑了真实齿根过渡曲线参数方程,修正了渐开线齿廓的积分区间,与有限元方法的对比结果验证了算法的有效性,减小了时变啮合刚度的计算误差。
在此方法基础上,分析了齿宽、螺旋角、齿数和模数对时变啮合刚度的影响。
结果表明,时变啮合刚度均值受齿宽影响较大,近似成线性关系;受螺旋角、齿数影响较小;螺旋角增大,均值以较小幅度波动性变化;中心距一定时,齿数增大,时变啮合刚度缓慢增大;齿轮参数改变会影响重合度;轴向重合度为整数时,时变啮合刚度波动值较小。
【总页数】8页(P312-319)
【作者】吴鲁纪;杨世豪;冯伟;杨林杰
【作者单位】郑州机械研究所有限公司;同济大学机械与能源工程学院;河南工业大学机电工程学院
【正文语种】中文
【中图分类】TH132.4
【相关文献】
1.斜齿轮时变啮合刚度算法修正及影响因素研究
2.裂纹故障对斜齿轮时变啮合刚度及振动响应的影响分析
3.考虑温度效应的斜齿轮时变啮合刚度解析算法
4.考虑时变摩擦的直齿轮副啮合刚度计算及其影响因素分析
5.斜齿轮啮合刚度改进算法及其影响因素分析
因版权原因,仅展示原文概要,查看原文内容请购买。
考虑温度效应的斜齿轮时变啮合刚度解析算法
斜齿轮是一种常见的传动装置,其性能对于许多应用非常关键。
在使用斜齿轮时,要考虑其时变啮合刚度对于传动效果和耐久性的影响。
其中,温度效应是影响斜齿轮时变啮合刚度的一个主要因素。
因此,需要开发一种考虑温度效应的斜齿轮时变啮合刚度解析算法。
为了解决这一问题,需要首先分析温度对斜齿轮啮合刚度的影响。
温度变化会引起斜齿轮各部分的膨胀或收缩,从而改变齿轮的几何形状和尺寸。
这将直接影响到啮合刚度。
此外,温度还会影响材料的弹性模量和热传导系数,这也会间接影响啮合刚度。
接下来,需要将这些影响因素考虑进计算模型中。
可以采用有限元分析法,将斜齿轮分解为若干个单元,分别计算各部分的几何变化和材料特性变化对啮合刚度的影响。
这样可以得到斜齿轮不同温度下的时变啮合刚度变化规律。
然而,这样的计算过程较为复杂,需要大量计算资源和专业的有限元分析软件。
为了简化计算过程,可以使用统计方法来建立温度和时变啮合刚度之间的关系模型。
首先,需要设计一组实验,分别在不同的温度下测试斜齿轮的啮合刚度。
这样可以获得一组由温度和啮合刚度构成的样本数据集。
然后,可以使用回归分析等方法,建立温度和时变啮合刚度之间的数学模型。
这样可以在不进行复杂有限元分析的情况下,预测斜齿轮在任意温度下的时变啮合刚度。
综上所述,考虑温度效应的斜齿轮时变啮合刚度解析算法可以通过有限元分析法或统计分析法来实现。
无论哪种方法,都需要考虑斜齿轮几何形状、材料特性、温度变化等多个因素,以获得准确的结论。
这种算法对于斜齿轮可靠、高效的运行具有重要意义。
考虑温度效应的斜齿轮时变啮合刚度解析算法斜齿轮是机械传动中常用的一种齿轮,其优点是可以承受大的轴向负荷和强的振动能力。
然而,在斜齿轮传动中,由于啮合齿轮的位置与运动状态会随着时间的变化而变化,导致其啮合刚度也发生变化。
同时,随着热量的积累,传动系统的温度也会不断升高,进一步影响斜齿轮的啮合刚度。
因此,研究考虑温度效应的斜齿轮时变啮合刚度解析算法,对于提高机械传动的精度和可靠性具有重要意义。
一般来说,斜齿轮啮合刚度可以通过建立对齿轮啮合力、齿形接触变形、弹性变形等参量的数学模型来计算,其中考虑了齿轮的运动状态、齿形形状、材料刚度等多种因素。
在这个基础上,加入温度的影响,可以按照以下步骤求解时变啮合刚度。
第一步,建立动态齿面接触模型。
此模型要考虑齿面接触处的应力分布、接触应力分解为正交于接触面的竖向应力和切向应力,以及接触线的曲率半径。
同时,应根据热传导方程计算接触下一瞬间的温度场,这需要考虑斜齿轮材料的导热性质、表面状态和磨损程度等因素。
第二步,根据温度场和材料参数,计算接触区域内的材料性质参数。
这些参数包括热膨胀系数、屈服强度、热导率、热膨胀系数等等。
这些参数的变化会导致齿轮材料的刚度和弹性特性发生变化,从而影响到啮合刚度。
第三步,利用有限元方法求解齿轮弹性变形及变形导致的应力分布情况,利用与第一步齿面接触模型结合得到分布在齿面上的接触应力分布情况。
同时,可以将温度场与齿轮变形的计算结果结合起来,反过来将齿轮变形带入刚度计算中,从而计算在某瞬间的啮合刚度。
第四步,根据得到的时变啮合刚度计算齿轮受力状态和振动响应情况,以此来评估斜齿轮传动精度和可靠性。
此时,应考虑到齿轮的工作环境和工作条件对刚度、弹性特性和温度的影响。
总之,考虑温度效应的斜齿轮时变啮合刚度解析算法是一个非常复杂的问题,需要综合考虑诸多因素,考验研究者的多方面技能。
然而,只有通过这种研究,才能更好地掌握斜齿轮的性能和特性,进一步提高机械传动的稳定性和可靠性。
考虑温度效应的斜齿轮时变啮合刚度解析算法温度效应是指在斜齿轮传动过程中,由于温度变化而引起的材料性质变化以及由此产生的啮合刚度变化。
斜齿轮传动系统的啮合刚度对于传递扭矩和保持传动精度至关重要。
考虑温度效应对于斜齿轮传动系统的设计和分析非常重要。
本文基于有限元方法,提出了一种考虑温度效应的斜齿轮时变啮合刚度解析算法。
该算法主要包括以下几个步骤:建立斜齿轮传动系统的几何模型,并给出材料的温度-应变关系。
利用有限元方法对斜齿轮进行网格划分,并考虑材料的温度分布。
然后,根据网格划分和温度分布,计算斜齿轮的应变和应力分布。
根据斜齿轮的应力分布,计算其啮合刚度的变化。
在建立斜齿轮传动系统的几何模型时,考虑到温度的影响,需要对材料的热膨胀系数进行考虑。
而在给出材料的温度-应变关系时,可以通过实验或者理论计算得到。
有限元方法是一种数值计算方法,它将实际的连续体划分为有限个小单元,建立了一个离散的代数方程系统,通过求解该方程系统,可以得到模型的应变和应力分布。
在计算斜齿轮的应变和应力分布时,需要考虑材料的热力学性质,如杨氏模量、线膨胀系数等。
通过有限元分析软件,可以得到斜齿轮各个单元的应变和应力分布。
进一步,利用得到的应力分布,可以计算斜齿轮的啮合刚度。
根据斜齿轮的啮合刚度变化,可以对传动系统的动力学特性进行分析和计算。
斜齿轮的啮合刚度变化会对传动系统的共振频率和振动幅值产生影响。
通过考虑温度效应的斜齿轮时变啮合刚度解析算法,可以更准确地分析和设计斜齿轮传动系统,并提高传动精度和工作可靠性。
本文基于有限元方法,提出了一种考虑温度效应的斜齿轮时变啮合刚度解析算法。
该算法可以用于分析斜齿轮传动系统的动力学特性,并提高传动精度和工作可靠性。
该算法也为其他领域的温度效应分析提供了一种新的思路和方法。
在实际工程应用中,可以根据具体的要求进行修改和优化,以满足不同的设计需求。
考虑温度效应的斜齿轮时变啮合刚度解析算法【摘要】本文旨在研究考虑温度效应的斜齿轮时变啮合刚度解析算法。
通过对斜齿轮传动原理进行分析,提出了时变啮合刚度计算方法和考虑温度效应的啮合刚度修正模型。
利用仿真分析探讨了温度对斜齿轮传动性能的影响,并验证了算法的有效性。
研究结果表明,在考虑温度效应的情况下,斜齿轮传动的时变啮合刚度可以更准确地描述实际工况。
本研究也存在局限性,如对温度变化的精确模拟和实验验证尚待完善。
未来的研究方向包括进一步优化算法,提高时变啮合刚度的精度,以及探索更多温度效应对斜齿轮传动的影响,为斜齿轮传动系统设计提供理论支持。
【关键词】斜齿轮、时变啮合刚度、温度效应、解析算法、研究背景、研究目的、研究意义、传动原理、计算方法、修正模型、仿真分析、传动性能、结论、局限性、未来研究方向1. 引言1.1 研究背景斜齿轮传动作为机械传动中常见的形式之一,具有传动效率高、承载能力强等优点,在许多机械设备中都得到广泛应用。
斜齿轮传动的性能直接受到啮合刚度的影响,而啮合刚度则直接决定传动系统的动态特性和工作稳定性。
随着工作条件的改变,尤其是温度的变化,啮合刚度也会发生相应的变化,进而影响传动系统的性能表现。
研究考虑温度效应的斜齿轮时变啮合刚度解析算法具有重要的理论意义和实际应用价值。
1.2 研究目的研究目的是为了探究斜齿轮传动在工作过程中受温度效应影响时的啮合刚度变化规律,为设计和优化斜齿轮传动系统提供理论支撑。
通过分析斜齿轮传动的结构特点和工作原理,了解影响啮合刚度的因素及其变化规律。
进一步探讨考虑温度效应的啮合刚度修正模型的建立和验证方法,为准确预测斜齿轮传动系统在实际工作环境下的性能提供依据。
通过时变啮合刚度的仿真分析,揭示温度效应对斜齿轮传动性能的影响机理,为设计工程师提供参考依据。
最终,通过对考虑温度效应的斜齿轮时变啮合刚度解析算法的有效性进行评价,总结研究成果的局限性,并提出未来研究方向,推动斜齿轮传动系统性能和稳定性的进一步提升。
主动齿轮角位移时变啮合刚度计算公式嘿,这“主动齿轮角位移时变啮合刚度计算公式”听起来是不是有点复杂?其实啊,它就像一个神秘的密码,等着咱们去破解。
先来说说这主动齿轮,它在机械传动中可有着至关重要的地位。
就好比一辆汽车,要是主动齿轮出了问题,那整个动力传输都会受到影响。
我还记得有一次去工厂参观,看到工人们在组装一台大型机器。
其中就有主动齿轮的安装环节,那一个个齿轮严丝合缝地组合在一起,真让人感叹机械的魅力。
当时有个年轻的工人师傅,在计算主动齿轮角位移时变啮合刚度的时候,眉头紧皱,嘴里还念念有词。
我凑过去一看,他面前的图纸上密密麻麻的都是数字和符号。
咱们言归正传,来聊聊这个计算公式。
要理解这个公式,首先得清楚几个关键的概念。
比如说,角位移是啥?简单来说,就是齿轮转动的角度变化。
而时变啮合刚度呢,就是随着时间变化,齿轮啮合时的刚度也在变化。
这个计算公式里,包含了许多参数,像材料的弹性模量、齿轮的齿数、模数等等。
每个参数都有着自己独特的作用,就像一个团队里的每个成员,都不可或缺。
比如说,材料的弹性模量,它决定了齿轮材料的弹性性质。
如果弹性模量越大,说明材料越难变形,那么齿轮的刚度也就相对较大。
再说说齿数和模数,齿数越多,传动就越平稳;模数越大,齿轮的承载能力就越强。
在实际运用中,这个计算公式可重要了。
比如在设计新型的机械传动系统时,通过准确计算主动齿轮角位移时变啮合刚度,能够优化设计,提高传动效率,减少磨损和噪音。
想象一下,如果没有这个精确的计算公式,那机械工程师们就像是在黑暗中摸索,很难设计出高效可靠的传动系统。
而且啊,随着科技的不断发展,对于这个计算公式的研究也在不断深入。
新的材料、新的加工工艺,都可能对公式中的参数产生影响,这就需要我们不断地去探索和改进。
总之,主动齿轮角位移时变啮合刚度计算公式虽然复杂,但它却是机械传动领域中不可或缺的一部分。
就像那个在工厂里认真计算的工人师傅一样,我们需要认真对待每一个参数,每一次计算,才能让机械运转得更加顺畅、高效。
考虑温度效应的斜齿轮时变啮合刚度解析算法斜齿轮机械是一种常见的传动装置,在实际工作中经常会受到温度的影响。
温度变化会引起材料的膨胀和收缩,从而影响斜齿轮的啮合刚度。
为了准确地预测和分析斜齿轮的工作性能,在考虑温度效应的情况下,需要开发一种解析算法。
本文将介绍一种考虑温度效应的斜齿轮时变啮合刚度解析算法。
需要了解斜齿轮的啮合刚度是如何受温度影响的。
斜齿轮的啮合刚度取决于材料的弹性模量和几何参数。
当温度升高时,材料的弹性模量会减小,从而导致啮合刚度的降低。
由于温度的非均匀分布,斜齿轮各部分的温度差异也会引起啮合刚度的变化。
在进行温度效应的时变啮合刚度解析算法时,可以采用有限元法进行建模和求解。
需要确定斜齿轮的几何参数,例如齿数、模数、齿轮厚度等。
然后,根据斜齿轮的材料性质,选择合适的材料模型进行建模。
在考虑温度效应时,需要将材料的弹性模量与温度相关联,通常使用材料的热膨胀系数和参考温度,通过线性或非线性关系表示弹性模量随温度变化的规律。
接下来,需要建立斜齿轮的有限元模型并进行离散化。
通常采用三维模型和六节点六自由度单元进行建模,其中包括6个位移和6个转角自由度。
根据斜齿轮的几何参数,将齿轮的结点和单元进行合理划分,并设置边界条件和加载条件。
在考虑温度效应时,需要在模型中引入温度场,并与材料的热膨胀系数相耦合。
然后,进行时变啮合刚度的求解。
根据斜齿轮的有限元模型,可以利用常见的有限元软件进行求解,如ANSYS、ABAQUS等。
通过施加加载条件,计算出斜齿轮在不同温度下的应力和位移分布。
然后,根据弹性力学理论,计算得到斜齿轮的啮合刚度。
进行结果分析和评估。
根据求解得到的时变啮合刚度,可以对斜齿轮的工作性能进行评估。
可以通过对不同工况和温度变化的分析,优化斜齿轮的设计和工作参数,提高其可靠性和效率。
考虑温度效应的斜齿轮时变啮合刚度解析算法是一种重要的分析方法,可以帮助工程师和设计人员准确地预测和分析斜齿轮的工作性能。
基于改进能量法的行星齿轮时变啮合刚度求解
张慧玲
【期刊名称】《机械传动》
【年(卷),期】2018(42)8
【摘要】时变啮合刚度是研究行星齿轮故障机理的重要参数。
在考虑基圆与齿根圆之间关系的情况下,以齿数为参量,建立了一个改进的悬臂梁模型。
对行星齿轮的各对齿轮啮合的时变啮合刚度进行分情况讨论,在考虑轮体刚度的基础上,应用能量法求解更加准确的轮齿时变啮合刚度。
在该方法的基础上,分别求解太阳轮、行星轮、内齿圈存在裂纹时各对轮齿啮合的时变啮合刚度,并分别探究裂纹深度和裂纹角度对时变啮合刚度的影响。
该研究为掌握行星齿轮故障机理提供了理论帮助。
【总页数】7页(P91-97)
【关键词】行星齿轮;啮合刚度;裂纹;故障激励
【作者】张慧玲
【作者单位】新乡职业技术学院汽车技术系
【正文语种】中文
【中图分类】TH132.41
【相关文献】
1.行星齿轮系统时变啮合刚度研究 [J], 李宽阳;陈彩凤;张亮;胡永安
2.基于改进能量法的直齿轮时变啮合刚度计算 [J], 马辉;逄旭;宋溶泽;杨健
3.基于全齿廓普遍方程的齿轮时变啮合刚度改进算法 [J], 黄金凤;张飞斌;崔玲丽;
陈雄飞
4.基于全齿廓的行星齿轮点蚀故障时变啮合刚度计算模型 [J], 蒋超阳;王衍学;赖俊杰
5.基于有限元法的疲劳点蚀斜齿轮时变啮合刚度分析与试验研究 [J], 李金锴;陈勇;臧立彬;毕旺洋;杨小朋
因版权原因,仅展示原文概要,查看原文内容请购买。
考虑温度效应的斜齿轮时变啮合刚度解析算法斜齿轮是常见的齿轮传动机构,它具有高接触强度、传动效率高、传动比大等优点,被广泛应用于工程领域。
在实际应用过程中,由于温度的变化,斜齿轮的啮合刚度会发生变化,从而影响传动性能和工作稳定性。
考虑温度效应对斜齿轮时变啮合刚度进行解析分析十分重要。
温度对斜齿轮时变啮合刚度的影响主要体现在两个方面:一是材料的热膨胀效应,二是润滑油膜的温度粘度效应。
热膨胀效应会导致齿轮齿距的变化,进而影响齿轮的啮合性能;而温度粘度效应则会改变润滑油膜的厚度和黏滞度,从而改变啮合刚度。
针对斜齿轮时变啮合刚度的解析分析,可以采用下面的步骤:第一步,确定啮合线。
斜齿轮的啮合线是齿形曲线与基圆圆心连线的交点,通过几何计算可以获得啮合线的位置。
第二步,确定各个齿轮的几何参数。
包括模数、齿顶高度、齿根高度、压力角等参数。
这些参数可以根据齿轮的设计要求和实际工况进行确定。
第三步,根据温度变化确定齿距的变化量。
通过材料的热膨胀系数和温度变化情况,可以计算出齿距的变化量。
一般情况下,齿距随温度升高而增大。
第四步,计算啮合刚度。
根据齿轮的几何参数和啮合线确定齿轮的刚度矩阵。
然后,根据各个齿轮之间的相对位移和齿距的变化量,可以计算出时变的啮合刚度。
第五步,考虑润滑油膜的温度粘度效应。
根据温度变化确定润滑油膜的黏滞度,并将其考虑到啮合刚度的计算中。
第六步,验证解析算法的准确性。
可以通过有限元方法进行数值模拟,与解析算法的计算结果进行对比,从而验证解析算法的准确性和可靠性。
考虑温度效应的斜齿轮时变啮合刚度解析算法是一项十分复杂的工作。
在实际应用中,需要综合考虑材料热膨胀效应和润滑油膜的温度粘度效应,进行准确的分析计算。
这对于提高斜齿轮的工作稳定性和传动效率具有重要的意义。
未来的研究中应该进一步深入探究斜齿轮的温度效应,开展更加细致全面的工作。
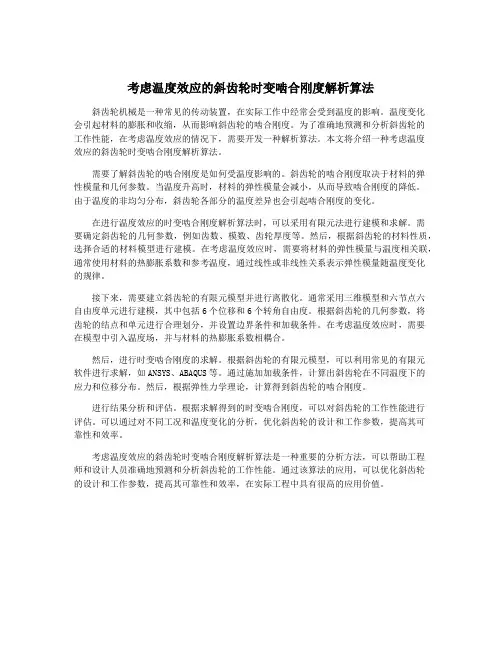
A =2ω0B b n [s i n (θ+σ2T 1)+s i n ω0t ]σ22+ω20ζ2(34)将式(34)代入式(31)得x 0=2B c o s ωt +2ω0B b n [s i n (θ+σ2T 1)+s i n ω0t ]σ22+ω20ζ2+εx 1(35)其中,s i n (θ+σ2T 1)部分是频率极小的刚体部分,可忽略其对系统振动的影响㊂消除久期项后求解式(35),可得其稳态特解㊂由于其形式较为复杂,这里不写出其具体形式㊂当激励频率ω=ω0-ωp +εσ2时,代入算例系统参数,可得系统在组合频率共振下的时域㊁频域响应曲线,如图5所示㊂(a)时域响应曲线(b)频域响应曲线图5 氊=448r a d /s 时系统响应曲线由图5可知,当外加激励频率接近系统固有频率与啮合频率的组合频率时,系统会发生比较强烈的组合共振㊂但与参数振动系统的主共振不同,共振振幅的最大值所对应的为系统固有频率而非激励频率,即主导频率不是激励频率而是系统固有频率,且激励频率及各次组合频率谐波对系统振动的影响可以忽略㊂与常系数线性系统相同,参数振动系统的强迫振动包含其激励频率成分,但由于激励频率远离系统固有频率,所以激励频率所对应的振幅很小㊂虽然组合激励频率远离系统固有频率,但由于啮合刚度的周期性变化仍然导致系统产生较为强烈的共振㊂参数振动系统的组合共振主导频率成分为系统的固有频率,考虑外激励频率变化时的系统组合共振频域响应曲线如图6所示㊂(a )n =1时不同阻尼下的频响曲线(b )σ2=0时不同激励频率下的组合共振振幅图6 不同阻尼情况下的系统频域响应曲线由图6a 可知,随着转子上激励频率的变化,系统组合频率共振的振幅在448.6r a d /s 附近达到最大值,且阻尼对共振振幅有明显的抑制作用㊂由式(35)可知,激励频率接近于ω0-n ωp 组合频率时系统都会产生组合共振,但由图6b 可知,随着谐波次数n 的增大,组合共振的振幅将逐渐趋向于零㊂这主要是由于啮合刚度波动造成的高次谐波幅值b n 将随着谐波次数的增加呈现出减小的趋势所引起㊂同理,当激励频率接近于ω0+nωp 组合频率时,系统也将会产生组合共振,且共振振幅的变化与图6b 相同㊂5 结语机电集成电磁蜗杆传动系统由于啮合磁极数变化,使其具有复杂的动力学特性:(1)系统自由振动包含有固有频率及固有频率与啮合频率的组合频率成分㊂(2)发生主共振时,系统响应中除包含激励频率外,还包含多次组合频率谐波成分,且谐波成分的影响不可忽略㊂(3)发生组合共振时,系统响应中的主导频率为系统固有频率而非激励频率,激励频率及各次组合谐波频率成分的影响可以忽略,且随组合频率谐波次数的增大,系统组合共振振幅迅速减小㊂(下转第2304页)机电集成电磁蜗杆传动系统参数振动响应郝秀红 朱学军 刘 霜一种面齿轮传动时变啮合刚度数值计算方法雷敦财 唐进元中南大学高性能复杂制造国家重点实验室,长沙,410083摘要:准确计算时变啮合刚度是齿轮动力学研究的基础㊂提出了一种面齿轮传动时变啮合刚度数值计算新方法㊂以直齿圆柱齿轮为例,建立合理的有限元模型,得到直齿圆柱齿轮的时变啮合刚度曲线,并将其与I S O 6336方法计算结果进行对比,验证了该啮合刚度计算方法的正确性及有限元模型的精确性㊂应用该数值计算方法,研究面齿轮传动时变啮合刚度变化规律,得到了精确的面齿轮传动时变啮合刚度曲线㊂研究结果为面齿轮传动的动力学分析及设计提供参考㊂关键词:啮合刚度;有限元;面齿轮;传动误差中图分类号:T H 132.4 D O I :10.3969/j.i s s n .1004-132X.2014.17.006AC a l c u l a t i o n M e t h o do fM e s hS t i f f n e s s f o rF a c eG e a rT r a n s m i s s i o nS ys t e m L e i D u n c a i T a n g J i n yu a n S t a t eK e y L a b o r a t o r y o fH i g h ‐p e r f o r m a n c eC o m p l e x M a n u f a c t u r i n g,C e n t r a l S o u t hU n i v e r s i t y ,C h a n gs h a ,H u n a n ,410083A b s t r a c t :An e w m e t h o d f o r c a l c u l a t i n g t h em e s h s t i f f n e s s o f g e a r t r a n s m i s s i o n s ys t e m w h i c hw a s t h e f o u n d a t i o no f g e a rd y n a m i c sa n a l y s i sw a s p r o po s e db a s e do nf i n i t ee l e m e n tm e t h o d .T ov a l i d a t e t h e c a l c u l a t i o nm e t h o d ,a s p u r g e a r p a i rw a s a d o pt e d t o c a l c u l a t e t h em e s h s t i f f n e s s .T h e r e s u l t s s h o w t h a t t h e m e s hs t i f f n e s s i s i d e n t i c a lw i t ht h a tf r o m I S O 6336m e t h o d .S u b s e q u e n t l y ,t h e p r o p o s e d m e t h o dw a s u s e d t o c a l c u l a t e t h em e s h s t i f f n e s s o f f a c e g e a r t r a n s m i s s i o n s y s t e m ,a n d t h e c h a n ge l a w of t h em e s h i ng s t i f f n e s s f o r th e f a c e g e a r t r a n s mi s s i o ns y s t e m w a s r e s e a r c h e d .T h e r e s e a r c hr e s u l t s p r o v i d e t h eb a s i c c o n d i t i o n f o r d y n a m i c s a n a l y s i s a n dd e s i gno f f a c e g e a r t r a n s m i s s i o n .K e yw o r d s :m e s hs t i f f n e s s ;f i n i t e e l e m e n t ;f a c e g e a r ;t r a n s m i s s i o ne r r o r 收稿日期:2013 03 11基金项目:国家重点基础研究发展计划(973计划)资助项目(2011C B 706800);中南大学学位论文创新项目(2011S S X T 095)0 引言作为机械装置中的一个重要零部件,齿轮传动被广泛应用于航空㊁风电㊁汽车等领域㊂随着工作转速的逐步提高,齿轮传动的动力学性能越来越受到设计㊁制造及使用者的重视[1]㊂相比较其他类型的传动系统,齿轮传动系统的主要不同之处在于:它不但会因为外部激励而产生动态响应,同时会因为传动过程中啮合齿对数的改变㊁轮齿的弹性变形及轮齿误差而导致啮合刚度发生变化,从而产生轮齿动态啮合力,且此种由于啮合综合刚度的时变性引起的动态激励是齿轮传动中最主要的动态激励形式之一㊂因此,确定齿轮传动的时变啮合刚度一直是齿轮动力学研究中的重要问题[2‐3]㊂对于圆柱齿轮的啮合刚度计算问题,已有较多的学者进行过深入研究,得到了一些比较成熟的计算方法[4‐5]㊂对于面齿轮及螺旋锥齿轮等结构相对复杂的齿轮传动形式的啮合刚度计算问题,由于其齿面为复杂曲面,要准确计算时变啮合刚度存在较大难度,因此相关研究文献较少㊂G o s s e l i n 等[6]基于有限条法给出了计算螺旋锥齿轮刚度的方法,但也只得到了沿齿高和齿长方向的位移曲线,并没有得到刚度曲线㊂M e n n e m等[7]使用有限单元法计算了不同载荷下轮齿接触柔度,获得了时变刚度㊂面齿轮传动是近二十年才真正发展起来的一种主要用于航空领域的齿轮传动形式[8‐12],针对其啮合刚度的计算方法,目前尚未见文献报道㊂在面齿轮的动力学研究中,齿轮啮合刚度都采用经过傅里叶变换后的一次正余弦函数来近似,与实际啮合刚度存在比较大的差异㊂有学者研究发现,采用近似时变啮合刚度得到的系统动态因子比采用实际啮合刚度时大,而且不能有效地得到系统在低频阶段的动态响应㊂因此,采用近似时变啮合刚度来拟合实际啮合刚度研究齿轮传动系统动力学行为,并不能正确反映齿轮系统的动态特性㊂本文提出了一种新的齿轮传动时变啮合刚度数值计算方法㊂首先以直齿圆柱齿轮为例,建立合理的有限元模型,得到直齿圆柱齿轮时变啮合刚度曲线,并与I S O 6336[13]方法计算结果进行对比,说明该啮合刚度计算方法的正确性及有限元模型的精确性;然后应用该啮合刚度计算方法,研究面齿轮传动时变啮合刚度变化规律,得到精确的面齿轮传动时变啮合刚度曲线㊂研究结果为面齿轮传动的动力学分析及设计提供参考㊂中国机械工程第25卷第17期2014年9月上半月1 齿轮传动啮合刚度计算方法在齿轮运转过程中,轮齿之间的啮合作用可以简化为一个在啮合线方向上的时变弹簧,弹簧刚度等于该时刻的啮合刚度,如图1所示㊂图中,图1 啮合刚度示意图ω为主动轮转速,R b p ㊁R b g 分别为主从动轮基圆半径,K m 为啮合刚度,T 为负载扭矩,L O A (l i n e o f a c t i o n )表示啮合线㊂齿轮啮合刚度的一般表达式为K n =F n /δn(1)其中,F n 为法向接触力;δn 为法向综合弹性变形,它应包括由于局部赫兹接触产生的接触弹性变形量δH ㊁轮齿弯曲产生的接触位置的位移δF ㊁轮毂变形产生的接触位置的位移δR ㊁轴和支撑结构变形对接触点位置的影响量δA ㊂由于考虑轴㊁轴承及支撑结构变形会使问题过于复杂,故本文暂只考虑δH ㊁δF 及δR ,因此可以得到δn =∑pi =1δH i+∑p i =1δF i +∑pi =1δR i(2)在齿轮传动过程中,由于轮齿受载变形及齿轮误差,从动轮转动位置会偏离其不考虑受载变形及齿轮误差时所应处的理想转动位置㊂齿轮传递误差e T在1958年被H a r r i s 定义为 从动轮实际转动位移与理想转动位移之差”[14],如图2所示,其一般表达式为e T =θg -z pz gθp (3)式中,θp ㊁θg 分别为主从动轮转角;z p ㊁z g 分别为主从动轮齿数㊂假设齿轮没有承受载荷,此时轮齿没有弹性变形,但是由于轮齿误差的存在,依旧会产生无负载传递误差e N L T㊂在齿轮传动的加载接触分析中,由于存在几何模型误差㊁有限元网格划分产生的几何误差以及网格划分产生的尺侧间隙,故无负载传递误差是不可避免的㊂无负载传递误差导致齿轮啮合过程中轮齿产生刚性位移,该位移在计算轮齿受载变形时必须减除㊂同时,为了方便理解,将传递误差转换成啮合线方向上的位移,因此可以得到齿轮副在一定负载下的受载传递误差e L T一般表达式:e L T (θp ,T )=R b g (θg -z pz gθp )(4)图2 传递误差计算示意图由此可以得到轮齿啮合过程中综合弹性变形δn =e L T (θp ,T )-e N L T(5)故而,齿轮啮合刚度计算的一般表达式为K m =TR b g δn(6)2 啮合刚度数值计算方法验证由于结构的复杂性,面齿轮传动啮合刚度计算方法目前尚未见相关文献报道㊂为了说明上述啮合刚度计算方法的正确性及有限元模型的精确性,本文先以直齿圆柱齿轮为例进行计算,并将其与I S O 6336:2006方法的计算结果进行对比㊂2.1 有限元建模基于唐进元等[15]提出的齿轮虚拟加工制造方法,采用表1所示齿轮传动参数,得到高精度的直齿圆柱齿轮三维几何装配模型㊂表1 直齿圆柱齿轮几何参数小轮齿数25大轮齿数33模数(mm )4.0压力角(°)25齿宽(mm )28齿顶高系数1.0齿根高系数1.25刀具齿顶圆角半径(mm )1.2为了节约计算成本,忽略轴及轴承等支撑结构的影响㊂鉴于静力学分析中质量分布不会影响分析结果,因此在模型中仅考虑可能产生啮合的5对轮齿,其他部分简化为一个轮缘圆柱,并分别在大小轮内孔面与其对应旋转轴线上的参考点之间建立刚性耦合约束,在大轮耦合节点施加负载扭矩,在小轮耦合节点施加转动位移,以此来模拟小轮通过与大轮啮合抵消大轮反抗扭矩带动大轮运转的实际工况,边界条件如图3所示㊂对可能发生接触的5对轮齿进行局部网格细化,齿厚方一种面齿轮传动时变啮合刚度数值计算方法雷敦财 唐进元向最小网格尺寸为0.037mm ,齿高方向最小网格尺寸为0.142mm ,总节点数为180462,总单元数为158592㊂网格模型如图4所示㊂图3圆柱齿轮模型边界条件示意图图4 圆柱齿轮模型网格划分将大轮及小轮的工作齿面定义为接触对,暂不考虑摩擦对啮合刚度的影响㊂采用隐式静力学分析算法,输出接触力及大小轮的绕自身旋转轴线的旋转位移历程曲线㊂2.2 直齿圆柱齿轮啮合刚度计算理论上,标准渐开线齿轮的静态传递误差为零,但考虑到有限元模型不可避免地存在网格划分带来的几何误差,且有限元分析时必须要有完整的边界约束条件,因此,本文近似以大轮负载为13.2N ㊃m 时的传递误差作为无负载传递误差,该负载与额定负载660N ㊃m 相比较小,产生的轮齿接触变形及弯曲变形可以忽略不计㊂基于上述齿轮传动啮合刚度计算方法,计算得到该齿轮副时变啮合刚度曲线,并与I S O 6336:2006给出的计算公式得到的结果进行对比,如图5所示㊂图5 啮合刚度对比图由图5可知,所提出的方法得到的时变啮合刚度曲线与I S O 6336:2006方法计算结果相比,平均值相对误差为5.86%㊂因此可以证明所提出的齿轮传动时变啮合刚度计算方法的正确性,同时说明有限元模型已足够精确㊂3 面齿轮传动啮合刚度数值计算3.1 有限元模型面齿轮传动几何参数如表2所示,其中面齿轮轮缘系数定义为面齿轮轮齿高度与面齿轮齿根平面到面齿轮齿底平面之间距离的比值㊂表2 面齿轮传动几何参数小轮齿数19面齿轮齿数73插齿刀齿数21模数(mm )4.5压力角(°)20面齿轮齿宽(mm )29.4小轮齿宽(mm )30.0刀具齿顶高系数1.25刀具齿根高系数1.0面齿轮轮缘系数3.14 采用上述有限元建模方法,将可能发生接触的5对轮齿之外的部分简化为一个阶梯圆柱,忽略轴及轴承等支撑结构变形对面齿轮传动接触位置的影响,在小轮内孔面与位于其旋转轴线上的参考节点之间建立刚性耦合约束,在面齿轮与位于其旋转轴线上的参考节点之间建立刚性耦合约束,即将轴及轴承简化为刚性支撑,在小轮参考节点施加旋转位移,在面齿轮参考节点施加负载扭矩,以模拟小轮通过与大轮啮合作用带动大轮抵消负载扭矩而运转的实际工况,边界条件设置如图6所示㊂图6 面齿轮模型边界条件示意图中国机械工程第25卷第17期2014年9月上半月对于未修形的直齿面齿轮传动而言,面齿轮由齿顶进入啮合,由齿根退出啮合,其理论接触轨迹在齿高方向大致呈一条竖直线㊂经齿轮接触分析得到,该对齿轮理论接触轨迹大致位于半径为164.4mm 处,因此对面齿轮靠近内端的一半轮齿及配对小轮对应啮合位置进行网格细化,其网格密度与上述直齿圆柱齿轮模型中细化部分网格密度基本一致,总节点数为242312,总单元数为201420,网格模型如图7所示㊂接触定义㊁材料参数及分析步设置与上述直齿圆柱齿轮有限元模型保持一致㊂此时对于单个面齿轮轮齿而言,约有54个计算点㊂图7 面齿轮模型网格模型3.2 面齿轮传动啮合刚度数值计算采用上述有限元模型,在大轮额定载荷为1536.8N ㊃m 条件下,取负载为38.42N ㊃m 时的传递误差为无负载传递误差㊂额定载荷作用下各齿对法向接触力历程曲线如图8所示㊂由图8可知,该对齿轮副存在双齿接触区(D T )及三齿接触区(T T ),并且,由于在三齿接触区时前一对轮齿即将退出啮合,后一对轮齿刚刚进入啮合,齿间载荷分布非常不均匀,因此该对轮齿法向接触力最大值出现在该啮合区域㊂图8 法向接触力历程曲线(T =1536.8N ㊃m )进一步根据式(6)计算得到面齿轮传动时变啮合刚度曲线,如图9所示㊂由图9可以看出,面齿轮传动时变啮合刚度曲线类似于一条正弦曲线,呈现明显的周期特征,其最小值大致出现在三齿接触区内前后两对轮齿受载相同的位置(图8中点A 处)㊂此时该两对轮齿约各承担总载荷的6.44%,中间一对轮齿约承担总载荷的87.15%,齿间载荷的分布非常不均匀,并且此时前后两对轮齿分别在靠近齿根及齿顶位置接触,因此该啮合位置齿轮副弹性综合变形最大,啮合刚度最小㊂啮合刚度最大值出现在双齿啮合区内参与啮合的两对轮齿受载相同的位置(图8中点B 处),此时该两对轮齿各承担总载荷的50%,载荷分布最为均匀,因此该啮合位置齿轮弹性综合变形最小,啮合刚度最大㊂图9 时变啮合刚度曲线(T =1536.8N ㊃m )4 结论(1)提出了一种新的齿轮传动时变啮合刚度数值计算方法,并给出了相应的加载接触分析有限元建模方法㊂(2)以直齿圆柱齿轮为例,采用该方法得到该齿轮副时变啮合刚度曲线,与I S O 6336方法计算结果相对比,验证了上述方法的正确性及所建有限元模型的精确性㊂(3)应用该啮合刚度数值计算方法得到了面齿轮传动载荷分布规律及时变啮合刚度曲线㊂参考文献:[1] F e r n a n d e zRA ,V i a d e r oF ,I gl e s i a sM ,e t a l .A M o d e l f o r t h e S t u d y o fM e s h i n g S t i f f n e s s i nS p u rG e a rT r a n s -m i s s i o n s [J ].M e c h a n i s ma n d M a c h i n eT h e o r y,2013,61:30‐58.[2] C h e nS i y u ,T a n g J i u y u a n ,L u oC a i w a n g.E f f e c t s o f t h eG e a rT o o t h M o d i f i c a t i o no nt h e N o n l i n e a rD y -n a m i c s o fG e a rT r a n s m i s s i o nS y s t e m [J ].A d v a n c e d M a t e r i a l sR e s e a r c h ,2010,97:2764‐2769.[3] C h e nS i y u ,T a n g J i u y u a n ,L u oC a i w a n g,e t a l .N o n l i n e a r D y n a m i cC h a r a c t e r i s t i c so fG e a r e dR o t o rB e a r i n g S y s -t e m sw i t hD y n a m i cB a c k l a s ha n dF r i c t i o n [J ].M e c h a -n i s ma n dM a c h i n eT h e o r y ,2011,46(4):466‐478.[4] Z h a n g J ,E s a t I ,S h iY.L o a d A n a l y s i sw i t h V a r -y i n g M e s hS t i f f n e s s [J ].C o m pu t e r s &S t r u c t u r e s ,1999,70(3):273‐80.[5] P i m s a r n M ,K a z e r o u n i a nK.E f f i c i e n tE v a l u a t i o no fS p u rG e a rT o o t hM e s hL o a dU s i n g P s e u d o ‐i n t e r f e r -e n c eS t if f n e s sE s t i m a t i o n M e t h o d [J ].M e c h a n i s m a n d M a c h i n eT h e o r y,2002,37(8):769‐786.一种面齿轮传动时变啮合刚度数值计算方法雷敦财 唐进元。
考虑温度效应的斜齿轮时变啮合刚度解析算法随着机械冲击和振动的不断增加,斜齿轮的动态响应和啮合刚度评估变得越来越重要。
由于斜齿轮啮合刚度是动态响应的关键参数,因此它的准确性直接影响到系统的性能和寿命。
然而,在实际应用中,由于温度的变化和滑动效应,斜齿轮的啮合刚度经常发生变化,这不利于预测和控制机械系统的动态响应。
要解决这个问题,需要一个考虑温度效应的斜齿轮时变啮合刚度解析算法。
这个算法需要综合考虑轮齿表面接触面积的变化、弹性变形的影响、温度的影响、滑动效应等多个因素,以获得更加精确的啮合刚度预测结果。
算法的基本思路是通过建立与实际相符的斜齿轮啮合模型,以确定啮合刚度与时间、温度和其他因素之间的关系。
这个模型应该考虑轮齿的尺寸、材料、表面质量、啮合点位置等因素,以确保得到准确的模拟结果。
模型的建立可以采用有限元方法或解析方法。
有限元法可以用来模拟轮齿的弹性变形和接触面积的变化,从而计算出啮合刚度的值。
解析方法则可以通过建立轮齿表面的接触压力分布来计算啮合刚度。
两种方法都需要将温度因素考虑进去。
温度的影响可以通过考虑热胀冷缩和热传导等因素来模拟。
在模拟过程中,应该考虑轮齿和工作环境的温度变化,以及轮齿表面和内部温度的梯度。
滑动效应是另一个需要考虑的因素。
在实际工作中,斜齿轮的表面不仅存在接触,还存在滑动,这使得啮合刚度的计算变得更加复杂。
为了解决这个问题,可以采用现有的材料摩擦学理论或其他方法进行分析。
综合考虑各种因素后,可以用数值方法或试验方法验证模型的准确性。
如果模型与实际情况相符,就可以用它来进行斜齿轮的啮合刚度分析和动态响应预测。
考虑温度效应的斜齿轮时变啮合刚度解析算法在实际工作中,斜齿轮传动系统在长时间运行过程中,由于传动部件材料的热膨胀和工作环境温度的影响,会出现温度变化。
这种温度变化会导致传动部件的尺寸和性能发生变化,从而对传动系统的工作性能产生影响。
特别是对于斜齿轮传动系统中的时变啮合刚度来说,温度的变化会直接影响到啮合刚度的大小和分布,进而影响到整个传动系统的工作精度和稳定性。
由于温度对斜齿轮传动系统的影响十分复杂,造成的问题也十分严重。
如何对斜齿轮时变啮合刚度进行准确的解析和计算成为了当前研究的热点之一。
针对此问题,一些学者提出了一些解析算法来考虑温度效应的斜齿轮时变啮合刚度,以提高斜齿轮传动系统的工作性能。
要考虑斜齿轮传动系统在不同温度下的尺寸变化和材料性能变化。
随着温度的升高,传动零部件的尺寸会发生变化,而材料的性能也会发生变化。
这些变化将直接影响到斜齿轮传动系统的结构和工作性能。
要对传动零件在不同温度下的尺寸变化和材料性能变化进行准确的分析和计算,并将其考虑到时变啮合刚度的解析算法中。
对于斜齿轮传动系统的结构参数和工作状态进行准确的建模和仿真分析。
在考虑温度效应的斜齿轮时变啮合刚度解析算法中,需要对传动系统的结构参数和工作状态进行准确的建模和仿真分析。
通过建立精确的模型来描述斜齿轮传动系统在不同温度下的工作状态,可以更好地考虑到温度效应对啮合刚度的影响,从而提高解析算法的准确性和可靠性。
通过实验验证和仿真分析来验证解析算法的有效性。
在考虑温度效应的斜齿轮时变啮合刚度解析算法中,需要通过实验验证和仿真分析来验证算法的有效性。
通过对不同温度下的斜齿轮传动系统进行实际测试和仿真分析,可以验证解析算法对温度效应的考虑是否准确,并进一步改进算法的精度和可靠性。