第三章光学惯性测量装置
- 格式:ppt
- 大小:8.10 MB
- 文档页数:75
imu和odo的工作原理标题:IMU和ODO的工作原理探究引言:惯性测量单元(IMU)和轮式里程计(ODO)是现代导航系统中常用的传感器装置,它们在定位、导航和姿态控制等方面发挥着重要的作用。
本文将详细介绍IMU和ODO的工作原理,包括其原理、结构和应用。
通过深入了解IMU和ODO,我们可以更好地理解这些技术的优点和局限性,并为未来的导航系统设计和发展提供指导。
第一部分:IMU的工作原理1.1 加速度计加速度计是IMU中的重要组成部分,它通过测量物体的加速度来确定其运动状态。
加速度计基于牛顿第二定律,通过测量物体在三个轴向上的加速度来推断物体的位移。
常见的加速度计主要包括压电和微机电系统(MEMS)传感器。
压电加速度计使用压电材料产生电荷,而MEMS加速度计则利用微机电系统的微小结构测量变形来判断加速度变化。
1.2 陀螺仪陀螺仪是IMU中另一个重要的传感器,它通过测量物体在旋转方向上的角速度来确定其姿态变化。
陀螺仪根据角动量守恒定律,通过测量物体在三个轴向的旋转角速度来计算物体的姿态。
常见的陀螺仪主要包括机械陀螺仪和MEMS陀螺仪。
机械陀螺仪利用陀螺效应实现测量,而MEMS陀螺仪使用微小结构对角速度进行测量。
1.3 磁力计磁力计是IMU中的另一个重要传感器,它通过测量地磁场的变化来确定物体的方向。
磁力计利用霍尔效应或磁电阻效应测量物体周围的磁场强度,并通过与地磁场进行比较来确定物体的方向。
由于磁场受到外界干扰较大(如电气设备和金属结构等),磁力计常常与加速度计和陀螺仪结合使用,以提高方向测量的准确性。
第二部分:ODO的工作原理2.1 轮子编码器轮子编码器是ODO中的核心传感器,它通过对轮子旋转的测量来计算物体的位移。
轮子编码器通常由光学编码器或磁编码器组成。
光学编码器利用光学读取单元和编码盘上的刻线进行测量,而磁编码器则利用磁性读取单元和磁性编码盘进行测量。
轮子编码器可以准确地测量轮子的旋转次数和方向,进而计算出物体的位移。
imu 光纤陀螺关系imu 光纤陀螺关系imu 简介•imu (Inertial Measurement Unit)是指惯性测量单元,是一种集成了加速度计、陀螺仪和磁力计等多种惯性传感器的装置。
光纤陀螺简介•光纤陀螺(Fiber Optic Gyroscope)是一种利用光学效应测量旋转角速度的装置,其原理基于Sagnac效应。
imu 和光纤陀螺的关系•imu 和光纤陀螺都是用于测量物体的角速度的装置,但其原理和工作方式有所不同。
imu 的原理1.加速度计通过测量物体的加速度来计算出物体的角速度。
2.陀螺仪通过测量物体绕着特定轴线旋转时的力矩来计算出物体的角速度。
3.磁力计通过测量物体周围的磁场来计算出物体的方向。
光纤陀螺的原理1.光纤陀螺利用了光在光纤中的传播速度和方向的特性,通过测量光信号的干涉效应来计算出物体的角速度。
2.光纤陀螺使用一个环形的光纤来形成光路,光信号在光纤中传播时会因为物体的旋转而发生位移,从而产生光信号的干涉效应。
3.通过测量干涉效应的变化,可以计算出物体绕特定轴线旋转的角速度。
imu 和光纤陀螺的应用领域•imu 在航空航天、导航、机器人、虚拟现实等领域有广泛应用,可以提供姿态测量、运动跟踪等功能。
•光纤陀螺主要应用于惯性导航、地质勘探、航空航天等领域,可以提供高精度的角速度测量。
结论•imu 和光纤陀螺都是用于测量物体的角速度的装置,但其原理和工作方式不同。
•imu 主要通过加速度计、陀螺仪和磁力计等传感器来测量角速度。
•光纤陀螺则利用光纤的干涉效应来测量角速度。
•这两种装置在航空航天、导航、机器人等领域具有重要的应用价值。
imu 和光纤陀螺的优缺点比较imu 的优点•成本较低,较为常见且易于获取。
•可以同时测量加速度和角速度,提供更全面的运动信息。
•适用于一般精度要求的应用,如姿态解算、运动跟踪等。
imu 的缺点•精度相对较低,受到器件的噪声和漂移等影响。
•需要进行校准和陀螺仪漂移补偿,以保持高精度。
IMU惯性测量单元【IMU惯性测量单元简单介绍】(英文:Inertial measurement unit,简称IMU)是测量物体三轴姿态角(或角速率)以及加速度的装置。
一般的,一个IMU包含了三个单轴的加速度计和三个单轴的陀螺,加速度计检测物体在载体坐标系统独立三轴的加速度信号,而陀螺检测载体相对于导航坐标系的角速度信号,测量物体在三维空间中的角速度和加速度,并以此解算出物体的姿态。
在导航中用着很重要的应用价值。
为了提高可靠性,还可以为每个轴配备更多的传感器。
一般而言IMU要安装在被测物体的重心上。
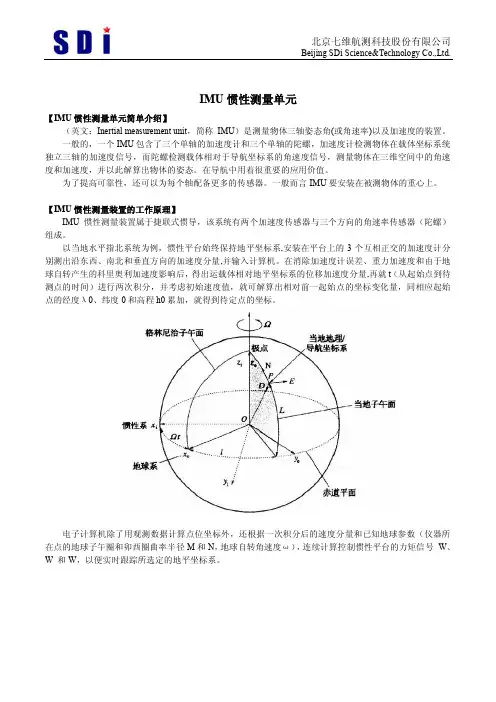
【IMU惯性测量装置的工作原理】IMU惯性测量装置属于捷联式惯导,该系统有两个加速度传感器与三个方向的角速率传感器(陀螺)组成。
以当地水平指北系统为例,惯性平台始终保持地平坐标系,安装在平台上的3个互相正交的加速度计分别测出沿东西、南北和垂直方向的加速度分量,并输入计算机。
在消除加速度计误差、重力加速度和由于地球自转产生的科里奥利加速度影响后,得出运载体相对地平坐标系的位移加速度分量,再就t(从起始点到待测点的时间)进行两次积分,并考虑初始速度值,就可解算出相对前一起始点的坐标变化量,同相应起始点的经度λ0、纬度0和高程h0累加,就得到待定点的坐标。
电子计算机除了用观测数据计算点位坐标外,还根据一次积分后的速度分量和已知地球参数(仪器所在点的地球子午圈和卯酉圈曲率半径M和N,地球自转角速度ω),连续计算控制惯性平台的力矩信号W、W 和W,以便实时跟踪所选定的地平坐标系。
垂直加速度计的输出信号,实际是运载体垂直加速度与当地的重力加速度之和。
当运载体停止时,它的垂直加速度为零,这时从中消除非重力加速度之后,就得到当地的重力加速度。
运载体在运动过程中,由计算机通过陀螺仪控制惯性平台,不断地按参考椭球面的曲率进动。
由于加速度计误差、陀螺仪漂移和垂线偏差变化等因素的影响,运载体到达待测点停止时,平台将不平行于当地水平面,两个水平加速度计的输出不等于零。

文章编号:1671-637X(2007)03-0045-03惯性技术在精确制导武器中的应用与发展鲁 浩1,2, 位晓峰2, 庞秀枝2(1.北京航空航天大学,北京 100083; 2.中国空空导弹研究院,河南洛阳 471009)摘 要: 探讨了惯性技术在精确制导武器中的应用与发展,给出了战术武器对惯性技术的要求,对国外惯性技术的现状和发展趋势进行了分析,对国内惯性技术的研究方向进行了展望。
关 键 词: 武器; 精确制导; 导航战; 惯性技术中图分类号: V249.3 文献标识码: A Appli ca ti on of i n erti a l technology i n Prec isi onGu i ded M un iti on sLU Hao1,2, W E I Xiao-feng2, P ANG Xiu-zhi2(1.B eijing U niversity of A eronautics&A stronautics,B eijing100083,China;2.China A irborne M issile A cade m y,L uoyang471009,China)Abstract: The app licati on of inertial technol ogy in Precisi on Guided Muniti ons(PG M)and its devel op2 ment are discussed.The de mands of tactical weapons t o inertial technol ogy are p resented.The current conditi on and future devel opment directi on of inertial technol ogy in foreign countries are analyzed,and the devel opment of domestic inertial techniques is als o studied.Key words: weapon; p recisi on guidance; navigati on war; inertial technol ogy1 惯性技术在精确制导武器中的地位惯性技术是武器系统定向导航的关键技术。

测绘航空摄影考点解析测绘航空摄影考点解析⼀、胶⽚航摄仪1. 航摄仪的结构单镜头分幅摄影机是⽬前应⽤较多的航空摄影机,它装有低畸变透镜。
透镜中⼼与胶⽚⾯有固定⽽精确的距离,称为I摄影机主距。
胶⽚幅⾯的⼤⼩通常是边长为230mm勺正⽅形:胶⽚暗盒能存放长达152M的胶⽚。
摄影机的快门每启动⼀次可拍摄⼀幅影像,故⼜称为框幅式摄影机。
单镜头框幅式胶⽚航空摄影机主要由镜筒、机⾝和暗盒三部分组成。
框幅式胶⽚航空摄影机分类:位于承⽚框四边中央的为齿状的机械框标;位于承⽚框四⾓的为光学框标。
新型的航空摄影机均兼有光学框标和机械框标。
框幅式航空摄影属于| (中⼼)投影成像|。
2 ?航摄仪的分类航空摄影机通常根据其主距或像场⾓的⼤⼩进⾏分类(1)根据摄影机主距F值的不同,航空航摄机可分为长焦距、中焦距和短焦距3种;(2L根据像场⾓的⼤⼩,航空摄影机可分为常⾓、宽⾓和特宽⾓3种。
像⽚上投影差的⼤⼩以及摄影基⾼⽐对⾼程测定精度,⼀般情况下,对于⼤⽐例尺单像测图(如正射影像制作),应选⽤常⾓或窄⾓航摄机;对于⽴体测图,则应选⽤宽⾓或特宽⾓航摄机。
3、感光材料及其特性摄影过程中已曝光的感光⽚必须经过摄影处理(冲洗),才能将已曝光的感光⽚转变成⼀张负像底⽚。
航摄胶⽚的冲洗主要包括显影、定影、⽔洗、⼲燥等过程。
4、航摄仪的辅助设备1 )?为了尽可能消除空中蒙雾亮度的影响,提⾼航空景物的反差,需要加⼊航摄滤光⽚辅助设备2 )?为了补偿像移的影响,在测图航摄仪中需增加影像位移补偿装置。
3)?为了测定景物的亮度,并根据安置的航摄胶⽚感光度,⾃动调整光圈或曝光时间。
需要加⼊航摄仪⾃动曝光系统4)?常⽤的两种胶⽚航摄仪我国现⾏使⽤的框幅式胶⽚航空摄影仪主要有RC型航摄仪和RMt型航摄仪两种RC-10和RC-20的光学系统基本上是相同的,后者具有像移补偿装置新⼀代的RC-30航空摄影系统组成:RC-30航摄仪、陀螺稳定平台和飞⾏管理系统组戌,功能:像移补偿装置、⾃动曝光控制设备, GPS辅助导航的航空摄影。
光纤陀螺仪的原理及应用光纤陀螺仪(Fiber Optic Gyroscope,FOG)是一种基于光学原理的精密惯性测量装置,用于测量和监测旋转运动。
它利用光纤的传输特性和Sagnac效应实现测量旋转运动的原理。
光纤陀螺仪的原理是基于Sagnac效应。
Sagnac效应是20世纪初法国物理学家Sagnac发现的一种光学现象,它是由于光在旋转系统中传播时,相对于旋转系统固连的坐标系,光沿顺时针和逆时针方向传播所需的时间不同而导致的。
光纤陀螺仪利用这个效应,通过测量光在光纤中的传播时间差来推测出旋转系统的旋转信息。
光纤陀螺仪的基本结构包括光源模块、光纤环和检测模块,其中光纤环是光纤陀螺仪的关键部件。
光纤环是由一个光纤来回缠绕而成的环形结构,通过环形的光纤路径,光可以顺时针和逆时针两个方向传播。
当光纤环不发生旋转时,两束光沿相同路径传播,其光程差为零;而当光纤环发生旋转时,两束光会在循环路线上产生不同程度的光程差,其大小与旋转角速度和环形光纤长度有关。
光纤陀螺仪通过光纤环中的相位差来测量旋转运动。
光纤陀螺仪通过向光纤环中注入一束激光光束,并分成顺时针和逆时针两个传输方向,经过一段一致长度的光纤后再汇合,再通过光探测器对两束光信号进行比较,并检测出相位差。
应用方面,光纤陀螺仪具有广泛的应用领域:1. 惯性导航系统:光纤陀螺仪广泛应用于航天、航海、军事等领域中的惯性导航系统中,用于测量航天器、舰船或导弹的姿态、角速度和角加速度,实现精确导航和定位。
2. 地震预警:光纤陀螺仪可以用于测量地震、地壳运动和地球自转等地球物理学参数,通过分析和监测这些数据,可以提前预警地震活动,为地震防灾提供重要信息。
3. 石油勘探:光纤陀螺仪可以应用于石油勘探领域,用于测量地下油田的地质构造、井筒位置和地震勘探过程中的旋转运动等参数,提高勘探效果和资源利用率。
4. 智能车辆导航系统:光纤陀螺仪可以用于智能车辆导航系统中,用于测量车辆的姿态和旋转运动,提供准确的车辆导航和行驶方向。
动作捕捉浅析(一)——惯性动作捕捉一、理论概述:动作捕捉英文Motion capture,简称Mocap。
技术涉及尺寸测量、物理空间里物体的定位及方位测定等方面可以由计算机直接理解处理的数据。
在运动物体的关键部位设置跟踪器,由Motion capture系统捕捉跟踪器位置,再经过计算机处理后向得到三维空间爱你坐标的数据。
当数据被计算机识别后,可以应用在动画制作,步态分析,生物力学,人机工程等领域。
常用的运动捕捉技术从原理上说可分为惯性、光学式、声学式、电磁式。
不同原理的设备各有其优缺点,一般可从以下几个方面进行评价:定位精度;实时性;使用方便程度;可捕捉运动范围大小;抗干扰性;多目标捕捉能力;以及与相应领域专业分析软件连接程度。
惯性式:主要工作原理是跟在人的身上主要的关键点绑定惯性陀螺仪,分析陀螺仪的位移变差来判定人的动作幅度和距离;光学式:光学式运动捕捉通过对目标上特定光点的监视和跟踪来完成运动捕捉的任务。
目前常见的光学式运动捕捉大多基于计算机视觉原理。
从理论上说,对于空间中的一个点,只要它能同时为两部相机所见,则根据同一时刻两部相机所拍摄的图像和相机参数,可以确定这一时刻该点在空间中的位置。
当相机以足够高的速率连续拍摄时,从图像序列中就可以得到该点的运动轨迹;声学式:常用的声学式运动捕捉装置由发送器、接收器和处理单元组成。
发送器是一个固定的超声波发生器,接收器一般由呈三角形排列的三个超声探头组成。
通过测量声波从发送器到接收器的时间或者相位差,系统可以计算并确定接收器的位置和方向。
Logitech、SAC等公司都生产超声波运动捕捉设备;电磁式:电磁式运动捕捉系统是目前比较常用的运动捕捉设备。
一般由发射源、接收传感器和数据处理单元组成。
发射源在空间产生按一定时空规律分布的电磁场;接收传感器(通常有10~20个)安置在表演者身体的关键位置,随着表演者的动作在电磁场中运动,通过电缆或无线方式与数据处理单元相连。
传感器在车辆智能驾驶中的应用第一章传感器简介传感器是一种将物理量转换为电信号或其他可观测现象的装置,可以感知周围环境并将感知到的信息传送给控制系统。
传感器是车辆智能驾驶的核心组件,通过精确的测量和传输数据,实现车辆对周围环境的感知和自主操作。
常见的车辆传感器有惯性传感器、光学传感器、声学传感器、温度传感器、湿度传感器等,下面将针对这些传感器进行详细介绍。
第二章惯性传感器惯性传感器是衡量车辆点位在空间中分布的基本设备,主要由陀螺仪和加速度计构成。
通过收集车辆加速度、转弯和倾斜等数据,实现车辆姿态信息的传递和处理。
惯性传感器广泛应用在自动驾驶系统中,可以实现精确的导航和定位功能。
此外,惯性传感器还可以通过采集车辆速度和加速度等数据,用于实现自适应巡航控制和自动制动系统。
第三章光学传感器光学传感器可以通过采集环境光线反射、透射信息,实现车辆对周围物体的识别和跟踪。
常见的光学传感器包括摄像头和激光雷达。
摄像头主要用于采集车辆前方的图像信息,可以通过对图像信息进行处理,实现辅助驾驶、人脸识别和车辆安全监控等功能。
激光雷达可以通过探测周围物体的位置和距离信息,实现在恶劣天气和复杂路面条件下的环境感知和避障功能。
第四章声学传感器声学传感器是一种利用声波进行测量和检测的装置,能够通过采集车辆周围的声音信号,获取环境中物体的位置、大小和速度等信息。
常见的声学传感器包括麦克风、超声波传感器和声纳。
麦克风主要用于采集车内语音指令和车辆周围的声音信息,实现语音识别和环境噪声控制。
超声波传感器主要用于实现车辆倒车雷达和智能泊车等功能。
声纳主要用于水下探测和定位。
第五章温湿度传感器温湿度传感器是一种用于测量空气温度和湿度的装置,可用于车内环境监测和控制。
常见的温湿度传感器主要包括热电偶和电容式湿度传感器。
热电偶主要通过测量环境的温度变化,实现车内温度控制和空调自动化调节。
电容式湿度传感器主要通过测量空气中的水气含量,实现车内湿度控制和空气质量监测。
惯性传感器工作原理
惯性传感器是一种用于测量和监测物体运动状态的装置。
它通过测量物体的加速度和角速度来推断物体的运动情况。
惯性传感器的工作原理基于牛顿第一和第二定律。
根据牛顿第一定律,物体如果受到外力作用时,将产生加速度;根据牛顿第二定律,加速度与物体所受的作用力成正比,与物体的质量成反比。
惯性传感器通常由加速度计和陀螺仪组成。
加速度计通过测量物体在三个方向上的线性加速度来确定物体的加速度。
它使用微电子机械系统(MEMS)技术,其中包含微小的质量块和微弹簧。
当物体发生加速度时,微小的质量块会相对微弹簧产生位移,该位移由感测器检测到并转换为电信号。
陀螺仪通过测量物体围绕轴线旋转的角速度来确定物体的旋转状态。
陀螺仪中包含一个旋转部件,如旋转质量块或光学陀螺。
当物体发生旋转时,旋转部件会感应到惯性力,并将其转换为电信号。
惯性传感器还可以通过将加速度计和陀螺仪的测量结果进行整合和处理,来估计物体的位置和姿态。
这可以通过数学算法,如卡尔曼滤波器或互补滤波器来实现,以提高测量结果的准确性和稳定性。
总之,惯性传感器通过测量和监测物体的加速度和角速度来推断物体的运动情况。
它的工作原理基于牛顿定律,并利用加速
度计和陀螺仪进行测量和转换。
通过整合和处理这些测量结果,惯性传感器可以提供物体的位置和姿态信息。
惯性测量系统惯性测量系统:由加速度计和陀螺平台等惯性器件组成的用于测定载体空间位置、姿态和重力场参数的系统。
应用学科:测绘学(一级学科);测绘学总类(二级学科)。
利用陀螺仪、加速度计等惯性敏感元件和电子计算机,实时测量运载体相对于地面运动的加速度,以确定运载体的位置和地球重力场参数的组合仪器。
这种系统是在惯性导航系统的基础上发展起来的,按所采用的导航坐标系统分为两大类:当地水平惯性系统和空间稳定系统。
一般多采用第一类的当地水平指北惯性系统。
整个系统安装在运载体(汽车或直升飞机)上,主要包括惯性测量装置(其核心为加速度计、陀螺仪和万向支架)、电子计算机、控制显示器、数据存储记录器和电源(见图[惯性测量系统工作原理方框图])1、基本原理:以当地水平指北系统为例,在陀螺仪GE、GN、G和电子计算机控制下,惯性平台始终保持地平坐标系,安装在平台上的3个互相正交的加速度计AE、AN、AZ,分别测出沿东西、南北和垂直方向的加速度分量ENZ,并输入计算机。
在消除加速度计误差、重力加速度和由于地球自转产生的科里奥利加速度影响后,得出运载体相对地平坐标系的位移加速度分量,再就t(从起始点到待测点的时间)进行两次积分,并考虑初始速度值 0N、 0E、0Z,就可解算出相对前一起始点的坐标变化量,同相应起始点的经度λ0、纬度0和高程h0累加,就得到待定点的坐标λ、和h:电子计算机除了用观测数据计算点位坐标外,还根据一次积分后的速度分量和已知地球参数(仪器所在点的地球子午圈和卯酉圈曲率半径M和N,地球自转角速度ω),连续计算控制惯性平台的力矩信号W、W 和W,以便实时跟踪所选定的地平坐标系。
垂直加速度计的输出信号,实际是运载体垂直加速度与当地的重力加速度之和。
当运载体停止时,它的垂直加速度为零,这时从中消除非重力加速度之后,就得到当地的重力加速度。
运载体在运动过程中,由计算机通过陀螺仪控制惯性平台,不断地按参考椭球面的曲率进动。
专版研究园地无标记的光学测量与惯性测量融合动作捕捉技术研究*文/陈曦 黄昌正 周言明 梁铭成 陈明基金项目: 基金项目:东莞市引进创新创业领军人才计划项目“面向虚拟现实的自然交互技术与融合产品研发和产业化”;广东省重点领域研发计划项目“大范围场景空间定位与自然人机交互关键技术研发及产品化应用”(2019B010147001)0 引言近些年来,随着全球范围内虚拟现实(virtual reality ,VR)商业化、普及化快速推进,VR 交互方式也由平面界面发展到虚拟空间追踪交互,极其强调沉浸感,而要完全沉浸进入虚拟世界,动作捕捉系统必不可少,可以说动作捕捉技术是VR 产业隐形钥。
VR 动作捕捉技术就是对真人进行实时地准确地测量并记录在真实三维空间中的运动轨迹和姿态,并将每一时刻运动状态还原到虚拟三维空间中的过程,使虚拟角色的动作和表情能像真人一般自然逼真。
VR 中应用的动作捕捉系统根据技术原理分为惯性动捕和光学动捕两大类。
光学动作捕捉系统是通过光学相机捕捉物体的连续运动图像,通过图像处理识别物体运动姿态;惯性动作捕捉系统 是通过惯性传感器捕捉运动物体的运动信息,通过航姿参考 系AHRS (attitude and heading reference system)解算获得运动物体姿态信息。
1 光学动作捕捉与惯性动作捕捉的结合光学动作捕捉与惯性动作捕捉两种动作方案都存在一些缺点:光学动作方案容易因为遮挡导致丢失关键信息,而惯性传感器会出现数据漂移而带来误差。
针对上述两种方案的问题,本研究提出采用惯性动作捕捉与无标记光学视觉动作捕捉技术相结合对目标人物进行动作捕捉(以下简称“光惯混合动捕”),在数据算法处理上把两种动作捕捉数据进行相互融合补充,结合视觉信息中空间位置的准确性以及惯性传感器的灵敏度高、动态性能好的特点,获取更为精确的动作信息。
2 整体思路如图1所示,光惯混合动捕主要由惯性动捕套件、深度摄像头、无线数据收发单元以及计算单元组成。