惯性测量仪器及原理简介(1)
- 格式:pptx
- 大小:607.56 KB
- 文档页数:19
光纤陀螺仪的原理与应用1. 引言光纤陀螺仪(Fiber Optic Gyroscope,简称FOG)是一种基于光学原理的惯性导航仪器,用于测量和检测物体的角速度。
光纤陀螺仪在航空航天、导航定位、地震监测等领域有着广泛的应用。
2. 原理光纤陀螺仪的工作原理基于光的干涉现象。
其主要由光源、光纤环、检测器等组成。
•光源:光源发出具有特定波长的光信号。
•光纤环:光纤环是由光纤绕成的一个环状结构,一端接光源,另一端接检测器。
•检测器:检测器用于接收和检测光信号。
当光源发出光信号后,光信号会在光纤环中传播,形成一个封闭光路径。
当光纤环受到旋转等外界作用力时,由于光的波长不变,光信号在光纤环中的传播速度会受到影响,从而引起光的相位差的变化。
通过检测器检测到这一变化,可以得到物体的角速度信息。
3. 优势与应用光纤陀螺仪相较于传统的机械陀螺仪具有以下优势:•高精度:光纤陀螺仪具有高精度的角速度测量能力,能够实现微小角度的测量。
•稳定性:光纤陀螺仪的结构简单,没有磨损部件,因此具有较长的寿命和较好的稳定性。
•抗干扰能力强:光纤陀螺仪能够抵抗振动、温度变化等外界干扰,确保测量的准确性。
•体积小、重量轻:光纤陀螺仪相较于传统陀螺仪,具有体积小、重量轻的特点,适用于各种空间受限的环境。
由于光纤陀螺仪的优势,它在许多领域都有广泛的应用:•航空航天:光纤陀螺仪可以用于航空航天器的导航、姿态控制等,提高飞行安全性和精确度。
•自动驾驶:光纤陀螺仪可以用于自动驾驶车辆的定位和导航系统,实现精确的定位和路径规划。
•地震监测:光纤陀螺仪可以用于地震监测,实时检测地壳运动,提供地震预警。
•水下探测:光纤陀螺仪可以用于水下机器人的导航和定位,提供精确的水下探测能力。
4. 发展与未来趋势光纤陀螺仪是惯性导航技术的重要组成部分,随着科技的不断进步,光纤陀螺仪将继续发展并在更多领域应用。
•提高精度:目前的光纤陀螺仪已经具备较高的精度,但未来仍有提升空间。
实验三刚体转动惯量的测定转动惯量是刚体转动中惯性大小的量度。
它与刚体的质量、形状大小和转轴的位置有关。
形状简单的刚体,可以通过数学计算求得其绕定轴的转动惯量;而形状复杂的刚体的转动惯量,则大都采用实验方法测定。
下面介绍一种用刚体转动实验仪测定刚体的转动惯量的方法。
实验目的:1. 理解并掌握根据转动定律测转动惯量的方法;2. 熟悉电子毫秒计的使用。
实验仪器:刚体转动惯量实验仪、通用电脑式毫秒计。
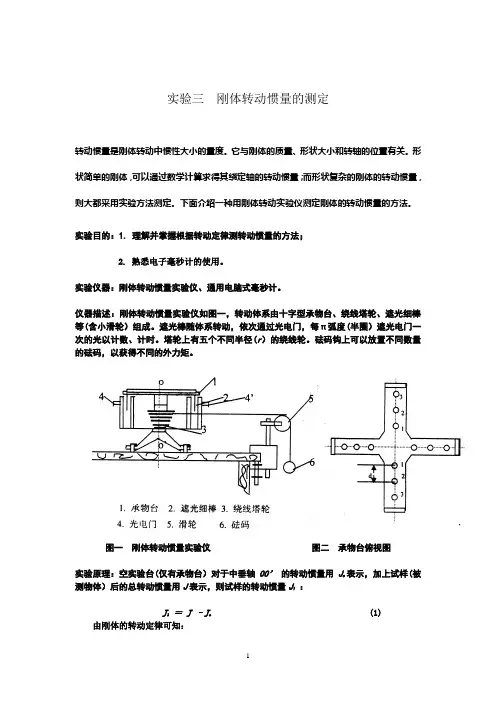
仪器描述:刚体转动惯量实验仪如图一,转动体系由十字型承物台、绕线塔轮、遮光细棒等(含小滑轮)组成。
遮光棒随体系转动,依次通过光电门,每π弧度(半圈)遮光电门一次的光以计数、计时。
塔轮上有五个不同半径(r)的绕线轮。
砝码钩上可以放置不同数量的砝码,以获得不同的外力矩。
图一刚体转动惯量实验仪图二承物台俯视图实验原理:空实验台(仅有承物台)对于中垂轴OO’的转动惯量用J o表示,加上试样(被测物体)后的总转动惯量用J表示,则试样的转动惯量J1:J1= J –J o (1) 由刚体的转动定律可知:T r – M r= J (2) 其中M r为摩擦力矩。
而 T = m(g -r α) (3) 其中 m —— 砝码质量g —— 重力加速度 α —— 角加速度 T —— 张力1. 测量承物台的转动惯量J o未加试件,未加外力(m =0 , T =0)令其转动后,在M r 的作用下,体系将作匀减速转动,α=α1,有-M r1 = J o α1(4) 加外力后,令α =α2m(g –r α2)r –M r1 = J o α2(5)(4)(5)式联立得J o =212212mr mgrααααα---(6)测出α1 , α2,由(6)式即可得J o 。
2. 测量承物台放上试样后的总转动惯量J ,原理与1.相似。
加试样后,有-M r2=J α3 (7) m(g –r α4)r –Mr 2= J α4 (8)∴ J =234434mr mgrααααα---(9)注意:α1 , α3值实为负,因此(6)、(9)式中的分母实为相加。
转动惯量的测定转动惯量是刚体转动中惯性大小的量度。
它取决于刚体的总质量,质量分布、形状大小和转轴位置。
对于形状简单,质量均匀分布的刚体,可以通过数学方法计算出它绕特定转轴的转动惯量,但对于形状比较复杂,或质量分布不均匀的刚体,用数学方法计算其转动惯量是非常困难的,因而大多采用实验方法来测定。
转动惯量的测定,在涉及刚体转动的机电制造、航空、航天、航海、军工等工程技术和科学研究中具有十分重要的意义。
测定转动惯量常采用扭摆法或恒力矩转动法,本实验采用恒力矩转动法测定转动惯量。
一、实验目的1、学习用恒力矩转动法测定刚体转动惯量的原理和方法。
2、观测刚体的转动惯量随其质量,质量分布及转轴不同而改变的情况,验证平行轴定理。
3、学会使用智能计时计数器测量时间。
二、实验原理1、恒力矩转动法测定转动惯量的原理根据刚体的定轴转动定律:βJ M = (1)只要测定刚体转动时所受的总合外力矩M 及该力矩作用下刚体转动的角加速度β,则可计算出该刚体的转动惯量J 。
设以某初始角速度转动的空实验台转动惯量为J 1,未加砝码时,在摩擦阻力矩M µ的作用下,实验台将以角加速度β1作匀减速运动,即:11βµJ M =− (2) 将质量为m 的砝码用细线绕在半径为R 的实验台塔轮上,并让砝码下落,系统在恒外力作用下将作匀加速运动。
若砝码的加速度为a ,则细线所受张力为T= m (g - a)。
若此时实验台的角加速度为β2,则有a= R β2。
细线施加给实验台的力矩为T R= m (g -R β2) R ,此时有:212)(ββµJ M R R g m =−− (3) 将(2)、(3)两式联立消去M µ后,可得:1221)(βββ−−=R g mR J (4) 同理,若在实验台上加上被测物体后系统的转动惯量为J 2,加砝码前后的角加速度分别为β3与β4,则有:3442)(βββ−−=R g mR J (5) 由转动惯量的迭加原理可知,被测试件的转动惯量J 3为:123J J J −= (6) 测得R 、m 及β1、β2、β3、β4,由(4),(5),(6)式即可计算被测试件的转动惯量。
进动仪原理进动仪(Gyroscope)是一种能够测量和维持方向的仪器,它在航空、航海、导航和惯性导航系统中起着至关重要的作用。
进动仪的原理是基于刚体运动的角动量守恒定律,通过旋转惯性来实现方向的稳定和测量。
本文将介绍进动仪的原理,以及其在实际应用中的重要性。
进动仪的原理基于刚体的角动量守恒定律。
当一个刚体受到外力作用时,它会产生角加速度,从而改变自身的角动量。
而在没有外力作用的情况下,刚体的角动量是守恒的。
进动仪利用这一原理,通过旋转惯性来实现方向的稳定和测量。
进动仪通常由陀螺仪和加速度计两部分组成。
陀螺仪是测量角速度的装置,它利用旋转惯性来实现方向的稳定和测量。
当进动仪所在的平台发生旋转时,陀螺仪会产生相应的输出信号,从而实现对旋转角速度的测量。
而加速度计则是用来测量加速度的装置,它可以通过重力加速度来确定地球的方向,从而实现对方向的稳定和测量。
进动仪在航空、航海、导航和惯性导航系统中起着至关重要的作用。
在飞行器中,进动仪可以实现对飞行器的姿态稳定和导航控制,从而确保飞行器的飞行安全和准确性。
在航海中,进动仪可以实现对船舶的航向稳定和导航控制,从而确保船舶的航行安全和准确性。
在导航系统中,进动仪可以实现对导航设备的方向稳定和测量,从而确保导航系统的准确性和可靠性。
在惯性导航系统中,进动仪可以实现对惯性导航系统的姿态稳定和导航控制,从而确保惯性导航系统的导航精度和可靠性。
总之,进动仪是一种能够测量和维持方向的重要仪器,它的原理是基于刚体运动的角动量守恒定律,通过旋转惯性来实现方向的稳定和测量。
进动仪在航空、航海、导航和惯性导航系统中起着至关重要的作用,它可以实现对飞行器、船舶、导航设备和惯性导航系统的方向稳定和测量,从而确保它们的安全性和准确性。
进动仪的原理和应用对于提高航空、航海、导航和惯性导航系统的性能和可靠性具有重要意义。
第1篇 一、实验目的 1. 理解惯性系统阶跃响应的概念及特点。 2. 掌握惯性系统阶跃响应的测试方法及数据处理技巧。 3. 分析惯性系统阶跃响应的动态特性,如上升时间、峰值时间、超调量等。 4. 研究惯性系统参数对阶跃响应的影响。 二、实验原理 惯性系统阶跃响应是指系统在阶跃信号作用下,输出信号的动态过程。阶跃信号是一种理想的信号,其特点是信号在短时间内从零突变到某一固定值。惯性系统阶跃响应的测试方法主要包括:示波器法、计算机测试法等。
三、实验仪器与设备 1. 惯性系统:实验所用惯性系统由质量块、弹簧、阻尼器等组成。 2. 阶跃信号发生器:用于产生阶跃信号。 3. 示波器:用于观察和记录惯性系统阶跃响应曲线。 4. 数据采集卡:用于将示波器信号传输至计算机进行数据处理。 5. 计算机及测试软件:用于数据处理和分析。 四、实验步骤 1. 搭建惯性系统实验平台,确保系统稳定。 2. 使用阶跃信号发生器产生阶跃信号,输入惯性系统。 3. 通过示波器观察惯性系统阶跃响应曲线,并记录相关数据。 4. 将示波器信号传输至计算机,利用测试软件进行数据处理和分析。 5. 分析惯性系统阶跃响应的动态特性,如上升时间、峰值时间、超调量等。 6. 研究惯性系统参数对阶跃响应的影响。 五、实验数据与分析 1. 实验数据 (1)惯性系统参数:质量m=0.1kg,弹簧刚度k=10N/m,阻尼系数c=0.1N·s/m。 (2)阶跃信号幅值:5mV。 (3)阶跃响应曲线如图1所示。 图1 惯性系统阶跃响应曲线 2. 实验分析 (1)上升时间:阶跃响应曲线从起始点上升至峰值所需的时间。 (2)峰值时间:阶跃响应曲线达到峰值所需的时间。 (3)超调量:阶跃响应曲线峰值与稳态值之差与稳态值之比。 根据实验数据,可得到以下结果: (1)上升时间t_r=0.2s; (2)峰值时间t_p=0.4s; (3)超调量σ_p=40%。 六、实验结论 1. 惯性系统阶跃响应曲线呈典型S型,具有上升时间、峰值时间和超调量等动态特性。
用扭摆法测定物体转动惯量(一)教学基本要求学会用扭摆法测量物体转动惯量的原理和方法。
了解转动惯量的平行轴定理,理解“对称法”验证平行轴定理的实验思想,学会验证平行轴定理的实验方法。
掌握定标测量思想方法。
学会转动惯量测试仪的使用方法。
学会测量时间的累积放大法。
掌握不确定度的估算方法。
(二)讲课提纲1.实验简介转动惯量是表征转动物体惯性大小的物理量,是研究、设计、控制转动物体运动规律的重要工程技术参数。
如钟表摆轮、精密电表动圈的体形设计、枪炮的弹丸、电机的转子、机器零件、导弹和卫星的发射等,都不能忽视转动惯量的大小。
因此测定物体的转动惯量具有重要的实际意义。
刚体的转动惯量与刚体的质量分布、形状和转轴的位置都有关系。
对于形状较简单的刚体,可以通过计算求出它绕定轴的转动惯量,但形状较复杂的刚体计算起来非常困难,通常采用实验方法来测定。
2.实验设计思想和实现方法(1)基本原理转动惯量的测量,基本实验方法是转换测量,使物体以一定的形式运动,通过表征这种运动特征的物理量与转动惯量的关系,进行转换测量。
实验中采用扭摆法测量不同形状物体的转动惯量,就是使物体摆动,测量摆动周期,通过物体摆动周期T 与转动惯量I 的关系k I T π2=来测量转动惯量。
(2)间接比较法测量,确定扭转常数K已知标准物体的转动惯量I 1,被测物体的转动惯量I 0;被测物体的摆动周期T 0,标准物体被测物体的摆动周期T 1。
通过间接比较法可测得20212010T T T I I -=也可以确定出扭转常数K2021124T T I k -=π定出仪器的扭转常数k 值,测出物体的摆动周期T ,就可计算出转动惯量I 。
(3)“对称法”验证平行轴定理平行轴定理:若质量为m 的物体(小金属滑块)绕通过质心轴的转动惯量为I 0时,当转轴平行移动距离x 时,则此物体的转动惯量变为I 0+mx 2。
为了避免相对转轴出现非对称情况,由于重力矩的作用使摆轴不垂直而增大测量误差。
螺旋测微器的测量原理及适用螺旋测微器是一种能够测量物体长度的机械测量仪器,广泛应用于工业生产、科研实验等各个领域。
本文将介绍螺旋测微器的测量原理及适用性。
一、螺旋测微器的测量原理螺旋测微器利用螺旋线惯性原理,通过旋转一根螺旋线对物体进行测量。
在螺旋测微器上面标有一些刻度线和指针。
通过旋转螺旋线,物体会向上或向下移动一定距离,同时指针也会移动相应的距离。
设螺旋线的螺距为p,每转动一周时移动的距离为L,则测量的精度为p/L。
螺旋测微器的测量原理是通过测量物体长度来确定物体大小。
通过旋转螺旋线,将其移动位置,利用螺距和移动距离,计算出物体的长度。
二、螺旋测微器的适用范围螺旋测微器适用于精密测量,测量范围一般在0-25mm之间,精度高,可达到0.001mm,最高可达到0.0001mm以上,因此在珠宝加工、精密机械制造、模具制作等领域有着广泛的应用。
同时,在日常生活中,螺旋测微器也有着不同的应用,例如测量电路板的厚度、汽车发动机缸径等,能够满足对长度测量的高精度要求。
三、螺旋测微器的注意事项1.螺旋测微器的精度很高,但是使用时需要注意避免碰撞或者摔落,以免影响精度。
2.使用时要避免磁性物体的干扰,以免对螺旋测微器的准确度产生负面影响。
3.使用时需要注意加油润滑,以保证螺旋测微器的正常运作。
4.操作时需要精细,慢慢旋转,不要过度旋转,以免导致测量不准确。
5.使用后需要清洁,保持表面干燥。
四、结论螺旋测微器是一种应用十分广泛的机械测量仪器,对于精密测量有着高精度的要求,能够广泛应用于工业生产、科研实验等领域。
使用螺旋测微器需要注意事项,以保证其测量结果的准确性。
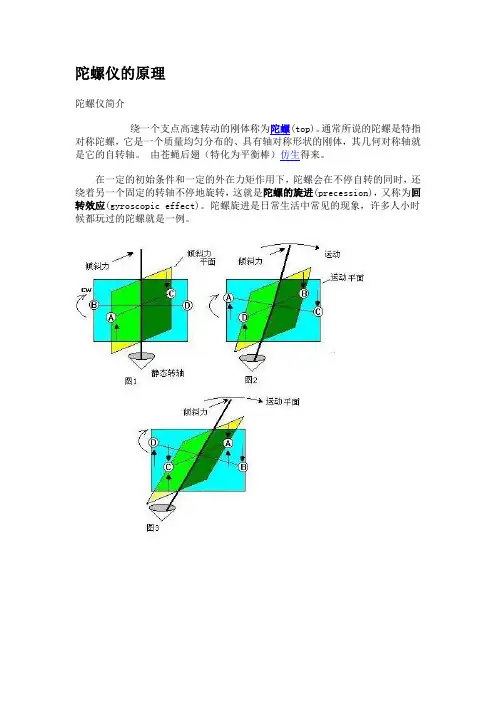
陀螺仪的原理陀螺仪简介绕一个支点高速转动的刚体称为陀螺(top)。
通常所说的陀螺是特指对称陀螺,它是一个质量均匀分布的、具有轴对称形状的刚体,其几何对称轴就是它的自转轴。
由苍蝇后翅(特化为平衡棒)仿生得来。
在一定的初始条件和一定的外在力矩作用下,陀螺会在不停自转的同时,还绕着另一个固定的转轴不停地旋转,这就是陀螺的旋进(precession),又称为回转效应(gyroscopic effect)。
陀螺旋进是日常生活中常见的现象,许多人小时候都玩过的陀螺就是一例。
陀螺仪的原理我们不用一个完整的轮框,我们用四个质点ABCD来表示边上的区域,这个边对于用图来解释陀螺仪的工作原理是很重要的。
轴的底部被托住静止但是能够各个方向旋转。
当一个倾斜力作用在顶部的轴上的时候,质点A向上运动,质点C则向下运动,如其中的子图1。
因为陀螺仪是顺时针旋转,在旋转90度角之后,质点A将会到达质点B的位置。
CD两个质点的情况也是一样的。
子图2中质点A 当处于如图的90度位置的时候会继续向上运动,质点C也继续向下。
AC质点的组合将导致轴在子图2所示的运动平面内运动。
一个陀螺仪的轴在一个合适的角度上旋转,在这种情况下,如果陀螺仪逆时针旋转,轴将会在运动平面上向左运动。
如果在顺时针的情况中,倾斜力是一个推力而不是拉力的话,运动将会向左发生。
在子图3中,当陀螺仪旋转了另一个90度的时候,质点C在质点A受力之前的位置。
C质点的向下运动现在受到了倾斜力的阻碍并且轴不能在倾斜力平面上运动。
倾斜力推轴的力量越大,当边缘旋转大约180度时,另一侧的边缘推动轴向回运动。
万向节陀螺仪实际上,轴在这个情况下将会在倾斜力的平面上旋转。
轴之所以会旋转是因为质点AC在向上和向下运动的一些能量用尽导致轴在运动平面内运动。
当质点AC最后旋转到大致上相反的位置上时,倾斜力比向上和向下的阻碍运动的力要大。
陀螺仪运动的特性是它拐弯的时候能够保持单轨设备的直上直下。

惯性称实验报告篇一:惯性秤实验报告(完全版)实验报告总体不错!班级_____信工C班________组别_____F________ 姓名______郭洁_______ 学号_87__ 日期_______ 【实验题目】惯性秤【实验目的】1. 掌握用惯性秤测量物体质量的原理和方法;2. 学习惯性秤的定标和使用方法;3. 研究重力对惯性秤的影响。
【实验仪器】惯性秤及附件一套,光电控制数字计时器,米尺,天平(公用),水平仪【实验原理】【实验内容】1. 安装和调整测量系统,包括惯性秤和计时系统。
使用前要将平台C调成水平,并检查计时器工作是否正常。
2. 检查标准质量块的质量是否相等,可逐一将标准质量块置于秤台上测周期,如果各质量块的周期测定值的平均值相差不超过1%,在这里就认为标准质量块的质量是相等的,并取标准质量块的质量的平均值为此实验中的质量单位。
用所给质量大致相等的砝码作出惯性秤的定标曲线。
3. 测定以圆柱体为负载时秤的周期,并由定标曲线查出该圆柱体的惯性质量。
4. 测定惯性秤的劲度系数和秤台的有效质量。
5. 将被测圆柱体悬吊于支架上,细心调整其自由悬垂位置,使之恰好处在秤台中心。
测定悬点到圆柱体中心的距离 (用米尺测量)和此时秤台的周期,研究重力对系统周期的影响,验证(2-9)式是否成立。
6. 将秤臂铅直放置,测定秤臂长 (用米尺测量)和秤的周期(负载仍为圆柱体),验证(2-10)式是否成立(选做)。
7. 用天平称衡砝码和被测圆柱体的引力质量,分析它与惯性质量的关系。
【预习报告】小圆柱质量大圆柱质量103 189.5s k b m小圆柱质量大圆柱拉线 1.9251 20. 0.0962 0.04997143 0.1 0.2 0.6【实验数据分析】1.小圆柱本身质量是103g,用我们这种方法测出来的是102g,相差1g。
2.大圆柱本身质量是189.5g,用我们这种方法测出来的是197g,相差7g。
实验五刚体转动惯量的测量【实验简介】转动惯量是描述刚体转动惯性大小的物理量,是研究刚体转动定律的一个重要物理量,它不仅取决于刚体的总质量,而且与刚体的形状、质量分布以及转轴位置有关。
对于质量分布均匀、形状简单规则的刚体,可以通过数学方法计算绕特定轴的转动惯量;对于质量分布不均匀、形状复杂的刚体,计算转动惯量是相当困难的,通常要用实验的方法来测定其大小。
因此,测定转动体系的转动惯量成为生产实践中经常会遇到的一个课题。
测转动惯量的实验方法较多,如拉伸法、扭摆法、三线摆法等,本实验是利用“塔轮式刚体转动惯量实验仪”来测定刚体的转动惯量。
【实验目的】1.用实验方法验证刚体的转动定律。
2.学会用作图法处理数据。
3.学习测量转动惯量的一种方法。
【实验仪器】刚体转动惯量实验仪,电子秒表、卷尺(米尺)、小挂钩、小槽码(每个5.00g,5~6个)。
图5-1刚体转动实验仪1-气泡水准仪;2-横杆;3-可移动的重锤;4-底座;5-轴固定螺丝;6-塔轮;7-转轴;8-底脚螺丝;9-滑轮;10-滑轮固定螺丝;11-滑轮架;12-指示标志;13-滑轮架固定螺丝;14-砝码实验五 刚体转动惯量的测量2【实验原理】根据转动定律,刚体绕固定轴转动时,刚体的角加速度β与所受的合力矩M 成正比,与转动惯量J 成反比,即:M J β= (5-1)如图所示刚体系(塔轮、横柱和两个质量为0m 的重物)所受外力矩是绳的张力矩及轴上的摩擦力矩。
根据转动定律有:r Tr M J -β= (5-2)式中T 为绳的张力;r 为塔轮的半径;r M 为轴上的摩擦力矩。
以砝码m 为研究对象,根据牛顿第二定律有:-=mg T 'ma (5-3)当滑轮和绳的质量均可忽略,滑轮轴上的摩擦力矩不计时,有:=T T ' (5-4) 当绳与塔轮之间没有相对滑动时,砝码的加速度a 与塔轮的角加速度β的关系为:βa =r (5-5)整理可得 ()-=+r Jam g a r M r(5-6) 若砝码由静止开始下落h 高度所用的时间为t ,则有:212=h at 即 22=ha t(5-7) 将上式代入(2-6)式,可得()22-=+r Jhm g a r M rt(5-8) 在实验过程中,如果满足ga ,上式中a 可忽略,则有:实验五 刚体转动惯量的测量3222=+r M Jhm gr gr t(5-9) 若rM mgr ,略去r M ,则有:222=Jhm gr t(5-10) 下面分两种情况进行讨论。
班级__信工C班___ 组别______D______姓名____李铃______ 学号_1111000048_日期___2013.3.13__ 指导教师___张波____【实验题目】_________霍尔效应测磁场【实验目的】1.研究霍尔元件的特性,并测定其灵敏度;2.测量电磁铁气隙中的磁感应强度;3.了解霍尔效应的产生原理及其副效应的产生原理和消除方法。
【实验仪器】马蹄形电磁铁,霍尔片,电流表,电池盒,数字万用表,换向开关,导线若干,霍尔效应实验仪。
【实验原理】霍尔最初的实验是这样的:在一块长方形的薄金属片(霍尔片)两边的对称点1和2之间接上一个检流计(如图7.1所示)。
为方便,取如图所示的直角坐标系。
沿x轴正向通以电流I。
若不加磁场,则检流计不显示任何偏转,这说明1和2两点电位相等。
若在z轴方向加上磁场B,则检流计立即偏转。
这说明1和2两点之间存在电位差。
霍尔发现这个电位差与电流I及磁感应强度 B均成正比,与板的厚度d成反比,即(7-1)这叫霍尔公式。
通常称UH为霍尔电压,RH为霍尔系数,KH为霍尔片的灵敏度,且KH=RH/d。
在当时,式(7-1)纯粹是一个经验公式,在洛伦兹的电子论提出来以后从理论上得到证明。
霍尔电压的产生可以用洛伦兹力来解释。
磁场力即洛仑兹力为=×B(7-2)按矢积的定义,上式中F的大小为:(7-3),式中,为和B之间的夹角,F的方向垂直和B 构成的平面,并遵守右手螺旋法则,如图7.2所示。
式(7-2)表明,洛仑兹力F的方向与电荷的正负有关。
图2所示的是正电荷受力的方向,若是负电荷,则受力方向与此相反。
若电流沿X轴正方向通过霍尔片,如图7.3所示.则霍尔片中的载流子在磁场力作用下发生定向偏转,霍尔片两长边分别出现了正负电荷的聚积,因而两个端面有了电位差,并由此产生一个静电场,设其电场强度为EY则电子又受到一个静电力作用,其大小为(7-4)它的方向正好与洛仑兹力的方向相反。
大学物理实验——转动惯量的测量一、实验简介转动惯量是描述物体转动惯性大小的物理量,在很多物理领域都有应用,如力学、天文学、机械工程等。
旋转刚体的转动惯量难以用理论计算,因此需要通过实验手段来测量。
本实验采用杠杆原理和摆锤法测量转动惯量。
具体实验分为分别测量长方体和球体的转动惯量两部分。
二、实验原理1.杠杆原理杠杆原理指的是物体旋转平衡的条件,它的本质是由力矩平衡方程推导出来的。
对于一个杠杆,在杠杆的支点附近施加一个力F,并在杠杆的另一端连接一个质量为m 的物体,在杠杆上会产生一个力矩M=F×l,其中l为力F的作用点到支点的距离。
力矩M使杠杆得以旋转,当其达到平衡时,力矩平衡方程成立,即ΣM=0。
若在杠杆上标出以支点为原点的坐标轴,则ΣF×d=0其中F为力的大小,d为力的作用点到支点的距离。
2.摆锤法摆锤法是测量绕轴转动惯量的一种简单实验方法。
实验中将一个质量为m、长度为l 的摆杆用轴向支承,摆杆自然竖直下垂作自由振动,同时扣上一重物使其在实验桌面上绕轴转动,用其振动周期(或半周期)测量转动惯量I。
当转动惯量I定量时,摆杆的振动周期T与重物的离心距r及重力加速度g有关系式T=2π√(I/mgl)三、实验仪器及设备1.长方体、球体3.摆杆4.支架5.计时器6.测量尺四、实验过程1.测量长方体的转动惯量(1)测量长方体的各项尺寸分别测量长方体的长、宽、高等参数,记录下各项指标。
(2)测量杠杆长度将支架放在水平面上,用测量尺测量杠杆长度l1及重心距离l2。
(3)测量转动惯量将长方体水平放置在摆杆上,并使其绕轴转动,记录下其振动周期T。
取4个测量值,求出平均值T_0。
再将重物移至长方体的中心,重新测量振动周期T,取4个测量值,求出平均值T_1。
根据摆锤法的公式I=mgl(T_1/T_0)^2/4π^2-ml^2/3(1)测量球体的半径及重量即可求出球体的转动惯量I。
五、实验注意事项1.实验过程中要注意测量杠杆长度,以保证实验结果的准确性。
实验02 扭摆法测定物体转动惯量实验02扭摆法测定物体转动惯量实验2用扭摆法测量物体的转动惯量转动惯量是刚体转动时惯性大小的量度,是表明刚体特性的一个物理量。
刚体转动惯量除了与物体质量有关外,还与转轴的位置和质量分布(即形状、大小和密度分布)有关。
如果刚体形状简单,且质量分布均匀,可以直接计算出其绕特定转轴转动的转动惯量。
对于形状复杂,质量分布不均匀的刚体,其转动惯量计算极为复杂,必须通常采用实验方法来测定,例如机械部件,电动机转子和枪炮的弹丸等。
惯性矩的测量通常是使刚体以某种形式运动。
转换测量通过表征运动的物理量与惯性矩之间的关系进行。
在本实验中,将物体制成扭摆,通过测量摆动周期和其他参数来计算物体的惯性矩。
【实验目的】1.2.3.4.5.加深对刚体转动知识、胡克定律、谐振方程的理解。
了解光电门的工作原理。
掌握游标卡尺的使用方法。
学习使用扭摆法测量不同形状物体的惯性矩。
验证转动惯量平行轴定理(实验设计项目、选做)。
[文书]th-2型智能转动惯量实验仪、游标卡尺、电子天平[实验原理]根据胡克定律,弹簧受扭转而产生的恢复力矩m与所转过的角度?成正比,即MK(2-1)式中,k为弹簧的扭转常数,根据转动定律M我(2-2)式中I是物体绕旋转轴的惯性矩,?是角加速度吗,?是角速度。
角加速度?角速度和角度是多少?这种关系是:d?d22(2-3)Dtdt由方程式(2-1)和方程式(2-2)得出ik?(2-4)i令?02?k,忽略轴承的摩擦阻力矩,由式(2-3)、式(2-4)得d2?k2??2.0 (2-5)idt即d2?2.(2-6)0dt2方程(2-5)表明,扭摆运动具有角简谐振动的特征,角加速度与角位移成正比,方向相反。
这个方程的解是:acos(?0t)(2-7)式中,a为谐振动的角振幅,?为初相位角,?0为谐振动的圆频率,根据圆频率?0与周期t的关系(t?2?)和式(2-5)的关系有0吨?2.0 2? I(2-8)k由等式(2-8)表示kt2(2-9)i1?24?由式(2-9)可知,只要测得物体扭摆的摆动周期t和弹簧的扭转常数k即可计算出夹具与待测物体一起旋转的惯性矩I。
一、实验目的1. 验证刚体转动定律,通过实验方法测量刚体的转动惯量。
2. 观察刚体的转动惯量与质量分布的关系。
3. 学习使用实验仪器和方法,进行物理量的测量和数据处理。
二、实验原理刚体转动惯量(J)是描述刚体绕某一固定轴转动时,其惯性大小的物理量。
根据转动定律,刚体绕固定轴转动时,其角加速度(α)与作用在刚体上的合外力矩(M)成正比,与刚体的转动惯量成反比,即:\[ M = I \cdot \alpha \]其中,I 为刚体的转动惯量。
对于规则形状的均质刚体,其转动惯量可以通过几何公式直接计算得出。
但对于不规则形状或非均质刚体,其转动惯量一般需要通过实验方法测定。
三、实验仪器1. 刚体转动惯量测量装置(包括:旋转轴、测量台、测速仪、计时器、砝码等)2. 刚体(如圆环、均质杆等)3. 质量测量仪4. 游标卡尺四、实验步骤1. 将刚体放置在测量台上,调整旋转轴使其垂直于刚体的旋转平面。
2. 使用质量测量仪测量刚体的质量(m)。
3. 使用游标卡尺测量刚体的几何尺寸(如半径、长度等)。
4. 将砝码挂在旋转轴上,调整砝码的质量和位置,使其对刚体产生合外力矩。
5. 使用测速仪测量刚体的角速度(ω)。
6. 使用计时器测量砝码下降的时间(t)。
7. 根据实验数据,计算刚体的转动惯量。
五、数据处理1. 计算刚体的角加速度(α):\[ \alpha = \frac{2\pi \cdot \omega}{t} \]2. 计算刚体的转动惯量(I):\[ I = \frac{m \cdot r^2}{2} \]其中,r 为刚体的几何尺寸。
六、实验结果与分析1. 通过实验测量,得到刚体的转动惯量(I)为:_______ kg·m²。
2. 分析实验结果,比较不同刚体的转动惯量,观察质量分布对转动惯量的影响。
3. 分析实验误差,探讨可能的原因。
七、实验总结1. 通过本次实验,成功验证了刚体转动定律,并测量了刚体的转动惯量。