出发的相轨迹曲线互不相交. 如果在相平面上某些点的
d x/ dx 0/ 0, 即曲线在这一点上的斜率不定, 可有无穷多
条相轨迹通过这一点, 称这一点为系统的平衡点, 或叫奇
点.
在相平面的上方(如下图) ,
由于
x
0所以
x总是朝大的
x
A(x0 ,
x0 )
方向变化, 故相轨迹上的点总是按图 中箭头所指从左向右移动. 在相平面
u0
0
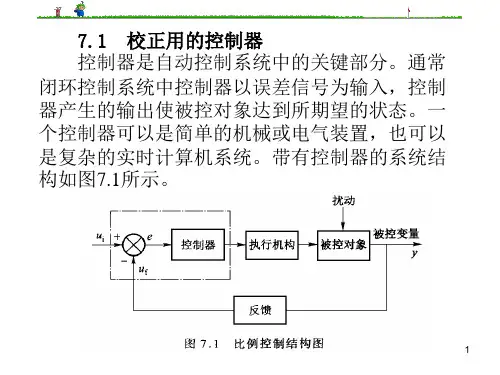
u(t) u(t) G(s) c(t)
u0
上图中, 大方框表示一具有理想继电特性的非线性环节, G(s) 表示非线性系统中线性部分的传递函数.
非线性的特性是各种各样的, 教材图及 表给出了一些工程上常见的典型非线性特性.
7-2非线性控制系统的特征
非线性控制系统有如下两个基本特征: (1)非线性控制系统的基本数学模型是非线性微分方程 (2)非线性控制系统的性能不仅与系统本身的结构和参
0
x
的下方,
由于
x
0
所以
x
总是朝小的
方向变化, 故相轨迹上的点总是按图中箭
箭头所指从右向左移动. 在 x 轴上, 由于
x 0, 即 x不变化, 达到最大值或最小值, 故相轨迹曲线
与 x 轴的交点处的切线总垂直于x 轴.
2. 相轨迹作图法
先以线性系统为例, 说明相轨迹曲线的画法.
(1)解析法
数有关, 还与系统的初始状态及输入信号的形式和大小 有关.
由于非线性控制系统的基本数学模型是非线性微分 方程, 而从数学上讲, 非线性微分方程没有一个统一的 解法, 再由于第二个特征, 对非线性控制系统也没有一 个统一的分析和设计的方法, 只能具体问题具体对待.