多子阵SAS非Stop—and—Hop近似RD成像算法
- 格式:pdf
- 大小:221.23 KB
- 文档页数:4

阵列信号处理中的DOA (窄带)/接收过程中的信号增强。
参数估计:从而对目标进行定位/给空域滤波提供空域参数。
(DOA)θ的函数,P(θ)./经典波束形成器 注,延迟相加法和CBF 法本质相同,仅仅是CBF 法的最优权向量是归一化了的。
CBF / Bartlett 波束形成器 CBF :Conventional Beam Former ) 最小方差法/Capon 波束形成器/ MVDR 波束形成器MVDR :minimum variance distortionless response )Root-MUSIC 算法多重信号分类法解相干的MUSIC 算法 (MUSIC )基于波束空间的MUSIC 算法 TAM 旋转不变子空间法 LS-ESPRIT TLS-ESPRIT 确定性最大似然法(DML :deterministic ML )随机性最大似然法(SML :stochastic ML )最大似然估计法是最优的方法,即便是在信噪比很低的环境下仍然具有良好的性能,但是通常计算量很大。
同子空间方法不同的是,最大似然法在原信号为相关信号的情况下也能保持良好的性能。
只要确定了阵列各阵元之间的延迟τ,就可以很容易地得出一个传统的波达方向估计方法是基于波束形成和零波导引概念的,并没有利用接收信号向量的模型(或信号和噪声的统计特性)。
知道阵列流形 A 以后,可以对阵列进行电子导引,利用电子导引可以把波束调整到任意方向上,从而寻找输出功率的峰值。
①常规波束形成(CBF)法CBF法,也称延迟—相加法/经典波束形成器法/傅里叶法/Bartlett波束形成法,是最简单的DOA 估计方法之一。
这种算法是使波束形成器的输出功率相对于某个信号为最大。
(参考自:阵列信号处理中DOA估计及DBF技术研究_赵娜)注意:上式中,导向矩阵A表示第K个天线阵元对N个不同的信号s(i)示第i个信号s(i)在M个不同的天线上的附加权值。


宽带宽测绘带 SAS 非线性线频调变标算法田振;唐劲松;钟何平;张森【摘要】In order to solve the imaging problem of synthetic aperture sonar ( SAS) with wide swath under a wide-band transmission signal, an extended nonlinear chirp-scaling ( NCS) imaging algorithm is proposed.In the algo-rithm, by implementing Taylor series expansion for the two-dimensional spectrum with point target response and re-maining it to four-order terms, the broadband adaptation is effectivelyincreased.However, by considering the prop-erties of the first-order linear change and the second-order nonlinear change of the equivalent slope of frequent mod-ulation following time delay difference, the adaptation to wide swath of the algorithm is effectively improved.The second-order nonlinear change properties of the equivalent slope of frequent modulation following time delay differ-ence in the process of deducing the relational parameters are introduced in operating the third and fourth order phase filtering and nonlinear chirp-scaling ( NCS) .The phase error due to the higher-order terms with respect to the range frequency is accurately correct and the image quality is improved apparently.The results of simulation showed the effectiveness of the proposed algorithm.%为解决大带宽发射信号下的宽测绘带合成孔径声呐成像问题,提出了一种扩展的非线性线频调变标成像算法。

阵列信号doa算法阵列信号DOA算法是指通过阵列信号处理技术来估计信号的到达角度。
DOA,即Direction of Arrival,是指信号传播路径和接收器方向之间的夹角。
DOA的精确估计对于无线通信、雷达系统和声音信号处理等领域具有重要意义。
本文将介绍阵列信号DOA算法的基本原理和常用的算法方法。
阵列信号DOA算法的基本原理是利用阵列接收器接收信号时,由于信号到达时间存在差异,导致信号在不同元素间的相位差。
通过测量这些相位差,可以得到信号的到达角度信息。
阵列接收器通常由多个接收元素组成,接收到的信号经过阵列处理后,可以获得比单个接收器更多的信息,从而提高DOA估计的精度。
常用的阵列信号DOA算法包括波束形成算法、空间谱估计算法和子空间分析算法等。
波束形成算法是一种基于反馈的方法,通过调整接收信号的权值,使得阵列输出的响应达到最大。
波束形成算法简单直观,但对噪声和干扰较敏感。
空间谱估计算法是一种传统算法,常用的方法有基于协方差矩阵的最小二乘法(MUSIC)、最大似然法(ML)和导向向量匹配(DVM)等。
这些方法通过计算信号在不同方向上的谱密度来估计DOA。
空间谱估计算法具有较好的性能,但计算复杂度较高。
子空间分析算法是一种基于信号子空间分解的方法,常用的方法有主成分分析(PCA)、奇异值分解(SVD)和阵列信号处理(ASD)等。
这些方法利用信号子空间的特性来估计DOA,具有较好的鲁棒性和鲁棒性。
然而,子空间分析算法对于成分数目和噪声水平的估计要求较高。
多传感器系统和自适应信号处理也是阵列信号DOA算法的重要研究方向。
通过增加接收元素数量和使用自适应算法,可以进一步提高DOA估计的精度和鲁棒性。
高维信号处理、压缩感知和深度学习等新技术也为阵列信号DOA算法的研究提供了新的思路和方法。
总之,阵列信号DOA算法是一种通过阵列信号处理技术来估计信号的到达角度的方法。
常用的算法包括波束形成算法、空间谱估计算法和子空间分析算法等。

rd成像算法通俗讲解同学们!今天咱们来聊聊超酷的RD 成像算法。
这玩意儿听起来挺高深莫测的吧?别担心,听我用大白话给你讲讲。
咱们得知道RD 成像算法是干啥的。
它就是一种能让我们看到很厉害的图像的方法。
就好像是一个魔法,能把一些我们看不到或者看不清楚的东西变得清晰可见。
那它到底是怎么做到的呢?咱们可以把它想象成一个大侦探在破案。
这个大侦探呢,就是我们的RD 成像算法。
一开始,它会收集各种线索。
这些线索就像是从不同地方传来的信号。
比如说,在医学上,可能是从人体内部反射回来的超声波信号;在雷达上,可能是从目标物体反射回来的电磁波信号。
收集到这些信号后,RD 成像算法就开始分析它们。
它会像一个聪明的数学家一样,用各种公式和计算方法来处理这些信号。
比如说,它会根据信号的时间差来判断物体的距离。
就好像我们听到声音从不同地方传来的时间不一样,就能知道那个地方离我们有多远。
RD 成像算法也是这样,通过分析信号的时间差,就能确定物体在空间中的位置。
然后呢,它还会根据信号的强度来判断物体的性质。
比如在医学超声成像中,如果一个地方的信号很强,可能就说明那里有一个比较硬的组织;如果信号很弱,可能就是一个比较软的组织。
在这个过程中,RD 成像算法还会用到一些很厉害的技术。
比如说,快速傅里叶变换。
这个名字听起来很吓人吧?其实它就是一种能让我们更快地处理信号的方法。
就像我们做数学题的时候,如果有一个好的方法,就能做得又快又准。
经过一系列的分析和处理,RD 成像算法就能画出一幅图像啦。
这幅图像就像是大侦探破案后画出的犯罪现场图一样,能让我们清楚地看到物体的形状、大小和位置。
在医学上,RD 成像算法可以帮助医生看到人体内部的情况,比如肝脏、心脏、血管等等。
这样医生就能更好地诊断疾病,制定治疗方案。
在雷达上,RD 成像算法可以帮助我们探测飞机、船只、导弹等目标物体。
这样我们就能更好地保卫国家的安全。
同学们,RD 成像算法是不是很厉害呢?虽然它的原理有点复杂,但是只要我们多学习、多思考,就一定能理解它。

多子阵SAS逐线成像算法研究
汪海涛;唐劲松;苑秉成
【期刊名称】《哈尔滨工程大学学报》
【年(卷),期】2009(030)007
【摘要】常规的高效率合成孔径成像算法都是针对单阵设置的,并且普遍作了Stop-and-Hop假设,当SAS成像系统作用距离较远时,由Stop-and-Hop假设引起的系统误差不容忽略.传统的方法是利用逐点算法进行系统误差修正,计算量大,不适合实时处理.针对这一情况,该文采用收发分置的几何模型处理多子阵SAS回波数据,提出一种多子阵SAS逐线成像算法,修正系统误差的同时提高了运算效率.仿真试验和湖试结果验证了分析的正确性和算法的有效性.
【总页数】4页(P820-823)
【作者】汪海涛;唐劲松;苑秉成
【作者单位】海军工程大学兵器工程系,湖北,武汉,430033;海军工程大学电子工程学院,湖北,武汉,430033;海军工程大学兵器工程系,湖北,武汉,430033
【正文语种】中文
【中图分类】TN911.7
【相关文献】
1.星载Mosaic模式SAR成像算法研究 [J], 王威;刘中伟;宋小全;贾鑫
2.多子阵SAS非Stop-and-Hop近似RD成像算法 [J], 向昌文;汪海涛
3.一种多子阵合成孔径声纳成像算法研究 [J], 殷钊;彭成;陈晓辉;杨博
4.舰船目标混合式SAR/ISAR成像算法研究 [J], 曹晔; 师亚辉; 闫海鹏; 张剑琦
5.基于参考距离史的多子阵SAS成像算法 [J], 吴浩然;张非也;唐劲松;佟怡铄因版权原因,仅展示原文概要,查看原文内容请购买。

距离多普勒算法1.简介距离多普勒算法(RDA)是在1976年至1978年为处理SEASAT SAR数据而提出的,至今仍在广泛使用,它通过距离和方位上的频域操作,达到了高效的模块化处理要求,同时又具有了一维操作的简便性。
该算法根据距离和方位上的大尺度时间差异,在两个一维操作之间使用距离徙动校正(RCMC),对距离和方位进行了近似的分离处理。
由于RCMC是在距离时域-方位频域中实现的,所以也可以进行高效的模块化处理。
因为方位频率等同于多普勒频率,所以该处理域又称为“距离多普勒”域。
RCMC的“距离多普勒”域实现是RDA与其他算法的主要区别点,因而称其为距离多普勒算法。
距离相同而方位不同的点目标能量变换到方位频域后,其位置重合,因此频域中的单一目标轨迹校正等效于同一最近斜距处的一组目标轨迹的校正。
这是算法的关键,使RCMC能在距离多普勒域高效地实现。
2.算法概述图1示意了RDA的处理流程。
1.当数据处在方位时域时,可通过快速卷积进行距离压缩。
也就是说,距离FFT后随即进行距离向匹配滤波,再利用距离IFFT完成距离压缩。
图1(a)和图1(b)就是这种情况,图1(c)则不同。
2.通过方位FFT将数据变换至距离多普勒域,多普勒中心频率估计以及大部分后续操作都将在该域进行。
3.在距离多普勒域进行随距离时间及方位频率变化的RCMC,该域中同距离上的一组目标轨迹相互生命。
RCMC将距离徙动曲线拉直到与方位频率轴平等的方向。
4.通过每一距离门上的频域匹配滤波实现方位压缩。
5.最后通过方位IFFT将数据变换回时域,得到压缩后复图像。
如果需要,还进行幅度检测及多视叠加。
以下各节将依次讨论包括两种不同二次距离压缩(SRC)实现在内的所有步骤。
讨论基于机载C波段仿真数据,参数如表1所示。
表1距离信号和方位信号采样的差别图1 RDA 的三种实现框图3. 低斜视角下的RDA首先考察无需SRC 的简单低斜视角情况,处理步骤与图1中的基本RDA 相同。
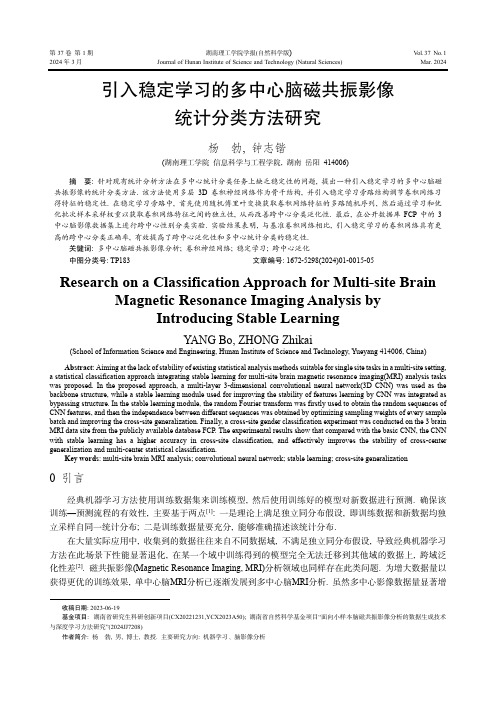
第37卷第1期湖南理工学院学报(自然科学版)V ol. 37 No. 1 2024年3月 Journal of Hunan Institute of Science and Technology (Natural Sciences) Mar. 2024引入稳定学习的多中心脑磁共振影像统计分类方法研究杨勃, 钟志锴(湖南理工学院信息科学与工程学院, 湖南岳阳 414006)摘要:针对现有统计分析方法在多中心统计分类任务上缺乏稳定性的问题, 提出一种引入稳定学习的多中心脑磁共振影像的统计分类方法. 该方法使用多层3D卷积神经网络作为骨干结构, 并引入稳定学习旁路结构调节卷积网络习得特征的稳定性. 在稳定学习旁路中, 首先使用随机傅里叶变换获取卷积网络特征的多路随机序列, 然后通过学习和优化批次样本采样权重以获取卷积网络特征之间的独立性, 从而改善跨中心分类泛化性. 最后, 在公开数据库FCP中的3中心脑影像数据集上进行跨中心性别分类实验. 实验结果表明, 与基准卷积网络相比, 引入稳定学习的卷积网络具有更高的跨中心分类正确率, 有效提高了跨中心泛化性和多中心统计分类的稳定性.关键词:多中心脑磁共振影像分析; 卷积神经网络; 稳定学习; 跨中心泛化中图分类号: TP183 文章编号: 1672-5298(2024)01-0015-05 Research on a Classification Approach for Multi-site Brain Magnetic Resonance Imaging Analysis byIntroducing Stable LearningYANG Bo, ZHONG Zhikai(School of Information Science and Engineering, Hunan Institute of Science and Technology, Yueyang 414006, China) Abstract: Aiming at the lack of stability of existing statistical analysis methods suitable for single site tasks in a multi-site setting, a statistical classification approach integrating stable learning for multi-site brain magnetic resonance imaging(MRI) analysis tasks was proposed. In the proposed approach, a multi-layer 3-dimensional convolutional neural network(3D CNN) was used as the backbone structure, while a stable learning module used for improving the stability of features learning by CNN was integrated as bypassing structure. In the stable learning module, the random Fourier transform was firstly used to obtain the random sequences of CNN features, and then the independence between different sequences was obtained by optimizing sampling weights of every sample batch and improving the cross-site generalization. Finally, a cross-site gender classification experiment was conducted on the 3 brain MRI data site from the publicly available database FCP. The experimental results show that compared with the basic CNN, the CNN with stable learning has a higher accuracy in cross-site classification, and effectively improves the stability of cross-center generalization and multi-center statistical classification.Key words: multi-site brain MRI analysis; convolutional neural network; stable learning; cross-site generalization0 引言经典机器学习方法使用训练数据集来训练模型, 然后使用训练好的模型对新数据进行预测. 确保该训练—预测流程的有效性, 主要基于两点[1]: 一是理论上满足独立同分布假设, 即训练数据和新数据均独立采样自同一统计分布; 二是训练数据量要充分, 能够准确描述该统计分布.在大量实际应用中, 收集到的数据往往来自不同数据域, 不满足独立同分布假设, 导致经典机器学习方法在此场景下性能显著退化, 在某一个域中训练得到的模型完全无法迁移到其他域的数据上, 跨域泛化性差[2]. 磁共振影像(Magnetic Resonance Imaging, MRI)分析领域也同样存在此类问题. 为增大数据量以获得更优的训练效果, 单中心脑MRI分析已逐渐发展到多中心脑MRI分析. 虽然多中心影像数据量显著增收稿日期: 2023-06-19基金项目:湖南省研究生科研创新项目(CX20221231,YCX2023A50); 湖南省自然科学基金项目“面向小样本脑磁共振影像分析的数据生成技术与深度学习方法研究”(2024JJ7208)作者简介: 杨勃, 男, 博士, 教授. 主要研究方向: 机器学习、脑影像分析16 湖南理工学院学报(自然科学版) 第37卷长, 但由于存在机器参数、被试生理参数等诸多不同, 不同中心的数据无法满足独立同分布假设, 导致多中心统计分析表现出较差的稳定性[3,4].为提升多域分析的稳定性, 近年来机器学习理论研究从因果分析角度提出一系列基于线性无关特征采样的稳定预测方法[5,6], 并在低维数据上取得了一定效果, 初步展现出在多域分析上的巨大潜力. Zhang等[7]在此基础上提出稳定学习方法, 扩展了以前的线性框架, 以纳入深度模型. 由于在深度模型中获得的复杂非线性特征之间的依赖关系比线性情况下更难测量和消除[8,9], 因此稳定学习采用了一种基于随机傅里叶特征(Random Fourier Features, RFF)[10]的非线性特征去相关方法; 同时, 为了适应现代深度模型, 还专门设计了一种全局关联的保存和重新加载机制, 以减少训练大规模数据时的存储和计算成本. 相关实验表明, 稳定学习结合深度学习在高维图像识别任务上表现出较好的稳定性[7].本文尝试将稳定学习引入多中心脑MRI 的统计分类任务中, 将稳定学习与3D CNN 结合, 解决跨中心泛化性问题, 提高多中心分类稳定性. 首先介绍本研究设计的融合稳定学习的3D CNN 网络架构; 然后介绍稳定学习特征独立性最大化准则; 最后与基准3D CNN 分别在公开数据集FCP 中的3中心脑MRI 数据集上进行对比分类实验. 实验结果表明, 引入稳定学习的卷积网络具有更高的跨中心分类正确率, 有效提高了多中心脑MRI 统计分类的稳定性.1 融合稳定学习的3D CNN 架构设计融合稳定学习的3D CNN 总体架构设计如图1所示. 首先使用3D CNN 提取脑MRI 的3D 特征, 再将特征分别输出至稳定学习旁路和分类器主路进行训练. 稳定学习旁路使用随机傅里叶变换模块提取3D特征的多路RFF 特征, 然后使用样本加权解相关模块(Learning Sample Weighting for Decorrelation, LSWD)优化样本采样权重. 最后使用样本权重对分类器的预测损失进行加权, 以加权损失最小化为优化目标进行反向传播.图1 融合稳定学习的3D CNN 总体架构设计2 特征独立性最大化2.1 基于随机傅里叶变换的随机变量独立性判定设X 、Y 为两个随机变量, ()X f X 、()Y f Y 、(,)f X Y 分别表示X 的概率密度、Y 的概率密度以及X 和Y 的联合概率密度, 若满足(,)()()X Y f X Y f X f Y =,则称随机变量X 、Y 相互独立.当X 、Y 均服从高斯分布时, 统计独立性等价于统计不相关, 即Conv (,)((())(()))()()()0X Y E X E x Y E Y E XY E X E Y =--=-=,其中Conv (,)⋅⋅为两随机变量之间的协方差, ()E ⋅为随机变量的期望.第1期 杨 勃, 等: 引入稳定学习的多中心脑磁共振影像统计分类方法研究 17在本文深度神经网络中, 随机变量,X Y 就是脑MRI 的3D 特征变量. 设有n 个训练样本, 可将其视为对随机变量,X Y 分别进行了n 次采样, 获得了对应的随机序列12(,,,)n X x x x = 和12(,,,)nY y y y = . 可使用随机序列之间的协方差进行无偏估计:Conv 111()111,1n n n i j i j i j j X Y x x y y n n n ===⎛⎫⎛⎫=-- ⎪ ⎪-⎝⎭⎝⎭∑∑∑ . 需要指出的是, 若,X Y 不服从高斯分布, 则Conv0(),X Y = 不能作为变量独立性判定准则. 文[9]指出, 此情形下可将随机序列,X Y 转换为k 个随机傅里叶变换序列{RFF },){RFF }()(i i k i i kX Y ≤≤后再使用协方差进行判定.随机傅里叶变换公式为RFF ,)()(s i i i X X ωφ+ ~(0,1),i N ω~Uniform(0,2π),iφi <∞. 其中随机频率i ω从标准正态分布中采样得到, 随机相位i φ从0~2π之间的均匀分布中采样得到.通过随机傅里叶变换可获得如下两个随机矩阵RFF(),RFF()n k XY ⨯∈ : 1212RFF()(RFF ,RFF ,,RFF ),R .()())FF()(F ()RF ,RF ,()(F ,RFF ())k kX X X X Y Y Y Y == 计算这两个随机矩阵的协方差矩阵:Conv T111111(((RFF ),RF ()()()(F())RFF RFF RFF RFF 1)n n n i j i j i j j X Y X X Y Y n n n ===⎡⎤=--⎢⎣⎥-⎣⎦⎡⎤⎢⎥⎦∑∑∑ . 若||Conv 2(RFF(),RFF())||0,F X Y = 则可判定随机变量,X Y 相互独立. 本文参照文[6]建议, 固定5k =.2.2 基于样本加权的特征独立性最大化在融合稳定学习的深度神经网络中, 通过LSWD 模块优化样本权重并最大化特征之间的独立性, 优化准则如下:,1,j |arg min |()m i j i L =<=∑w Conv (RFF(w ⨀i Q ), RFF(w ⨀2))||j F Q , T s.t.,n >=0w w e .其中1n i ⨯∈ Q 为网络输出的第i 个特征序列, ⨀为Hamard 乘积运算, 1n ⨯∈ w 为n 个样本的权重, e 为全1向量. 上述优化准则, 可使得深度神经网络输出特征两两之间相互独立.3 实验结果与分析3.1 实验数据与预处理实验数据来自网上公共数据库1000功能连接组计划(1000 Functional Connectomes Project, FCP). 该公共数据库收集了35个中心合计1355名被试的脑MRI 数据. 本实验使用了FCP 中3个中心的数据集, 分别为:北京(Beijing)、剑桥(Cambridge)和国际医学会议(ICBM)[11], 主要任务是使用其中的3D 脑结构MRI 数据完成性别分类. 其中, Beijing 数据集包含被试样本140个(男性70个/女性70个), Cambridge 数据集包含被试样本198个(男性75个/女性123个), ICBM 数据集包含被试样本86个(男性41个/女性45个).在Matlab 2015中使用SPM8工具包对原始脑结构MRI 数据进行如下数据预处理:第1步 脑影像颅骨剥离;第2步 分割去颅骨脑影像为灰质、白质和脑脊液3部分(本实验仅使用灰质数据);第3步 标准化预处理, 将脑影像统一配准到MNI(Montreal Neurological Institute)模版空间;第4步 去噪与平滑预处理, 使用高斯平滑方法平滑标准化灰质影像.预处理后, 最终得到尺寸大小为121×145×121的3D 结构影像.18 湖南理工学院学报(自然科学版) 第37卷此外, 为减少后续计算量, 通过尺度缩放操作将预处理后的3D 结构影像尺寸进一步缩小至64×64×64.然后使用Z-Score 标准化方法对每个中心的数据分别进行中心偏差校正.3.2 分类器参数设置分别测试了基准3D CNN 和融合稳定学习的3D CNN 的多中心脑MRI 分类性能. 其中3D CNN 架构部分,两种分类器均采用同样的网络架构和参数, 具体如下.网络层数设计为5层, 每层包含2个3D 卷积操作(with padding), 2个ReLU 非线性映射操作和1个3D maxpooling 操作(每层窗宽均为2). 其中, 第1层卷积核尺寸为7×7×7, 第2~5层卷积核尺寸均为3×3×3, 1~5层输出通道大小分别为32、64、128、256、512.使用Pytorch 1.12.0平台搭建网络. 训练时, 初始学习率固定为0.001, 使用Adam 优化器进行训练,batchsize 固定为128(男女样本各64个).3.3 跨中心性别分类实验采用域泛化实验设置LOSO(Leave One Site Out)来测试不同分类器的跨中心脑MRI 分类的泛化能力, 即留一个中心数据作为测试数据, 其他中心数据作为训练数据. 在训练过程中, 确保用于测试的中心数据完全隔离. 实验重复三次, 使用不同的随机种子, 取平均值作为最终结果. 跨中心分类平均正确率见表1.表1 跨中心分类平均正确率(%)对比方法 测试中心 总体平均分类正确率(Cambridge, ICBM)-Beijing (Beijing, ICBM)-Cambridge (Cambridge, Beijing)-ICBMbase 75.76 73.91 72.48 74.05stable 78.11 75.59 75.97 76.56* base: 基准3D CNN; stable: 融合稳定学习的3D CNN.由表1可知, 融合稳定学习的3D CNN 在(Cambridge, ICBM)-Beijing 、(Beijing, ICBM)-Cambridge 、(Cambridge, Beijing)-ICBM 三个LOSO 分类测试中平均分类正确率分别提升2.35、1.68、3.49个百分点, 总体平均类正确率则提升2.51个百分点. 实验结果验证了引入稳定学习后, 跨中心泛化性得到明显提升.进一步绘制三个LOSO 分类任务的PR(Precision-Recall)曲线和ROC(Receiver Operating Characteristic)曲线, 并计算AUC(Area Under the Curve), 以评估分类方法的跨中心预测性能, 如图2~3所示.(a) (Cambridge, ICBM)-Beijing (b) (Beijing, ICBM)-Cambridge(c) (Cambridge, Beijing)-ICBM图2 跨中心分类ROC 曲线(a) (Cambridge, ICBM)-Beijing (b) (Beijing, ICBM)-Cambridge(c) (Cambridge, Beijing)-ICBM图3 跨中心分类PR 曲线 图2显示, 在三个LOSO 分类任务中融合稳定学习的3D CNN 的ROC 曲线明显优于基准3D CNN, 其AUC 值也分别提升了0.01, 0.05和0.05. 此外, 由每个LOSO 分类的三次随机实验统计得到的标准差相比基第1期 杨 勃, 等: 引入稳定学习的多中心脑磁共振影像统计分类方法研究 19 准3D CNN 显著下降了1个数量级, 也很好地证实了融合稳定学习的3D CNN 具有很好的多中心分类稳定性. 图3中, 除第1个LOSO 分类任务无法确定两种方法的优劣外, 在后两个LOSO 分类任务上, 融合稳定学习的3D CNN 表现明显优于基准3D CNN.最后绘制三个LOSO 分类任务训练过程中测试正确率变化曲线, 结果如图4所示.(a) (Cambridge, ICBM)-Beijing (b) (Beijing, ICBM)-Cambridge(c) (Cambridge, Beijing)-ICBM图4 跨中心分类训练过程中测试正确率变化情况 图4显示, 三个LOSO 分类任务在训练迭代到100代后, 融合稳定学习的3D CNN 的测试分类正确率稳定优于基准3D CNN, 进一步展示了引入稳定学习的多中心脑MRI 分类的有效性.4 结束语为解决多中心脑MRI 分类的稳定性问题, 本文提出引入稳定学习的统计分类方法, 设计融合稳定学习的3D CNN 架构, 通过学习样本权重提升特征之间的统计独立性, 从而提高对未知中心数据的跨中心预测能力. 通过3中心公共数据集性别分类实验, 最后验证了融合稳定学习的3D CNN 分类模型的有效性. 实验表明, 将稳定学习引入多中心脑MRI 统计分类任务中, 可以改善跨中心分类方法的泛化性能, 从而进一步提高多中心脑MRI 统计分类的稳定性.参考文献:[1] 周志华. 机器学习[M]. 北京: 清华大学出版社, 2016.[2] GEIRHOS R, RUBISCH P, MICHAELIS C, et al. ImageNet-trained CNNs are biased towards texture; increasing shape bias improves accuracy androbustness[EB/OL]. (2018-11-29)[2024-3-20]. https:///abs/1811.12231.[3] ZENG L L, WANG H, HU P, et al. Multi-site diagnostic classification of schizophrenia using discriminant deep learning with functional connectivityMRI[J]. EBioMedicine, 2018, 30: 74−85.[4] 李文彬, 许雁玲, 钟志楷, 等. 基于稳定学习的图神经网络模型[J]. 湖南理工学院学报(自然科学版), 2023, 36(4): 16−18.[5] KUANG K, XIONG R, CUI P, et al. Stable prediction with model misspecification and agnostic distribution shift[C]//Proceedings of the AAAI Conferenceon Artificial Intelligence, 2020, 34(4): 4485−4492.[6] KUANG K, CUI P, ATHEY S, et al. Stable prediction across unknown environments[C]//Proceedings of the 24th ACM SIGKDD International Conferenceon Knowledge Discovery & Data Mining, New York: Association for Computing Machinery, 2018: 1617–1626.[7] ZHANG X, CUI P, XU R, et al. Deep stable learning for out-of-distribution generalization[C]// Proceedings of the IEEE/CVF Conference on ComputerVision and Pattern Recognition, IEEE Computer Society, 2021: 5368−5378.[8] LI H, PAN S J, WANG S, et al. Domain generalization with adversarial feature learning[C]//Proceedings of the IEEE/CVF Conference on Computer Visionand Pattern Recognition, IEEE Computer Society, 2018: 5400−5409.[9] GRUBINGER T, BIRLUTIU A, SCHONER H, et al. Domain generalization based on transfer component analysis[C]//Proceedings of the 13th InternationalWork-Conference on Artificial Neural Networks, Springer, 2015: 325−334.[10] RAHIMI A, RECHT B. Random features for large-scale kernel machines[C]//Proceedings of the 20th International Conference on Neural InformationProcessing Systems, 2007: 1177–1184.[11] JIANG R, ABBOTT C C, JIANG T, et al. SMRI biomarkers predict electroconvulsive treatment outcomes: accuracy with independent data sets[J].Neuropsychopharmacology, 2018, 43(5): 1078−1087.。


基于虚拟阵列变换的共形阵列信号 DOA 估计王瑞革;王法栋【期刊名称】《雷达科学与技术》【年(卷),期】2016(014)004【摘要】Conformal array has the similar shape as the platform surface,and has affect on its kinetic characteristics.Conformal array has wide applications in military and civilian aircraft.An estimation method of 2D-DOA is proposed for conformal array.In the method,virtual array data is built based on array received data.The DOA estimation can be calculated by ESPRIT and MUSIC algorithm.Simulation results demon-strate the effectiveness of the proposed algorithm.%共形阵列是指与载体表面共形的天线阵列,对载体空气动力性能影响小,在军用、民用等飞行器上具有广泛的应用。
针对共形阵列信号处理中的角度估计问题,给出了一种基于虚拟阵列变换思想的共形阵列信号 DOA 估计算法。
该算法首先对接收数据进行虚拟阵列变换,利用变换后的数据,采用 ESPRIT算法和 MUSIC 算法相结合,实现了对共形阵列信号二维角度估计。
算法对阵列形状限制小,真正实现了适用于任意共形阵列。
以圆柱共形阵列为例,通过仿真实验验证了算法的有效性。
【总页数】5页(P448-452)【作者】王瑞革;王法栋【作者单位】中国人民解放军 92785 部队,河北秦皇岛 066200;中国人民解放军92785 部队,河北秦皇岛 066200【正文语种】中文【中图分类】TN911.7【相关文献】1.冲激噪声背景下基于虚拟阵列变换的DOA估计 [J], 韩晓东;刁鸣2.基于酉变换的虚拟阵列DOA估计算法 [J], 闫金山;彭秀艳;王成鹏3.共形阵列信号 DOA 和极化状态联合估计研究 [J], 李杰然;许稼4.基于改进S变换的高频地波雷达阵列信号DOA估计 [J], 田潇潇;刘爱军;李春鹏5.基于平行互质虚拟阵列的低复杂度二维DOA联合估计算法 [J], 李林;余玉龙;韩慧因版权原因,仅展示原文概要,查看原文内容请购买。



收稿日期:2022-06-06基金项目:辽宁省教育厅高等学校基本科研项目(LJKZ0011).作者简介:佘黎煌(1980-)ꎬ男ꎬ福建莆田人ꎬ东北大学讲师ꎬ博士ꎻ张㊀石(1963-)ꎬ男ꎬ辽宁抚顺人ꎬ东北大学教授ꎬ博士生导师.第44卷第10期2023年10月东北大学学报(自然科学版)JournalofNortheasternUniversity(NaturalScience)Vol.44ꎬNo.10Oct.2023㊀doi:10.12068/j.issn.1005-3026.2023.10.005基于斜投影算子的混合信号DOA估计算法佘黎煌ꎬ张剑宇ꎬ张㊀石(东北大学计算机科学与工程学院ꎬ辽宁沈阳㊀110169)摘㊀㊀㊀要:为了提高混合信号的波达方向(directionofarrivalꎬDOA)估计精度并降低其阵列孔径损失ꎬ提出一种基于斜投影算子的高精度DOA估计算法.所提算法将混合信号中独立信号与相干信号分两个阶段进行估计ꎬ首先利用ESPRIT(estimatingsignalparameterviarotationalinvariancetechniques)算法处理阵元接收数据的协方差矩阵ꎬ得到混合信号中独立信号的DOA估计值ꎻ而后利用斜投影算子去除混合信号中独立信号的信息ꎬ得到新的协方差矩阵ꎻ利用新得到的协方差矩阵的信号子空间进行去相干处理ꎻ最后结合ESPRIT算法计算得到相干信号的DOA估计值.仿真结果表明ꎬ相较传统的混合信号DOA估计算法ꎬ所提算法在低信噪比情况下以及信号入射间隔较小的情况下有较高精度ꎬ有效地降低了阵列孔径的损失.在不同的采样快拍数下ꎬ本文算法也表现出更强的鲁棒性.关㊀键㊀词:混合信号ꎻ波达方向估计ꎻ斜投影算子ꎻ信号子空间ꎻESPRIT算法中图分类号:TN911 7㊀㊀㊀文献标志码:A㊀㊀㊀文章编号:1005-3026(2023)10-1401-07DOAEstimationAlgorithmofMixedSignalsBasedonObliqueProjectionOperatorSHELi ̄huangꎬZHANGJian ̄yuꎬZHANGShi(SchoolofComputerScience&EngineeringꎬNortheasternUniversityꎬShenyang110169ꎬChina.Correspondingauthor:SHELi ̄huangꎬE ̄mail:shelihuang@ise.neu.edu.cn)Abstract:InordertoimprovetheDOAestimationaccuracyofmixedsignalsandreducearrayaperturelossꎬahigh ̄precisionDOAestimationalgorithmbasedonobliqueprojectionoperatorisproposed.Theproposedalgorithmestimatestheindependentandcoherentsignalsofthemixedsignalsintwostages.Firstlyꎬthecovariancematrixofthedatareceivedbythearrayelementisprocessedbytheestimatingsignalparameterviarotationalinvariancetechniques(ESPRIT)ꎬandtheDOAestimatesoftheindependentsignalsinthemixedsignalsarecalculated.Thenꎬthealgorithmusestheobliqueprojectionoperatortoremovetheindependentsignalinformationinthemixedsignalstoobtainanewcovariancematrix.Thesignalsubspaceofthenewlyobtainedcovariancematrixisusedfordecoherenceprocessing.FinallyꎬtheESPRITalgorithmisusedtocalculatetheDOAestimatesofthecoherentsignals.SimulationresultsshowthattheproposedalgorithmhashigheraccuracythantraditionalmixedsignalDOAestimationalgorithmsinthecaseoflowsignal ̄to ̄noiseratioandsmallsignalincidenceintervalꎬandeffectivelyreducesarrayapertureloss.Undertheconditionofdifferentsamplingsnapshotnumbersꎬtheproposedalgorithmalsoshowsstrongerrobustness.Keywords:mixedsignalsꎻDOA(directionofarrival)estimationꎻobliqueprojectionoperatorꎻsignalsubspaceꎻESPRITalgorithm㊀㊀阵列信号处理是信号处理的一个重要分支ꎬ它在水声信号探测㊁地震勘测和医疗等领域获得了广泛应用和迅速发展.而波达方向(directionofarrivalꎬDOA)估计是阵列信号处理的一个主要研究方向[1-2].由于通信环境中的同频干扰以及多径传输的存在ꎬ导致入射到阵列的信号中往往会混杂有相干信号.混合信号中的相干信号会使传统的高分辨率算法性能急剧下降ꎬ制约了子空间类算法[3]的发展.因此对混合信号DOA估计的研究具有重要的研究价值与实际意义.混合信号中的相干信号会导致子空间类算法中协方差矩阵秩的亏损ꎬ从而导致子空间类算法的失效.解相干的经典方法主要有两类:一类是降维处理ꎬ比如前后向空间平滑算法[4]ꎬ通过划分子阵的方式来恢复协方差矩阵的秩[5]ꎬ有良好的解相干性能ꎬ但存在阵列孔径损失和在低信噪比情况下解相干性能降低等问题ꎻ另一类则是不进行降维处理ꎬ通过重构Toeplitz矩阵来实现解相干[6]ꎬ虽然不会损失阵列孔径ꎬ但会增加计算复杂度并且性能降低.针对前后向空间平滑算法无法充分利用协方差矩阵信息的问题ꎬ文献[7]提出了改进的空间平滑算法ꎬ不仅利用了单个子阵的协方差矩阵ꎬ而且利用了不同子阵列的交叉协方差矩阵ꎬ但仍存在对噪声的鲁棒性低ꎬ在低信噪比情况下对小间隔的入射信号估计误差较大等问题.文献[8]对此作出改进ꎬ提出了ESS-SS算法ꎬ该算法在全相干信号的情况下表现出非常优异的性能ꎬ但在混合信号的情况下并无明显改进.文献[9]中针对混合信号提出了一种两阶段的DOA估计算法ꎬ首先估计混合信号中的独立信号ꎬ然后利用空间差分的方法去除混合信号中独立信号的信息ꎬ最后通过空间平滑算法来得到相干信号方位角.该算法在低信噪比时对独立信号估计较为准确ꎬ提高了阵列孔径ꎬ但空间差分法会导致相干信号信息的不完整ꎬ并且该算法在小信号间隔下表现一般.本文提出一种两阶段的DOA估计算法ꎬ首先利用ESPRIT算法[3]估计混合信号中的独立信号信息ꎬ而后利用斜投影算子构造仅包含相干信号信息的协方差矩阵ꎬ最后利用新构造的协方差矩阵的信号子空间进行去相干处理ꎬ从而得到相干信号的DOA估计信息.仿真结果证明本文所提算法在低信噪比㊁小快拍数以及入射角度间隔较小时波达方向估计有更加优越的性能.1㊀混合信源信号模型假设存在M个满足远场条件的各向同性的阵元组成的均匀线阵模型.同时有K个独立信号与相干信号组成的远场窄带混合信号作用在均匀线阵上ꎬ入射角度为θk(k=1ꎬ2ꎬ ꎬK).均匀线阵的阵元间隔为入射目标信号的半波长ꎬ即d=λ/2.以第一个阵元为参考阵元ꎬ可以得到阵列的方向向量为a(θk)=[1ꎬe-j2πλdsin(θk)ꎬ ꎬe-j2πλd(M-1)sin(θk)]T.(1)此时ꎬ第m个阵元的输出为xm(t)=ðKk=1sk(t)e-j2πλd(m-1)sinθk+nm(t).(2)式中:sk(t)为由天线阵列接收到第k个信源信号ꎻnm(t)表示第m个阵元上的高斯白噪声ꎬ方差为σ2.假设K个信号中包含Ku个独立信号和Kc个相干信号ꎬ而Kc个相干信号分为L组ꎬ每组相干信号相互独立ꎬ数目设置为Pk(k=1ꎬ ꎬL).由以上的假设可以得到均匀线阵在t时刻接收到的数据矢量为X(t)=[x1(t)ꎬx2(t)ꎬ ꎬxM(t)]T=ðLi=1ðPik=1a(θik)γiksi(t)+ðKi=Kc+1a(θi)si(t)+N(t)=AcΓSc(t)+AuSu(t)+N(t)=AS(t)+N(t).(3)式中:X(t)为阵列接收数据矢量ꎻa(θik)为第i组相干信号中第k个信号的方向向量ꎻγik为第i组相干信号中第k个多径信号的衰减系数ꎻsi(t)为第i组信号的生成信号源ꎻN(t)为噪声矢量ꎬ均值为零ꎬ方差为σ2nꎬN(t)=N1(t)+N2(t)ꎻΓ为各组相干信号源的相干系数组成的对角矩阵ꎻSc(t)=[s1(t)ꎬs2(t)ꎬ ꎬsL(t)]T为相干信号的生成信号ꎻSu(t)=[sKc+1(t)ꎬ ꎬsK(t)]T为独立信号ꎻAc=[a(θ11)ꎬ ꎬa(θ1P1)ꎬ ꎬa(θL1)ꎬ ꎬa(θLPL)]是相干信号流型矩阵ꎻAu=[a(θKc+1)ꎬ ꎬa(θK)]表示独立信号的流型矩阵ꎻA=[AcΓ㊀Au]表示阵列的流型矩阵.通过式(3)可以得到理想观测数据的协方差矩为R=E[X(t)XH(t)]=ARsAH+σ2nIM=AuRuAHu+AcRcAHc+σ2nIM.(4)式中:Rs为目标信号源的协方差矩阵ꎻRu为独立信号源的协方差矩阵ꎻRc为相干信号源的协方差矩阵ꎻIM为MˑM维的单位矩阵.2㊀本文方法描述2 1㊀ESPRIT算法解决非相干信号的DOA估计ꎬESPRIT算法可以达到高分辨率估计的效果.假设信号模型中K个入射信号均为独立信号ꎬ将前M-1个阵元组成第1个子阵ꎬ后M-1个阵元组成第2个子2041东北大学学报(自然科学版)㊀㊀㊀第44卷㊀㊀㊀㊀阵ꎬX1表示第1个子阵接收到的来波信号ꎬX2表示第2个子阵接收到的来波信号ꎬ将阵列的流型矩阵分块:A=A1e1éëêêùûúú=e2A2éëêêùûúú.(5)式中:A1是第1个子阵的流型矩阵ꎬ由A的前M-1行构成ꎻA2是第2个子阵的流型矩阵ꎬ由A的后M-1行构成ꎻe1是A的第1行ꎻe2是A的最后1行.此时有X1=A1S(t)+N1(t)ꎬ(6)㊀X2=A2S(t)+N2(t)=A1ΦS(t)+N2(t).(7)式中ꎬΦ=diag[e-j2πdλsinθ1ꎬe-j2πdλsinθ2ꎬ ꎬe-j2πdλsinθK]ꎬ表示两阵列的延迟相位.将两个子阵联立得到新的模型为Xe=X1X2éëêêùûúú=A1A1ΦéëêêùûúúS(t)+N1(t)N2(t)éëêêùûúú= AS(t)+Ne(t).(8)其协方差矩阵为Re=E[XeXHe]= ARs AH+RN.(9)对Re进行特征分解得到Re=UseΣSUHse+UNΣNUHN.(10)由于信号子空间Use与流型矩阵 A张成相同的子空间ꎬ所以对Use与 A存在唯一可逆矩阵ξ使得Use= Aξ=US1US2éëêêùûúú=A1A1Φéëêêùûúúξ.(11)由此可以得到US2=US1ξ-1Φξ=US1Ψꎬ(12)Ψ=U+S1US2=ξ-1Φξ.(13)因此有Φ=ξΨξ-1=㊀diag[e-j2πdλsinθ1ꎬe-j2πdλsinθ2ꎬ ꎬe-j2πdλsinθK].(14)对角阵Φ包含所有的方位角信息.由式(14)可知Φ由Ψ的特征值构成ꎬ将Ψ特征分解即可求得Φꎬ通过Φ可得到独立信号源的方位角.2 2㊀斜投影算子在DOA估计中ꎬ斜投影算子可以提取期望信号ꎬ滤除干扰信号的影响[10-11].从文献[10]中得知斜投影算子的定义ꎬ对于线性子空间H与零空间Qꎬ斜投影算子EH/Q是一个非正交投影ꎬ可表示为EH|Q=H(HHPʅQH)-1HHPʅQ.(15)式中ꎬPʅQ表示由Q张成的零空间的正交补集ꎬ即PʅQ与Q的乘积为零.由式(15)可推导出斜投影算子的两个主要性质:第一ꎬ斜投影算子EH/Q与线性子空间H的乘积仍为Hꎻ第二ꎬ斜投影算子EH/Q与零空间Q的乘积为零.利用这两个性质可以滤除混合信号中的独立信号信息.在DOA估计中ꎬ假设有K1个入射角度已知的信号ꎬ流型矩阵为AyꎬK2个期望信号ꎬ即入射角度未知的信号ꎬ流型矩阵为Anꎬ则此时斜投影算子为EAy|An=Ay(AHyPʅAnAy)-1AHyPʅAn.(16)式中ꎬPʅAn=I-An(AHnAn)-1AHnꎬ即An的正交补.但在实际运算中ꎬ由于An是未知的ꎬ所以无法直接得到EAy|An.根据文献[10]可知ꎬ可以使用R#来代替PʅAn从而计算EAy|An:EAy|An=Ay(AHyR#1Ay)-1AHyR#1.(17)式中ꎬR#1=(RH1R1)-1RH1ꎬR1表示去除噪声后的协方差矩阵.2 3㊀基于斜投影的混合信号DOA估计算法ESPRIT算法是一种极具代表性的子空间分解类算法ꎬ对于不相关信号的估计具有极佳的性能.但混合信号中的相干信号会造成矩阵秩的亏损ꎬ从而导致此算法失效[12].ESPRIT算法虽然无法直接用于估计混合信号中的所有信号ꎬ但是可以首先用于估计混合信号中的独立信号[13-14].因此ꎬ为了解决混合信号的DOA估计问题ꎬ本文提出了一种基于斜投影算子的DOA分段估计算法.算法分为两个阶段ꎬ第一阶段是对独立信号的角度估计ꎬ第二阶段是对相干信号的角度估计.2 3 1㊀独立信号的波达方向估计以第1节中的混合信号模型为研究基础ꎬ第一阶段首先是对混合信号中的Ku个独立信号进行估计.对协方差矩阵R进行特征值分解ꎬ得到R=UsΛsUHs+UnΛnUHn.(18)式中:Λs为R的K个大特征值组成的对角阵ꎻUs的列向量张成信号子空间ꎬ与Λs中的特征值相对应ꎻΛn为R的M-K个较小的特征值组成的对角阵ꎻUn的列向量张成噪声子空间ꎬ与Λn中的特征值相对应.根据ESPRIT算法的原理可知ꎬ存在唯一非奇异矩阵Ξ使得Us=AΞꎬ将Us分割成(M-1)ˑK的两个重叠的子阵:Us=U1u1éëêêùûúú=u2U2éëêêùûúú.(19)式中:u1和u2分别为信号子空间的最后一行与第一行ꎻU1=A1ΞꎬU2=A1ΦΞ.由式(13)可知ꎬ此处ꎬΨ=U+1U2=Ξ-1ΦΞ.(20)3041第10期㊀㊀㊀佘黎煌等:基于斜投影算子的混合信号DOA估计算法对Ψ进行特征分解即可得到对角矩阵Ф.Ф由Ψ的特征值组成ꎬ包含混合信号的所有信息.其中不相关信号源的特征值的模等于1ꎬ而相干信号源的特征值的模均小于1.利用此特性可以首先完成混合信号中独立信号的估计.在实际的测向环境中ꎬ由于噪声㊁快拍数据不理想等因素的影响ꎬ不相关信号的特征值不会严格等于1.此时ꎬ选取Ku个模值最接近1的特征值.令δi=μi-1ꎬi=1ꎬ2ꎬ ꎬK.(21)式中ꎬμi为Ψ的特征值ꎬ即Ф中的对角元素.将μi依次代入式(21)中ꎬ得到使δi最小的Ku个特征值ꎬ即为独立信号的特征值.假设求得的特征值为{μ1ꎬ ꎬμKu}ꎬKu个特征值对应的角度分别为{θμ1ꎬ ꎬθμKu}ꎬ则可以得到独立信号的DOA估计值为㊀θi=arcsinλ-j2πdθμiæèçöø÷ꎬ㊀i=1ꎬ2ꎬ ꎬKu.(22)2 3 2㊀相干信号的波达方向估计在得到独立信号的DOA估计值后ꎬ进入算法的第二阶段ꎬ即估计混合信号中的相干信号.此时ꎬ相干信号为期望信号ꎬ独立信号为干扰信号ꎬ通过斜投影算子去除干扰信号的信息从而得到只包含相干信号信息的矩阵.首先ꎬ根据独立信号的DOA估计值ꎬ可以得到独立信号的流型矩阵为Au=[α(θ1)㊀α(θ2)㊀ ㊀α(θKu)].(23)由式(17)可知ꎬ斜投影算子EAu|Ac为EAu|Ac=Au(AHuR#1Au)-1AHuR#1.(24)利用斜投影算子可以去除R中独立信号的信息.为了去除噪声的影响ꎬ重新构造协方差矩阵:Rs=UsΛsUHs.(25)利用协方差矩阵Rs以及斜投影算子EAu|Ac可以计算得到协方差矩阵Rc:Rc=(IM-EAu|Ac)Rs(IM-EAu|Ac)H.(26)新的协方差矩阵Rc中仅包含相干信号信息ꎬ下面将对其进行证明:Rc=(IM-EAu|Ac)Rs(IM-EAu|Ac)H=(IM-EAu|Ac)UsΛsUHs(IM-EAu|Ac)H=(IM-EAu|Ac)AΞΛsΞHAH(IM-EAu|Ac)H=(IM-EAu|Ac)[AcΓ㊀Au]ΞΛsΞH[AcΓ㊀Au]Hˑ(IM-EAu|Ac)H=[AcΓ㊀0MˑKu]ˑΞΛsΞH[AcΓ㊀0MˑKu]H.(27)令Λ=ΞΛsΞHꎬ取Λ的前Kc行ꎬ前Kc列的子阵为Λ1ꎬ则有Rc=AcΓΛ1ΓHAHc.(28)由式(28)可知ꎬ式(26)中Rc仅包含相干信号的信息.因此ꎬ通过去相干恢复协方差矩阵Rc的秩ꎬ即可应用常规子空间算法得到相干信号的DOA估计值.在去相干过程中ꎬ传统算法多使用空间平滑的方法对Rc直接进行平滑处理ꎬ此方法存在无法估计小间隔信号以及低信噪比条件下性能不佳等缺陷.为了解决这些问题ꎬ本文算法借鉴了文献[8]中ESS-SS算法恢复协方差矩阵秩的思想ꎬ对协方差矩阵的信号子空间进行平滑处理ꎬ重构新的恢复秩的协方差矩阵.将Rc进行特征分解ꎬ得到Rc=UscΛcUHsc+UncΛncUHnc.(29)式中:Λc为Rc的L个大特征值组成的对角阵ꎻUsc为M行L列的矩阵ꎬ其列向量张成信号子空间ꎬ与Λc中的特征值相对应ꎻΛnc为Rc的M-L个较小的特征值组成的对角阵ꎻUnc的列向量张成噪声子空间ꎬ与Λnc中的特征值相对应.将Usc纵向依次划分为N个重叠的P(P>L)行L列的子矩阵ꎬN与P满足N+P-1=Mꎬ则第i(i=1ꎬ2ꎬ ꎬN)个子矩阵由Usc的第i行到第i+P-1行构成ꎬ假设其为Viꎬ定义Vii=ViΛcVHiꎬ利用Vii构造新的协方差矩阵来恢复原协方差矩阵Rc的秩:Rf=12NðNi=1ðNj=1{ViiVjj+ Vii Vjj}.(30)式中ꎬ Vii=JV∗iiJꎬV∗ii为Vii的复共轭矩阵ꎬJ为反向单位矩阵.将Rf代入ESPRIT算法中ꎬ即可实现对混合信号中相干目标信号的DOA估计.本文算法的整体实现过程如下:1)㊀根据式(4)构造数据观测矩阵的协方差矩阵Rꎬ并对R进行特征分解ꎬ得到信号子空间Usꎻ2)㊀根据式(19)将信号子空间分块ꎬ并利用式(20)计算Ψ并对其进行特征分解ꎻ3)㊀选取Ψ特征值的模值最接近1的Ku个特征值ꎬ根据式(22)计算得到独立信号的DOA估计值ꎻ4)㊀根据式(1)和式(23)计算独立信号的流型矩阵ꎻ5)㊀根据式(24)计算斜投影算子并根据式(26)计算得到去除独立信号信息的协方差矩阵Rcꎻ6)㊀通过式(30)对Rc进行去相干处理ꎬ得到秩恢复的协方差矩阵Rfꎻ7)㊀将Rf进行特征分解ꎬ利用ESPRIT算法4041东北大学学报(自然科学版)㊀㊀㊀第44卷㊀㊀得到混合信号中相干信号的DOA估计角度.3㊀实验验证与比较针对提出的基于斜投影算子的混合信源的DOA分段估计算法的性能进行测试.为了验证本文算法的各项性能ꎬ仿真实验中对比了文献[7]中的ISS算法㊁文献[8]中的ESS-SS算法以及文献[9]中的基于空间差分技术的DOA估计算法.其中ꎬISS算法与ESS-SS算法为空间平滑算法的改进算法ꎬ直接对全部的混合信号进行DOA估计.文献[9]中算法与本文算法同为两阶段的DOA估计算法ꎬ将独立信号与相干信号分别进行DOA估计.3 1㊀验证算法的有效性为了验证本文算法的有效性ꎬ以成功检测概率为指标.成功检测概率即全部蒙特卡洛实验中成功估计入射信号的概率ꎬ通过DOA估计成功的实验次数与全部的实验次数之比得到.实验1㊀阵列设置为8阵元的均匀线阵ꎬ阵元间距为信号半波长ꎬ假设有3个入射信号ꎬ其中前2个信号为一组相干信号ꎬ分别为-15ʎ和5ʎꎬ两个相干目标信号对应的衰减系数设置为[1ꎬ0 9]ꎬ第3个信号为独立信号ꎬ设为50ʎ.采样快拍数为500ꎬ信噪比以3dB为间隔从-15dB增加到15dBꎬ进行500次蒙特卡洛实验.由图1可知ꎬ4种算法对混合信号源DOA估计的成功概率均随信噪比的增加而增大ꎬ在信噪比大于0dB时ꎬ4种算法均能有效地对混合信号源进行DOA估计.图1㊀不同信噪比环境下4种算法的成功检测概率Fig 1㊀SuccessfulestimationprobabilityofthefouralgorithmsunderdifferentSNRenvironments3 2㊀本文算法的精度实验为了验证本文算法的DOA估计精度ꎬ以估计角度的均方根误差(RMSE)作为衡量算法准确性的标准.RMSE=1KˑWðWw=1ðKk=1[θ^k(w)-θk]2.(31)式中:W为蒙特卡洛实验的总次数ꎻK为入射信号源的数量ꎻθk为实际的入射角度ꎻθ^k(w)为第w次实验中第k个入射角度的DOA估计值.下面将在不同的入射信源个数㊁不同的信噪比以及不同的快拍数条件下分别实验.实验2㊀阵列设置为8阵元的均匀线阵ꎬ阵元间距为信号半波长ꎻ假设入射信号源为3个ꎬ前2个入射信号是相干的ꎬ设为10ʎ和15ʎꎬ对应的衰减系数设置为[1ꎬ0 9]ꎬ第3个入射信号为独立信号ꎬ设为50ʎ.采样快拍数为500ꎬ信噪比以3dB的间隔从-15dB增加到15dBꎬ分别进行500次蒙特卡洛实验计算估计角度的均方根误差.由图2可知ꎬ在入射角度相隔较小的条件下ꎬ4种算法的均方根误差均随信噪比的增加呈下降趋势ꎬ在信噪比低于-3dB时ꎬ本文算法的均方根误差明显低于其他3种算法.同时ꎬ本文算法更加接近算法的无偏估计量下界(CRB)[15]ꎬ相较其他算法拥有更高的DOA估计精度.图2㊀不同信噪比环境下4种算法DOA估计精度对比(实验2)Fig 2㊀ComparisonofDOAestimationaccuracyofthefouralgorithmsunderdifferentSNRenvironments(No.2experiment)实验3㊀阵列模型以及入射信源角度同实验2ꎬ信噪比固定为0dB不变ꎬ采样快拍数以50为间隔从100增加至600ꎬ每种快拍数条件下进行500次蒙特卡洛实验ꎬ计算估计角度的均方根误差ꎬ实验结果如图3所示.5041第10期㊀㊀㊀佘黎煌等:基于斜投影算子的混合信号DOA估计算法㊀㊀㊀㊀图3㊀4种算法的均方根误差与快拍数之间的关系Fig 3㊀RelationshipbetweenRMSEofthefouralgorithmsandthenumberofsnapshots由图3可知ꎬ在其他条件固定时ꎬ4种算法的DOA估计精度总体会随着快拍数的增加而提高.在快拍数较小时ꎬ文献[9]中算法DOA估计精度较低.而本文提出的算法与ISS算法以及ESS-SS算法的曲线随快拍数的变化相对较为平稳并且更加接近无偏估计量下界CRBꎬ拥有更高的DOA估计精度及更强的鲁棒性.实验4㊀阵列设置为9个阵元的均匀线阵ꎬ阵元间距为信号半波长.入射信源的数量增加为6个.混合信源中独立信源的数量设为2个ꎬ入射角度分别为-10ʎ和60ʎꎬ相干信源设为两组ꎬ第1组为-60ʎ和-40ʎꎬ衰减系数设置为[1ꎬ0 9]ꎬ第2组为20ʎ和50ʎꎬ衰减系数设置为[1ꎬ0 8].采样数及信噪比变化同实验1ꎬ进行500次蒙特卡洛实验来计算估计角度的均方根误差ꎬ实验结果如图4所示.图4㊀不同信噪比环境下4种算法DOA估计精度对比(实验4)Fig 4㊀ComparisonofDOAestimationaccuracyofthefouralgorithmsunderdifferentSNRenvironments(No.4experiment)由图4可知ꎬ在存在多个独立信源与多组相干信源时ꎬ随着信噪比的增加ꎬ4种算法的精度均得到了有效提升.在信噪比低于-6dB时ꎬ其余的3种算法失效ꎬ在信噪比较高的条件下4种算法均能得到有效的估计角度.本文算法的精度在不同的信噪比环境下较其他3种算法均有明显的提升.实验5㊀均匀线阵设置同实验4.继续增加入射信源的数量ꎬ总信源数设置为8个.混合信源中独立信源设为3个ꎬ入射角度分别为-10ʎꎬ40ʎ和60ʎ.相干信号源设置为两组ꎬ第1组包含3个相干信源ꎬ分别为-10ʎꎬ-40ʎ和-60ʎꎬ衰减系数设置为[1ꎬ0 93ꎬ0 84]ꎬ第2组包含2个相干信源ꎬ分别为20ʎ和50ʎꎬ衰减系数设置为[1ꎬ0 9].采样快拍数固定为500ꎬ信噪比变化同实验3ꎬ进行500次蒙特卡洛实验.由图5可知ꎬ在信源数目增加到8个时ꎬISS算法和ESS-SS算法已经失效ꎬ而本文算法与文献[9]中算法仍有较为良好的估计效果并且本文算法的最终结果更优.前两种算法是对混合信源的所有信号直接估计ꎬ并且因为划分子阵而导致阵列孔径变小ꎬ所以可估计的总信源数相对较少.本文所提算法与文献[9]中算法为分段式DOA估计ꎬ相较传统的DOA估计算法可以突破阵列规模的限制从而估计更多的入射角度.在本实验中ꎬ来自独立信号源中的-10ʎ与第1组相干信号源中的-10ʎ被成功地检测出来ꎬ这是因为独立信源与相干信源是分两个步骤进行估计的ꎬ这也是本文所提算法的优势.图5㊀不同信噪比环境下4种算法DOA估计精度对比(实验5)Fig 5㊀ComparisonofDOAestimationaccuracyofthefouralgorithmsunderdifferentSNRenvironments(No.5experiment)4㊀结㊀㊀论针对混合信号的DOA估计中精度损失与阵6041东北大学学报(自然科学版)㊀㊀㊀第44卷列孔径损失的问题ꎬ本文提出了一种基于斜投影算子的高精度DOA分段估计算法.本文算法将混合信号的DOA估计分为两个阶段ꎬ第一阶段是对独立信号的估计ꎬ通过ESPRIT算法完成ꎬ第二阶段则是对相干信号的估计.在第二阶段中ꎬ首先利用斜投影算子去除独立信号的信息ꎬ得到仅包含相干信号信息的协方差矩阵ꎬ而后利用新得到的协方差矩阵的信号子空间进行去相干处理ꎬ最后结合ESPRIT算法估计相干信号的波达方向.仿真实验结果表明ꎬ相较传统算法ꎬ本文提出的算法有效地提升了阵列的孔径ꎬ能够有效地区分小间隔的入射信号ꎬ在快拍数少以及信噪比较低的情况下仍有较好的DOA估计性能.参考文献:[1]㊀JaaferZꎬGoliSꎬElameerAS.BestperformanceanalysisofDOAestimationalgorithms[C]//20181stAnnualInternationalConferenceonInformationandSciences(AiCIS).Fallujahꎬ2018:235-239.[2]㊀JiangXQꎬQianSS.DOAestimationofcoherentsignalsbasedonmodifiedMUSICalgorithm[C]//2021IEEE3rdInternationalConferenceonCivilAviationSafetyandInformationTechnology(ICCASIT).Changshaꎬ2021:918-921.[3]㊀RoyRꎬPaulrajAꎬKailathT.Estimationofsignalparametersviarotationalinvariancetechniques ESRRIT[J].IEEETransactionsonAcousticsꎬSpeechꎬandSignalProcessingꎬ1989ꎬ37(7):984-995.[4]㊀PillaiSUꎬKwonBH.Forward/backwardspatialsmoothingtechniquesforcoherentsignalidentification[J].IEEETransactionsonAcousticsꎬSpeechꎬandSignalProcessingꎬ1989ꎬ37(1):8-15.[5]㊀KarmousNꎬElHassanMOꎬChoubeniF.AnimprovedESPRITalgorithmforDOAestimationofcoherentsignals[C]//2018InternationalConferenceonSmartCommunicationsandNetworking(SmartNets).YasmineHammametꎬ2018:1-4.[6]㊀ZhangWꎬHanYꎬJinMꎬetal.AnimprovedESPRIT ̄likealgorithmforcoherentsignalsDOAestimation[J].IEEECommunicationsLettersꎬ2020ꎬ24(2):339-343. [7]㊀DongMꎬZhangSHꎬWuXDꎬetal.Ahighresolutionspatialsmoothingalgorithm[C]//2007InternationalSymposiumonMicrowaveꎬAntennaꎬPropagationandEMCTechnologiesforWirelessCommunications.Hangzhouꎬ2007:1031-1034. [8]㊀PanJJꎬSunMꎬWangYDꎬetal.AnenhancedspatialsmoothingtechniquewithESPRITalgorithmfordirectionofarrivalestimationincoherentscenarios[J].IEEETransactionsonSignalProcessingꎬ2020ꎬ68:3635-3643. [9]㊀ShiHPꎬLengWꎬWangAGꎬetal.DOAestimationformixeduncorrelatedandcoherentsourcesinmultipathenvironment[J].InternationalJournalofAntennasandPropagationꎬ2015ꎬ2015:1-8.[10]XuXꎬYeZꎬPengJ.Methodofdirection ̄of ̄arrivalestimationforuncorrelatedꎬpartiallycorrelatedandcoherentsources[J].IETMicrowavesꎬAntennas&Propagationꎬ2007ꎬ1(4):949-954.[11]ZuoWLꎬXinJMꎬZhengNNꎬetal.Subspace ̄basednear ̄fieldsourcelocalizationinunknownspatiallynonuniformnoiseenvironment[J].IEEETransactionsonSignalProcessingꎬ2020ꎬ68:4713-4726.[12]张石ꎬ许方晗ꎬ佘黎煌ꎬ等.基于重构噪声子空间的相干信号DOA估计[J].东北大学学报(自然科学版)ꎬ2021ꎬ42(12):1696-1700.(ZhangShiꎬXuFang ̄hanꎬSheLi ̄haungꎬetal.DOAestimationofcoherentsignalsbasedonreconstructnoisesubspace[J].JournalofNortheasternUniversity(NaturalScience)ꎬ2021ꎬ42(12):1696-1700.)[13]GanLꎬLuoXY.Direction ̄of ̄arrivalestimationforuncorrelatedandcoherentsignalsinthepresenceofmultipathpropagation[J].IETMicrowavesAntennas&Propagationꎬ2013ꎬ7(9):746-753.[14]胡盈绮ꎬ邓科ꎬ殷勤业.采用前向空间平滑分组的混合信号波达方向估计算法[J].西安交通大学学报ꎬ2020ꎬ54(9):164-172.(HuYing ̄qiꎬDengKeꎬYinQin ̄ye.Directionofarrivalestimationmethodformixedsignalsbyforwardspatialsmoothgrouping[J].JournalofXi anJiaotongUniversityꎬ2020ꎬ54(9):164-172.)[15]StoicaPꎬLarssonEGꎬGershmanAB.ThestochasticCRBforarrayprocessing:atextbookderivation[J].IEEESignalProcessingLettersꎬ2001ꎬ8(5):148-150.7041第10期㊀㊀㊀佘黎煌等:基于斜投影算子的混合信号DOA估计算法㊀㊀。


一种小斜视多接收阵合成孔径声呐距离多普勒成像算法吕金华;唐扶光;赵煦;吴浩然【摘要】本文在\"非停走停\"条件下建立斜视多接收阵合成孔径声呐的几何模型和精确距离史.由于精确时延史十分复杂,无法直接用于推导成像算法,通过2次近似,得到修正斜视距离史.距离史误差的分析结果表明,修正斜视距离史能够满足窄波束小斜视的成像要求.在算法推导部分,首先通过距离空变的相位补偿因子和参考距离上的时延补偿因子,将多接收阵信号转变成了单基斜视信号,再借用斜视单基距离多普勒算法,提出小斜视角多接收阵合成孔径声呐距离多普勒算法.最后通过计算机仿真实验证明了本文方法的有效性和正确性.【期刊名称】《舰船科学技术》【年(卷),期】2019(041)007【总页数】6页(P124-129)【关键词】斜视;多接收阵合成孔径声呐;距离多普勒算法【作者】吕金华;唐扶光;赵煦;吴浩然【作者单位】武汉船舶职业技术学院电气与电子工程学院,湖北武汉 430050;武汉轻工大学电气与电子工程学院,湖北武汉 430023;武汉轻工大学电气与电子工程学院,湖北武汉 430023;海军工程大学电子工程学院,湖北武汉 430033【正文语种】中文【中图分类】TB5660 引言合成孔径声呐(synthetic aperture sonar,SAS)利用小尺寸基阵沿运动方向做匀速直线运动来合成大的孔径基阵,获得沿运动方向(横向)的高分辨率[1]。
海流和载体平台的非对称等因素,可能导致合成孔径声呐出现斜视。
另外,由于多子阵合成孔径声呐的斜视角会导致时延误差以及声呐多普勒效应比雷达显著,即使斜视角很小,也会导致合成孔径声呐图像散焦。
斜视合成孔径声呐与斜视合成孔径雷达信号模型最大的不同有两点:一是由于水中声速低,造成方位频率不模糊和距离不模糊存在矛盾。
为了解决这个矛盾。
合成孔径声呐的接收阵一般采用多子阵配置[2]。
在现有的斜视合成孔径成像算法中,仅有单接收阵斜视合成孔径成像算法,包括单站斜视合成孔径雷达成像算法和双基单接收阵斜视合成孔径成像算法。

R D成像算法分析(总9页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--RD成像算法分析摘要本文是雷达成像原理的第一次课程作业。
在此次作业中我完成了对已提供RD算法的Matlab程序的分析,并且根据自己对该算法的理解重新编写了Matlab程序,用它对RADARSAT-1的真实回波数据进行了成像实验。
本文分三部分:第一部分对经典RD算法做了一个简单的介绍;第二部分对已提供RD算法的Matlab程序进行了分析;第三部分用自己编写的RD算法的Matlab程序对RADARSAT-1的真实回波数据进行了成像实验,并给出了实验结果。
一、 经典RD 算法简介RD (Range Doppler )算法是一种非常经典的SAR 成像算法。
虽然它有着比较长的历史,但它鲜明的特点使得它能“长盛不衰”,在一些SAR 系统中,它是一种实际采用的成像算法。
经典的RD 算法只考虑了相位展开的一次项,它分为三个步骤:距离压缩(Range Compression ,RC )、距离迁移校正(Range Cell Migration Correction ,RCMC )和方位压缩(Azimuth Compression ,AC )。
其中RCMC 既可以在Range-Doppler 域完成,也可以在Frequency-Azimuth Range 域完成。
它的流程如错误!未找到引用源。
所示。
图 1 经典RD 算法流程图(a )Range-Doppler 域RCMC(b )Frequency-Azimuth Range 域RCMC二、RD算法的Matlab程序分析已提供的RD算法Matlab程序是严格基于错误!未找到引用源。
(a)中的流程进行编写的。
由于该程序并没有特别新颖的地方,所以本文只利用该程序对RD算法作进一步的理解,而将工作重点主要放在对RADARSAT-1真实回波数据的成像上。
该程序可以分为六个小部分:设定参数、模拟回波、RC、RCMC、AC以及结果显示。

相控阵雷达多波束形成成像算法相控阵雷达(Phased Array Radar)是一种采用多个雷达天线单元,通过精确的相位控制实现波束的形成和多波束成像的雷达系统。
相控阵雷达具有快速扫描、高度定位精度和抗干扰能力强等优势,被广泛应用于军事和民用领域。
在相控阵雷达中,多波束成像算法是实现目标探测和识别的关键技术之一多波束成像算法通过采集多个波束的回波信号,并将其综合分析,提取目标的信息。
常见的多波束成像算法包括波达矢量法(Wavenumber Vector Algorithm)、最大似然法(Maximum Likelihood Method)、最小二乘法(Least Squares Method)等。
波达矢量法是一种常用的多波束成像算法。
它基于多通道相控阵雷达的输出数据,对每个源波束进行相干合成,得到新的波束,以获得更高分辨率的成像结果。
具体步骤如下:1.在相控阵雷达中,多个天线单元分别接收到目标的回波信号,并将信号进行变频处理,转换为基带信号。
2.对于每个源波束,通过给每个天线单元施加不同的相位延迟,实现波束的方向性选择。
通过相位延迟控制,可以控制波束的形成方向。
3.对接收到的回波信号进行时域和频域处理,获得目标的空时信息。
4.对每个源波束的输出信号进行相干合成,得到新的波束。
5.对新的波束进行后续的信号处理和成像算法,获得目标的成像结果。
最大似然法是一种基于统计学的多波束成像算法。
它假设目标的回波信号满足高斯分布,并利用最大似然估计方法,通过最大化似然函数,计算出目标的位置和幅度信息。
最小二乘法是一种通过最小化误差平方和的方法,进行多波束成像的算法。
它根据每个源波束的输出信号和目标位置的关系,建立数学模型,通过求解最小二乘问题,得到目标的位置和幅度估计结果。
总之,多波束成像算法是相控阵雷达中的重要技术,通过采集多个波束的回波信号,并利用合适的算法进行信号处理和成像分析,可以实现目标的快速探测和精确定位。

阵列信号的DOA(方向角)算法是一种用于估计信号源方位角的方法,主要应用于信号处理和阵列信号处理领域。
这些算法通过分析接收到的阵列信号,利用信号之间的相位差异和幅度差异,来估计信号的来源方向。
以下是一些常见的阵列信号DOA算法:
1. 最大似然估计法(ML):该方法基于最大似然准则,通过迭代或者优化方法,求解出信号的波达方向(DOA)。
该方法具有较高的估计精度和鲁棒性,但计算复杂度较高。
2. 最小二乘法(LS):该方法是一种线性估计方法,通过最小化估计结果与真实值之间的误差平方和,求解出信号的波达方向。
该方法计算复杂度较低,但在低信噪比条件下估计性能较差。
3. 特征值法(Eigenvalue):该方法利用阵列信号的相关矩阵的特征值和特征向量,来求解信号的波达方向。
常见的特征值法包括MUSIC(Multiple Signal Classification)算法和ESPRIT(Estimation of Signal Parameters via Rotational Invariance Techniques)算法等。
这些算法可以在较低信噪比条件下进行高分辨率的波达方向估计,但计算复杂度较高。
4. 统计方法:该方法利用信号的统计特性,通过建立信号模型和假设检验等手段,来估计信号的波达方向。
常见的统计方法
包括最大后验概率估计、贝叶斯估计等。
这些方法可以在复杂环境下进行稳健的波达方向估计,但计算复杂度较高。
以上是一些常见的阵列信号DOA算法,每种算法都有其优点和局限性,在实际应用中需要根据具体需求选择合适的算法。