USS指令说明
- 格式:doc
- 大小:29.00 KB
- 文档页数:3
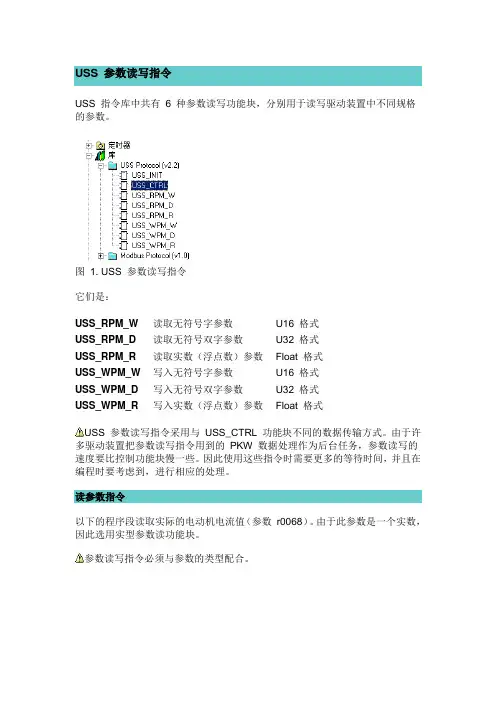
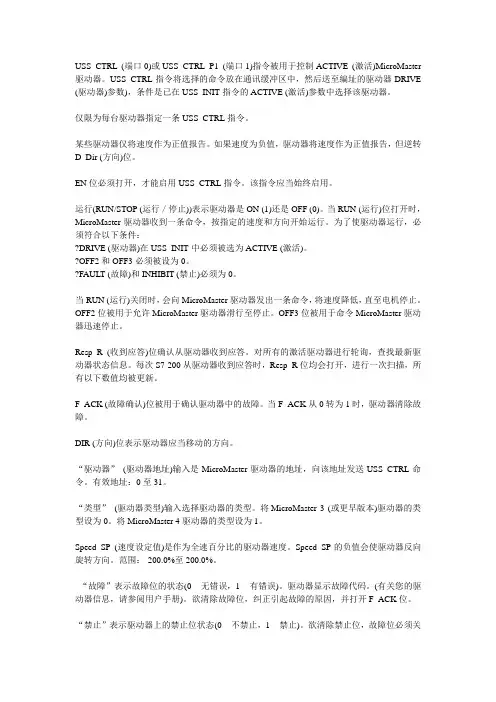
USS 参数读写指令USS 指令库中共有6 种参数读写功能块,分别用于读写驱动装置中不同规格的参数。
图1. USS 参数读写指令它们是:USS_RPM_W 读取无符号字参数U16 格式USS_RPM_D 读取无符号双字参数U32 格式USS_RPM_R 读取实数(浮点数)参数Float 格式USS_WPM_W 写入无符号字参数U16 格式USS_WPM_D 写入无符号双字参数U32 格式USS_WPM_R 写入实数(浮点数)参数Float 格式USS 参数读写指令采用与USS_CTRL 功能块不同的数据传输方式。
由于许多驱动装置把参数读写指令用到的PKW 数据处理作为后台任务,参数读写的速度要比控制功能块慢一些。
因此使用这些指令时需要更多的等待时间,并且在编程时要考虑到,进行相应的处理。
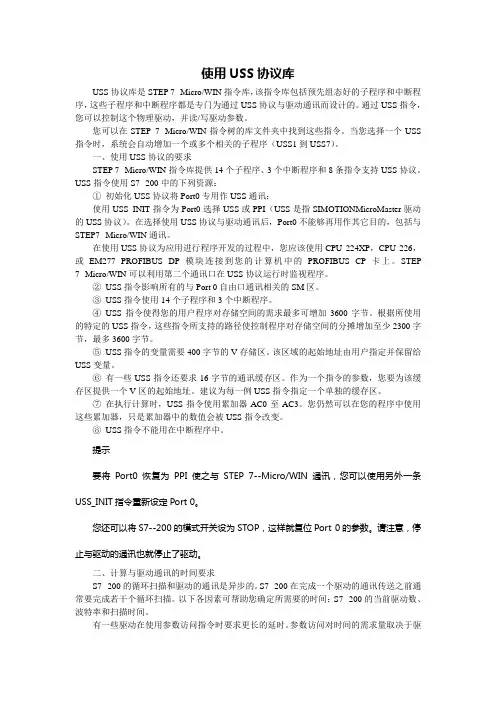
读参数指令以下的程序段读取实际的电动机电流值(参数r0068)。
由于此参数是一个实数,因此选用实型参数读功能块。
参数读写指令必须与参数的类型配合。
图2. 调用USS_RPM_R 指令读取MM 440 的输出电流图中:a. EN:要使能读写指令此输入端必须为1b. XMT_REQ:发送请求。
必须使用一个沿检测触点以触发读操作,它前面的触发条件必须与EN 端输入一致c. Drive:要读写参数的驱动装置在USS 网络上的地址d. Param:参数号(仅数字)。
此处也可以是变量e. Index:参数下标。
有些参数由多个带下标的参数组成一个参数组,下标用来指出具体的某个参数。
对于没有下标的参数,可设置为0f. DB_Ptr:读写指令需要一个16 字节的数据缓冲区,用间接寻址形式给出一个起始地址。
此数据缓冲区与“库存储区”不同,是每个指令(功能块)各自独立需要的。
此数据缓冲区也不能与其他数据区重叠,各指令之间的数据缓冲区也不能冲突g. Done:读写功能完成标志位,读写完成后置1h. Error:出错代码。
0 = 无错误i. Value:读出的数据值。
USS 参数读写指令USS 指令库中共有6 种参数读写功能块,分别用于读写驱动装置中不同规格的参数。
图1. USS 参数读写指令它们是:USS_RPM_W 读取无符号字参数U16 格式USS_RPM_D 读取无符号双字参数U32 格式USS_RPM_R 读取实数(浮点数)参数Float 格式USS_WPM_W 写入无符号字参数U16 格式USS_WPM_D 写入无符号双字参数U32 格式USS_WPM_R 写入实数(浮点数)参数Float 格式USS 参数读写指令采用与USS_CTRL 功能块不同的数据传输方式。
由于许多驱动装置把参数读写指令用到的PKW 数据处理作为后台任务,参数读写的速度要比控制功能块慢一些。
因此使用这些指令时需要更多的等待时间,并且在编程时要考虑到,进行相应的处理。
读参数指令以下的程序段读取实际的电动机电流值(参数r0068)。
由于此参数是一个实数,因此选用实型参数读功能块。
参数读写指令必须与参数的类型配合。
图2. 调用USS_RPM_R 指令读取MM 440 的输出电流图中:a. EN:要使能读写指令此输入端必须为1b. XMT_REQ:发送请求。
必须使用一个沿检测触点以触发读操作,它前面的触发条件必须与EN 端输入一致c. Drive:要读写参数的驱动装置在USS 网络上的地址d. Param:参数号(仅数字)。
此处也可以是变量e. Index:参数下标。
有些参数由多个带下标的参数组成一个参数组,下标用来指出具体的某个参数。
对于没有下标的参数,可设置为0f. DB_Ptr:读写指令需要一个16 字节的数据缓冲区,用间接寻址形式给出一个起始地址。
此数据缓冲区与“库存储区”不同,是每个指令(功能块)各自独立需要的。
此数据缓冲区也不能与其他数据区重叠,各指令之间的数据缓冲区也不能冲突g. Done:读写功能完成标志位,读写完成后置1h. Error:出错代码。
0 = 无错误i. Value:读出的数据值。
USS通讯使用说明
1.简介
RS-485是一种标准的串行总线,用于建立用于通信的多端设备之间的定义规则的通信链路。
该标准中定义的通信协议具有可靠性、很好的灵活性和非常低的成本。
该标准是由一个普通的RS-485串行端口实现的,符合RS-485标准的任何设备可以连接到这个端口上。
2.RS-485传输协议
RS-485传输协议是一种多路、多用户的标准串行协议,可以同时实现多路通信。
它采用多线多用户的总线结构,每台设备都可以接入总线,并在总线上收发数据,但同时只有一台设备可以发送,其他设备处于等待状态。
这种多路、多用户的通信方式保证了多用户的通信不会受到任何干扰。
RS-485传输协议采用收发均衡的方式,这意味着只要有设备处于发送状态,其他设备就可以收到它发送的数据。
采用这种方式,可以有效的防止数据在传输过程中受到干扰,从而提高了数据的可靠性。
3.RS-485通讯方式
RS-485通讯方式的核心是总线通信模式。
这种通信方式的特点是可以有多个设备参与通信。
RS-485通信协议允许多路数据传输,只要两个设备之间满足时间滞后的要求,就可以进行同步传输。
页眉内容门子USS通信一、V20变频器参数设置。
1.P0010=30(恢复出厂设置);2.P0970=21(所有参数恢复至出厂设置状态)3.P0003=3 (用户级别:专家)4.P0700=2(命令源:端子)P0700=5(命令源:USS协议)5.P1000=5 (频率设定:USS协议)6.P2023=l (RS485 协议选择:USS 协议)7.P2010=6(波特率:9600)8.P2011=0-31 (协议地址)二、SMART200PLCUSS 指令说明。
S-INIT (初始化)指令。
a.EN:初始化USS-INITb.Mode:模式选择。
“设置为USS通信协议并进行相关初始化。
=0恢复为PPI协议并禁用USS通信cBaud: USS通信波特率。
=1200=2400=4800=9600=19200=38400=57600=115200d.Port:=OCPU 集成的RS485 通信端口。
=1CMO1信号板e.Active:此参数决定网络上的哪些USS从站在通信中有效。
f.Done:初始化完成标志g.Error:初始化错误代码S-CTRL (驱动装置控制)指令。
a.EN:使用SM0.0使能USS-CTRL指令b.Run:启动/停止控制。
=0停止=1运行c.0FF2:停车信号。
此信号为"1”时,电机自由停车。
d.0FF3:停车信号。
此信号为“1”时,将快速停车。
e.F-ACK:故障确认。
f.DIR:电机运转方向=0正转=1反转g.Drive:驱动装置在USS网络上的站号。
页眉内容h.Type:向USS-CTRL功能块指示驱动装置类型。
=0MM3系列,或更早产精心整理品。
=1MM4 系列,SINAMICSG110, SINAMICSV20l.SpeedSP:速度设定值。
0-50HZ 对应0.0-100.0J. Resp-R:从站应答确认信号。
K. Error:错误代码。
L.Status:驱动装置的状态字。
USS_CTRL (端口0)或USS_CTRL_P1 (端口1)指令被用于控制ACTIVE (激活)MicroMaster 驱动器。
USS_CTRL指令将选择的命令放在通讯缓冲区中,然后送至编址的驱动器DRIVE (驱动器)参数),条件是已在USS_INIT指令的ACTIVE (激活)参数中选择该驱动器。
仅限为每台驱动器指定一条USS_CTRL指令。
某些驱动器仅将速度作为正值报告。
如果速度为负值,驱动器将速度作为正值报告,但逆转D_Dir (方向)位。
EN位必须打开,才能启用USS_CTRL指令。
该指令应当始终启用。
运行(RUN/STOP (运行/停止))表示驱动器是ON (1)还是OFF (0)。
当RUN (运行)位打开时,MicroMaster驱动器收到一条命令,按指定的速度和方向开始运行。
为了使驱动器运行,必须符合以下条件:?DRIVE (驱动器)在USS_INIT中必须被选为ACTIVE (激活)。
?OFF2和OFF3必须被设为0。
?FAULT (故障)和INHIBIT (禁止)必须为0。
当RUN (运行)关闭时,会向MicroMaster驱动器发出一条命令,将速度降低,直至电机停止。
OFF2位被用于允许MicroMaster驱动器滑行至停止。
OFF3位被用于命令MicroMaster驱动器迅速停止。
Resp_R (收到应答)位确认从驱动器收到应答。
对所有的激活驱动器进行轮询,查找最新驱动器状态信息。
每次S7-200从驱动器收到应答时,Resp_R位均会打开,进行一次扫描,所有以下数值均被更新。
F_ACK (故障确认)位被用于确认驱动器中的故障。
当F_ACK从0转为1时,驱动器清除故障。
DIR (方向)位表示驱动器应当移动的方向。
“驱动器”(驱动器地址)输入是MicroMaster驱动器的地址,向该地址发送USS_CTRL命令。
有效地址:0至31。
“类型”(驱动器类型)输入选择驱动器的类型。
使用USS协议库USS协议库是STEP 7--Micro/WIN指令库,该指令库包括预先组态好的子程序和中断程序,这些子程序和中断程序都是专门为通过USS协议与驱动通讯而设计的。
通过USS指令,您可以控制这个物理驱动,并读/写驱动参数。
您可以在STEP 7--Micro/WIN指令树的库文件夹中找到这些指令。
当您选择一个USS 指令时,系统会自动增加一个或多个相关的子程序(USS1到USS7)。
一、使用USS协议的要求STEP 7--Micro/WIN指令库提供14个子程序、3个中断程序和8条指令支持USS协议。
USS指令使用S7--200中的下列资源:①初始化USS协议将Port0专用作USS通讯:使用USS_INIT指令为Port0选择USS或PPI(USS是指SIMOTIONMicroMaster驱动的USS协议)。
在选择使用USS协议与驱动通讯后,Port0不能够再用作其它目的,包括与STEP7--Micro/WIN通讯。
在使用USS协议为应用进行程序开发的过程中,您应该使用CPU 224XP,CPU 226,或EM277 PROFIBUS--DP模块连接到您的计算机中的PROFIBUS CP卡上。
STEP 7--Micro/WIN可以利用第二个通讯口在USS协议运行时监视程序。
②USS指令影响所有的与Port 0自由口通讯相关的SM区。
③USS指令使用14个子程序和3个中断程序。
④USS指令使得您的用户程序对存储空间的需求最多可增加3600字节。
根据所使用的特定的USS指令,这些指令所支持的路径使控制程序对存储空间的分摊增加至少2300字节,最多3600字节。
⑤USS指令的变量需要400字节的V存储区。
该区域的起始地址由用户指定并保留给USS变量。
⑥有一些USS指令还要求16字节的通讯缓存区。
作为一个指令的参数,您要为该缓存区提供一个V区的起始地址。
建议为每一例USS指令指定一个单独的缓存区。
要在S7-200 SMART程序中使用USS协议指令,请按以下步骤操作:
1.在程序中插入USS_INIT指令,并仅执行USS_INIT指令一个扫描周期。
可以使用USS_INIT指令初始化或更改USS协议通信参数。
插入口USS_INIT指令时,会在程序中自动添加若干隐藏的子例程和中断例程。
2.只能在程序中为每台激活变频器放置一条USS_CTRL指令。
可以根据需要增加任意数量的USS_RPM_X和USS_WPM_X指令,但某一时间只能有一条指令处于激活状态。
3.在“文件”(FILE)菜单功能区的“库”(Libranries)区域中单击“存储器”按钮
存储器,为USS库所需的V存储器分配起始地址。
或者,也可在项目树中右键单击“程序块”节点,并从上下文菜单中选择“库存储器”。
4.组态变频器参数,使之与程序中使用的波特率和地址相匹配。
5.用通信电缆连接S7-200 SMART CPU模块( 6ES7 214-2BD23-0XB8)与变频器。
确保与变频器连接的所有控制设备(例如S7-200 SMART CPU〕均用短粗电缆连接到变频器使用的接地点或星点。
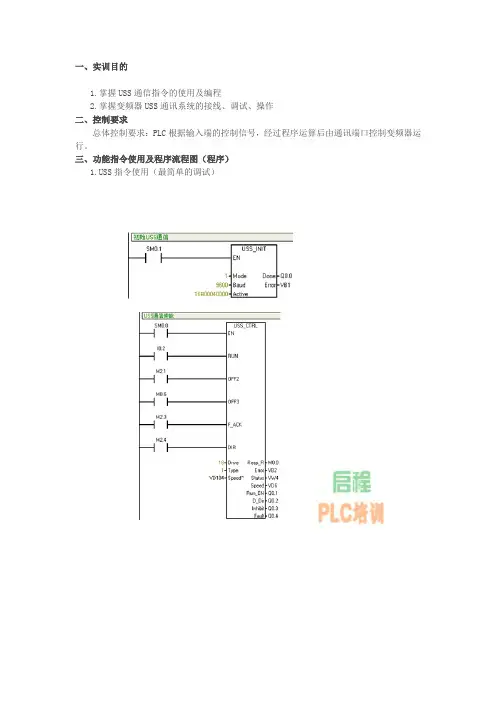
一、实训目的1.掌握USS通信指令的使用及编程2.掌握变频器USS通讯系统的接线、调试、操作二、控制要求总体控制要求:PLC根据输入端的控制信号,经过程序运算后由通讯端口控制变频器运行。
三、功能指令使用及程序流程图(程序)S指令使用(最简单的调试)1.1、USS_INIT指令:被用于启用和初始化或禁止MicroMaster驱动器通讯。
在使用任何其他USS协议指令之前,必须先执行USS_INIT指令,才能继续执行下一条指令。
1.1.1、EN:输入打开时,在每次扫描时执行该指令。
仅限为通讯状态的每次改动执行一次USS_INIT指令。
使用边缘检测指令,以脉冲方式打开EN输入。
欲改动初始化参数,执行一条新USS_INIT指令。
1.1.2、MODE(模式):输入值1时将端口0分配给USS协议,并启用该协议;输入值0时将端口0分配给PPI,并禁止USS协议。
1.1.3、BAUD(波特率):将波特率设为1200、2400、4800、9600、19200、38400、57600或115200。
1.1.4、ACTIVE(激活)表示激活的驱动器。
站点号具体计算如下:其中D0~D31代表有32台变频器,四台为一组,共分成八组。
如果要激活某台变频器就使该位为1,现在激活18号变频器,即为表二所示。
,构成16进位数得出Active即为0004000若同时有32台变频器须激活,则Altive为16#FFFFFFFF,此外还有一条指令用到站点号,USS-CTRL中的Drive驱动站号不同于USS-INIT中的Active激活号,Active激活号指定哪几台变频器须要激活,而Drive驱动站号是指先激活后的哪台电机驱动,因此程序中可以有多个USS-CTRC指令。
1.2、USS_CTRL指令:被用于已在USS_INIT指令中ACTIVE(激活)的驱动器。
且仅限为一台驱动器。
1.2.1、EN(使能):打开此端口,才能启用USS_CTRL指令。
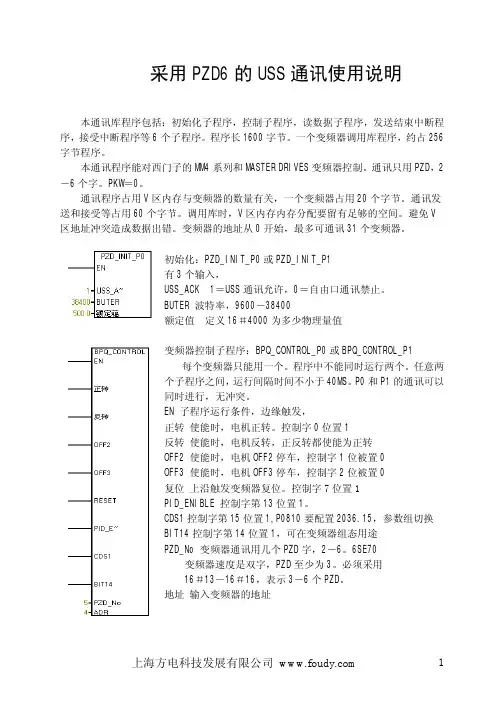
采用PZD6的USS通讯使用说明本通讯库程序包括:初始化子程序,控制子程序,读数据子程序,发送结束中断程序,接受中断程序等6个子程序。
程序长1600字节。
一个变频器调用库程序,约占256字节程序。
本通讯程序能对西门子的MM4系列和MASTER DRIVES变频器控制。
通讯只用PZD,2-6个字。
PKW=0。
通讯程序占用V区内存与变频器的数量有关,一个变频器占用20个字节。
通讯发送和接受等占用60个字节。
调用库时,V区内存内存分配要留有足够的空间。
避免V 区地址冲突造成数据出错。
变频器的地址从0开始,最多可通讯31个变频器。
初始化:PZD_INIT_P0或PZD_INIT_P1有3个输入,USS_ACK 1=USS通讯允许,0=自由口通讯禁止。
BUTER 波特率,9600-38400额定值定义16#4000为多少物理量值变频器控制子程序:BPQ_CONTROL_P0或BPQ_CONTROL_P1每个变频器只能用一个。
程序中不能同时运行两个。
任意两个子程序之间,运行间隔时间不小于40MS。
P0和P1的通讯可以同时进行,无冲突。
EN 子程序运行条件,边缘触发,正转使能时,电机正转。
控制字0位置1反转使能时,电机反转,正反转都使能为正转OFF2 使能时,电机OFF2停车,控制字1位被置0OFF3 使能时,电机OFF3停车,控制字2位被置0复位上沿触发变频器复位。
控制字7位置1PID_ENIBLE 控制字第13位置1。
CDS1控制字第15位置1,P0810要配置2036.15,参数组切换BIT14控制字第14位置1,可在变频器组态用途PZD_No 变频器通讯用几个PZD字,2-6。
6SE70变频器速度是双字,PZD至少为3。
必须采用16#13-16#16,表示3-6个PZD。
地址输入变频器的地址控制子程序:PZD_CONTROL_P0或PZD_CONTROL_P1每个变频器只能用一个。
程序中不能同时运行两个。
竭诚为您提供优质文档/双击可除uss协议内容篇一:u(uss协议内容)ss指令说明uss-int指令详解en:初始化程序uss_init只需在程序中执行一个周期就能改变通信口的功能,以及进行其他一些必要的初始设置,因此可以使用sm0.1或者沿触发的接点调用uss_init指令;mode:模式选择,执行uss_init时,mode的状态决定是否在port0上使用uss通信功能;=1设置port0为uss通信协议并进行相关初始化0恢复port0为ppi从站模式baud:uss通信波特率。
此参数要和变频器的参数设置一致;=24002400bit/s48004800bit/s96009600bit/s1920xx9200bit/s3840038400bit/s5760057600bit/s11520xx15200bit/sactive:此参数决定网络上的哪些uss从站在通信中有效。
详见下面的说明;done:初始化完成标志error:初始化错误代码孤陋寡闻,我从来没看过有dRV-ctRl这条指令uss-ctRl指令详解en:使用sm0.0使能uss_ctRl指令Run:驱动装置的启动/停止控制=0停止1运行此停车是按照驱动装置中设置的斜坡减速指电机停止oFF2:停车信号2。
此信号为“1"时,驱动装置将封锁主回路输出,电机自由停车oFF3:停车信号3。
此信号为”1"时,驱动装置将快速停车F_ack:故障确认。
当驱动装置发生故障后,将通过状态字向uss主站报告;如果造成故障的原因排除,可以使用此输入端清除驱动装置的报警状态,即复位。
注意这是针对驱动装置的操作。
diR:电机运转方向控制。
其“0/1”状态决定运行方向drive:驱动装置在uss网络上的站号。
从站必须先在初始化时激活才能进行控制type:向uss_ctRl功能块指示驱动装置类型=0mm3系列,或更早的产品1mm4系列,sinamicsg110speed_sp:速度设定值。
USS通讯使用说明1 适用范围:S7-200系列PLC 与6RA70 / 6RA24 串联通讯。
2 通讯协议:1:USS协议;2:发送/接收各4个字;3:通讯速度:19200波特;4:站点数量:4个3 接口接线:1#站2#站3#站4#站S7-200 6RA70 6RA70 6RA70 6RA70 S7-214RS485 RS485 RS485 RS485 PPI4 6RA70设置:P790 = 2 //USS通讯P791 = 4 //发送/接收字数P793 = 7 //通讯速度:19200波特;P794。
1 发送的第一个字2 发送的第二个字3 发送的第三个字4 发送的第四个字P796 = 站址(1—4 )r812。
1 接收的第一个字K60012 接收的第二个字K60023 接收的第三个字K60034 接收的第四个字K60045 S7-200设置:5.1 程序文件名:S7-200-USS5.2 程序结构:MAIN:主程序:Network1---4通讯调用Network5-----系统逻辑SBR0:USS通讯初始化SBR1:USS通讯主程序INT0:USS通讯发送中断程序INT1:USS通讯接收中断程序DB1:VB80---VB599 USS通讯数据缓冲区5.3 其中被用户使用的地址://1#从站发送缓冲区VB202 1 //发1#从站地址VW209 16#9C7E //发1#从站PZD1(16#9C7E= 6RA70控制字)VW211 16#2000 //发1#从站PZD2(16#2000=6RA70转速设定为50%)VW213 0 //发1#从站PZD3VW215 0 //发1#从站PZD4//1#从站接受缓冲区VW233 //接1#从站PZD1VW235 //接1#从站PZD2VW237 //接1#从站PZD3VW239 //接1#从站PZD4VB240 //接1#从站校验位VB240《》0则效验错误//2#从站发送缓冲区VB302 2 //发2#从站地址VW309 16#9C7E //发2#从站PZD1VW311 16#2000 //发2#从站PZD2VW313 0 //发2#从站PZD3VW315 0 //发2#从站PZD4//2#从站接受缓冲区VW333 //接2#从站PZD1VW335 //接2#从站PZD2VW337 //接2#从站PZD3VW339 //接2#从站PZD4VB340 //接2#从站校验位VB340《》0则效验错误//3#从站发送缓冲区VB402 3 //发3#从站地址VW409 16#9C7E //发3#从站PZD1VW411 16#2000 //发3#从站PZD2VW413 0 //发3#从站PZD3VW415 0 //发3#从站PZD4//3#从站接受缓冲区VW433 //接3#从站PZD1VW435 //接3#从站PZD2VW437 //接3#从站PZD3VW439 //接3#从站PZD4VB440 //接3#从站校验位VB440《》0则效验错误//4#从站发送缓冲区VB502 4 //发4#从站地址VW509 16#9C7E //发4#从站PZD1VW511 16#2000 //发4#从站PZD2VW513 0 //发4#从站PZD3VW515 0 //发4#从站PZD4//4#从站接受缓冲区VW533 //接4#从站PZD1VW535 //接4#从站PZD2VW537 //接4#从站PZD3VW539 //接4#从站PZD4VB540 //接4#从站校验位VB340《》0则效验错误注意:1 如果站址较少,多余站可被改变站址,重复使用。
USS通讯使用说明1 适用范围:S7-200系列PLC 与6RA70 / 6RA24 串联通讯。
2 通讯协议:1:USS协议;2:发送/接收各4个字;3:通讯速度:19200波特;4:站点数量:4个3 接口接线:1#站2#站3#站4#站S7-200 6RA70 6RA70 6RA70 6RA70 S7-214RS485 RS485 RS485 RS485 PPI4 6RA70设置:P790 = 2 //USS通讯P791 = 4 //发送/接收字数P793 = 7 //通讯速度:19200波特;P794。
1 发送的第一个字2 发送的第二个字3 发送的第三个字4 发送的第四个字P796 = 站址(1—4 )r812。
1 接收的第一个字K60012 接收的第二个字K60023 接收的第三个字K60034 接收的第四个字K60045 S7-200设置:5.1 程序文件名:S7-200-USS5.2 程序结构:MAIN:主程序:Network1---4通讯调用Network5-----系统逻辑SBR0:USS通讯初始化SBR1:USS通讯主程序INT0:USS通讯发送中断程序INT1:USS通讯接收中断程序DB1:VB80---VB599 USS通讯数据缓冲区5.3 其中被用户使用的地址://1#从站发送缓冲区VB202 1 //发1#从站地址VW209 16#9C7E //发1#从站PZD1(16#9C7E= 6RA70控制字)VW211 16#2000 //发1#从站PZD2(16#2000=6RA70转速设定为50%)VW213 0 //发1#从站PZD3VW215 0 //发1#从站PZD4//1#从站接受缓冲区VW233 //接1#从站PZD1VW235 //接1#从站PZD2VW237 //接1#从站PZD3VW239 //接1#从站PZD4VB240 //接1#从站校验位VB240《》0则效验错误//2#从站发送缓冲区VB302 2 //发2#从站地址VW309 16#9C7E //发2#从站PZD1VW311 16#2000 //发2#从站PZD2VW313 0 //发2#从站PZD3VW315 0 //发2#从站PZD4//2#从站接受缓冲区VW333 //接2#从站PZD1VW335 //接2#从站PZD2VW337 //接2#从站PZD3VW339 //接2#从站PZD4VB340 //接2#从站校验位VB340《》0则效验错误//3#从站发送缓冲区VB402 3 //发3#从站地址VW409 16#9C7E //发3#从站PZD1VW411 16#2000 //发3#从站PZD2VW413 0 //发3#从站PZD3VW415 0 //发3#从站PZD4//3#从站接受缓冲区VW433 //接3#从站PZD1VW435 //接3#从站PZD2VW437 //接3#从站PZD3VW439 //接3#从站PZD4VB440 //接3#从站校验位VB440《》0则效验错误//4#从站发送缓冲区VB502 4 //发4#从站地址VW509 16#9C7E //发4#从站PZD1VW511 16#2000 //发4#从站PZD2VW513 0 //发4#从站PZD3VW515 0 //发4#从站PZD4//4#从站接受缓冲区VW533 //接4#从站PZD1VW535 //接4#从站PZD2VW537 //接4#从站PZD3VW539 //接4#从站PZD4VB540 //接4#从站校验位VB340《》0则效验错误注意:1 如果站址较少,多余站可被改变站址,重复使用。
uss码编码规则
USS码是一种通信协议,主要用于数字通信和电子设备之间的数据传输。
USS码编码规则是其通信协议的具体规定,包括以下几个方面:
1. 开始位(Start Bit):每个数据传输的开始位都是一个低电平(0),用于告诉接收设备数据传输的开始。
2. 数据位(Data Bits):USS码的数据位可以是5位、6位、7位或8位。
不同位数的数据位可以传输不同的数据长度。
3. 奇偶校验位(Parity Bit):USS码可以设置奇偶校验位来检测数据传输中的错误。
奇偶校验位可以是奇校验或偶校验,并且可以选择是否使用校验位。
4. 停止位(Stop Bit):每个数据传输的停止位都是一个高电平(1),用于告诉接收设备数据传输的结束。
5. 波特率(Baud Rate):波特率指的是USS码数据传输的速率,即每秒钟传输的比特数。
常见的波特率有9600、19200、38400等。
这些规则共同确定了数据在传输过程中的格式和检验机制,确保了数据的准确传输和可靠性。
USS协议库指令的用法关于200与G110变频器通信问题,想请教各位高工们,请各位详细指教,现有1台200plc和14台G110变频器,之间采用USS通信,14台变频器的控制可以多段速频率实时控制,控制频率由屏上设置,并且14台的实际运行频率需要反应给PLC后,再屏上显示,14台电机运行方式有时同时控制,也可能错开控制,而且每个电机多需要2段速·和正反转控制,先想请教高工们:USS库的用法。
1.先定义需要控制的变频器数量,波特率,同时在变频器设置相对应的通信属性,S控制块的用法,本人也用1台PLC和1台G110通信过,能运行,频率也可设置,也就是单台通信能到达预期的效果,现在迷惑之处是,14台,是需要14个USS控制块调用吗?USS控制块好似是USS_CTRL,如果是,每个USS控制块占用397个字节,那么14个所需要的字节量=14*397个字节吗?并且14个USS控制块要像MODBUS库那样写轮回控制(靠前者完成位触发后者所需要的库吗),具体怎样轮回控制要怎样写?前辈们:请详细写出程序例子,本人在此谢过!!!如果14USS控制块不需要轮回触发,就直接分别同时调用它,这样可以同时分别控制电机运行吗?这样端口会通信不了,会错吗?答:1、USS协议库指令,归根结底是一个子程序集,它包含了若干个子程序。
这些子程序的运行会占用变量区。
由于子程序运行时,会占用这些变量区,所以用户不能用。
否则运行出错。
我的学生就犯过这种错误,导致uss指令运行时始终有错误代码1。
(这种错误,编译不会提示有错误的。
除非你没有指定库指令的存储器区,程序编译会出错,当然也就别提程序运行了)2、理解上面这一点,回想C语言的运行,显然,无论你驱动多少个变频器。
所占用的都是那397个字节。
因为他们调用的都是同一个子程序。
3、进一步讲,所谓的USS指令库,其本质就是PLC的自由口通信,只不过西门子写了一个通用程序集,简化了用户的工作。
USS-INT指令详解
EN:初始化程序USS_INIT 只需在程序中执行一个周期就能改变通信口的功能,以及进行其他一些必要的初始设置,因此可以使用SM0.1 或者沿触发的接点调用USS_INIT 指令;
Mode:模式选择,执行USS_INIT 时,Mode 的状态决定是否在Port 0 上使用USS 通信功能;
= 1 设置Port 0 为USS 通信协议并进行相关初始化
0 恢复Port 0 为PPI 从站模式
Baud:USS 通信波特率。
此参数要和变频器的参数设置一致;
= 2400 2400 bit/s
4800 4800 bit/s
9600 9600 bit/s
19200 19200 bit/s
38400 38400 bit/s
57600 57600 bit/s
115200 115200 bit/s
Active:此参数决定网络上的哪些USS 从站在通信中有效。
详见下面的说明;Done:初始化完成标志
Error:初始化错误代码
孤陋寡闻,我从来没看过有DRV-CTRL这条指令
USS-CTRL指令详解
EN:使用SM0.0 使能USS_CTRL 指令
RUN:驱动装置的启动/停止控制
= 0 停止
1 运行
此停车是按照驱动装置中设置的斜坡减速指电机停止
OFF2:停车信号2。
此信号为“1"时,驱动装置将封锁主回路输出,电机自由停车
OFF3:停车信号3。
此信号为”1"时,驱动装置将快速停车
F_ACK:故障确认。
当驱动装置发生故障后,将通过状态字向USS 主站报告;如果造成故障的原因排除,可以使用此输入端清除驱动装置的报警状态,即复位。
注意这是针对驱动装置的操作。
DIR:电机运转方向控制。
其“0/1”状态决定运行方向
Drive:驱动装置在USS 网络上的站号。
从站必须先在初始化时激活才能进行控制
Type:向USS_CTRL 功能块指示驱动装置类型
= 0 MM 3 系列,或更早的产品
1 MM 4 系列,SINAMICS G 110
Speed_SP:速度设定值。
速度设定值必须是一个实数,给出的数值是变频器的频率范围百分比还是绝对的频率值取决于变频器中的参数设置(如MM 440 的P2009)
Resp_R:从站应答确认信号。
主站从USS 从站收到有效的数据后,此位将为“1"一个程序扫描周期,表明以下的所有数据都是最新的
Error:错误代码。
0 = 无出错。
其他错误代码请参考
Status:驱动装置的状态字。
此状态字直接来自驱动装置的状态字,表示了当时的实际运行状态
详细的状态字信息意义请参考相应的驱动装置手册。
Speed:驱动装置返回的实际运转速度值,实数。
是否频率值跟随设定值的规格化设定
Run_EN:运行模式反馈,表示驱动装置是运行(为1)还是停止(为0)
D_Dir:指示驱动装置的运转方向,反馈信号
Inhibit:驱动装置禁止状态指示(0 - 未禁止,1 - 禁止状态)。
禁止状态下驱
动装置无法运行。
要清除禁止状态,故障位必须复位,并且RUN, OFF2 和OFF3 都为0
Fault:故障指示位(0 - 无故障,1 - 有故障)。
表示驱动装置处于故障状态,驱动装置上会显示故障代码(如果有显示装置)。
要复位故障报警状态,必须先消除引起故障的原因,然后用F_ACK 或者驱动装置的端子、或操作面板复位故障状态。
此USS_CTRL 功能块使用了PZD 数据读写机制,传输速度比较快。
但由于它还是串行通信,而且还可能有多个从站需要轮询,因此无法做到”实时“响应。
要实现高要求的快速通信,应该使用PROFIBUS-DP等网络,同时更换主站为更高级的控制器。
也由于同样的原因,USS_CTRL 输入的控制信号需要一个合理的作用时间,以等待指令执行完成,过快速的变化可能会导致没有响应。
USS_CTRL 已经能完成基本的驱动装置控制,如果需要有更多的参数控制选项,可以选用USS 指令库中的参数读写指令实现。
提问者评价
xiexie,那您知道S7-300和变频器怎么进行通讯吗?我试了好多次,都没通上。
郁闷那!!!!。