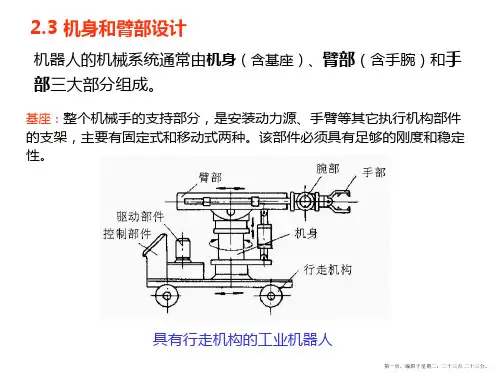
水平多关节机器人总体及腰臂部设计
- 格式:doc
- 大小:146.00 KB
- 文档页数:9
PUMA560正文:1、简介PUMA560是由美国西屋公司研发的一款多关节工业。
它是一款具有6个自由度的,可执行各种复杂的操作任务。
本文档将详细介绍PUMA560的技术规格、操作方法、维护保养以及安全注意事项等内容。
2、技术规格2.1 结构PUMA560由基座、腰部、臂部、前臂以及手部组成。
每个部件都由多个关节连接,使具备了灵活的运动能力。
2.2 运动范围PUMA560的每个关节都可以在规定的范围内自由运动。
具体的运动范围如下:- 基座旋转范围.360度- 腰部旋转范围:±180度- 臂部上下摆动范围:±135度- 前臂旋转范围:±135度- 手部旋转范围:±360度2.3 负载能力PUMA560的最大负载能力为45千克。
在工作过程中,请确保所携带物体的重量不超过的负载能力,以免损坏。
3、操作方法3.1 编程PUMA560可通过编程来指导其执行各种任务。
编程可以使用专门的编程软件,并通过连接电脑与进行通信。
编程时,应确保编写的指令准确无误,并进行适当的调试。
3.2 远程控制PUMA560还支持远程控制操作。
可以通过使用遥控器或者连接计算机进行远程控制。
远程操作时,需要注意控制信号的稳定性,避免干扰导致操作失误。
4、维护保养4.1 定期检查为确保PUMA560的正常运行,应定期对其进行检查。
包括检查传动系统、关节的润滑情况、电源和电缆的连接以及控制系统的功能等。
4.2 清洁和润滑应定期对进行清洁,特别是清洁的关节部位。
同时,在润滑方面,需要定期给关节添加润滑油,以确保关节的顺畅运动。
5、安全注意事项5.1 电源和电缆在使用PUMA560时,应确保电源的可靠性和稳定性。
同时,注意检查电缆的连接情况,保证连接牢固,避免意外断电。
5.2 操作规范在操作时,应按照操作规范进行操作,避免不必要的误操作。
同时,避免人员靠近的工作区域,以免造成伤害。
5.3 紧急停止当发生紧急情况时,应立即执行紧急停止的操作,以确保操作人员的安全。
第二章总体设计2.1工业机器人的主要技术参数设计机器人,首先要确定机器人的主要技术参数,然后由机器人的技术参数来选择机器人的机械结构,坐标形式和传动装置。
1.自由度自由度是描述物体运动所需的独立坐标数。
机器人的自由度表示机器人动作灵活的尺度,一般以轴的直线移动,摆动或旋转动作的数目来表示,手部的动作不包括在内。
机器人的自由度越高,就越能接近忍受的动作机能,通用性就越好;但是,自由度越多结构越复杂。
2.工作空间机器人的工作空间是指机器人手臂或手部安装点所能达到的所有工作区域。
3.工作速度工作速度是指机器人在工作载荷条件下,语速运动过程中,机械接口中心或工具中心点在单位时间内移动的距离或转动的角度。
4.工作载荷机器人在规定的性能范围内,机械接口所能承受的再打负载量。
用质量,力矩,惯性矩来表示。
5.控制方式机器人用于控制轴的方式,是伺服还是非伺服,伺服控制方式是连续轨迹还是点到点的运动。
6.驱动方式驱动方式是指关节执行器的动力源形式。
7.精度,重复精度和分辨率精度,重复精度和分辨率是用来定义机器人手部的定位能力。
精度是一个位置量相对于其参照量系的绝对度量,指机器人首部实际到达位置与所需到达的理想位置之间的差距。
机器人的精度决定于机械精度和电气精度。
重复精度指在相同的运动位置命令下,机器人连续若干次运动轨迹之间的误差度量。
分辨率是指机器人每根轴所能实现的最小移动距离或最小转动角度。
2.2 机械部分2.2.1机械结构的组成由于应用场合的不同,工业机器人结构形式有多种多样,各组成部分的驱动方式、传动原理和机械结构也由各种不同的类型。
通常根据机器人各部分的功能,其机械部分主要由下列各部分组成。
1.手部工业机器人为了进行作业,在手腕上配置了操作机构,有时也为手抓或末端操作器。
2.手腕联接手部和手臂的部分,主要作用是改变手部的空间位置,满足极其所有的作业空间,并将各种载荷传递到机座。
3.臂部联接机身和手腕的部分,主要作用是改变手部的空间位置,满足工业机器人的作业空间,并将各种载荷传递到机座。
![工业机器人4[1].3_臂部手腕设计](https://uimg.taocdn.com/1040630169eae009581bec96.webp)
![关节型工业机械手的结构设计毕业设计说明书[管理资料]](https://uimg.taocdn.com/330f9ed0bcd126fff6050b77.webp)
毕业论文题目关节型工业机械手的结构设计学院机械工程学院专业机械工程及自动化班级机自0917班学生学号20090421170指导教师二〇一三年六月三日摘要关于该关节型工业机械手的具体研究方法。
本次设计工作首先对实体安川机器人进行了细致的研究,了解了其内部的具体结构,安川机器人的结构可分为六个轴系,然后根据六个轴系对其内部结构进行分解,以便了解各个零件之间的配合,这样就对安川机器人有了大体的了解。
下面就进行尺寸的测量,尺寸的测量只需要测量一下大体的外观尺寸,而内部尺寸可根据零件的配合进行合理的设计。
然后,进行计算(包括电机功率的计算,轴的设计,齿轮的参数计算),接着可依据相关资料,选取恰当的电机。
最后,可根据实体与之前所掌握的知识对机械手的结构进行设计分析。
关键词:伺服电机、机械手抓、移动旋转。
ABSTRACTHere is about the research method of the industrial manipulator joints. The design work on the real first AnChuan robot has carried on the detailed research, understand the internal structure of concrete, AnChuan robot structure can be divided into six axis, and then according to the six axis of its internal structure decomposition, in order to understand the cooperation between the various parts of the, thus for AnChuan robot have roughly understanding. Below is the size of the measurement, the size of the measurement only need to measure the general appearance of the size, and the internal dimension can be reasonable according to the parts of the design. Then, computing (including motor power calculation, the design of the shaft, the gear parameter calculation), then can according to relevant data, select the appropriate machine. Finally, according to the entity and prior knowledge on the structure of the manipulator design analysis.Keywords:servo motor rotate, manipulator grabbing and moving.目录摘要 (I)ABSTRACT (II)1 前言 (1)机械手国内外发展现状 (1)多关节型工业机械手概述 (2)机械手组成与分类 (3) (3) (3)2机械手的设计方案 (4) (5)机械手设计方案 (5)方案特点 (6)电机的选型 (7)初步估算机械手的质量 (7) (8)计算电机功率 (10)锥齿轮设计 (10)齿轮精度、材料 (10)按齿面接触疲劳强度设计 (10)按齿根弯曲强度设计 (12)锥齿轮参数计算 (12)同步带轮的设计 (13)同步齿形带传动计算 (13)带轮几何尺寸的计算 (14)减速器的设计 (16)减速器减速比的计算 (16)减速器输出轴径的计算 (16)4 机械手各结构设计 (17)手爪结构的设计 (17)手爪的设计要求 (17)手爪的分类 (18)手部结构形式的确定 (18)手腕结构的设计 (18)手腕的设计要求 (18)手腕结构形式的确定 (19)手臂结构的设计 (19)手臂的设计要求 (19)手臂结构 (19)小臂结构形式的确定 (20)小臂后箱体的结构设计 (20)连接杆件的设计 (21)5 关键轴的校核 (21)腕部输入轴的结构 (21)轴的校核 (22)6 结论 (24)参考文献 (25)致谢 (26)1前言机械手国内外发展现状1962年,美国机械铸造公司试制成一台数控试教机械手。

1前言1.1机器人的概念机器人是一个在三维空间中具有较多自由度,并能实现较多拟人动作和功能的机器,而工业机器人则是在工业生产上应用的机器人。
美国机器人工业协会提出的工业机器人定义为:“机器人是一种可重复编程和多功能的,用来搬运材料、零件、工具的操作机”。
英国和日本机器人协会也采用了类似的定义。
我国的国家标准GB/T12643-90将工业机器人定义为:“机器人是一种能自动定位控制、可重复编程的、多功能的、多自由度的操作机。
能搬运材料、零件或操持工具,用以完成各种作业”。
而将操作机定义为:“具有和人手臂相似的动作功能,可在空间抓放物体或进行其它操作的机械装置”。
机器人系统一般由操作机、驱动单元、控制装置和为使机器人进行作业而要求的外部设备组成。
1.1.1操作机操作机是机器人完成作业的实体,它具有和人手臂相似的动作功能。
通常由下列部分组成:a.末端执行器又称手部,是机器人直接执行工作的装置,并可设置夹持器、工具、传感器等,是工业机器人直接与工作对象接触以完成作业的机构。
b. 手腕是支承和调整末端执行器姿态的部件,主要用来确定和改变末端执行器的方位和扩大手臂的动作范围,一般有2~3个回转自由度以调整末端执行器的姿态。
有些专用机器人可以没有手腕而直接将末端执行器安装在手臂的端部。
c. 手臂它由机器人的动力关节和连接杆件等构成,是用于支承和调整手腕和末端执行器位置的部件。
手臂有时包括肘关节和肩关节,即手臂与手臂间。
手臂与机座间用关节连接,因而扩大了末端执行器姿态的变化范围和运动范围。
d. 机座有时称为立柱,是工业机器人机构中相对固定并承受相应的力的基础部件。
可分固定式和移动式两类。
1.1.2驱动单元它是由驱动器、检测单元等组成的部件,是用来为操作机各部件提供动力和运动的装置。
1.1.3控制装置它是由人对机器人的启动、停机及示教进行操作的一种装置,它指挥机器人按规定的要求动作。
1.1.4人工智能系统它由两部分组成,一部分是感觉系统,另一部分为决策-规划智能系统。
机电学院毕业设计指导书课题名称关节型机器人结构设计及仿真分析教学系、部、室机械设计系专业机械设计制造及其自动化指导教师一、毕业设计题目题目名称:关节型机器人结构设计及仿真分析机器人技术是近40多年来迅速发展起来的一门综合性学科,它综合了机械学、电子学、计算机科学、自动控制工程、人工智能、仿生学等多个学科的最新研究成果,代表了机电一体化的最高成就,是当今世界科学技术发展最活跃的领域之一。
机器人的研究、制造和应用,正受到许多国家的广泛重视,是一个国家科技水平和经济实力的象征。
它能够替代人类不知疲倦地完成枯燥繁重的劳动,降低工人的劳动强度,提高劳动生产率。
它的环境适应能力强,能够在水下、太空、真空、辐射以及剧毒等任何危险环境中工作,使人类的生命安全和健康得到保障。
随着研究的深入,人们不断发现机器人技术的潜力,对它的应用已经逐步渗透到了人们生产和生活的各个领域中。
目前工业生产中应用最广泛的机器人是工业机器人,亦称作工业机械手。
各种不同功能的机械手操作系统其机械、电气和控制结构一般也各不相同,但大多数完整的机械手系统都有4个主要部分:1.机械本体机构2.传感系统3.控制系统4.驱动源。
机械本体机构通常是由手臂、手腕和末端执行器组成。
它们主要是由一系列旋转关节或移动关节相连接的多个机械连杆的集合体,从而形成开式运动链的结构。
一端装在固定的基座上,另一端在手腕上安装手爪、各种夹持机构或专用工具来完成各种工作。
机械手在执行一项任务时,由它的机械结构实现其运动机能,完成规定作业,因此机械结构的布局、类型、传动方法和驱动方式将直接影响机械手的总体性能。
传感系统是将有关机械部件的各种工作状态信息传递给机器人的控制系统,控制系统通过这些信息确定机械部件各部分的正确运行轨迹、速度、位置和外部环境,使机械部件的各部分按预定程序在规定的时间开始和结束动作。
驱动源是使各种机械部件产生运动的装置,主要包括气动、液压和电动三种形式。
技术创新 29◊杭州师范大学钱江学院施嘉濠竺佳杰 孙滨鑫罗汉杰多自由度机械臂的设计以及运动仿真机器人具有高效率性以及高精准性, 物流搬运机器人成为近来的研究热点,机械臂作为搬运动作的直接执行机构是研究 的重点。
本文设计搭建了一款多关节型机械臂,使用舵机进行驱动,通过Arduino进行舵机控制。
通过D-H 法建立运动学方 程后运用MATLAB 的robotics Toolbox 工具包对机械臂进行运动学仿真,并后续研究 打下基础。
人类向智能现代化社会的飞跃式发展 得益于机器人技术的出现与成熟,机器人 技术的发展与成熟不断影响着我们的生产生活方式。
作为工业机器人的一个重要分 支,搬运机器人的发展研究对社会发展具有很大的积极意义。
国际机器人联合会 (International Federation of Robotics , IFR )根据不同的应用场合,将机器人分为三大 类叫工业机器人,主要应用于工业生产之 中;特种机器人,只在及其特殊的环境中 有所发挥;在家庭生活中为人类服务的家庭服务型机器人。
搬运机器人作为工业机器人这一大类中的一个重要分支,具有十 分宽广的研究前景。
既然是工业机器人的分支,那么机械臂的研究则成为了整个工业机器人研究的 重点。
机器人运动学分析是实现机器人运 动控制与轨迹规划的基础,其中正逆运动学分析是最基本的问题鷺而D-H 参数法X是常用的分析方法,运用MATLAB 软件仿 真可以模拟机器人的运动情况和动态特 性,验证建立的运动学模型,帮助研究人员了解机器人的工作空间的形态和极限,更加直观地显式机器人的运动情况,得到 从数据曲线和数据本身难以分析的很多重 要信息曲□1机械臂的搭建图1物流码垛机器人实物图用于搬运物体的机械臂种类繁多,不 同的结构应用与相适应的工作环境可以降低调式成本,缩点研究周期。
其中,多关节型是目前应用最为广泛的机械臂,所有关节都能进行转动,这种结构设计使得多关节型机械臂拥有其它类型机械臂无法比 拟的灵活度优势。
工业机器人臂部设计基本要求工业机器人臂部设计基本要求工业机器人是现代制造业中不可或缺的重要设备,而机器人臂部作为其最核心的部件之一,其设计质量和性能直接影响着机器人的工作效率和稳定性。
工业机器人臂部的设计基本要求显得尤为重要。
在工业机器人的设计中,臂部是机器人最为重要的执行部件之一,同时也是最复杂的部分之一。
臂部不仅要承受机器人的工作负荷,还要具有足够的灵活性和自适应性,以适应不同工作场景的需求。
工业机器人臂部的设计需要满足一系列基本要求。
1. 结构强度工业机器人的臂部需要具备足够的结构强度,以承受工作时的负荷和冲击。
在设计中需要考虑材料的选择、结构的布局和连接方式等因素,以确保臂部在工作时不会发生变形或破坏,从而保证机器人的工作稳定性和安全性。
2. 运动精度工业机器人的臂部需要具备较高的运动精度,以保证机器人在工作时能够精准地执行各项任务。
这要求设计中需要考虑驱动装置的选型、传动结构的设计和控制系统的稳定性等方面,以确保臂部的运动轨迹和位置控制精度。
3. 自由度和灵活性工业机器人的臂部需要具备足够的自由度和灵活性,以适应不同工作场景和任务的需要。
设计中需要考虑关节数量和布局、关节传动机构的设计和臂部结构的柔性等因素,以确保臂部能够灵活自如地进行各项动作和工作。
4. 负载能力工业机器人的臂部需要具备足够的负载能力,以适应不同工作场景和任务的需要。
设计中需要考虑臂部材料的承载能力、结构布局的合理性和负载分布的均衡性等因素,以确保臂部能够承载和操作各种工作负载。
5. 节能环保工业机器人臂部的设计也需要考虑节能环保的要求,以满足现代制造业对于能源消耗和环境保护的要求。
设计中需要采用节能材料、优化结构设计和改进传动方式等措施,以降低机器人的能耗和减少环境污染。
总结回顾工业机器人臂部设计的基本要求包括结构强度、运动精度、自由度和灵活性、负载能力以及节能环保等方面。
而在实际的设计过程中,还需要充分考虑工作场景和任务的特点,灵活运用各种工程技术手段,以确保臂部设计能够满足不同工业生产的需求。
目录1 前言 (1)1.1 课题来源与分析 (1)1.2 国内外发展及研究现状 (1)1.3 本课题要解决的主要问题及设计总体思路 (3)2 关节型机器人的总体设计 (4)2.1 确定基本技术参数 (4)2.1.1 机械结构类型的选择 (4)2.1.2 额定负载 (4)2.1.3 操作机的驱动系统设计 (5)2.1.4 确定关节型机器人手臂的配置形式 (5)2.2 关节型机器人本体方案设计 (6)3 关节型机器人腰部及大臂部设计 (8)3.1 电动机的选择 ........................................................................... 错误!未定义书签。
3.2 计算传动装置的总传动比和分配各级传动比 ....................... 错误!未定义书签。
3.3 基座及腰部轴的设计计算 ....................................................... 错误!未定义书签。
3.3.1 计算各轴转速、转矩和输入功率 ....................................... 错误!未定义书签。
3.3.2轴的结构设计 ..................................................................... 错误!未定义书签。
3.4 肘关节轴的设计计算 ............................................................... 错误!未定义书签。
3.5 齿轮设计计算 ........................................................................... 错误!未定义书签。
3.5.1基座处齿轮设计计算 ............................................................ 错误!未定义书签。
3.5.2肘关节处齿轮设计计算 ........................................................ 错误!未定义书签。
3.6轴承的选择和计算 .................................................................... 错误!未定义书签。
3.7 壳体设计 ................................................................................... 错误!未定义书签。
3.7.1 箱体的主要功能 ................................................................... 错误!未定义书签。
3.7.2 箱体设计的问题和要求 ....................................................... 错误!未定义书签。
3.7.3 壳体结构的设计 ................................................................... 错误!未定义书签。
3.7.4 箱体结构参数的选择 ........................................................... 错误!未定义书签。
4 关节型机器人的位姿分析..................................................... 错误!未定义书签。
4.1 机器人的位姿与运动分析 ....................................................... 错误!未定义书签。
4.2关节型机器人的广义连杆变换齐次矩阵 ............................... 错误!未定义书签。
5结论...................................................................................... 错误!未定义书签。
参考文献.................................................................................. 错误!未定义书签。
致谢 ................................................................................... 错误!未定义书签。
附录.................................................................................. 错误!未定义书签。
1 前言1.1 课题来源与分析本课题来源于生产实际。
要求设计的机器人具有5个自由度:①大臂旋转;②小臂旋转;③腕部的升降;④腕部的旋转;⑤手部的夹紧与松开。
其中要详细地设计机器人腰部和大臂的结构。
整体机器人要实现腕部最大负荷5kg,最大速度2m/s,最小工作空间范围550mm 。
机器人是近30年发展起来的一种典型的、机电一体化的、独立的自动化生产工具。
在制造工业中,应用工业机器人技术是提高生产过程自动化,改善劳动条件,提高产品质量和生产效率的有效手段之一,也是新技术革命的一个重要内容。
自古以来,人们所设想的机器人一般是一种在外形和功能上均能模拟人类智能的机器。
特别是在20世纪20年代前后,捷克和美国的一些科幻作家创作了一批关于未来机器人与人类共处中可能发生的故事之类的文学作品,更使机器人在人们的思想中成为一种无所不能的“超人”。
在现实生活中,一些民间工匠根据这些文学描绘,也制造出一些仿人或仿生的机器人。
然而在当时的科技条件下,要使机器人具有某种特殊的“智能”而成为“超人”,显然是不可能的。
美国的戴沃尔设想了一种可控制的机械手,他首先突破了对机器人的传统观点,提出机器人并不一定必须像人,但是必须能做一些人的工作。
1954年,他依据这一想法设计制作了世界上第一台机器人实验装置,发表了《适用于重复作业的通用性工业机器人》一文,并获得了美国专利。
戴沃尔将遥控操纵器的关节型连杆机构与数控机床的伺服轴联结在一起,预定的机械手动作一经编程输入后,机构就可以离开人的辅助而独立运行。
这种机器人也可以接受示教而完成各种简单任务。
示教过程中操作者用手带动机械手依次通过工作任务的各个位置,这些位置序列记录在数字存储器中,任务的执行过程中,机器人的各个关节在伺服驱动下再现出那些位置序列。
因此,这种机器人的主要技术就是“可编程”以及“示教再现”。
机器人技术的发展,它应该说是一个科学技术发展共同的一个综合性的结果,也同时,为社会经济发展产生了一个重大影响的一门科学技术,各国加强了经济的投入,就加强了本国的经济的发展。
可以预见,在21世纪各种先进的机器人系统将会进入人类生活的各个领域,成为人类良好的助手和亲密的伙伴。
为了能够更好的节约人力、物力、财力。
为此本课题设计了水平多关节机器人。
1.2 国内外发展及研究现状国内外机器人领域发展近几年有如下几个趋势∶a.工业机器人性能不断提高(高速度、高精度、高可靠性、便于操作和维修),而单机价格不断下降。
b.机械结构向模块化、可重构化发展。
例如关节模块中的伺服电机、减速机、检测系统三位一体化;由关节模块、连杆模块用重组方式构造机器人整机;国外已有模块化装配机器人产品问市。
水平多关节机器人总体及腰臂部设计c.工业机器人控制系统向基于PC机的开放型控制器方向发展,便于标准化、网络化;器件集成度提高,控制柜日见小巧,且采用模块化结构;大大提高了系统的可靠性、易操作性和可维护性。
d.机器人中的传感器作用日益重要,除采用传统的位置、速度、加速度等传感器外,装配、焊接机器人还应用了视觉、力觉等传感器,而遥控机器人则采用视觉、声觉、力觉、触觉等多传感器的融合技术来进行环境建模及决策控制;多传感器融合配置技术在产品化系统中已有成熟应用。
e.虚拟现实技术在机器人中的作用已从仿真、预演发展到用于过程控制,如使遥控机器人操作者产生置身于远端作业环境中的感觉来操纵机器人。
f.当代遥控机器人系统的发展特点不是追求全自治系统,而是治理于操作者于机器人的人机交互控制,即遥控加局部自主系统构成完整的监控遥控操作系统,使智能机器人走出实验室进入实用化阶段。
美国发射到火星上的“索杰纳”机器人就是这种系统成功应用的最著名实例。
g.机器人化机械开始兴起。
从94年美国开发出“虚拟轴机床”以来,这种新型装置已成为国际研究的热点之一,纷纷探索开拓其实际应用的领域。
国际机器人研究在经过了80年代的低潮之后,呈现出复苏和继续发展的形势;我国的机器人研究在国家“七五”、“八五”及863计划的推动下也取得了很大的发展。
在70年代的机器人浪潮相比,现在的机器人研究有两个特点:一是对机器人智能的定位有了更加符合实际的标准,也就是不要求机器人具有像人类一样的高智商,而只是要求机器人在某种程度上具有自主处理问题的能力。
我国的工业机器人从80年代“七五”科技攻关开始起步,在国家的支持下,通过“七五”“八五”科技攻关,目前已基本掌握了机器人操作机的设计制造技术、控制技术硬件和软件设计技术、运动学和轨迹规划技术,生产了部分机器人关键元器件,开发出喷漆、弧焊、点焊、装配、搬运等机器人;其中有130多台套喷漆机器人在二十余家企业的近30条自动喷漆生产线(站)上获得规模应用,弧焊机器人已应用在汽车制造厂的焊装线上。
但总的来看,我国的工业机器人技术及其工程应用的水平和国外比还有一定的距离,如:可靠性低于国外产品;机器人应用工程起步晚,应用领域窄,生产线系统技术与国外比有差距;在应用规模上,我国已安装的国产工业机器人约200台,约占全球已安装台数的万分之四。
以上原因主要是没有形成机器人产业,当前我国的机器人生产都是应用户的要求,“一客户,一次重新设计”,品种规格多、批量小、零部件通用化程度低、供货周期长、成本也不低,而且质量、可靠性不稳定。
因此迫切需要解决产业化前期的关键技术,对产品进行全面规划,搞好系列化、通用化、模块化设计,积极推进产业化进程。
我国的智能机器人和特种机器人在“863”计划的支持下,也取得了不少成果,其中最为突出的是水下遥控机器人,6000m水下无缆机器人的成果居世界领先水平,还开发出直接遥控机器人、双臂协调控制机器人、爬壁机器人、管道机器人等机种;在机器人视觉、力觉、声觉、触觉等基础技术的开发应用上开展了不少工作,有了一定的发展基础。