第一章 假肢技术
- 格式:ppt
- 大小:14.44 MB
- 文档页数:199
假肢装配的流程及注意事项展开全文序曲:假肢装配的流程及注意事项,好多截肢患者都非常关心这个问题,顾虑重重,不知道去哪装配,针对这一类问题,我单独开一个帖子总结一下,供大家参考。
第一章: 假肢的最佳装配期这个跟截肢原因有关,所谓截肢就是将四肢的某一部分截断、切除。
截肢原因有1.外伤及其后遗症。
2.末梢血液循环障碍。
3.恶性肿瘤4.炎症5.神经性疾病6.先天性畸形及双腿明显不等长我们讲的最佳装配期,外伤的患者是术后拆线两个周~两个月时间为最佳装配期。
有骨折的患者要在术后三个半月复查,看骨折腿是否能承重,如果可以,考虑第四个月去假肢公司装配假肢。
末梢血液循环障碍的患者,做腔要做松,不能穿太紧的假肢。
恶性肿瘤的患者,要在打完第三个疗程化疗的时候装配假肢,提高活动量增加人体免疫力。
骨髓炎的患者保腿不必太执着,能保则保,保不住腿就要保住命。
没有特别要求。
先天性畸形的患者要征求骨科医生的意见,提前问好假肢公司技术人员问理想的截肢部位。
第二章:截肢部位也叫截肢层面,我们根据截肢层面不同划分了不同假肢种类。
下肢截肢层面分为:半骨盆截肢——半骨盆假肢髋离断截肢——髋离断假肢膝上截肢(大腿截肢)——大腿假肢膝离断截肢——膝离断假肢膝下截肢(小腿截肢)——小腿假肢踝离断截肢——踝离断假肢部分足截肢——半足假肢上肢截肢层面:半肩离断截肢——半肩离断假肢肩离断截肢——肩离断假肢上臂截肢——上臂假肢肘离断截肢——肘离断假肢前臂截肢——前臂假肢腕离断截肢——腕离断假肢半掌截肢——美容拉链手手指截肢——美容手指第三章:假肢的选择标准这个问题很大,不同截肢部位的患者都有相应的选择标准,我选主要的部位讲吧,要是语音就好了。
手机打字需要时间。
第一节:小腿假肢的选择标准其实用通俗易懂的语言讲小腿假肢的选择标准是:要选择全长力臂,碳纤维骨架,脚心脚壳分离式的脚板。
这样才能保证假肢和好脚完全等长,走路的步幅均等,迈步没有时间差。
额状面走路时膀子和骨盆不会一高一低,看不出来瘸来。


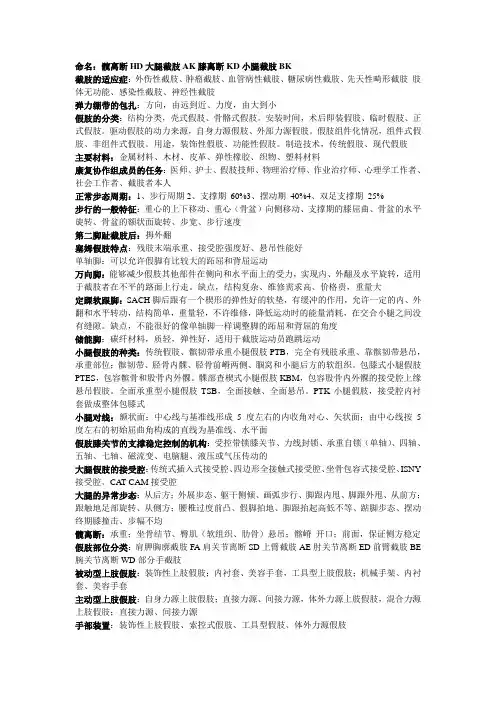
命名:髋离断HD大腿截肢AK膝离断KD小腿截肢BK截肢的适应症:外伤性截肢、肿瘤截肢、血管病性截肢、糖尿病性截肢、先天性畸形截肢肢体无功能、感染性截肢、神经性截肢弹力绷带的包扎:方向,由远到近、力度,由大到小假肢的分类:结构分类,壳式假肢、骨骼式假肢。
安装时间,术后即装假肢、临时假肢、正式假肢。
驱动假肢的动力来源,自身力源假肢、外部力源假肢。
假肢组件化情况,组件式假肢、非组件式假肢。
用途,装饰性假肢、功能性假肢。
制造技术,传统假肢、现代假肢主要材料:金属材料、木材、皮革、弹性橡胶、织物、塑料材料康复协作组成员的任务:医师、护士、假肢技师、物理治疗师、作业治疗师、心理学工作者、社会工作者、截肢者本人正常步态周期:1、步行周期2、支撑期60%3、摆动期40%4、双足支撑期25%步行的一般特征:重心的上下移动、重心(骨盆)向侧移动、支撑期的膝屈曲、骨盆的水平旋转、骨盆的额状面旋转、步宽、步行速度第二脚趾截肢后:拇外翻塞姆假肢特点:残肢末端承重、接受腔强度好、悬吊性能好单轴脚:可以允许假脚有比较大的跖屈和背屈运动万向脚:能够减少假肢其他部件在侧向和水平面上的受力,实现内、外翻及水平旋转,适用于截肢者在不平的路面上行走。
缺点,结构复杂、维修需求高、价格贵,重量大定踝软跟脚:SACH脚后跟有一个楔形的弹性好的软垫,有缓冲的作用,允许一定的内、外翻和水平转动,结构简单,重量轻,不许维修,降低运动时的能量消耗,在交合小腿之间没有缝隙。
缺点,不能很好的像单轴脚一样调整脚的跖屈和背屈的角度储能脚:碳纤材料,质轻,弹性好,适用于截肢运动员跑跳运动小腿假肢的种类:传统假肢、髌韧带承重小腿假肢PTB,完全有残肢承重、靠髌韧带悬吊,承重部位;髌韧带、胫骨内髁、胫骨前嵴两侧、腘窝和小腿后方的软组织。
包膝式小腿假肢PTES,包容髌骨和股骨内外髁。
髁部查楔式小腿假肢KBM,包容股骨内外髁的接受腔上缘悬吊假肢。
全面承重型小腿假肢TSB,全面接触、全面悬吊。
第一节下肢功能\解剖一、人体运动关节的表述1、人体的基本体位与基本面(1)人体的基本体位:指人体自然垂直站立于地面的状态。
(2)人体的基本面:指人体自然站立时沿三维方向切割人体的三个期互垂直的平面。
●矢状面:沿身体前后径所作的与地面垂直的切面,此面将人体分为左右两部分。
●额状面:沿身体左右径所作的与地面垂直的切面,此面将人体分为前后两部分。
●水平面:横切直立身体与地面平行的切面,此面将人体分为上下两部分。
(3)人体的基本轴:是指分别垂直于三个基本面的三条期互垂直的直线。
●额状轴(左右方向):垂直通过矢状面的轴。
●矢状轴(前后方向):垂直通过额状面的轴。
●垂直轴(上下方向):垂直通过水平面的轴。
2、人体关节运动术语人体的关节运动分为屈伸、水平屈伸、外展内收、内旋外旋和环旋等五种。
(1)屈伸:在矢状面内绕额状轴运动。
(2)水平屈伸:上臂在肩关节处外展到90°时,向前运动叫水平屈,向后运动叫水平伸(大腿在髋关节外亦如此)。
(3)外展内收(4)内旋外旋(5)环转:3、下肢关节运动的特有术语:(1)髋关节:屈髋外展、划弧(2)膝关节:内翻、外翻、反屈(3)踝关节:背屈、跖屈、内收、外展、内翻、外翻二、下肢骨下肢骨由盆带骨和游离下肢骨组成。
盆带骨只有一骨即髋骨,游离下肢骨由大腿的股骨、髌骨、小腿的胫骨和腓骨以及足的跗骨、跖骨、趾骨组成。
与下肢假肢本关的骨标志:髂嵴、髂前上棘、坐骨结节、耻骨、大转子、股骨上髁、髌骨、膝关节间隙、胫骨内髁、胫骨粗隆、胫骨前嵴、腓骨小头、内踝、外踝。
1、骨盆与盆带骨骨盆由左右两块髋骨、骶骨和尾骨组成。
髋骨由三块独立的骨,即髂骨、耻骨和坐骨,借软骨结合而成,以后逐渐骨化而成为一块髋骨。
其外侧有一明显的深窝叫髋臼,这是上述三块骨体结合的地方。
2、大腿骨大腿骨即股骨,是人体最粗大的长骨,其上端是股骨头,头下方细小部分是股骨颈,体的上外方有一粗大的突起,叫大转子。
在大转子的后下内方还有一小突起叫小转子。
生物医学工程中的智能假肢技术近年来,随着科技的飞速发展,生物医学工程领域得到了越来越多的关注。
而智能假肢技术则是在生物医学工程领域中一个备受关注的研究方向。
智能假肢技术,指的是利用先进的电子技术、机械控制技术、神经科学等学科的交叉融合,研制出新型的智能化假肢,来帮助失去肢体的病人重新获得正常的身体功能。
这项技术的研究不仅涉及到机械控制和电子技术,同时也涵盖了生物信息学、医药学、心理学等多个领域,可以说在科技、医学和人文方面都有着广阔的应用前景。
智能假肢技术的主要理念是仿生学,即将机器人和生物学相结合,开发出仿真人类肢体的假肢,来达到神经、生物、机械三个方面的融合。
智能假肢的研究可以分为两个方向。
一是针对人工肢体最基本的机械性能进行的研究,包括关节灵活性、阻尼性、力反馈等;另一方面是对假肢控制的研究,包括肢体姿势交互、肢体位移的精确控制,以及假肢与人体传递信号效率的改进等。
在智能假肢技术的研究中,关键技术主要包括感应技术、控制技术以及动力学技术。
感应技术是指假肢设备通过与人体神经交流来实现功能控制与交互。
控制技术则是指对假肢进行设备控制的技术,包括设备软件与硬件方面的开发。
动力学技术是指对机械方面进行控制的技术,包括机械的流体力学、力学控制等方向。
这些技术的发展将会从不同的角度和层次上为智能假肢的研究提供支持,促进该领域的发展。
智能假肢技术还面临着一些挑战和困难。
首先,由于神经科学的限制,智能假肢的传感器和制动器的信号传递速度有时会出现滞后现象,可能会影响肢体的控制和感知。
其次,智能假肢的能源问题也需要解决。
理想情况下,假肢需要依靠电池等供能设备,但是,目前的电池容量和使用时间都相对较短,在使用中可能会受到限制。
智能假肢的发展也需要在资金、技术和组织等方面得到强有力的支持,才能够快速推进研究和应用。
虽然智能假肢技术仍然存在挑战,但是,其应用前景依然十分广阔。
在战争和灾害中受伤的士兵和平民需要带有智能假肢的康复措施,来帮助他们实现肢体功能复原。
假肢的工作原理
假肢是一种用于替代失去的肢体部分的装置,其工作原理基于多种技术和原理,目的是恢复或增强肢体的功能。
以下是常见假肢的工作原理:
1. 机械假肢:机械假肢是最常见和传统的类型,其工作原理基于机械结构和连接件。
机械假肢通常由铝合金、碳纤维材料等制成,可以通过连接到残肢的支撑骨骼或肌肉组织来提供支撑。
通过关节、索具和拉线等机械装置,机械假肢能够模拟关节运动,并使残肢恢复基本的功能,如行走、抓握等。
2. 电子假肢:电子假肢采用电子技术和传感器来增强假肢的功能。
传感器可以通过感知肌肉运动、电信号或其他生理信号,将其转化为控制信号,用于控制假肢的运动。
这些控制信号经过处理后,驱动假肢的电机或液压装置,从而实现与自然肢体更为接近的运动。
电子假肢能够模拟自然肢体的更复杂动作,如精确的手指动作、踝关节控制等。
3. 捕捉式假肢:捕捉式假肢是一种近年来发展起来的高级假肢技术。
它利用神经电信号或肌电信号的读取和解析,在残肢和假肢之间建立直接的神经或肌肉连接。
通过外部电极或植入式神经电极,将肌肉或神经信号读取并转化为假肢相关的运动指令。
然后,这些指令被传输到假肢的激活装置,从而实现假肢的运动。
这种技术可以使假肢与用户的神经和肌肉直接交互,实现更为精准和自然的运动。
总的来说,不同类型的假肢工作原理各异,但它们的目标都是
通过模拟或增强自然肢体的功能,提供身体残障者更好的生活质量和机会。