六年级科学研究杠杆的秘密实验报告
- 格式:doc
- 大小:30.00 KB
- 文档页数:2
一、实验目的1. 通过实验探究杠杆的平衡条件,了解杠杆平衡的基本原理。
2. 掌握实验方法,培养实验操作技能和科学思维。
3. 增强团队协作能力,提高实验报告撰写水平。
二、实验器材1. 杠杆(含支架):一根,长度适中,两端可挂钩码。
2. 钩码盒:一套,包含不同质量的钩码。
3. 弹簧测力计:一个,用于测量力的大小。
4. 细线:若干,用于悬挂钩码。
5. 刻度尺:一把,用于测量力臂长度。
6. 记录本:一本,用于记录实验数据。
三、实验原理杠杆平衡条件:动力×动力臂 = 阻力×阻力臂。
四、实验步骤1. 将杠杆放在支架上,确保其水平并静止。
2. 在杠杆两端分别悬挂钩码,并调整其位置,使杠杆处于平衡状态。
3. 使用弹簧测力计测量两端钩码的重量,记录数据。
4. 使用刻度尺测量两端钩码到支点的距离,即力臂长度,记录数据。
5. 改变一端钩码的质量或位置,观察杠杆是否仍处于平衡状态。
6. 重复步骤3-5,进行多次实验,记录数据。
五、实验数据实验次数 | 动力(N) | 动力臂(m) | 阻力(N) | 阻力臂(m) | 平衡条件------- | -------- | -------- | -------- | -------- | --------1 | 2.0 | 0.5 | 1.0 | 0.5 | 动力×动力臂 = 阻力×阻力臂2 | 3.0 | 0.6 | 1.5 | 0.6 | 动力×动力臂 = 阻力×阻力臂3 | 4.0 | 0.7 | 2.0 | 0.7 | 动力×动力臂 = 阻力×阻力臂4 | 5.0 | 0.8 | 2.5 | 0.8 | 动力×动力臂 = 阻力×阻力臂5 | 6.0 | 0.9 | 3.0 | 0.9 | 动力×动力臂 = 阻力×阻力臂六、实验结果与分析1. 实验结果显示,在多次实验中,杠杆均处于平衡状态,满足动力×动力臂 = 阻力×阻力臂的平衡条件。
![教科版小学科学六年级上册科学实验报告[五篇范例]](https://uimg.taocdn.com/213fdf8364ce0508763231126edb6f1aff00712a.webp)
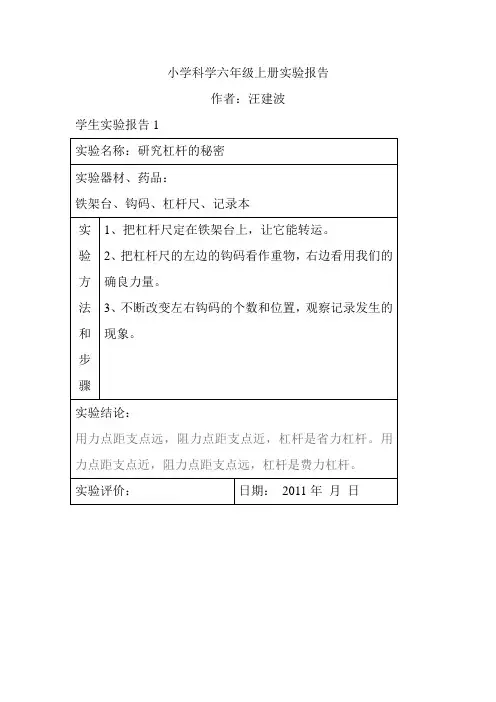
教科版小学科学六年级上册科学实验报告[五篇范例]第一篇:教科版小学科学六年级上册科学实验报告科学实验报告****年**月**日六年级上册班次实验组别实验者实验名称杠杆的科学实验类型分组实验实验目的知道杠杆有三个点,收集并认识杠杆省力和费力,不省力也不费力的规律。
在实验中体会到收集数据的重要意义,并且意识到相互合作的重要性。
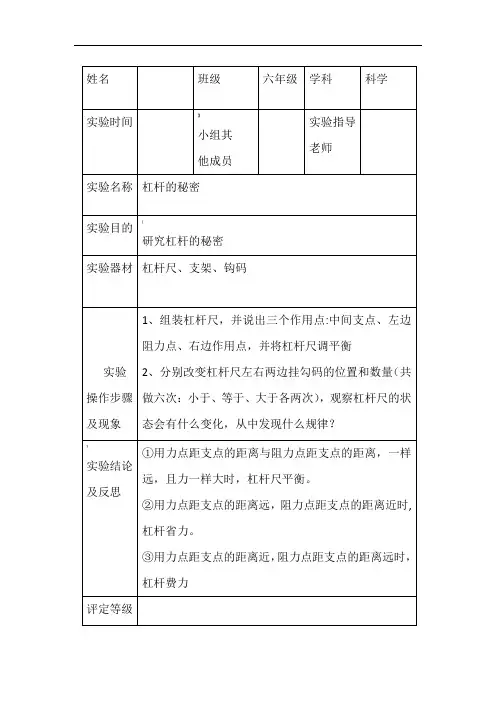
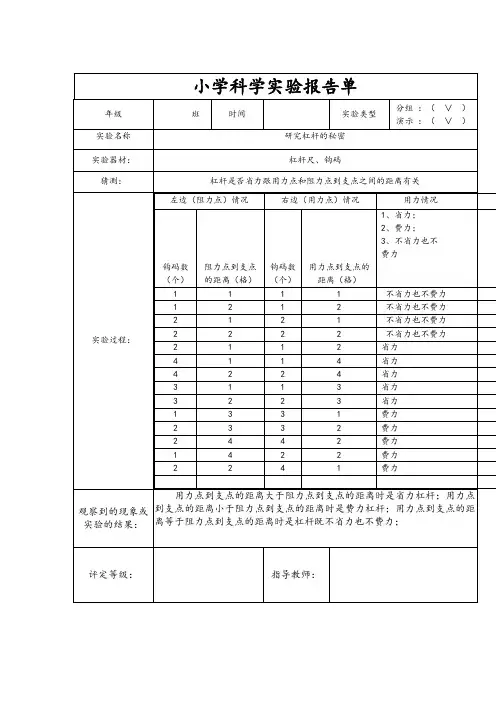
实验器材杠杆尺钩码简简单单实实验验过过程程猜猜测测杠杆是否省力跟用力点和阻力点到支点之间的距离有关。
组装杠杆尺实验装置,调整平衡。
自主确定两端钩码的位置和数量。
在杠杆尺两端相应位置挂钩码,使杠杆尺平衡观察用力点和阻力点与支点的位置关系观察到的现象左边(阻力点)情况右边(用力点)情况用力情况钩码数(个)阻力点到支点的距离(格)钩码数(个)用力点到支点的距离(格)、省力;2、费力;3、不省力也不费力 1 1 1 1 不省力也不费力 1 2 1 2 不省力也不费力 2 1 1 2 省力 4 1 1 4 省力 1 3 3 1 费力 2 3 3 2 费力实实验验结结论论用力点到支点的距离大于阻力点到支点的距离时是省力杠杆;用力点到支点的距离小于阻力点到支点的距离时是费力杠杆;用力点到支点的距离等于阻力点到支点的距离时是杠杆既不省力也不费力。
指导教师评定等级:★优秀☆良好□及格○待改进科学实验报告****年**月**日六年级上册班次实验组别实验者实验名称轮轴的秘密实验类型分组实验实验目的掌握轮轴的构造,明白轮越大越省力。
了解轮轴在生活中的应用,激发研究简单机械的兴趣。
实验器材轮轴、细线、钩码简简单单实实验验过过程程猜猜测测把一定数据的钩码挂在轴上,看成要克服的阻力。
在轮上也挂上钩码,看成是我们用力的大小,通过反复比较轮上钩码和轴上钩码的数量进行分析。
观察到的现象实实验验结结论论指导教师评定等级:★优秀☆良好□及格○待改进科学实验报告****年**月**日六年级上册班次实验组别实验者实验名称动滑轮和定滑轮实验类型分组实验实验目的知道定滑轮固定在一个地方,不能随着物体的移动而移动。
杠杆的科学实验报告单杠杆的科学实验报告单引言:杠杆是一种简单而又重要的物理工具,被广泛应用于各个领域。
本实验旨在通过一系列实验,探究杠杆的原理和应用,并通过数据的收集和分析,验证杠杆的科学原理。
实验一:平衡的杠杆实验目的:通过调整杠杆的两端的物体质量,观察杠杆是否能够保持平衡,并探究杠杆平衡的条件。
实验步骤:1. 准备一个杠杆,将其放置在水平桌面上。
2. 在杠杆的一端悬挂一个质量较大的物体,如一个重物。
3. 在杠杆的另一端逐渐加挂质量较小的物体,直到杠杆保持平衡。
4. 记录下质量较大物体和质量较小物体的质量。
实验结果和分析:根据实验结果,我们可以得出结论:杠杆能够保持平衡的条件是,左右两端所受的力矩相等。
即质量乘以距离的乘积在杠杆的两端相等。
这一原理被称为杠杆平衡原理。
实验二:杠杆的力矩计算实验目的:通过测量不同质量物体在杠杆上的距离和力矩,验证力矩的计算公式。
实验步骤:1. 准备一个杠杆,将其放置在水平桌面上。
2. 在杠杆的一端悬挂一个质量较大的物体,如一个重物。
3. 在杠杆的另一端逐渐加挂质量较小的物体,直到杠杆保持平衡。
4. 测量质量较大物体和质量较小物体之间的距离,并记录下来。
5. 计算每个物体的力矩,即质量乘以距离的乘积。
实验结果和分析:根据实验结果,我们可以发现力矩的计算公式为:力矩 = 质量× 距离。
实验中测得的力矩应该在杠杆的两端相等,验证了力矩的计算公式的正确性。
实验三:杠杆的应用实验目的:通过实验探究杠杆在实际生活中的应用,并了解不同类型杠杆的特点和用途。
实验步骤:1. 准备不同类型的杠杆,如一字杠、二字杠、三字杠等。
2. 分别观察不同类型杠杆的结构和特点。
3. 探究不同类型杠杆在不同场景中的应用,如撬动物体、增加力的作用、平衡物体等。
实验结果和分析:杠杆在实际生活中有着广泛的应用。
一字杠常用于撬动物体,如拧开盖子;二字杠常用于增加力的作用,如使用扳手;三字杠常用于平衡物体,如天平。
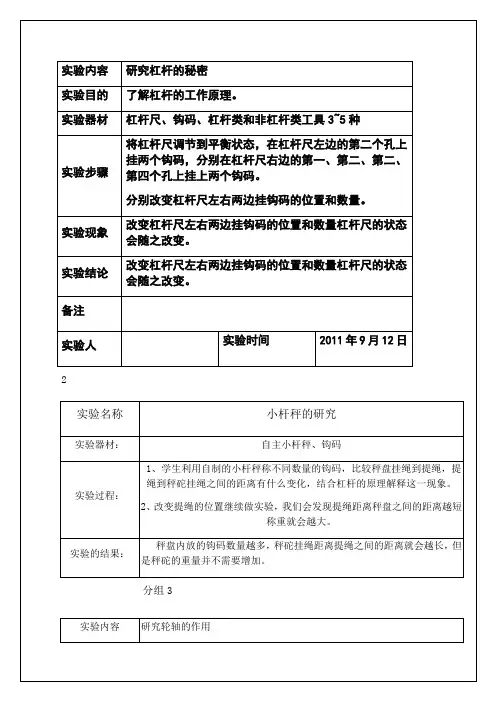
研究杠杆的秘密实验报告单研究杠杆的秘密实验报告单杠杆是物理学中一个重要的概念,它也被广泛应用于金融领域。
在这个实验中,我们将探索杠杆的原理和应用,并进一步研究杠杆的秘密。
1. 实验目的我们的实验目的是通过对杠杆的研究,深入理解其原理和应用。
通过实验,我们希望揭示杠杆背后的秘密,并探索其在物理学和金融学中的重要性。
2. 实验步骤我们首先准备了一个简单的杠杆装置,由一个固定支点和两个不同长度的杠杆臂组成。
我们将在不同的位置施加力,并记录杠杆的平衡状态。
通过改变力的大小和位置,我们可以观察到杠杆的不同反应。
3. 实验结果我们发现,当施加力在支点附近时,较短的臂将产生更大的力矩,使杠杆保持平衡。
当施加力在较长臂上时,需要更大的力才能平衡杠杆。
这表明杠杆的平衡取决于力和力臂的乘积,即力矩。
4. 杠杆原理根据实验结果,我们可以得出结论:杠杆平衡的原理是力矩的平衡。
力矩是由力和力臂的乘积决定的,力臂是从支点到力的作用点的垂直距离。
当杠杆的两边力矩相等时,杠杆保持平衡。
5. 杠杆在物理学中的应用杠杆在物理学中有广泛的应用。
例如,撬棍和剪刀都是杠杆的应用。
杠杆的原理也被应用于机械设计中,例如起重机和平衡机构。
在这些应用中,杠杆的平衡原理被用于增加力量或改变力的方向。
6. 杠杆在金融学中的应用杠杆在金融学中也有重要的应用。
在投资领域,杠杆被用于增加投资回报率。
通过借入资金进行投资,投资者可以利用杠杆效应来增加投资收益。
然而,杠杆也带来了风险,因为投资亏损也会被放大。
7. 杠杆的秘密杠杆的秘密在于它的潜在能力。
它可以增加力量或回报率,但同时也增加了风险。
了解杠杆的原理和应用对于正确使用和管理杠杆至关重要。
在金融领域,过度使用杠杆可能导致债务危机和金融崩溃。
因此,我们必须谨慎地运用杠杆,以实现最佳的效益。
8. 结论通过这个实验,我们深入研究了杠杆的原理和应用。
我们发现杠杆的平衡取决于力矩的平衡,而杠杆在物理学和金融学中都有重要的应用。
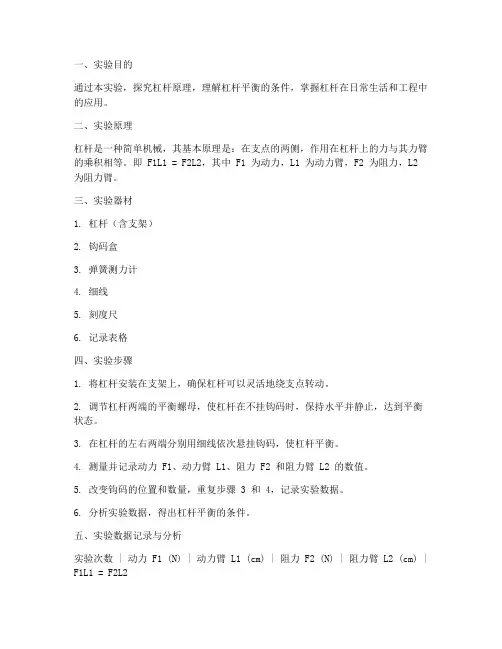
一、实验目的通过本实验,探究杠杆原理,理解杠杆平衡的条件,掌握杠杆在日常生活和工程中的应用。
二、实验原理杠杆是一种简单机械,其基本原理是:在支点的两侧,作用在杠杆上的力与其力臂的乘积相等。
即 F1L1 = F2L2,其中 F1 为动力,L1 为动力臂,F2 为阻力,L2 为阻力臂。
三、实验器材1. 杠杆(含支架)2. 钩码盒3. 弹簧测力计4. 细线5. 刻度尺6. 记录表格四、实验步骤1. 将杠杆安装在支架上,确保杠杆可以灵活地绕支点转动。
2. 调节杠杆两端的平衡螺母,使杠杆在不挂钩码时,保持水平并静止,达到平衡状态。
3. 在杠杆的左右两端分别用细线依次悬挂钩码,使杠杆平衡。
4. 测量并记录动力 F1、动力臂 L1、阻力 F2 和阻力臂 L2 的数值。
5. 改变钩码的位置和数量,重复步骤 3 和 4,记录实验数据。
6. 分析实验数据,得出杠杆平衡的条件。
五、实验数据记录与分析实验次数 | 动力 F1 (N) | 动力臂 L1 (cm) | 阻力 F2 (N) | 阻力臂 L2 (cm) | F1L1 = F2L2--- | --- | --- | --- | --- | ---1 | 2.0 | 10.0 | 1.0 | 20.0 | 20.0 = 20.02 | 1.5 | 15.0 | 1.5 | 10.0 | 22.5 = 15.03 | 1.0 | 30.0 | 2.0 | 5.0 | 30.0 = 10.0根据实验数据,可以得出以下结论:1. 杠杆平衡的条件是动力与动力臂的乘积等于阻力与阻力臂的乘积,即 F1L1 = F2L2。
2. 当动力臂大于阻力臂时,杠杆处于省力状态;当动力臂小于阻力臂时,杠杆处于费力状态。
3. 改变钩码的位置和数量,可以改变杠杆的平衡状态。
六、实验结论通过本实验,我们成功地探究了杠杆的平衡条件,掌握了杠杆在日常生活和工程中的应用。
在今后的学习和工作中,我们可以利用杠杆原理解决实际问题,提高工作效率。
一、实验目的本次实验旨在通过实际操作,验证杠杆原理的正确性,加深对杠杆平衡条件的理解,掌握杠杆在实际生活中的应用。
二、实验原理杠杆原理是物理学中一个重要的原理,最早由古希腊学者阿基米德总结得出。
杠杆平衡条件是指:动力乘以动力臂等于阻力乘以阻力臂,即 F1L1 = F2L2。
其中,F1为动力,L1为动力臂,F2为阻力,L2为阻力臂。
三、实验仪器与材料1. 杠杆:一根两端可固定,长度可调节的硬棒。
2. 动力:一个可调节的弹簧测力计。
3. 阻力:一个可调节的重物。
4. 支点:一个固定点,用于支撑杠杆。
5. 记录工具:尺子、笔记本、笔等。
四、实验步骤1. 将杠杆固定在支点上,调整杠杆长度,使其两端处于水平位置。
2. 将动力和阻力分别挂在杠杆两端,确保杠杆平衡。
3. 记录动力、阻力、动力臂和阻力臂的数值。
4. 调整动力或阻力,观察杠杆是否仍然保持平衡,记录数据。
5. 改变杠杆长度,重复步骤3-4,观察杠杆平衡条件的变化。
五、实验结果与分析1. 在实验过程中,我们按照杠杆平衡条件 F1L1 = F2L2,进行了多次实验。
结果显示,在动力和阻力、动力臂和阻力臂满足平衡条件的情况下,杠杆保持平衡。
2. 当动力或阻力发生变化时,杠杆不再保持平衡。
通过调整动力或阻力,使杠杆重新达到平衡,我们发现,调整后的动力和阻力、动力臂和阻力臂仍满足平衡条件。
3. 改变杠杆长度,实验结果仍然符合杠杆平衡条件。
这说明,杠杆平衡条件在杠杆长度变化时仍然成立。
六、实验结论1. 杠杆原理在实际生活中具有广泛的应用,如撬棒、剪刀、钳子等工具都是基于杠杆原理设计的。
2. 通过本次实验,我们验证了杠杆平衡条件的正确性,加深了对杠杆原理的理解。
3. 在实际应用中,掌握杠杆平衡条件,有助于我们更好地利用杠杆原理,提高工作效率。
七、实验反思1. 本次实验过程中,我们发现,在实际操作中,杠杆的平衡状态容易受到外界因素的影响,如摩擦力、杠杆质量等。
在今后的实验中,我们将注意这些因素的影响,提高实验结果的准确性。
一、实验目的通过本实验,了解杠杆原理在密码学中的应用,探究杠杆密码的构造方法及其解密过程,加深对物理力学原理和密码学基础知识的理解。
二、实验原理杠杆密码是一种基于杠杆原理的密码,通过改变杠杆的长度和力臂的比例,实现对信息的加密和解密。
加密时,将信息转化为杠杆上的力矩关系,解密时,根据力矩关系还原出原始信息。
三、实验器材1. 杠杆(直杆或曲杆)2. 支点(固定点)3. 力点(施加力的点)4. 重点(受力点)5. 力矩尺(测量力矩的尺子)6. 记录本四、实验步骤1. 搭建杠杆密码系统:a. 将杠杆固定在支点上,使杠杆水平。
b. 在杠杆的一端设置力点,另一端设置重点。
c. 在力点和重点之间设置支点,调整支点的位置,使杠杆保持水平。
2. 加密信息:a. 将要加密的信息记录在力矩尺上,每个字符对应一个力矩值。
b. 根据力矩值,在力点和重点之间移动杠杆,使力矩达到相应的数值。
c. 记录下杠杆的平衡位置,即加密后的密码。
3. 解密信息:a. 将加密后的密码记录在力矩尺上。
b. 根据力矩值,在力点和重点之间移动杠杆,使力矩达到相应的数值。
c. 观察杠杆的平衡位置,根据力矩尺上的信息还原出原始信息。
五、实验数据与分析1. 实验数据:| 信息 | 力矩值 | 杠杆平衡位置 || ---- | ------ | ------------ || A | 5 | 2cm || B | 10 | 3cm || C | 15 | 4cm |2. 分析:通过实验数据可以看出,加密后的密码与力矩值相对应,解密时根据力矩值移动杠杆,即可还原出原始信息。
这表明杠杆密码系统在加密和解密过程中具有良好的可逆性。
六、实验结论1. 杠杆密码是一种基于杠杆原理的密码,通过改变杠杆的长度和力臂的比例,实现对信息的加密和解密。
2. 杠杆密码系统在加密和解密过程中具有良好的可逆性,具有一定的安全性。
3. 本实验加深了对物理力学原理和密码学基础知识的理解,为今后研究更复杂的密码系统提供了参考。