工业机器人工作站系统集成-B(答案)
- 格式:doc
- 大小:549.00 KB
- 文档页数:3

学年第学期期末试卷 B 卷首页课程名称:工业机器人工作站系统集成出卷教师:任课教师:出卷日期:年月日考试班级:教学团队审核意见:签名:日期:年月日系(部)审核意见:签名:日期:年月日试题分布情况答案及评分标准(请与试题分开):一、填空题(每空1分,共30分)1、ABB、安川2、示教模式、再现模式、远程模式3、伺服电源4、100、OFF、ON5、绝对编码器6、D、57、编码器、新电池组8、远程9、连续轨迹型、点位型10、工业机器人本体、机器人控制柜、末端执行器、输送线、外围控制系统11、暂停、急停12、法兰13、外部轴、同步14、翻转变位15、焊枪、母材二、判断题(每题2分,共20分)1(×) 2(√) 3(×) 4(√) 5(√)6(√) 7(√) 8(√) 9(×) 10(√)三、分析题(共30分)1、(10分)a图4分,IN1线1分,IN2线1分,COM线2分;b图6分,IN1线1分,IN2线1分,COM线2分,PC线2分;a)使用变频器内部电源 b)使用变频器外部电源2、(10分)3、(10分)1)当使用外部急停时,跳线一定要拆除。
如果不拆除,外部急停信号无效,将导致机器人无法停止的事故。
(3分)2)采用双回路急停,可以防止外部急停信号当有一个常闭触头由于故障不能断开时,出现机器人不能急停的事故。
二个触头只要有一个断开,就可以保证机器人急停,降低了不能急停的概率,提高了系统的安全性。
(4分)3)机器人急停后,需要通过操作机器人示教器,在示教模式下,使机器人回到作业原点,然后再重新控制机器人运行。
(3分)四、综合应用题(共20分)(1)(5分)(2)(5分)少一个步骤扣0.5分。
(3)(5分)每少一个功能扣0.5分。
(4)(5分每少一个功能扣0.5分。
一、选择题(每题2分,共20分)1. 下列()不是机器人选型须考虑的因素。
A. 应用类型B. 工作范围C. 自由度D. 外观2. 在设计末端执行器时,会考虑末端执行器设计要素、操作参数以及物件特征,下列不属于物件特征的是()。
A.尺寸大小B. 表面状态C. 强度D. 抓取力3. 下列哪种光线常被用来检测物体表面微小划痕。
()A. 红光B.蓝光 D. 白光 E.紫外线4. 活塞式空压机在工作时,活塞向右移动时,气缸内活塞左腔的压力低于大气的压力,吸气阀开启,外界空气进入缸内,这个过程称为()。
A. 吸气过程B. 压缩过程C. 排气过程5. 位置传感器是能感受被测物的位置并转换成可用输出信号的传感器,位置传感器有时也叫()。
A. 位移传感器B.距离传感器C. 接近开关6. I/O点数为128的PLC属于()。
A. 小型PLCB. 超小型PLCC. 中型PLCD. 大型PLC7. 存储容量为16kB的PLC属于()。
A. 小型PLCB. 超小型PLCC. 中型PLCD. 大型PLC8. 西门子200smart st40 PLC的输入点数为(),输出点数为()。
A. 24,32B. 32,24C. 16,24D. 24,169. Fanuc LR Mate 200iD/4s机器人控制柜选用()电。
A. 单相B. 双相C. 三相10. 焊枪喷嘴下部的圆柱形通道通道直径越(),保护范围越(),但可达性变差。
A. 小,宽B. 大,宽C. 小,窄D. 大,窄二、判断题(每题1分,共10分)1. 平行开闭式末端执行器与其质量有直接联系。
()2. 吸附类末端执行器吸持物件时会破坏物件的表面质量。
()3. 在视觉系统的选型中,需要先对相机进行选型,然后选择镜头最后选择光源。
()4. 从光学知识可以知道,测量时使用的光线波长越短,可测的精度越低。
()5. 自身不发光的物体所表现出的颜色取决于它所吸收的光波波长。
()6. C型相机不能和CS型镜头配接。
工业机器人工作站系统集成在当今制造业的舞台上,工业机器人工作站系统集成正发挥着日益关键的作用。
它就像是一个精心编排的交响乐团,将机器人、控制器、周边设备等各种元素巧妙地组合在一起,共同奏响高效生产的乐章。
工业机器人工作站系统集成是什么呢?简单来说,它是将工业机器人与相关的设备、工具、传感器以及控制系统进行整合,构建一个能够协同工作、完成特定生产任务的整体解决方案。
这个过程可不是简单地把各种部件拼凑在一起,而是需要深入理解生产需求,精心设计系统架构,精确调试参数,以确保整个工作站能够稳定、高效地运行。
想象一下,在一个汽车生产车间里,工业机器人正在忙碌地工作。
有的机器人负责焊接车身,有的负责喷漆,还有的负责装配零部件。
这些机器人并不是孤立存在的,它们在一个集成的系统中相互配合,遵循着精确的指令和流程,有条不紊地完成着各自的任务。
这就是工业机器人工作站系统集成的一个生动例子。
要实现一个成功的工业机器人工作站系统集成,首先得明确生产任务和目标。
这就好比盖房子之前要先知道要盖什么样的房子,是别墅、公寓还是写字楼。
只有清楚了需求,才能选择合适的机器人类型、规格和性能参数。
比如说,如果是需要进行精细的电子元件装配,可能就需要精度高、动作灵活的小型机器人;而如果是要搬运重物,那就得选用承载能力强、力量大的大型机器人。
接下来,就是选择合适的周边设备和工具。
这包括夹具、喷枪、焊枪、传送带等等。
这些设备的选择要与机器人的动作和功能相匹配,同时还要考虑到生产线上的物料流动、空间布局等因素。
就像给机器人配备了合适的“武器”,让它们能够在生产过程中发挥最大的作用。
控制系统就像是整个工作站的大脑,负责指挥机器人和周边设备的动作。
一个优秀的控制系统能够实现精确的运动控制、协调各个设备之间的工作顺序、处理各种传感器的信号,并且能够根据生产情况进行实时调整和优化。
它要具备强大的计算能力、稳定的性能和友好的人机界面,方便操作人员进行监控和管理。
考试学期开课部门考试课程 工业机器人工作站系统集成(B 卷)考试班级 考试形式闭卷题号 一 二 三 四 五 六 七 八 九 …… 总分 得分本试卷共 5 页,请核对试卷页数,班级、姓名等信息写在左侧,否则试卷无效。
一、填空题(每空1分,共30分)1、工业机器人生产厂家有 、 、FANUC 等。
2、安川DX100示教器上有机器人工作模式选择开关,分别是: 、和 。
3、启动机器人时,首先接通机器人的 ,然后再启动机器人运行。
4、安川机器人的伺服接通命令的时间长度为 ms 以上,当机器人急停后,要重新使机器人伺服使能,伺服命令必须先 再重新 。
5、工业机器人利用 检测各个关节所处的位置与姿态。
6、工业机器人本体必须采用 种接地,使用 mm 2以上的接地线,绝对避免与其他电力、动力、焊机等共用接地线。
7、更换机器人电池时,为了防止 数据丢失,必须先连接 ,再拆旧电池组。
8、如果用外部信号控制机器人运行,机器人的工作模式应选择 模式。
9、弧焊机器人的运行轨迹属于 ,点焊机器人的运行轨迹属于 。
10、搬运机器人工作站一般包括 、 、、 等设备,并与 相 连接,以形成一个完整的集成化的搬运系统。
11、机器人防碰撞传感器动作时,可规定机器人的停止方式,有 和 两种停止方式可选。
12、安川MA1400为弧焊专用机器人,焊枪与机器人手臂可直接通过 连接。
13、如果采用伺服电机驱动变位机翻转,可将变位机作为机器人的 ,与机器人实现联动,达到 运行的目的。
14、焊接变位机承载工件及焊接所需的工装,主要作用是实现焊接过程中将工件进行 ,以便获得最佳的焊接位置。
15、机器人弧焊电源焊接侧输出电源与 连接的为正极,与 连接的为负极。
二、判断题(每题2分,共20分)( )1、多台机器人焊接电源+单工位焊接夹具,如下图,焊接地线(-)的连接方法应该为A 图。
A B( )2、EtherCAT 是基于以太网,但比以太网更高速和高效的一种高性能工业网络系统。
一、填空题1、工业机器人通常由执行机构、驱动系统、控制系统、传感系统四部分组成。
2、工业机器人手部工作原理不同,结构形式不同按其夹持原理不同,可以分为机械式、磁力式和真空式三种。
3、电气设备包含用于轴1至轴6电机的所有电机电缆和控制电缆。
4、工业机器人外围设施的电气连接包括防护门的电气连接、静电保护的连接。
5、工业机器人工作站集成一般包括硬件集成、和软件集成两个过程。
硬件集成需要根据需要对各个设备接口进行统一定义,以满足通信要求;软件集成则需要对整个系统的信息流进行综合,然后再控制各个设备按流程运转。
6、工业机器人工作站设计过程包括可行性分析、工作站和生产线的详细设计、制造与运行、交付使用四部完成。
7、工业机器人弧焊工作站主要由机器人系统、焊枪、焊接电源、送丝机构、焊接变位机等组成。
8、焊枪导电嘴为机器人移动TCP点,机器人的运动主要由各轴单独运动、TCP点直线运动、机器人姿态运动3种运动方式。
9、安川MA1400机器人包括机器人本体、DX100控制柜、示教器组成。
10、DX100控制柜主要由控制柜冷却、电源接通单元、基本轴控制基板、CPU单元、CPS单元、断路器基板、I/O单元、机械安全单元、机器人专用输入端子台、伺服单元组成。
11、电源接通单元是由电源接通顺序基板和伺服电源接触器以及线路滤波器组成。
12、电源接通单元根据来自电源接通顺序基板的伺服电源控制信号的状态,打开或关闭伺服电源接触器,供给伺服单元电源,电源接通单元经过线路滤波器对控制电源供给电源。
13、CPU单元是由控制器电源基板与基本架、控制基板、机器人I/F单元和轴控制基板组成。
14、伺服单元主要由变频器及PWM放大器构成。
15、弧焊工作站中需要根据材质或焊缝的特性来调整焊接电压或电流的大小及是否需要摆动,用程序数据来控制这些变化的因素通过设定焊接参数、起弧收弧参数、摆弧参数来实现。
16、盛放二氧化碳气体的气瓶一般分为飞虹吸式、虹吸式两种。
1. 工业机器人的核心部件是:A. 控制系统B. 机械臂C. 传感器D. 驱动系统答案:A2. 机器人编程语言中最常用的是:A. BASICB. C++C. RAPIDD. Python答案:C3. 以下哪种传感器常用于机器人的位置检测?A. 温度传感器B. 压力传感器C. 编码器D. 光电传感器答案:C4. 机器人末端执行器通常被称为:A. 手腕B. 手爪C. 臂D. 基座答案:B5. 工业机器人通常使用哪种通信协议进行数据交换?A. HTTPB. TCP/IPC. ModbusD. Bluetooth答案:C6. 机器人的重复定位精度是指:A. 机器人能够达到的最大速度B. 机器人在多次操作中达到同一位置的能力C. 机器人的最大工作范围D. 机器人的最小操作精度答案:B7. 以下哪种机器人应用最广泛?A. 服务机器人B. 工业机器人C. 军事机器人D. 医疗机器人答案:B8. 机器人视觉系统中,用于物体识别的主要技术是:A. 红外技术B. 超声波技术C. 计算机视觉D. 激光扫描答案:C9. 机器人的安全标准通常由哪个组织制定?A. ISOB. IEEEC. ANSID. ASTM答案:A10. 机器人编程中,示教编程的英文缩写是:A. TPB. PPC. MPD. AP答案:A11. 机器人控制系统中,用于处理传感器数据的部分是:A. 输入模块B. 输出模块C. 处理模块D. 存储模块答案:C12. 机器人的工作空间是指:A. 机器人能够达到的所有位置的集合B. 机器人的物理尺寸C. 机器人的操作精度D. 机器人的最大负载答案:A13. 机器人运动学研究的是:A. 机器人的动力来源B. 机器人的运动规律C. 机器人的控制系统D. 机器人的传感器技术答案:B14. 机器人的负载能力通常以什么单位表示?A. 千克B. 牛顿C. 瓦特D. 焦耳答案:A15. 机器人编程中,用于描述机器人路径的术语是:A. 轨迹B. 速度C. 加速度D. 力矩答案:A16. 机器人系统集成中,用于连接不同设备的部分是:A. 接口B. 控制器C. 传感器D. 执行器答案:A17. 机器人的编程环境通常包括:A. 文本编辑器B. 图形界面C. 调试工具D. 以上都是答案:D18. 机器人系统集成中,用于提高系统稳定性的技术是:A. 冗余设计B. 模块化设计C. 标准化设计D. 定制化设计答案:A19. 机器人的动力系统通常包括:A. 电池B. 电机C. 液压系统D. 以上都是答案:D20. 机器人编程中,用于优化机器人运动效率的算法是:A. 路径规划算法B. 碰撞检测算法C. 力控制算法D. 速度控制算法答案:A21. 机器人的控制系统通常包括:A. 硬件部分B. 软件部分C. 用户界面D. 以上都是答案:D22. 机器人系统集成中,用于提高系统灵活性的技术是:A. 冗余设计B. 模块化设计C. 标准化设计D. 定制化设计答案:B23. 机器人的编程语言中,用于描述机器人动作的术语是:A. 指令B. 函数C. 变量D. 类答案:A24. 机器人系统集成中,用于提高系统可靠性的技术是:A. 冗余设计B. 模块化设计C. 标准化设计D. 定制化设计答案:A25. 机器人的编程中,用于描述机器人状态的术语是:A. 变量B. 函数C. 指令D. 类答案:A26. 机器人系统集成中,用于提高系统效率的技术是:A. 冗余设计B. 模块化设计C. 标准化设计D. 定制化设计答案:C27. 机器人的编程中,用于描述机器人逻辑的术语是:A. 变量B. 函数C. 指令D. 类答案:B28. 机器人系统集成中,用于提高系统安全性的技术是:A. 冗余设计B. 模块化设计C. 标准化设计D. 定制化设计答案:A29. 机器人的编程中,用于描述机器人行为的术语是:A. 变量B. 函数C. 指令D. 类答案:C30. 机器人系统集成中,用于提高系统可维护性的技术是:A. 冗余设计B. 模块化设计C. 标准化设计D. 定制化设计答案:B31. 机器人的编程中,用于描述机器人数据处理的术语是:A. 变量B. 函数C. 指令D. 类答案:B32. 机器人系统集成中,用于提高系统可扩展性的技术是:A. 冗余设计B. 模块化设计C. 标准化设计D. 定制化设计答案:B33. 机器人的编程中,用于描述机器人输入输出的术语是:A. 变量B. 函数C. 指令D. 类答案:A34. 机器人系统集成中,用于提高系统可重用性的技术是:A. 冗余设计B. 模块化设计C. 标准化设计D. 定制化设计答案:B35. 机器人的编程中,用于描述机器人控制流程的术语是:A. 变量B. 函数C. 指令D. 类答案:C36. 机器人系统集成中,用于提高系统可测试性的技术是:A. 冗余设计B. 模块化设计C. 标准化设计D. 定制化设计答案:B37. 机器人的编程中,用于描述机器人数据存储的术语是:A. 变量B. 函数C. 指令D. 类答案:A38. 机器人系统集成中,用于提高系统可配置性的技术是:A. 冗余设计B. 模块化设计C. 标准化设计D. 定制化设计答案:B39. 机器人的编程中,用于描述机器人数据传输的术语是:A. 变量B. 函数C. 指令D. 类答案:A40. 机器人系统集成中,用于提高系统可管理性的技术是:A. 冗余设计B. 模块化设计C. 标准化设计D. 定制化设计答案:B41. 机器人的编程中,用于描述机器人数据处理的术语是:A. 变量B. 函数C. 指令D. 类答案:B42. 机器人系统集成中,用于提高系统可监控性的技术是:A. 冗余设计B. 模块化设计C. 标准化设计D. 定制化设计答案:B43. 机器人的编程中,用于描述机器人数据分析的术语是:A. 变量B. 函数C. 指令D. 类答案:B44. 机器人系统集成中,用于提高系统可诊断性的技术是:A. 冗余设计B. 模块化设计C. 标准化设计D. 定制化设计答案:B45. 机器人的编程中,用于描述机器人数据优化的术语是:A. 变量B. 函数C. 指令D. 类答案:B46. 机器人系统集成中,用于提高系统可预测性的技术是:A. 冗余设计B. 模块化设计C. 标准化设计D. 定制化设计答案:B47. 机器人的编程中,用于描述机器人数据管理的术语是:A. 变量B. 函数C. 指令D. 类答案:B48. 机器人系统集成中,用于提高系统可调整性的技术是:A. 冗余设计B. 模块化设计C. 标准化设计D. 定制化设计答案:B49. 机器人的编程中,用于描述机器人数据控制的术语是:A. 变量B. 函数C. 指令D. 类答案:B50. 机器人系统集成中,用于提高系统可适应性的技术是:A. 冗余设计B. 模块化设计C. 标准化设计D. 定制化设计答案:B51. 机器人的编程中,用于描述机器人数据优化的术语是:A. 变量B. 函数C. 指令D. 类答案:B52. 机器人系统集成中,用于提高系统可扩展性的技术是:A. 冗余设计B. 模块化设计C. 标准化设计D. 定制化设计答案:B53. 机器人的编程中,用于描述机器人数据管理的术语是:A. 变量B. 函数C. 指令D. 类答案:B54. 机器人系统集成中,用于提高系统可调整性的技术是:A. 冗余设计B. 模块化设计C. 标准化设计D. 定制化设计答案:B55. 机器人的编程中,用于描述机器人数据控制的术语是:A. 变量B. 函数C. 指令D. 类答案:B56. 机器人系统集成中,用于提高系统可适应性的技术是:A. 冗余设计B. 模块化设计C. 标准化设计D. 定制化设计答案:B57. 机器人的编程中,用于描述机器人数据优化的术语是:A. 变量B. 函数C. 指令D. 类答案:B58. 机器人系统集成中,用于提高系统可扩展性的技术是:A. 冗余设计B. 模块化设计C. 标准化设计D. 定制化设计答案:B59. 机器人的编程中,用于描述机器人数据管理的术语是:A. 变量B. 函数C. 指令D. 类答案:B60. 机器人系统集成中,用于提高系统可调整性的技术是:A. 冗余设计B. 模块化设计C. 标准化设计D. 定制化设计答案:B61. 机器人的编程中,用于描述机器人数据控制的术语是:A. 变量B. 函数C. 指令D. 类答案:B62. 机器人系统集成中,用于提高系统可适应性的技术是:A. 冗余设计B. 模块化设计C. 标准化设计D. 定制化设计答案:B63. 机器人的编程中,用于描述机器人数据优化的术语是:A. 变量B. 函数C. 指令D. 类答案:B64. 机器人系统集成中,用于提高系统可扩展性的技术是:A. 冗余设计B. 模块化设计C. 标准化设计D. 定制化设计答案:B答案:1. A2. C3. C5. C6. B7. B8. C9. A10. A11. C12. A13. B14. A15. A16. A17. D18. A19. D20. A21. D22. B23. A24. A25. A26. C27. B28. A29. C30. B31. B32. B33. A34. B35. C36. B37. A38. B39. A40. B41. B42. B43. B44. B45. B46. B47. B48. B49. B50. B51. B52. B53. B55. B56. B57. B58. B59. B60. B61. B62. B63. B64. B。
1. 工业机器人系统集成的主要目的是什么?A. 提高生产效率B. 降低成本C. 增强灵活性D. 以上都是2. 在机器人系统集成中,什么是“示教编程”?A. 使用计算机软件进行编程B. 通过手动移动机器人来记录路径C. 使用语音命令进行编程D. 以上都不是3. 机器人系统集成中常用的通信协议是?A. TCP/IPB. ModbusC. EtherCATD. 以上都是4. 在机器人系统集成中,什么是“离线编程”?A. 在机器人运行时进行编程B. 在机器人不运行时进行编程C. 在机器人外部进行编程D. 以上都不是5. 机器人系统集成中,传感器的主要作用是?A. 提供动力B. 收集环境信息C. 控制机器人移动D. 以上都不是6. 在机器人系统集成中,什么是“碰撞检测”?A. 检测机器人是否与其他物体碰撞B. 检测机器人是否与电源碰撞C. 检测机器人是否与网络碰撞D. 以上都不是7. 机器人系统集成中,什么是“路径规划”?A. 规划机器人的运动路径B. 规划机器人的电源路径C. 规划机器人的网络路径D. 以上都不是8. 在机器人系统集成中,什么是“协作机器人”?A. 与人类共同工作的机器人B. 与其他机器人共同工作的机器人C. 与计算机共同工作的机器人D. 以上都不是9. 机器人系统集成中,什么是“机器视觉”?A. 使用摄像头进行图像处理B. 使用麦克风进行声音处理C. 使用传感器进行环境处理D. 以上都不是10. 在机器人系统集成中,什么是“控制系统”?A. 控制机器人的硬件B. 控制机器人的软件C. 控制机器人的运动D. 以上都是11. 机器人系统集成中,什么是“伺服电机”?A. 提供动力的电机B. 控制机器人运动的电机C. 提供信号的电机D. 以上都不是12. 在机器人系统集成中,什么是“PLC”?A. 可编程逻辑控制器B. 个人电脑C. 打印机D. 以上都不是13. 机器人系统集成中,什么是“机器人手臂”?A. 机器人的移动部分B. 机器人的固定部分C. 机器人的操作部分D. 以上都不是14. 在机器人系统集成中,什么是“末端执行器”?A. 机器人的手部B. 机器人的脚部C. 机器人的头部D. 以上都不是15. 机器人系统集成中,什么是“机器人编程语言”?A. 用于编程机器人的语言B. 用于编程计算机的语言C. 用于编程手机的语言D. 以上都不是16. 在机器人系统集成中,什么是“机器人仿真”?A. 在计算机上模拟机器人行为B. 在现实中模拟机器人行为C. 在网络中模拟机器人行为D. 以上都不是17. 机器人系统集成中,什么是“机器人控制柜”?A. 存放机器人控制器的柜子B. 存放机器人电源的柜子C. 存放机器人网络的柜子D. 以上都不是18. 在机器人系统集成中,什么是“机器人传感器”?A. 用于检测环境的设备B. 用于提供动力的设备C. 用于控制网络的设备D. 以上都不是19. 机器人系统集成中,什么是“机器人执行器”?A. 用于执行任务的设备B. 用于提供动力的设备C. 用于控制网络的设备D. 以上都不是20. 在机器人系统集成中,什么是“机器人编程”?A. 编写控制机器人的程序B. 编写控制计算机的程序C. 编写控制手机的程序D. 以上都不是21. 机器人系统集成中,什么是“机器人调试”?A. 调整机器人的参数B. 调整计算机的参数C. 调整手机的参数D. 以上都不是22. 在机器人系统集成中,什么是“机器人维护”?A. 保持机器人的正常运行B. 保持计算机的正常运行C. 保持手机的正常运行D. 以上都不是23. 机器人系统集成中,什么是“机器人校准”?A. 调整机器人的精度B. 调整计算机的精度C. 调整手机的精度D. 以上都不是24. 在机器人系统集成中,什么是“机器人安全”?A. 确保机器人的安全运行B. 确保计算机的安全运行C. 确保手机的安全运行D. 以上都不是25. 机器人系统集成中,什么是“机器人性能”?A. 机器人的工作效率B. 计算机的运行速度C. 手机的通信速度D. 以上都不是26. 在机器人系统集成中,什么是“机器人精度”?A. 机器人的工作精度B. 计算机的计算精度C. 手机的通信精度D. 以上都不是27. 机器人系统集成中,什么是“机器人可靠性”?A. 机器人的稳定运行B. 计算机的稳定运行C. 手机的稳定运行D. 以上都不是28. 在机器人系统集成中,什么是“机器人灵活性”?A. 机器人的适应能力B. 计算机的适应能力C. 手机的适应能力D. 以上都不是29. 机器人系统集成中,什么是“机器人自动化”?A. 机器人的自动运行B. 计算机的自动运行C. 手机的自动运行D. 以上都不是30. 在机器人系统集成中,什么是“机器人集成”?A. 将机器人与其他系统结合B. 将计算机与其他系统结合C. 将手机与其他系统结合D. 以上都不是31. 机器人系统集成中,什么是“机器人系统”?A. 由机器人组成的系统B. 由计算机组成的系统C. 由手机组成的系统D. 以上都不是32. 在机器人系统集成中,什么是“机器人控制”?A. 控制机器人的运行B. 控制计算机的运行C. 控制手机的运行D. 以上都不是33. 机器人系统集成中,什么是“机器人操作”?A. 操作机器人的运行B. 操作计算机的运行C. 操作手机的运行D. 以上都不是34. 在机器人系统集成中,什么是“机器人应用”?A. 机器人的使用场景B. 计算机的使用场景C. 手机的使用场景D. 以上都不是35. 机器人系统集成中,什么是“机器人技术”?A. 机器人的相关技术B. 计算机的相关技术C. 手机的相关技术D. 以上都不是36. 在机器人系统集成中,什么是“机器人发展”?A. 机器人的技术进步B. 计算机的技术进步C. 手机的技术进步D. 以上都不是37. 机器人系统集成中,什么是“机器人趋势”?A. 机器人的发展方向B. 计算机的发展方向C. 手机的发展方向D. 以上都不是38. 在机器人系统集成中,什么是“机器人市场”?A. 机器人的销售市场B. 计算机的销售市场C. 手机的销售市场D. 以上都不是39. 机器人系统集成中,什么是“机器人竞争”?A. 机器人的市场竞争B. 计算机的市场竞争C. 手机的市场竞争D. 以上都不是40. 在机器人系统集成中,什么是“机器人合作”?A. 机器人与其他系统的合作B. 计算机与其他系统的合作C. 手机与其他系统的合作D. 以上都不是41. 机器人系统集成中,什么是“机器人创新”?A. 机器人的新技术B. 计算机的新技术C. 手机的新技术D. 以上都不是42. 在机器人系统集成中,什么是“机器人挑战”?A. 机器人的技术难题B. 计算机的技术难题C. 手机的技术难题D. 以上都不是43. 机器人系统集成中,什么是“机器人机遇”?A. 机器人的发展机会B. 计算机的发展机会C. 手机的发展机会D. 以上都不是44. 在机器人系统集成中,什么是“机器人风险”?A. 机器人的潜在风险B. 计算机的潜在风险C. 手机的潜在风险D. 以上都不是45. 机器人系统集成中,什么是“机器人策略”?A. 机器人的发展策略B. 计算机的发展策略C. 手机的发展策略D. 以上都不是46. 在机器人系统集成中,什么是“机器人管理”?A. 机器人的运营管理B. 计算机的运营管理C. 手机的运营管理D. 以上都不是47. 机器人系统集成中,什么是“机器人培训”?A. 机器人的操作培训B. 计算机的操作培训C. 手机的操作培训D. 以上都不是48. 在机器人系统集成中,什么是“机器人支持”?A. 机器人的技术支持B. 计算机的技术支持C. 手机的技术支持D. 以上都不是49. 机器人系统集成中,什么是“机器人服务”?A. 机器人的售后服务B. 计算机的售后服务C. 手机的售后服务D. 以上都不是50. 在机器人系统集成中,什么是“机器人解决方案”?A. 机器人的问题解决方法B. 计算机的问题解决方法C. 手机的问题解决方法D. 以上都不是答案:1. D2. B3. D4. C5. B6. A7. A8. A9. A10. D11. B12. A13. C14. A15. A16. A17. A18. A19. A20. A21. A22. A23. A24. A25. A26. A27. A28. A29. A30. A31. A32. A33. A34. A35. A36. A37. A38. A39. A40. A41. A42. A43. A44. A45. A46. A47. A48. A49. A50. A。
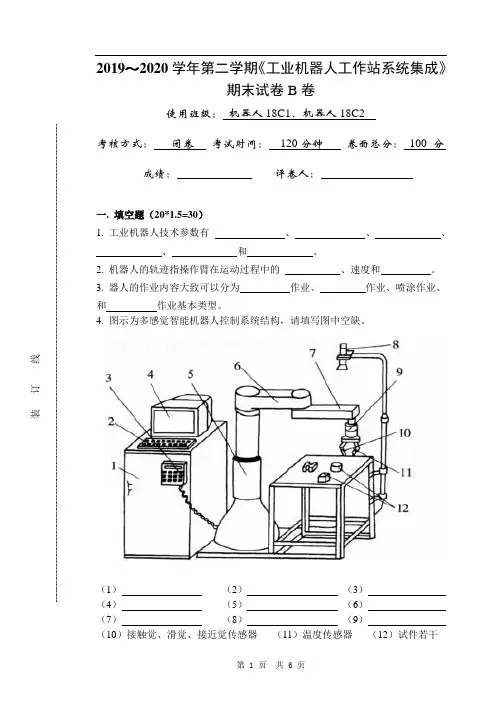
2019~2020学年第二学期《工业机器人工作站系统集成》期末试卷B卷使用班级:机器人18C1、机器人18C2考核方式:闭卷考试时间:120分钟卷面总分:100 分成绩:评卷人:一. 填空题(20*1.5=30)1. 工业机器人技术参数有、、、、和。
2. 机器人的轨迹指操作臂在运动过程中的、速度和。
3. 器人的作业内容大致可以分为作业、作业、喷涂作业、和作业基本类型。
4. 图示为多感觉智能机器人控制系统结构,请填写图中空缺。
线订装(1)(2)(3)(4)(5)(6)(7)(8)(9)(10)接触觉、滑觉、接近觉传感器(11)温度传感器(12)试件若干二. 分析题(20)如图所示某车间布局图,需设计机器人配合输送线系统,由物品(铅块)存放处码垛后通过输送线分配至各生产工位,机器人抓取频率每分钟约3次,重量50kg,目标抓取物品体积尺寸为:600*80*100mm,请根据生产需求对该自动化工艺进行分析,并回答以下问题。
1.请写出工业机器人自动搬运分拣工作站主要组成部分?(10)2 . 该工业机器人自动搬运系统采用哪种机器人进行操作,并说出选用该类机器人的依据?(10)三、分析题(30*1=30)下图为一机加工件搬运工作站,末端执行器为气吸附,请阅读图示并描述相关运行轨迹,并依据运行轨迹填充以下空白。
四. 分析题(20)1. 简述装配机器人本体与焊接、涂装机器人本体有何不同?(6)2. 依据下图画出鼠标装配中,Ⅰ、Ⅱ托盘上零件装配运动轨迹示意图,并进行解释说明。
(14)线订装命题人:吕亚男校对:。
学年第学期期末试卷 B 卷首页
课程名称:工业机器人工作站系统集成出卷教师:
任课教师:出卷日期:年月日考试班级:
教学团队审核意见:
签名:日期:年月日系(部)审核意见:
签名:日期:年月日
试题分布情况
答案及评分标准(请与试题分开):一、填空题(每空1分,共30分)
1、ABB、安川
2、示教模式、再现模式、远程模式
3、伺服电源
4、100、OFF、ON
5、绝对编码器
6、D、5
7、编码器、新电池组
8、远程
9、连续轨迹型、点位型
10、工业机器人本体、机器人控制柜、末端执行器、输送线、外围控制系统
11、暂停、急停
12、法兰
13、外部轴、同步
14、翻转变位
15、焊枪、母材
二、判断题(每题2分,共20分)
1(×) 2(√) 3(×) 4(√) 5(√)6(√) 7(√) 8(√) 9(×) 10(√)
三、分析题(共30分)
1、(10分)
a图4分,IN1线1分,IN2线1分,COM线2分;b图6分,IN1线1分,IN2线1分,COM线2分,PC线2分;
a)使用变频器内部电源 b)使用变频器外部电源
2、(10分)
3、(10分)
1)当使用外部急停时,跳线一定要拆除。
如果不拆除,外部急停信号无效,将导
致机器人无法停止的事故。
(3分)
2)采用双回路急停,可以防止外部急停信号当有一个常闭触头由于故障不能断开时,
出现机器人不能急停的事故。
二个触头只要有一个断开,就可以保证机器人急停,降
低了不能急停的概率,提高了系统的安全性。
(4分)
3)机器人急停后,需要通过操作机器人示教器,在示教模式下,使机器人回到作业
原点,然后再重新控制机器人运行。
(
3分)
四、综合应用题(共20分)
(1)(5分)
(2)(5分)少一个步骤扣0.5分。
(3)(5分)每少一个功能扣0.5分。
(4)(5分每少一个功能扣0.5分。