MotoSimEG-VRC安川机器人虚拟调试 第五节 点焊加走行轴
- 格式:pdf
- 大小:312.59 KB
- 文档页数:4
motosimeg-vrc概述英文版Overview of Motosimeg-VRCMotosimeg-VRC, a cutting-edge technology in the realm of robotics, has been revolutionizing the way we interact with machines. This article aims to provide a comprehensive overview of Motosimeg-VRC, its features, applications, and potential impact on various industries.What is Motosimeg-VRC?Motosimeg-VRC stands for Motorized Simulation and Emulation for Virtual Reality Control. It is an advanced simulation software that enables users to control robots remotely through a virtual reality interface. This technology combines the power of simulation, robotics, and virtual reality to create a seamless user experience.Features of Motosimeg-VRCReal-time Simulation: Motosimeg-VRC provides real-time simulation of robot movements, allowing users to see the exact response of the robot to their commands in a virtual environment.Intuitive Interface: The virtual reality interface is designed to be intuitive and user-friendly, enabling even non-experts to operate robots with ease.Versatility: Motosimeg-VRC is compatible with a wide range of robots, making it a versatile tool for various applications.Safety Features: The simulation environment allows users to test and refine their commands without the risk of causing actual damage to the robot or the surrounding environment.Applications of Motosimeg-VRCManufacturing: Motosimeg-VRC can be used in manufacturing settings to simulate and refine robotic processes before implementing them in the real world.Space Exploration: In space exploration, robots play a crucial role. Motosimeg-VRC can help mission planners simulate and optimize robot movements in space environments.Military Applications: The technology can be used to simulate complex robotic missions in military operations, enabling better planning and execution.Education and Training: Motosimeg-VRC provides an excellent platform for educating and training students and professionals in robotics and virtual reality.ConclusionMotosimeg-VRC represents a significant leap forward in robotics technology. Its ability to simulate and control robots remotely through a virtual reality interface opens up a world of possibilities in various industries. As this technology continues to develop, we can expect it to revolutionize the way we interact with machines, making them safer, more efficient, and easier to use.中文版Motosimeg-VRC,这一机器人领域的尖端技术,正在改变我们与机器的交互方式。
安川机器人培训教程安川培训教程一、引言随着科技的不断发展,工业已成为现代制造业的重要组成部分。
安川作为全球领先的工业制造商之一,其产品广泛应用于各个领域。
为了更好地推广和应用安川,本教程旨在为广大用户提供一个全面、系统的培训课程,帮助大家熟练掌握安川的操作、编程和维护技能。
二、课程目标1.熟悉安川的基本结构、功能和性能特点;2.掌握安川的操作方法和编程技巧;3.学会安川的日常维护和故障排除;4.提高实际应用中安川的工作效率和稳定性。
三、课程内容1.安川概述(1)安川发展历程(2)安川产品系列及特点(3)安川应用领域2.安川基本结构(1)机械结构(2)电气系统(3)控制系统3.安川操作方法(1)开机与关机(2)示教器操作(3)坐标系设定(4)运动模式选择(5)速度、加速度设置4.安川编程技巧(1)编程语言简介(2)基本指令及功能(3)程序结构及编写方法(4)程序调试与优化5.安川日常维护与故障排除(1)日常检查与保养(2)易损件更换(3)故障诊断与排除(4)安全注意事项四、课程安排1.理论教学:讲解安川的基本知识、操作方法和编程技巧;2.实践操作:分组进行实际操作,熟悉安川的操作过程;3.案例分析:分析典型应用案例,掌握安川的应用技巧;4.互动环节:解答学员疑问,分享经验,提高培训效果;5.考核评估:对学员进行理论知识和实践操作考核,确保培训质量。
五、培训对象1.从事自动化设备维护、维修的技术人员;2.从事工业应用的技术人员;3.有志于从事工业相关工作的相关人员;4.大中专院校自动化、机电一体化等相关专业师生。
六、培训效果通过本教程的学习,学员将能够:1.熟练掌握安川的操作、编程和维护技能;2.提高实际工作中安川的应用效果;3.为企业降低生产成本、提高生产效率提供技术支持;4.增强个人职业竞争力,拓宽就业领域。
七、安川培训教程旨在为广大用户提供一个全面、系统的培训课程,帮助大家熟练掌握安川的操作、编程和维护技能。
安川仿真软件MotosimEG实用手册安川仿真软件MotosimEG实用手册1.欢迎使用MotosimEG1.1 简介1.2 功能概述1.3 系统要求1.4 安装与启动2.用户界面2.1 主界面介绍2.2 菜单栏功能2.3 工具栏功能2.4 状态栏说明3.项目管理3.1 新建项目3.2 打开项目3.3 保存项目3.4 导出项目3.5 关闭项目4.建模4.1 创建模型4.2 选择类型4.3 修改参数4.4 添加工具和末端执行器4.5 添加传感器和逻辑设备5.工作环境建模5.1 创建工作环境模型5.2 设置工作台面5.3 添加障碍物5.4 设置传感器和逻辑设备6.运动规划6.1 初步规划6.2 轨迹编辑器6.3 路径规划6.4 碰撞检测6.5 线路优化7.仿真与调试7.1 单步运行调试 7.2 轨迹回放7.3 异常情况处理7.4 数据记录与分析8.仿真结果评估8.1 运动性能分析 8.2 工作环境分析 8.3 运动数据分析8.4 风险评估9.参考资料9.1 用户手册9.2 技术文档9.3 问题解答9.4 常见故障排除附件:1.示例工程文件2.安装包及序列号法律名词及注释:1.MotosimEG:安川仿真软件的注册商标。
2.模型:指虚拟的实体,用于演示和分析运动。
3.工作环境模型:指虚拟的工作环境,用于仿真在特定场景下的运动。
4.轨迹编辑器:用于编辑运动轨迹的可视化工具。
5.路径规划:根据的目标位置和约束条件,计算出合适的运动路径。
6.碰撞检测:在仿真过程中,检测是否与工作环境中的障碍物发生碰撞。
7.异常情况处理:处理仿真过程中发生的错误、异常或不正常的情况。
8.数据记录与分析:记录仿真过程中的关键数据,并进行后续的分析和评估。
模块一工业机器人基础任务三 1+X测评一、填空题(1)工业机器人的坐标形式主要有直角坐标型、圆柱坐标型、球坐标型、和关节坐标型。
(2)直角坐标机器人的工作范围是立方体形状;圆柱坐标机器人的工作范围是圆柱体形状。
(3)工业机器人的常用坐标系有世界坐标系、工具坐标系、用户坐标系。
(4)谐波齿轮传送机构主要有波形发生器、柔轮、刚轮三个主要零件构成。
(5)世界第一台工业机器人是诞生于美国(地点)的 Unimate (名称)。
(6)机器人的常用末端工具有夹钳式末端执行器、吸附式末端执行器、专用末端执行器、工具快换装置等。
(7)常说的机器人四大家族是 FANUC 、 KUKA 、 ABB 、安川四大品牌。
(8)工业机器人由机器人本体、示教器、控制柜三大部分组成。
(9)工业机器人的主要技术参数有:额定负载、动作范围、定位精度、自由度、最大速度等。
(10)将机器人安装在滑轨等移动扩展轴上可以大大拓展机器人的工作范围。
二、判断题(1)工业机器人的机械结构系统由基座、手臂、手腕、末端操作器4大件组成。
(√)(2)直角坐标机器人的工作范围为圆柱形状。
(×)(3)机器人最大稳定速度高,允许的极限加速度小,则加减速的时间就会长一些。
(√)(4)机器人承载能力是指机器人在工作范围内的特定位姿上所能承受的最大质量。
(×)(5)一般工业机器人手臂具有4个自由度。
(×)(6)工业机器人的手我们一般称作末端操作器。
(√)(7)工业机器人控制系统的主要功能有示教再现功能与运动控制功能。
(√)(8)机器人示教器主要用于编写机器人程序。
(×)(9)工业机器人运动轴按其功能可划分为机器人轴、基座轴、工装轴。
(对勾)(10)机器人的世界坐标系、工具坐标系、用户坐标系都是关节坐标系。
(×)模块二工业机器人焊接系统任务五 1+X测评一、填空题1.焊接机器人根据焊接工艺类型可分为点焊机器人、弧焊机器人、激光焊接机器人等种类。

安川机器人操作及简单故障处理一.机器人简介1、硬件构成:我公司二期所用的日本安川公司机器人共有15 台,全部为MOTOMAN系列产品,共有SK120,SK6,SV3及UP6四种型号。
四种型号的机器人都是由机器人本体,控制柜两部分构成。
机器人本体上装有伺服马达,传动机构及减速机构等机械装置。
这几种型号的机器人都是有六个轴关节,由六台伺服马达和六套传动机构组成。
六个轴的名称分别为S、L、U、R、B、T轴,其中S轴控制整个本体的来回旋转、L轴控制机器人下臂的前后摆动、U轴控制机器人上臂上下摆动、R轴控制上臂的来回旋转、B轴控制机器人手腕的上下摆动、T轴控制手腕的来回旋转。
六个马达共同运动可以使机器人运行到其工作范围内的任意的一个空间位置。
控制柜内装有全部控制装置、再现操作盒及示教盘。
控制装置包括主计算机(CPU单元),伺服马达驱动器,各种外部信号输入输出板,电源装置等。
此系列机器人电源的额定输入为AC220V 50/60HZ三相电源,在国内使用时必须配备电源变压器。
再现操作盒上装有各种操作按纽、指示灯及通讯口等装置。
示教盘上有液晶显示器和各种操作按纽,主要用于编写程序、操作机器人及观察其工作状况等。
2、机器人工作方式:机器人的工作方式为示教再现型,即由操作者操作机器人完成一遍所有的预定动作,机器人记录下所走过各个位置点的坐标随后自动运行中按照示教的位置、速度完成所有动作。
机器人运动时的坐标系统有五个分别为:关节坐标系、直角坐标系、圆柱坐标系、工具坐标系和用户坐标系。
机器人在关节坐标系中运动方式为各轴单独运动互不影响;在直角坐标系中机器人以本体轴的X、Y、Z三个方向平行移动;在圆柱坐标系中机器人以本体轴Z轴为中心回旋、直角或平行移动;在工具坐标系中机器人以工具尖端点的X、Y、Z 轴平行移动;在用户坐标系中由用户在机器人工作的范围之内任意设定不同角度的X、Y、Z轴,机器人可延所设的各轴平行移动。
二.机器人的操作和程序的编写1、再现操作盒操作键说明:见P2-32、示教盘操作键说明:见P2-63、程序结构说明:机器人的程序语言为安川公司自己开发的专用语言(INFORM II),其指令主要分为移动指令、输入输出指令、控制指令和平移指令、运算指令等。
安川机器人操作及编程简易教程目录一、概述 (3)1. 安川机器人简介 (3)2. 教程目的与适用范围 (4)3. 教程所需软件与硬件要求 (5)二、机器人基本操作 (6)1. 机器人开机与关机操作 (7)1.1 开机步骤 (7)1.2 关机步骤 (7)2. 机器人手动操作模式 (8)2.1 机器人手动控制介绍 (9)2.2 手动操作界面介绍 (11)2.3 手动操作注意事项 (11)3. 机器人自动操作模式 (12)3.1 自动操作模式介绍 (14)3.2 自动操作程序设置步骤 (15)3.3 自动操作注意事项 (15)三、机器人编程基础 (16)1. 编程基础概念 (18)1.1 编程术语解析 (19)1.2 编程语言简介 (20)1.3 机器人编程流程 (21)2. 安川机器人编程语言介绍 (23)2.1 语言特点 (25)2.2 语法规则 (26)2.3 编程实例解析 (27)3. 机器人程序调试与运行 (28)3.1 程序调试步骤 (29)3.2 程序运行监控 (30)3.3 错误处理与故障排除 (31)四、机器人高级编程技术 (32)1. 高级编程技术概述 (33)2. 复杂程序编写实例解析 (34)2.1 多任务程序编写 (35)2.2 路径规划程序编写 (36)2.3 协同作业程序编写 (37)3. 高级编程技巧与注意事项 (38)3.1 编程优化技巧 (39)3.2 代码可维护性考虑 (40)3.3 安全防范措施讲解 (41)五、机器人维护与保养 (42)1. 机器人日常检查项目与步骤 (43)2. 机器人定期保养流程 (44)3. 机器人故障排除与处理方法 (45)4. 机器人维护与保养注意事项 (46)六、案例分析与实践操作指导 (47)一、概述随着科技的快速发展,人工智能和机器人技术已经成为当今世界的热门话题。
在制造业、医疗、服务业等领域,机器人已经得到了广泛的应用。
安川机器人作为一家知名的机器人制造商,为各种应用领域提供了高效、精准的机器人解决方案。
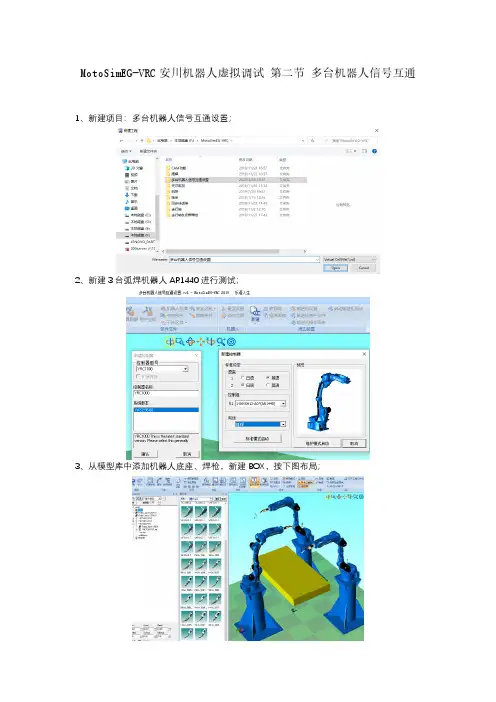
MotoSimEG-VRC安川机器人虚拟调试第二节多台机器人信号互通1、新建项目:多台机器人信号互通设置;
2、新建3台弧焊机器人AR1440进行测试;
3、从模型库中添加机器人底座、焊枪,新建BOX,按下图布局;
4、设置机器人工作原点;
5、新建程序,示教焊接路径;
6、接下来我们设置I/O信号,点击I/O连接管理器命令,打开I/O链接对话框,添加;
7、如下图,设置R2输入信号和R1输出信号的关系,确定;
8、重复上一步,设置R3输入信号,完成后如下图,关闭;
9、接下来在程序中添加I/O信号指令,使机器人1焊接完成后,另外两台机器人再开始焊接,首先在R1 程序末添加指令PULSE OT#(1)T=5,即R1输出信号OT1,5秒后信号自动关闭;
10、在R2和R3程序开头添加指令WAIT IN#(1)=ON,等待信号输入;
11、完成后点击播放按钮,可以看到R1焊接完成回到原点后R2和R3才开始焊接,图中焊道以红色显示,为了便于观察将焊道调的比较粗;
12、完成,保存,退出;。
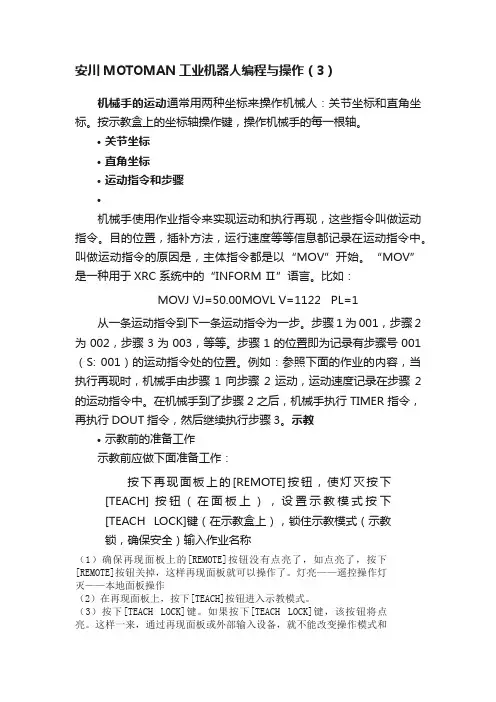
安川MOTOMAN工业机器人编程与操作(3)机械手的运动通常用两种坐标来操作机械人:关节坐标和直角坐标。
按示教盒上的坐标轴操作键,操作机械手的每一根轴。
•关节坐标•直角坐标•运动指令和步骤•机械手使用作业指令来实现运动和执行再现,这些指令叫做运动指令。
目的位置,插补方法,运行速度等等信息都记录在运动指令中。
叫做运动指令的原因是,主体指令都是以“MOV”开始。
“MOV”是一种用于XRC 系统中的“INFORM Ⅱ”语言。
比如:MOVJ VJ=50.00MOVL V=1122 PL=1从一条运动指令到下一条运动指令为一步。
步骤1为001,步骤2为002,步骤3为003,等等。
步骤1的位置即为记录有步骤号001(S: 001)的运动指令处的位置。
例如:参照下面的作业的内容,当执行再现时,机械手由步骤1向步骤2运动,运动速度记录在步骤2的运动指令中。
在机械手到了步骤2之后,机械手执行TIMER指令,再执行DOUT指令,然后继续执行步骤3。
示教•示教前的准备工作示教前应做下面准备工作:按下再现面板上的[REMOTE]按钮,使灯灭按下[TEACH] 按钮(在面板上),设置示教模式按下[TEACH LOCK]键(在示教盒上),锁住示教模式(示教锁,确保安全)输入作业名称(1)确保再现面板上的[REMOTE]按钮没有点亮了,如点亮了,按下[REMOTE]按钮关掉,这样再现面板就可以操作了。
灯亮——遥控操作灯灭——本地面板操作(2)在再现面板上,按下[TEACH]按钮进入示教模式。
(3)按下[TEACH LOCK]键。
如果按下[TEACH LOCK]键,该按钮将点亮。
这样一来,通过再现面板或外部输入设备,就不能改变操作模式和操作过程。
另外,如果[TEACH LOCK]键没有点亮,使用紧急制动开关,不能开启伺服电源。
(4)在顶部菜单中选择{JOB},并在子菜单中选择{CREATE NEW JOB}。
这时将显示输入行。
安川伺服电机参数基本调整动态参数调整步骤:步骤一.设定系统刚性(Fn 001)Kp : 位置回路比例增益(机床Kp 建议值30-90 /sec)Kv : 速度回路比例增益(机床Kv 建议值30-120 Hz)Ti : 速度回路积分增益(机床Ti 建议值10-30 ms)范例:步骤二. 自动调协(auto turning) 寻找马达与机床惯性比自动调协目的,主要是在计算马达与机床整合后有些动态参数会受到影响ex: 马达负载惯性比… ,如果不先将相关参数找出速度回路的表现会与Kv/Ti 设置的结果不一致自动调协操作步骤:1.参数Pn110设11。
(打开在线自动调谐功能)2.手动Jog床台让床台来回往复多次运行。
3.手动Jog床台时如发生共振现象,请立即压下紧急停止按钮,将驱动器参数Pn408设1(打开共振抑制功能),然受修正Pn409(共振抑制频率)设定,1米加工中心机建议Pn409设定200。
4.将Fn007内容写入EEPROM。
(按Mode键至Fn000→按Up或Down键至Fn007→持续按Data 键1秒显示负载贯性比→持续按Set键1秒后Fn007内容显示之负载贯量比即可写入EEPROM)5.参数Pn110设12。
(关闭在线自动调谐功能)步骤三.起动并设定驱动器抑制共振功能相关参数(Pn408设1即打开共振抑制功能,Pn409可设定共振抑制频率) 马达与机床结合后,除了马达选用太小,无法达到高响应之外,有时也会发生马达扭力够,但是因为机床床台传动刚性较差,会产生共振而无法达到高响应又平顺的控制目标,此时,除了加强机床的传动刚性外,可利用控制器抑制共振功能,而得到高响应的结果 .步骤四. 将速度回路增益参数再调高就位置回路控制而言,速度回路是内回路,内回路响应越高,外回路(位置回路)表现越如预期,比较不会受到外界切削力,磨擦力的影响,所以在切削应用场合,请将速度回路增益尽量调高,以得到更好的切削质量YASKAWA伺服參數設定說明:备注: 1、带* 为驱动器必须设定的参数,马达才能正常运转!2、首先设置驱动器的电子齿轮比Pn202 / Pn203和需要马达转一圈回授的脉冲数Pn201 计算方法如下:通常新代控制器所设精度单位1um/Pules (可在系统参数17中设所需精度单位)通常新代控制器所设的倍频数是4 倍(可在系统参数81~100中所设轴卡的倍频)计算公式:电子齿轮比Pn202 / Pn203 = ﹝编码器的脉冲数× 4 ×M﹞÷( 负载转一圈移动量脉冲数×N )M和N是指马达和工作台传动侧的机械齿轮比新代系统参数61~63 = 马达转一圈回授的脉冲数Pn201 = 负载转一圈移动量脉冲数÷控制器内部所设的倍频4****** ex:******当螺杆的节距是10mm 马达选用C 型17比特采用直传连轴器那齿轮比计算如下:负载转一圈移动量脉冲数= 10mm÷1um/Pules =104 PulesM / N = 1 / 1Pn202 / Pn203 = (32768×4×1 ) ÷(104 ×1 ) = 8192 / 625Pn201 = 104 ÷ 4 = 2500 Pules2、设定上表中的驱动器参数,值为后面的设定值;Pn201、Pn202、Pn203为上面公式根据实际情况计算出来的值;Pn100、Pn101、Pn102先不修改数值,为出厂值;3、调整机台的刚性,先进行X、Y、Z 轴的来回运动,通过增大Fn001驱动器参数值,按加1数值增大;通常调节到机台出现震动或有声音后,降回原一级。
安全注意事项使用前(安装、运转、保养、检修),请务必熟读并全部掌握本说明书和其他附属资料,在熟知全部设备知识、安全知识及注意事项后再开始使用。
本说明书中的安全注意事项分为“危险”、“注意”、“强制”、“禁止”四类分别记载。
即使是属于“注意”类的事项,也会因情况不同而产生严重后果,故任何一条“注意”事项都极为重要,请务必严格遵守。
.误操作时有危险,可能发生死亡或重伤事故。
误操作时有危险,可能发生中等程度伤害、轻伤事故或物件损坏。
必须遵守的事项禁止的事项虽然不符合“注意”或“危险”的内容,但为了确保安全和有效的操作,用户也必须遵守的事项,将会在相关处加以叙述。
本书常用词汇定义“MOTOMAN”是安川电机工业机器人的商品名。
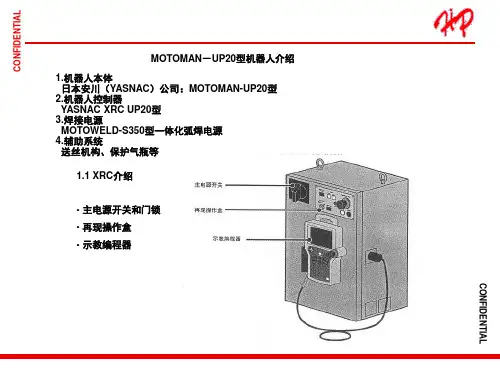
MOTOMAN由机器人本体“机器人”、机器人控制柜“NX100”、“NX100示教编程器”和“供电电缆”构成。
在本书中,这些部分如下表表示。
设 备本 书 表 示 法NX100控制柜NX100NX100示教编程器示教编程器机器人与控制柜间的电缆供电电缆另外,示教编程器的键、按钮、画面的表示方法如下所示:操作步骤的表达方式的定义操作步骤的说明中,“选择 • • • ”表示的操作方法,是把光标移到选择对象上,再按[选择]键。
或者是使用触摸屏直接触摸画面选择项目。
警示牌的说明下列警示牌牌贴在机器人及NX100上。
要完全遵照警示牌执行。
1简介2移动命令2.1命令的登录 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-1 3前进/后退操作4SVSPOTMOV(间隙动作)命令4.1命令的登录 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-1 5空打命令5.1命令的登录 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-25.2磨损检测命令(WEAR). . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-45.3修磨命令(CHIPDRS). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-55.4工件把持命令(WKHLD-ON) . . . . . . . . . . . . . . . . . . . . . . . .5-55.5工件放开命令(WKHLD-OF) . . . . . . . . . . . . . . . . . . . . . . . .5-55.6修磨判断命令(DRSCHK、B3线以后可以使用). . . . .5-65.7修磨条件文件(B3线以后可以使用). . . . . . . . . . . . . . . .5-7 6焊钳更换6.1焊钳更换的设定. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-16.2焊钳更换命令(GUNCHG) . . . . . . . . . . . . . . . . . . . . . . . . .6-36.3手动更换焊钳. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-4 7焊钳轴动作7.1加压动作 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7-17.2打开动作 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7-18焊接结束解除9根据示教位置的数值输入进行编辑 (NC定位装置)9.1位置修正画面的显示. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9-19.2位置的修正. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9-2 10作业原点信号输出设定10.1作业原点的登录. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10-2 11磨损检测基准位置/限定值设定11.1磨损检测基准位置登录. . . . . . . . . . . . . . . . . . . . . . . . . . .11-111.2磨损量限定值设定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11-2 12焊钳特性文件12.1解除加压力 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12-112.2接触速度. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12-3 13主程序的设定13.1主程序的登录. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .13-213.2循环周期的登录. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .13-4 14位置等级(PL)14.1位置等级(PL)的设定 . . . . . . . . . . . . . . . . . . . . . . . . . .14-1 15速度调节功能15.1速度调节功能的设定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15-116输入信号解除16.1输入信号解除步骤. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .16-1 17碰撞检出偏移量17.1操作步骤. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17-117.2说明 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17-217.3功能说明. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17-2 18省电功能(B3线以后可以使用)18.1省电时间的设定. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18-118.2省电种类. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18-1等待主程序的启动信号 . . . . . . . . . . . . . . . . . . . . . . . . . . . .18-1自动运行中的待机状态 . . . . . . . . . . . . . . . . . . . . . . . . . . . .18-31简介本说明书对马自达式样NX100和标准式样NX100的差异部分进行了说明。
安川机器人仿真软件MotoSimEG_VRC2020安装教程
1.双击MotoSimEG_VRC2020软件
2.右击setup.exe。
3.点击以管理员身份运行。
4.点击Install安装。
5.点击NEXT下一步。
6.勾选我同意。
7.点击NEXT下一步。
8.点击complete完整安装。
9.点击NEXT下一步。
10.点击change更改路径(如果不修改安装路径直接点击NEXT 下一步安装即可)。
11.修改安装路径把c盘改为D盘。
12.点击确定。
13.点击Install安装。
14.点击NEXT下一步。
15.勾选我同意。
16.点击NEXT下一步。
17.点击complete完整安装。
18.点击NEXT下一步。
19.点击Install安装。
20.点击Finish完成。
21.右键破解文件Motolok.dll。
22.点击复制。
23.点击复制和替换。
24.打开汉化文件。
25.复制汉化文件中的MotoSimEG_VRC.exe。
26.把汉化文件中的MotoSimEG_VRC.exe粘贴到安装的路径下面
(复制和替换)。
RC软件进行安川机器人弧焊焊接离线编程与虚拟仿真的操作方法,CAM Function是Moto SimEG-VRC软件实现安川机器人离线编程的核心功能,该功能通过在加工零件CAD模型上选取加工路径轨迹特征自动生成机器人加工工艺路径程序。
CAM Function支持的加工工艺包括:弧焊焊接、激光焊接、激光切割、喷涂、抛光、去毛刺以及一般用途等。
在MotoSim EG-VRC软件中使用CAM Function 时,加工工件模型必须是外部导入的模型,使用软件自带的模型创建工具创建的模型,其几何特征不能被CAM功能选取。
MotoSim EG-VRC软件支持导入几乎所有机械设计软件生成的特定格式的模型数据,也支持导入IGES、STEP等中间格式的模型数据。
但是在使用CAM Function时,要尽量使用机械设计软件原始格式模型数据。
使用IGES、STEP等中间格式导入数据时,可能会出现无法检测到加工边缘特征的情况。
除了单台机器人加工的离线编程外,CAM Function还支持多台机器人联动运行加工,以及机器人与变位机、行走轴等外部轴的联动运行加工的离线编程。
机器人弧焊焊接工作站创建首先创建一个简易弧焊焊接机器人工作站,在添加机器人控制器时,机器人的Application选项参数设置为“ARC”,即弧焊焊接工艺应用。
然后为机器人工作站添加简易工装,可以使用MotoSim EG-VRC软件自带的模型创建工具创建,也可以直接导入外部模型。
最后从外部导入焊接零件模型,导入时在CADImport对话框中勾选“Imports the work file for CAM teaching”选项,这样导入模型的几何特征才能被选取,进而实现使用CAM功能进行离线编程。
安川MOTOMAN焊接机器人编程焊接机器人程序编辑一、创建焊接程序[焊缝的示教]。
1、打开控制柜上的电源开关在“ON”状态。
2、将运作模式调到“TEACH”→“示教模式下”1.进入程序编辑状态:1.1.先在主菜单上选择[程序]一览并打开;1.2.在[程序]的主菜单中选择[新建程序]1.3.显示新建程序画面后按[选择]键1.4.显示字符画面后输入程序名现以“TEST”为新建程序名举例说明;1.5.把光标移到字母“T”、“E”“S”、“T”上按[选择]键选中各个字母;1.6.按[回车]键进行登录;1.7.把光标移到“执行”上并确认后,程序“TEST”被登录,并且屏幕画面上显示该程序的初始状态“NOPCEOO”、“ENDCOOL”1.8.编辑机器人要走的轨迹(以机器人焊接直线焊缝为例);2.把机器人移动到离安全位置,周边环境便于作业的位置,输入程序(001);2.1. 握住安全电源开关,接通伺服电源机器人进入可动作状态;2.2.用轴操作键将机器人移动到开始位置(开始位置电影摄制在安全病史和作业准备位置);2.3.按[插补方式]键,把插补方式定为关节插补,输入缓冲显示行中显示关节插补命令,‘MOVJ“→”“MOVJ,,VJ=0.78”2.4.光标放在“00000”处,按[选择]键;2.5.把光标移动到右边的速度“VJ=**”上,按[转换]键+光标“上下”键,设定再现速度,若设定速度为50%时,则画面显示“→MOUVJ VJ=50%”,也可以把光标移到右边的速度,‘VJ=***'上按[选择]键后,可以直接在画面上输入要设定的速度,然后按[回车]键确认。
2.6.按[回车]键,输入程序点(即行号0001)3.决定机器人的作业姿态(作业开始位置的附近)3.1.用轴操作键,使机器人姿态成为作业姿态,然后移到相应的位置;3.2.按[回车]键,输入程序点2(0002);3.3.保持程序点2的姿态不变,移向作业开始位置;3.3.1.保持程序点2的姿态不便,按[坐标]键,设定机器人坐标为直角坐标系,用轴操作键把机器人移到作业开始的位置(在移动前可以按手动速度[高][低]键选择焊枪在示教中移动的速度);3.3.2.光标在行号0002处按[选择]键3.3.3.把光标移动到右边的速度,VJ=***上按[转换]+光标”上下键,设定再现速度,直到设定的速度为所需速度(也可用光标移到速度VJ=***上,按[选择]键后,输入需要的速度值,按[回车]键确认即可);3.3.4.按[回车]键,输入程序点3(行号0003);3.3.4.1.把光标移动到“0003”上,按[引弧]键+[回车]键,输入“引弧”指令(行0004)(“引弧”为“ARCON”)3.3.4.2.把光标移动到行号0003上按[引弧]键,在缓冲显示区显示出“ARCON’”指令以及引弧时的条件;3.3.4.3.对引弧指令中的附加引弧条件根据焊接工件的实际情况进行修改;3.3.4.4.按[回车]键输入“引弧”指令(行号0004);3.3.4.5.指定作业点位置(作业结束位置)3.3.4.6.用轴操作键把机器人移到焊接作业结束位置从作业开始位置到结束位置不必精确沿焊缝运动,为防止不碰撞工件移动轨迹可远离工件;3.3.4.7.按[插补方式]键,插补方式设定为直线插补(MOVL)亦可把光标放在“MOVJ”上,按[选择]键,然后按[转换]+光标上下键可以调整选择插补方式,然后按[回车]键;3.3.4.8.光标在行号0004上按[选择]键;3.3.4.9.把光标移到右边速度“V=***”上,按[转换]+光标上下键设定速度;3.3.4.10.按[回车]键,输入程序点4(行号0005);3.4.按[收弧]键输入(收弧命令为“ARCOF”)3.4.1.把光标移到行号0005上,按[收弧]键,再缓冲显示区显示出‘ARCOF’”指令以收弧时的条件3.4.2.对收弧指令的附加项收弧条件根据焊接工件的实际情况进行修改;3.4.3.按[回车]键输入收弧指令(行0006);3.5.把机器人移到不碰撞工件和夹具的位置;3.5.1.按手动速度[高]键,设定为高速(手动速度[高]键只是显示示教时的速度,再现中以定义的速度运行);3.5.2.用轴操作键把机器人移到不碰撞夹具的位置;3.5.3.按[插补方式]键,设定插补方式为关节插补(MOVJ);3.5.4.光标在行号0006上,按[选择]键→MOVJ VJ=15;3.5.5.把光标移到右边的速度VJ=15上,按[转换]+上下键,设定速度(也可按[选择]键后,直接输入要设定的速度,再按[回车]键登录速度;3.5.6.按[回车]键,输入程序点(行0007)3.6.把机器人移到开始位置上;3.6.1把光标返回到0001上,按[前进]键把机器人移动到程序点1上;3.6.2.再把光标移到行号0007上,按[回车]键,输入程序点8(行0008)二、确认所设定的程序中的轨迹操作;1、把光标移到程序点0001上;2、按手动速度[高][低]键设定速度键;3、按[前进]键,通过机器人动作确认各程序点,每按一次[前进]键机器人移动到一个程序点;4、亦可把光标移到程序点行0001上,按[连锁]+[试运行]键,机器人连续再现所有程序点,一个循环后停止运作;三、在焊接中,往往有时设定好的程序有许多与实际生产不适合,所以需要进行修该程序(包括又插入程序点、删除程序点、修改程序点的位置数据等);1、插入程序点;1.1.把程序内容打开(以在程序点3、4、之间插入为列);1.2.按[前进]键,把机器人移动到程序点3上;1.3.用轴操作键把机器人移到想插入位置;1.4.按[插入]键;1.5.按[回车]键完成程序点插入,所插入程序点行号为(0004),2、删除程序点(以3、4位列);2.1.按[前进]键,把机器人移到要删除的程序点3上;2.2.按[删除]键;2.3.按[回车]键,程序点3被删除;3、修改程序点的位置数据(以程序点3位列);3.1.把光标移到程序点3上;3.2.按[前进]键,使机器人回到程序点3上;3.3.用轴操作键把机器人移到修改后的位置;3.4.按[修改]键;3.5.按[回车]键,程序点的位置数据被修改;4、设定焊接条件:(ARCON ARCOF ARCOF);4.1.先打开程序内容;4.2.把光标移到要进行焊接作业的程序点的前一个行号上;4.3.按[引弧]键或[命令一览]键中选择程序[作业]中选择ARCON命令,缓冲显示区有ARCON指令及附加条件;4.4.按[回车]键‘引弧“命令自动在程序中生成;4.5.设定引弧条件的方式有三种(一、把各种条件作为附加项进行设定的方法,二、使用引弧文件的方法ASF#(X),三、不带附加项)5.用附加项设定焊接条件的方法;5.1.在命令区选择ARCON指令,(缓冲区显示ARCON指令);5.2.按[选择]键(显示详细编辑画面,选择“未使用”;5.3.选择“未使用”(显示选择对话框);5.4.选择“AC=**(在ARCON命令的附加项中已设定引弧条件时,显示详细编辑画面);5.5.输入焊接条件(设定每个焊接条件);5.6.按[回车]键(设定的内容显示在输入缓冲区中);5.7.按[回车]键设定的内容登录到程序中;5.8.不想登录设定的程序时,按[清除]键,回到程序内容画面;6.使用引弧条件文件;6.1.在命令区选择ARCON命令,(输入缓冲行显示ARCON命令);6.2.按[选择]键,(显示详细编辑画面);6.3.选择“未使用‘(显示选择对话框);6.4.选择ASF#() (显示详细编辑画面);6.5.设定文件号(指定文件号1~64把光标移到文件号上,按[选择]键→用数值输入文件号按[回车]键;6.6.按[回车]键,(设定的内容显示在输入行中);6.7.按[回车]键,(设定的内容登录到程序中);6.8.不想登录设定的文件内容时,按[清除]键,回到程序内容画面;7.没有附加项的方法;7.1.选择命令区ARCON命令(输入缓冲行显示ARCON的命令);7.2.按[选择]键(显示详细编辑画面);7.3.选择ASF#() (显示选择对话框);7.4.选择‘未使用“;7.5.选择[回车]键,设定的内容在输入缓冲行中;7.6.按[回车]键,设定的内容登录到程序中;7.7.不想登录设定的内容时,按[清除]键,回到程序内容画面;四、分别设定焊接条件(电流、电压命令);1.登录AECSET命令;1.1.把光标移到地址区;1.2.按[命令一览]键(显示命令一览对话框);1.3.选择“作业”;1.4.选择ARCSET命令(输入缓冲显示ARCSET命令);1.5.按[选择]键(显示详细编辑画面);1.6.设定焊接条件(把光标移动到设定的项目上,按[选择]键,用数值键输入焊接条件,再按[回车]键,追加附加项时,在选择对话框中选择“未使用”删除附加项时也同样把光标移到想删除的附加项上,按[选择]键选择“未使用”;1.7.按[回车]键(所设定的内容显示在缓冲区行);1.8.按[回车]键(设定的内容被输入到程序中,当不想登录设定的内容时,按[清除]键,回到程序内容画面);2.设定熄弧条件(填弧坑处理);1.按[熄弧]键,输入熄弧命令(利用[命令一览]键进行AECOF命令登录时,选择命令中的“作业”;2.登录ARCOF方法;2.1.按[熄弧]键2.2.按[回车]键;2.3.设定熄弧条件(ARCOF有三种方法;一、把各种条件作为附加项进行设定;二、使用熄弧条件方法;三、不带附加项);3.各条件设定为附加项的方法;3.1.选择命令区的ARCOF命令(输入缓冲区显示ARCOF命令);3.2.按[选择]键(显示详细编辑画面);3.3.选择“未使用”(显示选择对话框);3.4.选择“AC=”;3.5.输入焊接收弧条件(设定各个焊接条件);3.6.按[回车]键(输入缓冲区行显示设定的条件);3.7.按[回车]键(设定的内容被登录到程序中);3.8.不想登录设定的内容时,按[清除]键,回到程序内容画面;4.使用熄弧条件方法;4.1.选择命令区的ARCOF命令(输入缓冲行显示ARCOF命令);4.2.按[选择]键(显示详细的编辑画面);4.3.选择“未使用”(显示选择对话框);4.4.选择“AEF#();4.5.设定文件号(1~12把光标移到文件号上,按[选择]键确定用数值键输入文件号,按[回车]键;4.6.按[回车]键(设定的内容显示在输入缓冲行中);4.7.按[回车]键(设定的内容被输入到程序中);4.8.不想登录设定的内容时,按[清除]键,回到程序内容画面);五、不带附加项的内容;1.选择命令区的ARCOF命令(输入缓冲行显示ARCOF命令);2.按[选择]键(显示详细编辑画面);3.选择AEF#()或AC=*** (显示选择对话框);4.选择‘未使用’;5.按[回车]键(输入缓冲行显示设定的内容);6.按[回车]键(设定的内容被输入到程序中);7.不想登录设定的内容时,按[清除]键,回到程序内容画面;8.确认动作(检查运行);把所设定的程序轨迹进行一次模拟实验,在再现模式中,调出‘检查运行’一行进行轨迹确认;9.在程序的再现画面按[区域]键;10.选择[实用]工具栏;11.选择设定的特殊运行户(显示特殊运行画面);12.选择‘检车运行’(每次按[选择]键有效、无效、交替交换;13.选择‘有效’字样;14.打开[伺服电源]键;15.把光标移到程序点1上按下[START]键,机器人自行检查;16.焊接条件的微调;六、焊接条件的微调;1、进行焊接利用已经调整好的程序;2、从焊缝外观进行焊接条件的微调(根据焊缝成型情况对焊接电流、电压等进行调整);七、生产;1、把运作模式设定在‘再现’模式;2、选择主菜单的[程序]一行中子菜单[选择程序]并打开;3、把光标移到要选择用于焊接的程序中;4、进行程序轨迹检查运行;5、当检查完后,把光标移到‘0001’上,运作模式设定为‘再现模式’按下‘START’进行焊接。
安川机器人操作手册简易百富非凡XRC機器人操作要領入門一、開機程序打開控制箱主電源開關(NO / OFF)切至 ON位置等待掃氣完成,約3-5分鐘按下SERVO ON接通鍵→按下伺服電源啟動,燈號亮起,接通機器人伺服馬達電源,即可操作。
二、關機程序當SERVO ON ,指示燈燈號亮著時,需等待於ROBOT及滑台靜止狀態下,按下緊停鈕SERVO ON ,燈號熄滅,切斷機器人伺服馬達電源控制箱電源(NO / OFF)切至 OFF。
三、再生單次執行(用於程式教示完,之試車用)按下 TEACH (控制盒之教導鍵)教示盤上(區域切換鍵),游標移至最上排選擇第二項之管理,再按下 (SELECT) 選擇輸入密碼8個9,再按下 ENTER回車/輸入選擇第九項工具設定→操作條件→預約啟動(禁止/許可)選擇禁止,回到主目錄,選擇第一項程式→選擇需試車之程式(例如R-032)按下控制盒上之 PALY 鍵,進入在現模式。
將供料機切至自動,按下啟動鍵,送滑台至前定位,按下START , ROBOT 便會自動執行整個程式動作(注意,執行中須隨時準備押下警停鍵,以免程式中之路徑不正確,造成撞車)四、連續執行(用於程式教示完,量產用)1、確認工件種別按下TEACH →按下教示盤上之游標移至最上排選擇第二項之管理,再按下 (SELECT) 選擇輸入8個9,再按下 ENTER回車/輸入選擇第九大項工具設置→操作條件→預約啟動(禁止/許可)選擇(禁止),選擇再回到主目錄第一項,選擇啟動→程序名→選擇程式名稱。
2、執行再生到主目錄第一項,選擇啟動→程序名→選擇程式名稱按下控制盒上之 PLAY鍵將供料機切換至自動模式下按下供料機啟動鍵,供料機旋轉至定位,機器人便會自動執行整個程式動作。
五、教示之程式試運轉(程式教示完之手動再生)按下控制盒上之 TEACH選擇第一大項主菜單,選擇程式選擇要試運轉之程式,(例如:R-032)將供料機切換至自動模式,以自動啟動鍵,送供料機轉至前定位,同時按下教示盤上之 INTER LOCK 及 TEST START ,ROBOT 便會開始執行程式,放開即停止,(完全執行整個程式內容)六、程式撰寫按下控制盒上之SERVO ON ,燈號亮起按下控制盒上之 TEACH教示選擇主菜單上之程式,選擇新建程序輸入程式名稱,(例如:R-032)按下 ENTER,移動游標至最下行,選擇執行0000 NOP0001 MOVJ VJ=100 需有第一點製作,按下ENTER,(程式原點)0002 MOVL V=800 路徑之第二點0003 MOVL V=800 路徑第三點0004 MOVL V=800 路徑第四點0005 MOVL V=800 路徑第五點:↓0010 MOVL V=800 路徑第十點0011 MOVJ VJ=100 回到程式原點12 END註:程式選寫前,先決定執行者教示時ROBOT之運動模式押下教示盤COORD座標系選擇關節直角工具使用者↓↓↓↓各軸滑台工件角度自設↓程式選寫時之路徑決定修改路徑0000 NOP0001 MOVJ VJ=1000002 MOVL V=800 將游標移至行號0003 MOVL V=800 移動ROBOT至欲修改之位置押下MODIFY(變更鍵)押下ENTER (輸入鍵)修改速度0000 NOP0001 MOVJ VJ=1000002 MOVL V=800 將游標移至命令上0003 MOVL V=800 押下選擇MOVL V=800將游標移至速度上押下選擇鍵 V=輸入欲修之速度 V=1000押下ENTER確認 MOVL V=1000確認後再押下ENTER0000 NOP0001 MOVJ VJ=1000002 MOVL V=10000003 MOVL V=800插入路徑0000 NOP0001 MOVJ VJ=1000002 MOVL V=800(P1) 將ROBOT移至欲增加的點上0003 MOVL V=800 教示新的位置押下 INSERT (插入鍵)再押下 ENTER(輸入鍵)0000 NOP0001 MOVJ VJ=1000002 MOVL V=800(P1)新插入之路徑會增加在0003 MOVL V=800 (P2) 游標選擇之行號之下0004 MOVL V=800刪除路徑0000 NOP0001 MOVJ VJ=1000002 MOVL V=800(P1)將游標移至欲刪除之行號上0003 MOVL V=800(P2)押下 DELETE(刪除鍵)0004 MOVL V=800 再押 ENTER (輸入/回車鍵)0000 NOP0001 MOVJ VJ=1000002 MOVL V=800(P2)0003 MOVL V=800CALL副程式0000 NOP0001 MOVJ VJ=1000002 MOVL V=800 將游標選擇行號,按下 INFORM LIST 0003 MOVL V=800 (指令一覽表)按選擇鍵: CALL:JOB(程式)選擇JOB↓0010 MOVL V=800 選擇須要之副程式【例:(AT-ON)】0011 MOVJ VJ=100 押下選擇 CALL:(AT-ON)0012 END 押下 INSERT(插入鍵)押下 ENTER▼0000 NOP0001 MOVJ VJ=1000002 MOVL V=800 (副程式會自動加在指定行號之下)0003 CALL :(AT-ON)0003 MOVL V=800:↓0010 MOVL V=8000011 MOVJ VJ=1000012 END 行號自動加一範例:(供料機)0000 NOP 需先選擇(機器人移動座標系)方式及程式路徑(運動速度與方式)。