流体传动与控制课后作业答案
- 格式:pdf
- 大小:5.23 MB
- 文档页数:25
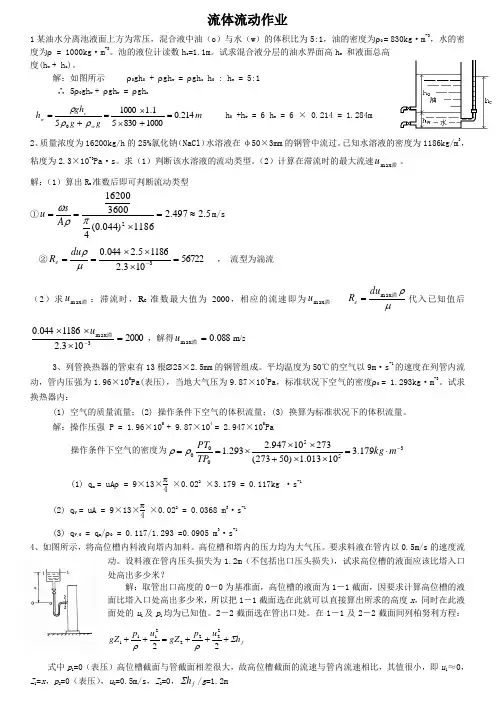
流体流动作业1某油水分离池液面上方为常压,混合液中油(o )与水(w )的体积比为5:1,油的密度为ρ0 = 830kg·m -3,水的密度为ρ = 1000kg·m -3。
池的液位计读数h c =1.1m 。
试求混合液分层的油水界面高h w 和液面总高度(h w + h o )。
解:如图所示 ρ0gh 0 + ρgh w = ρgh c h 0 : h w = 5:1 ∴ 5ρ0gh w + ρgh w = ρgh c m g g gh h w c w 214.0100083051.1100050=+⨯⨯=+=ρρρ h 0 +h w = 6 h w = 6 × 0.214 = 1.284m2、质量浓度为16200kg/h 的25%氯化钠(NaCl )水溶液在φ50×3mm 的钢管中流过。
已知水溶液的密度为1186kg/m 3,粘度为2.3×10-3Pa·s。
求(1)判断该水溶液的流动类型。
(2)计算在滞流时的最大流速滞m ax u 。
解:(1)算出R e 准数后即可判断流动类型①5.2497.21186)044.0(43600162002≈=⨯==πρωA su m/s ②56722103.211865.2044.03=⨯⨯⨯==-μρdu R e , 流型为湍流 (2)求滞m ax u :滞流时,R e 准数最大值为2000,相应的流速即为滞m ax u μρ滞max du R e =代入已知值后2000103.21186044.03max =⨯⨯⨯-滞u ,解得088.0max =滞u m/s3、列管换热器的管束有13根∅25×2.5mm 的钢管组成。
平均温度为50℃的空气以9m·s -1的速度在列管内流动,管内压强为1.96×105Pa(表压),当地大气压为9.87×104Pa ,标准状况下空气的密度ρ0 = 1.293kg·m -3。
流体力学与液压传动(专科)作业答案一、判断( 每题参考分值2.5分 )1、液压缸差动连接时,液压缸产生的作用力比非差动连接时的作用力大。
A. 正确B. 错误答案:【B】2、在研究流动液体时,把假设既无粘性又不可压缩的液体称为理想流体。
A. 正确B. 错误答案:【A】3、轴向柱塞泵是通过改变斜盘的角度来实现变量的。
A. 正确B. 错误答案:【A】4、通过节流阀的流量与节流阀的通流截面积成正比,与阀两端的压力差大小无关A. 正确B. 错误答案:【B】5、容积调速回路中,变量泵-定量马达的调速方式为恒转矩调节;定量泵-变量马达的调节为恒功率调节。
A. 正确B. 错误答案:【A】6、定值减压阀为出口压力控制,阀口常开,先导阀弹簧腔的泄漏油必须通油箱。
A. 正确B. 错误答案:【A】7、液体在管道中存在两种流动状态,层流时粘性力起主导作用,紊流时惯性力起主导作用,液体的流动状态可用雷诺数来判断。
A. 正确答案:【A】8、液压缸差动连接时,能比其它连接方式产生更大的推力。
A. 正确B. 错误答案:【B】9、作用于活塞上的推力越大,活塞运动速度越快。
A. 正确B. 错误答案:【B】10、液压泵的实际流量比理论流量小;而液压马达实际流量比理论流量大。
A. 正确B. 错误答案:【A】11、标号为N32的液压油是指这种油在温度为400C时,其运动粘度的平均值为32mm2/s。
A. 正确B. 错误答案:【A】12、定值减压阀为出口压力控制,阀口常开,先导阀弹簧腔的泄漏油必须通油箱。
A. 正确B. 错误答案:【A】13、液流流经薄壁小孔的流量与小孔通流面积的一次方成正比,与压力差的1/2次方成正比。
通过小孔的流量对温度不敏感,因此薄壁小孔常用作可调节流阀。
A. 正确B. 错误答案:【A】14、由于流体具有粘性,液流在管道中流动需要损耗一部分能量,它由沿程压力损失和局部压力损失两部分组成。
B. 错误答案:【A】15、调压回路的功用是使液压系统整体或某一部分的压力等于或不超过某个限定值。
2014年9月份考试流体传动与控制第一次作业一、单项选择题(本大题共40分,共 20 小题,每小题 2 分)1. 液压系统的动力元件是()。
A. 电动机 B. 液压泵 C. 液压缸 D. 液压阀2. 能输出恒功率的容积调速回路是()。
A. 变量泵---变量马达回路 B. 定量泵---变量马达 C. 变量泵---定量马达 D. 目前还没有3. 容积调速系统的速度刚度比采用调速阀节流调速系统的速度刚度()。
A. 高B. 低4. 在液压系统图中,与三位阀连接的油路一般应画在换向阀符号的()位置上。
A. 左格 B. 右格 C. 中格5. 液体静压力随液体深度h的增加而()地增加。
A. 呈曲线性B. 呈线性6. 溶解在油液的空气含量增加时,油液的等效体积弹性模量()。
A. 增大B. 减小C. 基本不变7. ()管多用于两个相对运动部件之间的连接,还能吸收部分液压冲击。
A. 铜管 B. 钢管 C. 橡胶软管 D. 塑料管8. 电液比例阀电磁力马达的弹簧在理论上的刚度是()。
A. 很小B. 一般C. 无限大9. 流量连续性方程是()在流体力学中的表达形式。
A. 能量守恒定律B. 动量定理C. 质量守恒定律D. 其他10. 雷诺数R e=p v D H/μ值比较大时说明惯性力起主导作用()。
A. 层流状态B. 紊流状态11. 为使三位四通阀在中位工作时能使液压缸闭锁,应采用()型阀A. “O”型阀B. “P”型阀C. “Y”型阀12. 设计合理的液压泵的吸油管应该比压油管()。
A. 长些B. 粗些C. 细些13. 外啮合齿轮泵的特点有()。
A. 结构紧凑,流量调节方便 B. 通常采用减小进油口的方法来降低径向不平衡力 C. 噪音较小,输油量均匀,体积小,重量轻 D. 价格低廉,工作可靠,自吸能力弱,多用于低压系统14. 与节流阀相比较,调速阀的显著特点是()。
A. 流量稳定性好 B. 结构简单,成本低 C. 调节范围大 D. 最小压差的限制较小15. 压力控制回路包括()。
流体传动与控制第一章绪论1、液压系统中的压力取决于,执行元件的运动速度取决于。
答案:负载;流量2、液压传动系统所依据的理论是。
答案:帕斯卡定律3、通过对液体的压力、流量、方向的控制,来实现对执行元件的运动速度、方向、作用力等的控制的元件,用以实现过载保护、程序控制的元件称做。
答案:控制元件4、能源装置答案:能源装置是将机械能转换成液压能的能量转换装置。
5、执行装置答案:执行装置是把液压能转换成机械能的能量转换装置。
常有做直线运动的液压缸和实现回转运动的液压马达。
6、如何绘制常用液压元件的图形符号?答案:7、如何绘制常用液压元件的图形符号?8、如何选用液压转动的介质?答案:1、合适的粘度,较好的粘温特性。
2、润滑性能好。
3、质地纯净,杂质少。
4、对金属和密封件有良好的相容性。
5、对热、氧化、水解和剪切都有良好的稳定性。
6、抗泡沫性好,抗乳化性好,腐蚀性小,防锈性好。
7、体积膨胀系数小,比热容大。
8、流动点和凝固点低,闪点(明火能使油面上油蒸气闪燃,但油本身不燃烧时的温度)和燃点高。
9、对人体无害,成本低。
9、液压系统工作介质的品种以其和后面的组成,代号为L是石油产品的总分类号,H表示液压系统用的,数字表示该工作介质的等级。
答案:代号;数字;工作介质;粘度10、如何选用液压传动介质?答案:选用液压传动的介质,要考虑设备的性能、使用环境等综合因素。
如设备工作在高温环境下,就应选用抗燃性能好的介质。
温度高时选高粘度油,温度低时选用低粘度油。
其次,还要考虑工作压力、执行元件的速度等。
一般情况下,压力愈高,选用油液的粘度愈高;执行元件的速度愈高,选用油液的粘度愈低。
11、进入工作介质的固体污染物有四个根源:、、和。
答案:已被污染的新油;残留污染;侵入污染;内部生成污染12、污染度测定方法有和两种。
答案:测重法;颗粒计数法第二章流体力学基础1、液体静压力P答案:液体内某点处单位面积△A与所受到的法向力△F之比,称为压力p(静压力),即:2、液体静压力的方向可能作用在内法线方向上。
第一章绪论以液体为工作介质,传递能量和进行控制的叫液体传动,包括液力传动和液压传动。
液压传动是用密封的在系统中的液体为介质,把液压能转换为机械能。
只利用液体的压力能传动。
液压传动的工作原理:液体具有两个重要特性:1.液体几乎不可压缩;2.密闭容器中静止液体压力以同样大小向各个方向传递。
液压系统的工作特性:(1)液压传动是靠着运动着的液体压力能来传递力的;(2)液压传动系统是一种能量转换系统;(3)液压传动中的油液是在受调节控制的状态下进行工作的;(4)液压传动系统必须满足主机在力和速度等方面提出的要求;系统组成:1.传递介质 2.动力元件 3.执行元件 4.控制元件 5.辅助元件第二章液体流体力学基础名词解释:可压缩性、黏性、理想流体、实际流体、稳定流动和非稳定流动、层流和稳流、雷诺数 层流:液体中质点沿管道做直线运动而没有横向运动。
稳流:液体中质点除了沿管道轴线运动外,还有横向运动,成杂乱无章的状态。
工作液三大类:矿物油,浮化液,合成型液。
液压油液的黏度有几种表示方法?它们各用什么符号表示?它们又各用什么单位? 答:(1)动力黏度(绝对黏度):用μ表示,国际单位为:Pa •s (帕•秒);工程单位:P (泊)或cP (厘泊)。
(2)运动黏度: 用ν表示,法定单位为s m 2,工程制的单位为St (沲,s cm 2),cSt (厘沲)。
(3)相对黏度:中国、德国、前苏联等用恩氏黏度ºE ,美国采用赛氏黏度SSU ,英国采用雷氏黏度R ,单位均为秒。
黏度的定义:油液在流动时产生内摩擦力的特性。
压力、温度对液体黏性的影响:对液压油而言,黏度随压力的增大而增大,但压力对液体黏度影响小,在压力不高且变化不大时,这种影响可以忽略。
>=20MPa 变化较大,需要考虑液体黏度随温度升高而减小。
液压油四项基本功能:(1)传递运动和力;(2)润滑液压元件和运动元件;(3)散发热量;(4)密封液压元件对偶摩擦中的间隙。
《流体传动与控制》在线作业中位机能是型的换向阀在中位时可实现系统卸荷。
()A:OB:PC:MD:Y正确选项:C伯努利方程是在流体力学中的表达形式。
A:能量守恒定律B:动量定理C:质量守恒定律D:其他正确选项:A减压阀的出油口被堵住后,减压阀处于()。
A:处于非减压状态B:处于减压状态C:处于何种工作状态由阀入口处压力决定D:阀口关闭状态正确选项:C气体状态变化的()过程中,无内能变化,加入系统的热量全部变成气体所做的功。
A:等容过程B:等压过程C:等温过程D:绝热过程正确选项:C变量轴向柱塞泵排量的改变是通过调整斜盘的大小来实现的。
()A:角度B:方向C:A和B都不是D:A和B都是正确选项:A有两个调整压力分别为5MPa和10MPa的溢流阀并联在液压泵的出口,则泵的出口压力为()。
A:5MPaB:10MPaC:15MPaD:20MPa正确选项:A在负载较大,并有快速和慢速运动行程要求的机械设备液压系统中,可使用以下哪种液压泵?A:齿轮泵B:螺杆泵C:轴向柱塞泵D:限压式变量叶片泵正确选项:C在没有泄漏的情况下,根据泵的几何尺寸计算得到的流量称为()。
A:额定流量B:实际流量C:理论流量D:瞬时流量正确选项:C大流量的液压系统中,主换向阀应采用()换向阀。
A:手动B:电磁C:电液D:均可正确选项:C流量连续性方程是在流体力学中的表达形式。
()A:能量守恒定律B:动量定理C:质量守恒定律D:其他正确选项:C能形成差动连接的液压缸是。
A:单杆液压缸B:双杆液压缸C:柱塞式液压缸D:均可正确选项:A在液压系统中,可作背压阀。
A:溢流阀B:减压阀C:液控顺序阀D:液控单向阀。
第一章 流体流动与输送设备1. 燃烧重油所得的燃烧气,经分析知其中含%,%,N 276%,H 2O8%(体积%),试求此混合气体在温度500℃、压力时的密度。
解:混合气体平均摩尔质量molkg M y M i i m /1086.281808.02876.032075.044085.03-⨯=⨯+⨯+⨯+⨯=∑=∴ 混合密度333/455.0)500273(31.81086.28103.101m kg RT pM m m =+⨯⨯⨯⨯==-ρ2.已知20℃下水和乙醇的密度分别为998.2 kg/m 3和789kg/m 3,试计算50%(质量%)乙醇水溶液的密度。
又知其实测值为935 kg/m 3,计算相对误差。
解:乙醇水溶液的混合密度7895.02.9985.012211+=+=ρρρa a m3/36.881m kg m =∴ρ相对误差:%74.5%10093536.8811%100=⨯⎪⎭⎫⎝⎛-=⨯-实实m m m ρρρ3.在大气压力为的地区,某真空蒸馏塔塔顶的真空表读数为85kPa 。
若在大气压力为90 kPa 的地区,仍使该塔塔顶在相同的绝压下操作,则此时真空表的读数应为多少解:''真真绝p p p p p a a -=-=∴kPa p p p p a a 7.73)853.101(90)(''=--=--=真真4.如附图所示,密闭容器中存有密度为900 kg/m 3的液体。
容器上方的压力表读数为42kPa ,又在液面下装一压力表,表中心线在测压口以上0.55m ,其读数为58 kPa 。
试计算液面到下方测压口的距离。
解:液面下测压口处压力gh p z g p p ρρ+=∆+=10m h g p p g p gh p z 36.255.081.990010)4258(30101=+⨯⨯-=+-=-+=∆∴ρρρ5. 如附图所示,敞口容器内盛有不互溶的油和水,油层和水层的厚度分别为700mm 和600mm 。
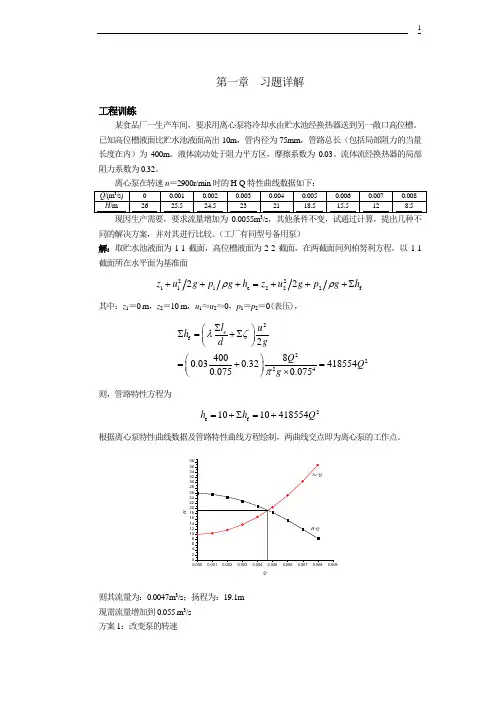
第一章 习题详解工程训练某食品厂一生产车间,要求用离心泵将冷却水由贮水池经换热器送到另一敞口高位槽。
已知高位槽液面比贮水池液面高出10m ,管内径为75mm ,管路总长(包括局部阻力的当量长度在内)为400m 。
液体流动处于阻力平方区,摩擦系数为0.03。
流体流经换热器的局部阻力系数为0.32。
离心泵在转速n =2900r/min 时的H-Q 特性曲线数据如下:现因生产需要,要求流量增加为0.0055m /s ,其他条件不变,试通过计算,提出几种不同的解决方案,并对其进行比较。
(工厂有同型号备用泵)解:取贮水池液面为1-1截面,高位槽液面为2-2截面,在两截面间列柏努利方程。
以1-1截面所在水平面为基准面22111e 222f 2z u g p g h z u g p g h ρρ+++=+++∑其中:z 1=0 m ,z 2=10 m ,u 1≈u 2≈0,p 1=p 2=0(表压),2f 2224240080.030.324185540.0750.075e l uh d gQ Q g λζπ∑⎛⎫∑=+∑ ⎪⎝⎭⎛⎫=+= ⎪⨯⎝⎭则,管路特性方程为2e f 1010418554h h Q =+∑=+根据离心泵特性曲线数据及管路特性曲线方程绘制,两曲线交点即为离心泵的工作点。
HQ则其流量为:0.0047m 3/s ;扬程为:19.1m 现需流量增加到0.055 m 3/s 方案1:改变泵的转速2, Q n H n Q n H n ''''⎛⎫== ⎪⎝⎭ 则 0.00550.00472900'3393 r /minn n '==此时扬程为:26.2 m 。
方案2:根据生产任务要求,购置新泵。
方案3:两台泵串联HQ则其流量为:0.0065m 3/s ;扬程为:27.5m 。
方案4:两台泵并联HQ则其流量为:0.0056m 3/s ;扬程为:23.5m 。
第一章 流体及其主要物理性质1-1.轻柴油在温度15ºC 时相对密度为0.83,求它的密度和重度。
解:4ºC 时所以,33/8134980083.083.0/830100083.083.0mN m kg =⨯===⨯==水水γγρρ1-2.甘油在温度0ºC 时密度为1.26g/cm3,求以国际单位表示的密度和重度。
333/123488.91260/1260/26.1m Ng m kg cm g =⨯==⇒==ργρ 1-3.水的体积弹性系数为1.96×109N/m 2,问压强改变多少时,它的体积相对压缩1%?MPa Pa E E VVVV p p6.191096.101.07=⨯==∆=∆=∆β 1-4.容积4m 3的水,温度不变,当压强增加105N/m 2时容积减少1000cm 3,求该水的体积压缩系数βp 和体积弹性系数E 。
解:1956105.2104101000---⨯=⨯--=∆∆-=Pa p V V p β Pa E p89104105.211⨯=⨯==-β 1-5. 用200L 汽油桶装相对密度为0.70的汽油,罐装时液面上压强为1个大气压,封闭后由于温度变化升高了20ºC ,此时汽油的蒸气压为0.18大气压。
若汽油的膨胀系数为0.0006ºC -1,弹性系数为14000kg/cm 2。
试计算由于压力及温度变化所增减的体积?问灌桶时每桶最多不超过多少公斤为宜?解:E =E ’·g =14000×9.8×104PaΔp =0.18atdp pVdT T V dV ∂∂+∂∂=00V TVT V V T T ββ=∂∂⇒∂∂=00V p V p V V p p ββ-=∂∂⇒∂∂-= 所以,dp V dT V dp pVdT T V dV p T 00ββ-=∂∂+∂∂=从初始状态积分到最终状态得:LL L V p p E V T T V V dpV dT V dV T p pp T T T VV 4.21057.24.2200108.914000108.918.020*******.0)(1)(34400000000≈⨯-=⨯⨯⨯⨯⨯-⨯⨯=---=--=-⎰⎰⎰βββ即()kg V V M 32.13810004.220010007.0=-⨯⨯=∆-=ρ另解:设灌桶时每桶最多不超过V 升,则200=++p t dV dV VV dt V dV t t 2000061.0⨯=⋅⋅=βV dp V dV p p 18.0140001⨯-=⋅⋅-=β(1大气压=1Kg/cm 2) V =197.6升 dV t =2.41升 dV p =2.52×10-3升G =0.1976×700=138Kg =1352.4N 1-6.石油相对密度0.9,粘度28cP ,求运动粘度为多少m 2/s?()c S t St s m 3131.0/101.310009.01028253==⨯=⨯⨯==--ρμν 1-7.相对密度0.89的石油,温度20ºC 时的运动粘度为40cSt ,求动力粘度为多少? 解:89.0==水ρρd ν=40cSt =0.4St =0.4×10-4m 2/sμ=νρ=0.4×10-4×890=3.56×10-2 Pa ·s 1-8.图示一平板在油面上作水平运动,已知运动速度u=1m/s ,板与固定边界的距离δ=1,油的动力粘度μ=1.147Pa ·s ,由平板所带动的油层的运动速度呈直线分布,求作用在平板单位面积上的粘性阻力为多少?解:233/10147.11011147.1m N dy du ⨯=⨯⨯==-μτ 1-9.如图所示活塞油缸,其直径D =12cm ,活塞直径d =11.96cm ,活塞长度L =14cm ,油的μ=0.65P ,当活塞移动速度为0.5m/s 时,试求拉回活塞所需的力F=?解:A =πdL , μ=0.65P =0.065 Pa ·s , Δu =0.5m/s , Δy=(D-d)/2()N dy du AF 55.821096.11125.010141096.1114.3065.0222=⨯-⨯⨯⨯⨯⨯⨯==---μ第二章 流体静力学2-1. 如图所示的U 形管中装有水银与水,试求:(1)A 、C 两点的绝对压力及表压各为多少? (2)A 、B 两点的高度差为多少?解:① p A 表=γh 水=0.3mH 2O =0.03at =0.3×9800Pa =2940Pap A 绝=p a + p A 表=(10+0.3)mH 2O =1.03at =10.3×9800Pa=100940Pap C 表=γhgh hg + p A 表=0.1×13.6m H 2O+0.3mH 2O =1.66mH 2O =0.166at=1.66×9800Pa =16268Pap C 绝=p a + p C 表=(10+1.66)mH 2O =11.66 mH 2O =1.166at =11.66×9800Pa =114268Pa ② 30c mH 2O =13.6h cmH 2O ⇒h =30/13.6cm=2.2cm题2-2 题2-32-2.水银压力计装置如图。
试题库三、判断题1.液压缸活塞运动速度只取决于输入流量的大小,与压力无关。
(○)2.液体流动时,其流量连续性方程是能量守恒定律在流体力学中的一种表达形式。
(×)3.理想流体伯努力方程的物理意义是:在管内作稳定流动的理想流体,在任一截面上的压力能、势能和动能可以互相转换,但其总和不变。
(○)4.雷诺数是判断层流和紊流的判据。
(×)5.薄壁小孔因其通流量与油液的粘度无关,即对油温的变化不敏感,因此,常用作调节流量的节流器。
(○)6.流经缝隙的流量随缝隙值的增加而成倍增加。
(×)7.流量可改变的液压泵称为变量泵。
(×)8.定量泵是指输出流量不随泵的输出压力改变的泵。
(×)9.当液压泵的进、出口压力差为零时,泵输出的流量即为理论流量。
(○)10.配流轴式径向柱塞泵的排量q与定子相对转子的偏心成正比,改变偏心即可改变排量。
(○)11.双作用叶片泵因两个吸油窗口、两个压油窗口是对称布置,因此作用在转子和定子上的液压径向力平衡,轴承承受径向力小、寿命长。
(○)12.双作用叶片泵的转子叶片槽根部全部通压力油是为了保证叶片紧贴定子内环。
(×)13.液压泵产生困油现象的充分且必要的条件是:存在闭死容积且容积大小发生变化。
(○)14.齿轮泵多采用变位齿轮是为了减小齿轮重合度,消除困油现象。
(×)15.液压马达与液压泵从能量转换观点上看是互逆的,因此所有的液压泵均可以用来做马达使用。
(×)16.因存在泄漏,因此输入液压马达的实际流量大于其理论流量,而液压泵的实际输出流量小于其理论流量。
(○)17.双活塞杆液压缸又称为双作用液压缸,单活塞杆液压缸又称为单作用液压缸。
(×)18.滑阀为间隙密封,锥阀为线密封,后者不仅密封性能好而且开启时无死区。
(○)19.节流阀和调速阀都是用来调节流量及稳定流量的流量控制阀。
(×)20.单向阀可以用来作背压阀。
《工程流体力学》课后习题答案孔珑第四版第2章流体及其物理性质 (4)2-1 (4)2-3 (4)2-4 (6)2-5 (6)2-6 (6)2-7 (7)2-8 (7)2-9 (8)2-11 (8)2-12 (9)2-13 (9)2-14 (10)2-15 (10)2-16 (11)第3章流体静力学 (12)3-1 (12)3-2 (12)3-3 (13)3-5 (13)3-6 (14)3-9 (14)3-10 (15)3-21 (18)3-22 (19)3-23 (20)3-25 (20)3-27 (20)第4章流体运动学及动力学基础 (22)4-2 (22)4-5 (22)4-6 (23)4-8 (23)4-11 (24)4-12 (24)4-14 (25)4-22 (25)4-24 (26)4-26 (27)第6章作业 (28)6-1 (28)6-3 (28)6-7 (29)6-10 (29)6-11 (29)6-12 (30)6-17 (31)第2章流体及其物理性质2-1已知某种物质的密度ρ=2.94g/cm3,试求它的相对密度d。
【2.94】解:ρ=2.94g/cm3=2940kg/m3,相对密度d=2940/1000=2.942-2已知某厂1号炉水平烟道中烟气组分的百分数为,α(CO2)=13.5%α(SO2)=0.3%,α(O2)=5.2%,α(N2)=76%,α(H2O)=5%。
试求烟气的密度。
解:查课表7页表2-1,可知ρ(CO2)=1.976kg/m3,ρ(SO2)=2.927kg/m3,ρ(O2)=1.429kg/m3,ρ(N2)=1.251kg/m3,ρ(H2O)=1.976kg/m3,ρ(CO2)=1.976kg/m3,3ρ=∑i iαρ=341.1kg/m2-3上题中烟气的实测温度t=170℃,实测静计示压强Pe=1432Pa,当地大气压Pa=100858Pa。
试求工作状态下烟气的密度和运动粘度。
应用流体力学课后习题答案【篇一:流体力学课后习题答案】1-7章课后答案【最新经典版】1.1 液体传动有哪两种形式?它们的主要区别是什么?答:用液体作为工作介质来进行能量传递的传动方式被称之为液体传动。
按照其工作原理的不同,液体传动又可分为液压传动和液力传动,其中液压传动是利用在密封容器内液体的压力能来传递动力的;而液力传动则的利用液体的动能来传递动力的。
1.2 液压传动系统由哪几部分组成?各组成部分的作用是什么?答:(1)动力装置:动力装置是指能将原动机的机械能转换成为液压能的装置,它是液压系统的动力源。
(2)控制调节装置:其作用是用来控制和调节工作介质的流动方向、压力和流量,以保证执行元件和工作机构的工作要求。
(3)执行装置:是将液压能转换为机械能的装置,其作用是在工作介质的推动下输出力和速度(或转矩和转速),输出一定的功率以驱动工作机构做功。
(4)辅助装置:除以上装置外的其它元器件都被称为辅助装置,如油箱、过滤器、蓄能器、冷却器、管件、管接头以及各种信号转换器等。
它们是一些对完成主运动起辅助作用的元件,在系统中是必不可少的,对保证系统正常工作有着重要的作用。
(5)工作介质:工作介质指传动液体,在液压系统中通常使用液压油液作为工作介质。
1.3 液压传动的主要优缺点是什么?答:优点:(1)与电动机相比,在同等体积下,液压装置能产生出更大的动力,也就是说,在同等功率下,液压装置的体积小、重量轻、结构紧凑,即:它具有大的功率密度或力密度,力密度在这里指工作压力。
(2)液压传动容易做到对速度的无级调节,而且调速范围大,并且对速度的调节还可以在工作过程中进行。
(3)液压传动工作平稳,换向冲击小,便于实现频繁换向。
(4)液压传动易于实现过载保护,能实现自润滑,使用寿命长。
(5)液压传动易于实现自动化,可以很方便地对液体的流动方向、压力和流量进行调节和控制,并能很容易地和电气、电子控制或气压传动控制结合起来,实现复杂的运动和操作。