PCS7功能块详细说明
- 格式:pdf
- 大小:279.75 KB
- 文档页数:7
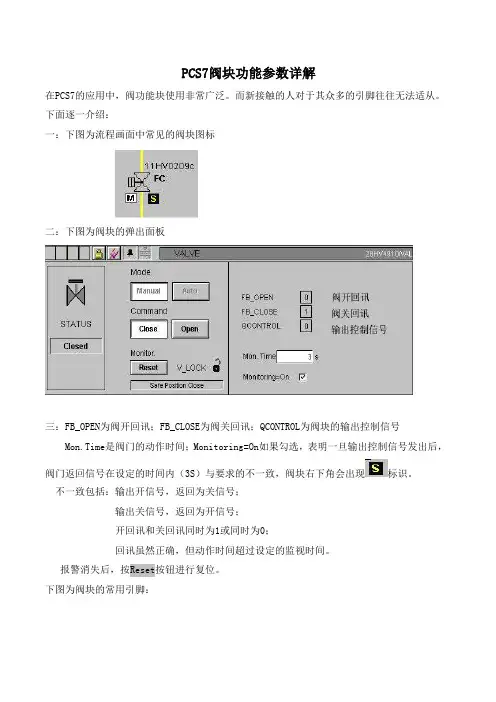
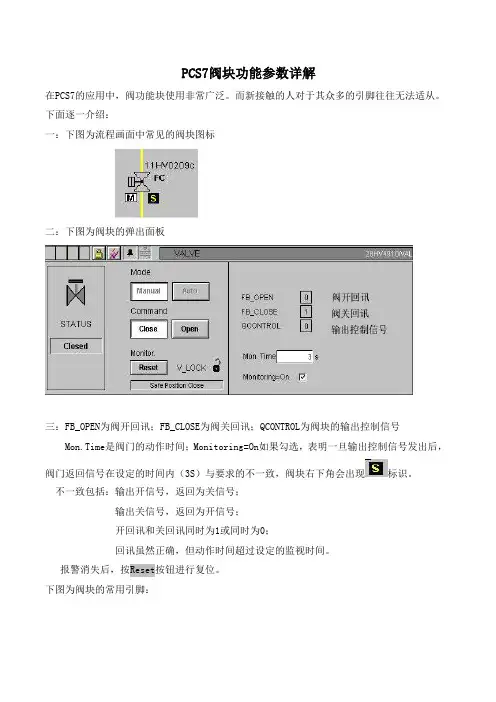
PCS7阀块功能参数详解在PCS7的应用中,阀功能块使用非常广泛。
而新接触的人对于其众多的引脚往往无法适从。
下面逐一介绍:一:下图为流程画面中常见的阀块图标二:下图为阀块的弹出面板三:FB_OPEN为阀开回讯;FB_CLOSE为阀关回讯;QCONTROL为阀块的输出控制信号Mon.Time是阀门的动作时间;Monitoring=On如果勾选,表明一旦输出控制信号发出后,阀门返回信号在设定的时间内(3S)与要求的不一致,阀块右下角会出现标识。
不一致包括:输出开信号,返回为关信号;输出关信号,返回为开信号;开回讯和关回讯同时为1或同时为0;回讯虽然正确,但动作时间超过设定的监视时间。
报警消失后,按Reset按钮进行复位。
下图为阀块的常用引脚:1.首先对FAULT_SS进行设置:若为0,表示一旦出现阀块报警,QCONTROL保持上一次的输出,若为1,QCONTROL输出为安全状态即等于0)。
因此通常状况下要设为“0”,否则一旦回讯出现故障,阀门将置于安全状态,影响连续生产,除非很重要的场合。
2.SS_POS:决定画面上阀块的图标旁显示FO还是FC。
为1表示是FO(气关阀);为0表示是FC(气开阀)。
3.阀块在自动方式下,AUTO_OC(1是开,0是关)与SS_POS一起决定了QCONTROL的值。
手动方式下,MAN_OC与SS_POS一起决定了QCONTROL的值。
如上图中,AUTO_OC为0,表明目的是要求阀关闭,而阀门是FO的,即得电关闭,因此决定了QCONTROL为1(DO卡对应通道为高电平)4.LIOP_SEL如果为1,表明强制阀块的控制方式(MODE下方的MAN和AUTO按钮为灰色,无法操作),至于是强制手动方式还是自动方式,取决于AUT_L。
如果AUT_L为0,表明强制为手动方式;若为1,表明强制为自动方式。
5.阀的颜色变化取决与QOPENED/CLOSED,一旦出现错误信息,QOPENED/CLOSED都为0阀颜色取决于安全位置对应的阀位。
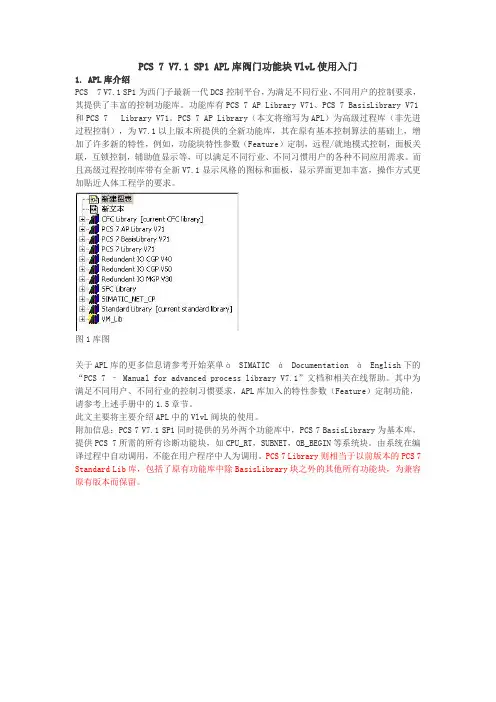
PCS 7 V7.1 SP1 APL库阀门功能块VlvL使用入门1. APL库介绍PCS 7 V7.1 SP1为西门子最新一代DCS控制平台,为满足不同行业、不同用户的控制要求,其提供了丰富的控制功能库。
功能库有PCS 7 AP Library V71、PCS 7 BasisLibrary V71和PCS 7 Library V71。
PCS 7 AP Library(本文将缩写为APL)为高级过程库(非先进过程控制),为V7.1以上版本所提供的全新功能库,其在原有基本控制算法的基础上,增加了许多新的特性,例如,功能块特性参数(Feature)定制,远程/就地模式控制,面板关联,互锁控制,辅助值显示等,可以满足不同行业、不同习惯用户的各种不同应用需求。
而且高级过程控制库带有全新V7.1显示风格的图标和面板,显示界面更加丰富,操作方式更加贴近人体工程学的要求。
图1库图关于APL库的更多信息请参考开始菜单àSIMATIC àDocumentation àEnglish下的“PCS 7 – Manual for advanced process library V7.1”文档和相关在线帮助。
其中为满足不同用户、不同行业的控制习惯要求,APL库加入的特性参数(Feature)定制功能,请参考上述手册中的1.5章节。
此文主要将主要介绍APL中的VlvL阀块的使用。
附加信息:PCS 7 V7.1 SP1同时提供的另外两个功能库中,PCS 7 BasisLibrary为基本库,提供PCS 7所需的所有诊断功能块,如CPU_RT,SUBNET,OB_BEGIN等系统块。
由系统在编译过程中自动调用,不能在用户程序中人为调用。
PCS 7 Library则相当于以前版本的PCS 7 Standard Lib库,包括了原有功能库中除BasisLibrary块之外的其他所有功能块,为兼容原有版本而保留。
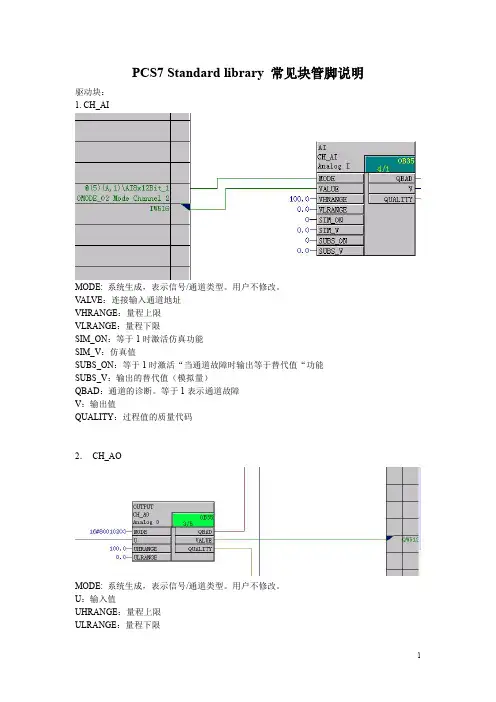
PCS7Standard library常见块管脚说明驱动块:1.CH_AIMODE:系统生成,表示信号/通道类型。
用户不修改。
VALVE:连接输入通道地址VHRANGE:量程上限VLRANGE:量程下限SIM_ON:等于1时激活仿真功能SIM_V:仿真值SUBS_ON:等于1时激活“当通道故障时输出等于替代值“功能SUBS_V:输出的替代值(模拟量)QBAD:通道的诊断。
等于1表示通道故障V:输出值QUALITY:过程值的质量代码2.CH_AOMODE:系统生成,表示信号/通道类型。
用户不修改。
U:输入值UHRANGE:量程上限ULRANGE:量程下限VALUE:输出通道地址QUALITY:过程值的质量代码3.CH_DIMODE:系统生成,表示信号/通道类型。
用户不修改。
VALVE:连接输入通道地址SIM_ON:等于1时激活仿真功能SIM_V:仿真值SUBS_ON:等于1时激活“当通道故障时输出等于替代值“功能SUBS_V:输出的替代值(模拟量)QBAD:通道的诊断。
等于1表示通道故障Q:输出值QUALITY:过程值的质量代码4.CH_DOMODE:系统生成,表示信号/通道类型。
用户不修改。
I:输入值VALUE:输出通道地址QUALITY:过程值的质量代码SIM_ON:等于1时激活仿真功能SIM_V:仿真值QBAD:通道的诊断。
等于1表示通道故障VALUE:输出通道的地址QUALITY:过程值的质量代码控制块:1.模拟量监视MEAS_MONCSF:控制系统故障。
连接通道的QBAD引脚U:过程值输入(PV)QC_U:过程值的质量代码U_AH:报警高高限U_WH:报警高限U_WL:报警低限U_AL:报警低低限HYS:偏差QH_ALM:高高报警输出(红色报警)QL_ALM:低低报警输出(红色报警)QH_WRN:高报警输出(黄色报警)QL_WRN:低报警输出(黄色报警)2.数字量监视:DIG_MONI:过程值QC_I:过程值的质量代码CSF:控制系统故障。
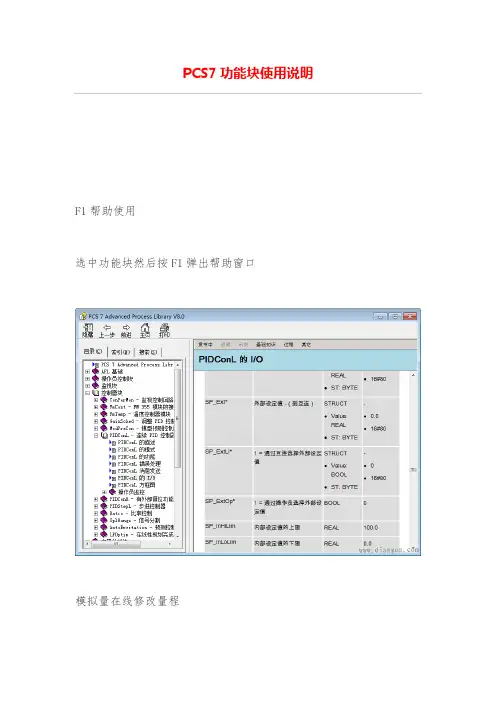
PCS7功能块使用说明F1帮助使用选中功能块然后按F1弹出帮助窗口模拟量在线修改量程打开模拟量转换块点击监控功能块点击功能块右键,选择WATCHON,在线监视功能块管脚。
单击某管脚右键ADDI/O或者安装CTRL+鼠标左键某管脚,监视成功管脚由蓝色转为黄色双击SCALE管脚弹出高低量程设置,双击HIGHVALUE设置高量程,双击LOWVALUE设置低量程,对于温度TC模块和RTD模块此通道可以设置为1。
管脚可见性功能块有点管脚默认是不可以见的,可以点击功能块的属性在IO菜单里面把“不可见”的勾去掉,然后点确定,所需要的管脚就显示在功能块上功能块的仿真使能功能块有一个管脚SimOn,1=仿真开启测试时,可以先把需要仿真的数据填好,例如上图的功能块需要输出60,则在SimPV_In管脚输入60,然后再把SimOn置1功能块互联管脚选中一个功能块的管脚然后再点需要连接到另一个功能块的管脚,软件自动生成黑色的连接线报警消息取消PCS7自动编译生成报警消息,如果WINCC不需要某功能块的报警消息,需要把管脚MsgLock在线监控状态下置1下载OS先把CFC编译,编译完成后,编译工程师站的OS编译完成后,打开所要下载到的操作员站,点击下载PCS7趋势归档PCS7的趋势归档变量是自动编译上去的,在有需要归档的功能块的管脚里面有个归档属性在离线状态下,双击需要归档的管脚点击Value,然后点击右下方的属性选择归档,然后点击确定,需要编译OS,把变量编译到归档变量里面。
报警注释修改PCS7自动编译生成报警,如果需要修改报警注释,把块的BlockComment(备注)名称修改即可。
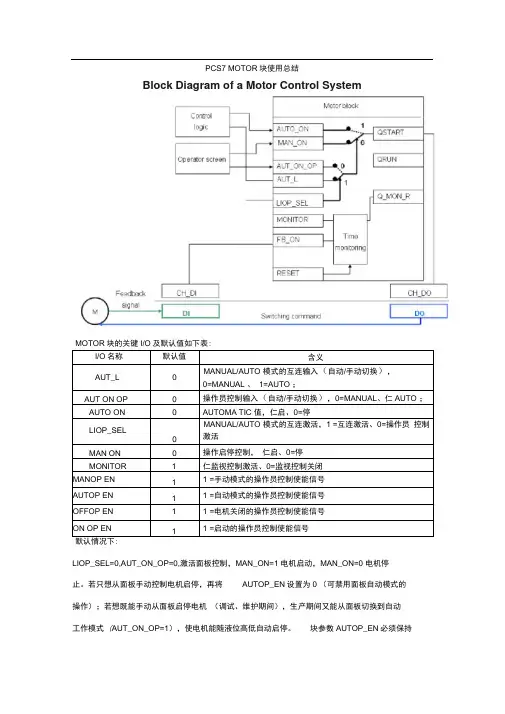
PCS7 MOTOR块使用总结Block Diagram of a Motor Control SystemI/O名称默认值含义AUT_L0MANUAL/AUTO 模式的互连输入(自动/手动切换),0=MANUAL 、1=AUTO ;AUT ON OP0操作员控制输入(自动/手动切换),0=MANUAL、仁AUTO ;AUTO ON0AUTOMA TIC 值,仁启、0=停LIOP_SELMANUAL/AUTO 模式的互连激活,1 =互连激活、0=操作员控制激活MAN ON0操作启停控制,仁启、0=停MONITOR1仁监视控制激活、0=监视控制关闭MANOP EN1 1 =手动模式的操作员控制使能信号AUTOP EN1 1 =自动模式的操作员控制使能信号OFFOP EN1 1 =电机关闭的操作员控制使能信号ON OP EN1 1 =启动的操作员控制使能信号LIOP_SEL=0,AUT_ON_OP=0,激活面板控制,MAN_ON=1 电机启动,MAN_ON=0 电机停止。
若只想从面板手动控制电机启停,再将AUTOP_EN设置为0 (可禁用面板自动模式的操作);若想既能手动从面板启停电机(调试、维护期间),生产期间又能从面板切换到自动工作模式(AUT_ON_OP=1),使电机能随液位高低自动启停。
块参数AUTOP_EN必须保持为1, 且将液位高启(停)电机、液位低停(启)电机的逻辑程序连接于电机的AUTO_ON 端。
图标中的电机应修改成泵,手动、自动状态显示不用修改;若想电机既能在面板手动控制,也能在现场控制箱上启停控制,且由现场控制箱上的开头决定那儿启停有效。
将LIOP_SEL 参数设置为1,将AUT_L 连接于C/L 选择开头,将AUTO_ON 连接于现场的启停信号。
此种结构需要将块图标中的A/M 模式显示改为LOCAL/CENTRE, 且在块实例属性事将AUTO_ON_OP 0 、1对应的文本改为集控/就地。
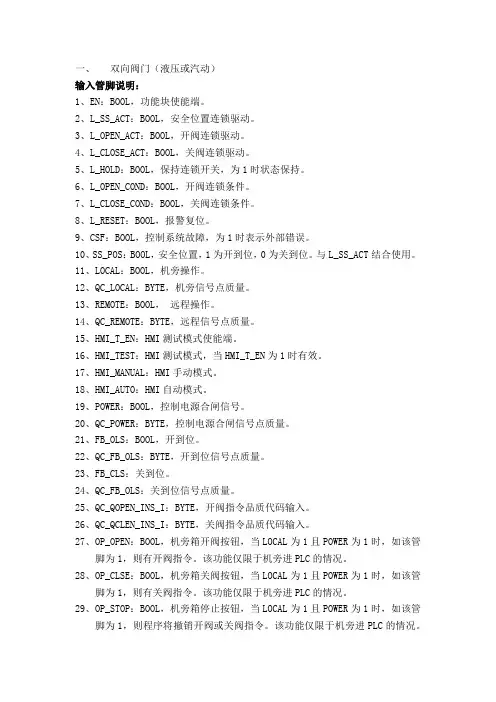
一、双向阀门(液压或汽动)输入管脚说明:1、EN:BOOL,功能块使能端。
2、L_SS_ACT:BOOL,安全位置连锁驱动。
3、L_OPEN_ACT:BOOL,开阀连锁驱动。
4、L_CLOSE_ACT:BOOL,关阀连锁驱动。
5、L_HOLD:BOOL,保持连锁开关,为1时状态保持。
6、L_OPEN_COND:BOOL,开阀连锁条件。
7、L_CLOSE_COND:BOOL,关阀连锁条件。
8、L_RESET:BOOL,报警复位。
9、CSF:BOOL,控制系统故障,为1时表示外部错误。
10、SS_POS:BOOL,安全位置,1为开到位,0为关到位。
与L_SS_ACT结合使用。
11、LOCAL:BOOL,机旁操作。
12、QC_LOCAL:BYTE,机旁信号点质量。
13、REMOTE:BOOL,远程操作。
14、QC_REMOTE:BYTE,远程信号点质量。
15、HMI_T_EN:HMI测试模式使能端。
16、HMI_TEST:HMI测试模式,当HMI_T_EN为1时有效。
17、HMI_MANUAL:HMI手动模式。
18、HMI_AUTO:HMI自动模式。
19、POWER:BOOL,控制电源合闸信号。
20、QC_POWER:BYTE,控制电源合闸信号点质量。
21、FB_OLS:BOOL,开到位。
22、QC_FB_OLS:BYTE,开到位信号点质量。
23、FB_CLS:关到位。
24、QC_FB_OLS:关到位信号点质量。
25、QC_QOPEN_INS_I:BYTE,开阀指令品质代码输入。
26、QC_QCLEN_INS_I:BYTE,关阀指令品质代码输入。
27、OP_OPEN:BOOL,机旁箱开阀按钮,当LOCAL为1且POWER为1时,如该管脚为1,则有开阀指令。
该功能仅限于机旁进PLC的情况。
28、OP_CLSE:BOOL,机旁箱关阀按钮,当LOCAL为1且POWER为1时,如该管脚为1,则有关阀指令。
该功能仅限于机旁进PLC的情况。
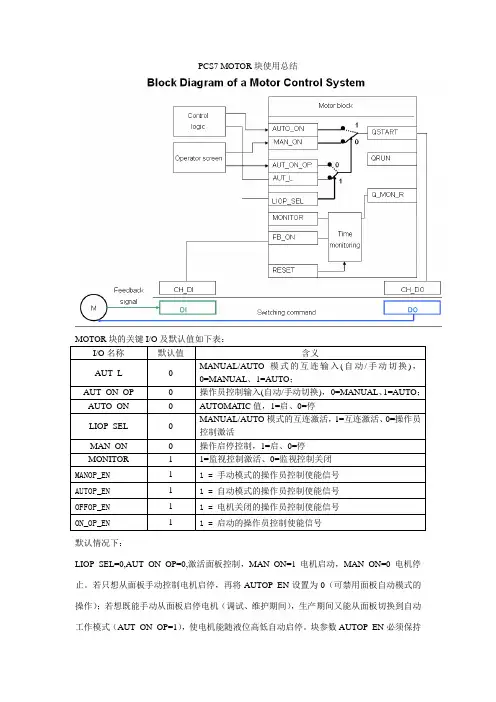
PCS7 MOTOR块使用总结I/O名称默认值含义AUT_L 0 MANUAL/AUTO模式的互连输入(自动/手动切换),0=MANUAL、1=AUTO;AUT_ON_OP 0 操作员控制输入(自动/手动切换),0=MANUAL、1=AUTO;AUTO_ON 0 AUTOMA TIC值,1=启、0=停LIOP_SEL 0 MANUAL/AUTO模式的互连激活,1=互连激活、0=操作员控制激活MAN_ON 0 操作启停控制,1=启、0=停MONITOR 1 1=监视控制激活、0=监视控制关闭MANOP_EN 1 1 = 手动模式的操作员控制使能信号AUTOP_EN 1 1 = 自动模式的操作员控制使能信号OFFOP_EN 1 1 = 电机关闭的操作员控制使能信号ON_OP_EN 1 1 = 启动的操作员控制使能信号默认情况下:LIOP_SEL=0,AUT_ON_OP=0,激活面板控制,MAN_ON=1电机启动,MAN_ON=0电机停止。
若只想从面板手动控制电机启停,再将AUTOP_EN设置为0(可禁用面板自动模式的操作);若想既能手动从面板启停电机(调试、维护期间),生产期间又能从面板切换到自动工作模式(AUT_ON_OP=1),使电机能随液位高低自动启停。
块参数AUTOP_EN必须保持为1,且将液位高启(停)电机、液位低停(启)电机的逻辑程序连接于电机的AUTO_ON 端。
图标中的电机应修改成泵,手动、自动状态显示不用修改;若想电机既能在面板手动控制,也能在现场控制箱上启停控制,且由现场控制箱上的开头决定那儿启停有效。
将LIOP_SEL参数设置为1,将AUT_L连接于C/L选择开头,将AUTO_ON连接于现场的启停信号。
此种结构需要将块图标中的A/M模式显示改为LOCAL/CENTRE,且在块实例属性事将AUTO_ON_OP 0、1对应的文本改为集控/就地。
(若是简单电机手动控制启停,可直接使用这些参数);若AUT_ON_OP=1则激活从AUTO_ON启停电机(使用CFC、SFC启停、逻辑程序启动电机)。
PCS7阀块功能参数详解在PCS7的应用中,阀功能块使用非常广泛。
而新接触的人对于其众多的引脚往往无法适从。
下面逐一介绍:一:下图为流程画面中常见的阀块图标二:下图为阀块的弹出面板三:FB_OPEN为阀开回讯;FB_CLOSE为阀关回讯;QCONTROL为阀块的输出控制信号Mon.Time是阀门的动作时间;Monitoring=On如果勾选,表明一旦输出控制信号发出后,阀门返回信号在设定的时间内(3S)与要求的不一致,阀块右下角会出现标识。
不一致包括:输出开信号,返回为关信号;输出关信号,返回为开信号;开回讯和关回讯同时为1或同时为0;回讯虽然正确,但动作时间超过设定的监视时间。
报警消失后,按Reset按钮进行复位。
下图为阀块的常用引脚:1.首先对FAULT_SS进行设置:若为0,表示一旦出现阀块报警,QCONTROL保持上一次的输出,若为1,QCONTROL输出为安全状态即等于0)。
因此通常状况下要设为“0”,否则一旦回讯出现故障,阀门将置于安全状态,影响连续生产,除非很重要的场合。
2.SS_POS:决定画面上阀块的图标旁显示FO还是FC。
为1表示是FO(气关阀);为0表示是FC(气开阀)。
3.阀块在自动方式下,AUTO_OC(1是开,0是关)与SS_POS一起决定了QCONTROL的值。
手动方式下,MAN_OC与SS_POS一起决定了QCONTROL的值。
如上图中,AUTO_OC为0,表明目的是要求阀关闭,而阀门是FO的,即得电关闭,因此决定了QCONTROL为1(DO卡对应通道为高电平)4.LIOP_SEL如果为1,表明强制阀块的控制方式(MODE下方的MAN和AUTO按钮为灰色,无法操作),至于是强制手动方式还是自动方式,取决于AUT_L。
如果AUT_L为0,表明强制为手动方式;若为1,表明强制为自动方式。
5.阀的颜色变化取决与QOPENED/CLOSED,一旦出现错误信息,QOPENED/CLOSED都为0阀颜色取决于安全位置对应的阀位。
pcs7pid块的用法
PCS7是西门子公司推出的一款集成自动化平台,可以用于对各种工业过程进行监控、控制和管理。
其中,PCS7中的PID 块是一种用来实现控制和调节功能的模块。
PID块主要用于对输入信号进行处理,计算输出信号,并根据控制策略不断进行反馈调节,以实现对被控对象的控制。
使用PCS7的PID块,一般需要进行以下几个步骤:
1. 定义PID参数:设置比例系数Kp、积分时间Ti和微分时间Td等参数,这些参数决定了PID控制器的控制特性。
2. 输入输出配置:将被控对象的输入信号和输出信号与PID
块进行连接,可以通过图形化的界面进行简单配置。
3. 选择控制策略:根据实际控制需求选择适当的控制策略,如比例控制、积分控制、微分控制或者它们的组合。
4. 参数调节:根据实际应用需求,通过在线调节PID参数来优化控制效果。
在PCS7中,PID块常用于各种工业过程的温度、压力、液位等控制场景中,确保被控对象能够稳定运行并满足设定要求。
PCS7 MOTOR块使用总结I/O名称默认值含义AUT_L 0 MANUAL/AUTO模式的互连输入(自动/手动切换),0=MANUAL、1=AUTO;AUT_ON_OP 0 操作员控制输入(自动/手动切换),0=MANUAL、1=AUTO;AUTO_ON 0 AUTOMA TIC值,1=启、0=停LIOP_SEL 0 MANUAL/AUTO模式的互连激活,1=互连激活、0=操作员控制激活MAN_ON 0 操作启停控制,1=启、0=停MONITOR 1 1=监视控制激活、0=监视控制关闭MANOP_EN 1 1 = 手动模式的操作员控制使能信号AUTOP_EN 1 1 = 自动模式的操作员控制使能信号OFFOP_EN 1 1 = 电机关闭的操作员控制使能信号ON_OP_EN 1 1 = 启动的操作员控制使能信号默认情况下:LIOP_SEL=0,AUT_ON_OP=0,激活面板控制,MAN_ON=1电机启动,MAN_ON=0电机停止。
若只想从面板手动控制电机启停,再将AUTOP_EN设置为0(可禁用面板自动模式的操作);若想既能手动从面板启停电机(调试、维护期间),生产期间又能从面板切换到自动工作模式(AUT_ON_OP=1),使电机能随液位高低自动启停。
块参数AUTOP_EN必须保持为1,且将液位高启(停)电机、液位低停(启)电机的逻辑程序连接于电机的AUTO_ON 端。
图标中的电机应修改成泵,手动、自动状态显示不用修改;若想电机既能在面板手动控制,也能在现场控制箱上启停控制,且由现场控制箱上的开头决定那儿启停有效。
将LIOP_SEL参数设置为1,将AUT_L连接于C/L选择开头,将AUTO_ON连接于现场的启停信号。
此种结构需要将块图标中的A/M模式显示改为LOCAL/CENTRE,且在块实例属性事将AUTO_ON_OP 0、1对应的文本改为集控/就地。
(若是简单电机手动控制启停,可直接使用这些参数);若AUT_ON_OP=1则激活从AUTO_ON启停电机(使用CFC、SFC启停、逻辑程序启动电机)。
PCS7Standard library常见块管脚说明驱动块:1.CH_AIMODE:系统生成,表示信号/通道类型。
用户不修改。
VALVE:连接输入通道地址VHRANGE:量程上限VLRANGE:量程下限SIM_ON:等于1时激活仿真功能SIM_V:仿真值SUBS_ON:等于1时激活“当通道故障时输出等于替代值“功能SUBS_V:输出的替代值(模拟量)QBAD:通道的诊断。
等于1表示通道故障V:输出值QUALITY:过程值的质量代码2.CH_AOMODE:系统生成,表示信号/通道类型。
用户不修改。
U:输入值UHRANGE:量程上限ULRANGE:量程下限VALUE:输出通道地址QUALITY:过程值的质量代码3.CH_DIMODE:系统生成,表示信号/通道类型。
用户不修改。
VALVE:连接输入通道地址SIM_ON:等于1时激活仿真功能SIM_V:仿真值SUBS_ON:等于1时激活“当通道故障时输出等于替代值“功能SUBS_V:输出的替代值(模拟量)QBAD:通道的诊断。
等于1表示通道故障Q:输出值QUALITY:过程值的质量代码4.CH_DOMODE:系统生成,表示信号/通道类型。
用户不修改。
I:输入值VALUE:输出通道地址QUALITY:过程值的质量代码SIM_ON:等于1时激活仿真功能SIM_V:仿真值QBAD:通道的诊断。
等于1表示通道故障VALUE:输出通道的地址QUALITY:过程值的质量代码控制块:1.模拟量监视MEAS_MONCSF:控制系统故障。
连接通道的QBAD引脚U:过程值输入(PV)QC_U:过程值的质量代码U_AH:报警高高限U_WH:报警高限U_WL:报警低限U_AL:报警低低限HYS:偏差QH_ALM:高高报警输出(红色报警)QL_ALM:低低报警输出(红色报警)QH_WRN:高报警输出(黄色报警)QL_WRN:低报警输出(黄色报警)2.数字量监视:DIG_MONI:过程值QC_I:过程值的质量代码CSF:控制系统故障。
PCS7Standard library常见块管脚说明驱动块:
1.CH_AI
MODE:系统生成,表示信号/通道类型。
用户不修改。
VALVE:连接输入通道地址
VHRANGE:量程上限
VLRANGE:量程下限
SIM_ON:等于1时激活仿真功能
SIM_V:仿真值
SUBS_ON:等于1时激活“当通道故障时输出等于替代值“功能
SUBS_V:输出的替代值(模拟量)
QBAD:通道的诊断。
等于1表示通道故障
V:输出值
QUALITY:过程值的质量代码
2.CH_AO
MODE:系统生成,表示信号/通道类型。
用户不修改。
U:输入值
UHRANGE:量程上限
ULRANGE:量程下限
VALUE:输出通道地址
QUALITY:过程值的质量代码
3.CH_DI
MODE:系统生成,表示信号/通道类型。
用户不修改。
VALVE:连接输入通道地址
SIM_ON:等于1时激活仿真功能
SIM_V:仿真值
SUBS_ON:等于1时激活“当通道故障时输出等于替代值“功能SUBS_V:输出的替代值(模拟量)
QBAD:通道的诊断。
等于1表示通道故障
Q:输出值
QUALITY:过程值的质量代码
4.CH_DO
MODE:系统生成,表示信号/通道类型。
用户不修改。
I:输入值
VALUE:输出通道地址
QUALITY:过程值的质量代码
SIM_ON:等于1时激活仿真功能
SIM_V:仿真值
QBAD:通道的诊断。
等于1表示通道故障VALUE:输出通道的地址
QUALITY:过程值的质量代码
控制块:
1.模拟量监视MEAS_MON
CSF:控制系统故障。
连接通道的QBAD引脚U:过程值输入(PV)
QC_U:过程值的质量代码
U_AH:报警高高限
U_WH:报警高限
U_WL:报警低限
U_AL:报警低低限
HYS:偏差
QH_ALM:高高报警输出(红色报警)
QL_ALM:低低报警输出(红色报警)
QH_WRN:高报警输出(黄色报警)
QL_WRN:低报警输出(黄色报警)
2.数字量监视:DIG_MON
I:过程值
QC_I:过程值的质量代码
CSF:控制系统故障。
连接QBAD
MSG_CLAS:报警级别,范围从1-8。
选择八条报警信息中的那一条作为报警输出。
Q:过程值输出。
Q=I
3.PID:CTRL_PID
GAIN:比例
TN:积分时间常数
TV:微分时间常数
PV_IN过程值
QC_PV_IN:过程值的质量代码
CSF:控制系统故障
SP_TRK_ON:设定值跟踪过程值
SP_EXT:外部输入/程序输入的设定值
SPEXTHLM:外给定SP的高限
SPEXTLLM:外给定SP的低限
LIOP_INT_SEL:决定是程序还是操作员具有选择内给定/外给定的权限SPEXON_L:程序里选择SP内给定/外给定的开关
SPEXTSEL_OP:操作员选择SP内给定/外给定的开关
SP_OP:操作员输入的设定值
LIOP_MAN_SEL:决定是程序还是操作员具有选择手动/自动的权限AUT_L:程序里选择手动/自动的开关
AUT_ON_OP:操作员选择手动/自动的开关
LMN_SEL:=1激活PID输出的外部跟踪值
LMN_TRK:PID输出的外部跟踪值
LMNR_IN:PID输出的反馈
QC_LMN_IN:输出反馈的质量代码
QSPEXTON:SP内给定/外给定的状态
QMAN_AUT:手动/自动的状态
LMN:PID调节输出
QC_LMN:调节输出的质量代码
ER:偏差SP-PV
SP:实际设定值
4.阀门:VALVE
FB_OPEN:开反馈
QC_FB_OP:开反馈的质量代码
FB_CLOSE:关反馈
QC_FB_CL:关反馈的质量代码
CSF:控制系统故障
LIOP_SEL:决定程序还是操作员来选择手动/自动的开关AUT_L:程序选择手动/自动
AUT_ON_OP:操作员选择手动/自动
MONITOR:激活监视反馈功能
TIM_MON:监视时间
MAN_ON:手动状态下的开停开关
AUTO_OC:自动状态下的开停开关
SS_POS:故障安全位置1=故障开;0=故障关
V_LOCK:1=阀门到故障安全位置
VL_OPEN:1=阀门开
VL_CLOSE:1=阀门关
优先级:V_LOCK>VL_CLOSE>VL_OPEN
QMON_ERR:阀门监视故障输出
QOPENED:阀门开状态
QCLOSED:阀门关状态
QCONTROL:控制输出(连接DO)
QMAN_AUT:阀门手自动状态
5.马达:MOTOR
FB_ON:开反馈
QC_FB_ON:开反馈的质量代码
CSF:控制系统故障
LIOP_SEL:决定程序还是操作员来选择手动/自动的开关AUT_L:程序选择手动/自动
AUT_ON_OP:操作员选择手动/自动
MAN_ON:手动状态下的开停开关
AUT_ON:自动状态下的开停开关
MONITOR:激活监视反馈功能
TIM_MON:监视时间
LOCK:联锁关马达(界别最高)
LOCK_ON:联锁开马达
QMON_ERR:马达监视故障输出
QRUN:马达正在运行
QSTOP:马达停止状态
QSTART:控制输出(连接DO)
QMAN_AUT:马达手自动状态。