常用电动执行机构工作原理及调试方法..共26页
- 格式:ppt
- 大小:3.03 MB
- 文档页数:26
DKJ型电动执行器的工作原理及调试方法摘要:主要介绍了DKJ电动执行器的工作原理及基本结构特点,现场调校以及在实际应用当中所遇到的一些技术问题以及解决的办法,在此都做了详细阐述。
前言DKJ型电动执行器在电厂的应用广泛,而因执行器引发的故障占日常维修工作中所占的比例非常高,就需要一些能掌握执行器维修的方式方法,我在几年的实践工作中通过自己的努力学习和探讨,终于掌握了一些维修技术,现在就把DKJ型电动执行器的工作原理及调试方法做一下简单介绍。
一、电动执行器的基本结构及其工作原理电动执行器是DDZ-Ⅲ型电动单元组合仪表中的执行单元。
它是以两相伺服电动机为动力的,接受调节器或操作器发送来的4-20mA 直流电信号,将其线性地转换成0°~90°的机械转角,用以操纵风门、挡板、阀门等调节机构,实现自动调节。
1、电动执行器的基本结构它是由伺服放大器和执行器两大部分组成。
伺服放大器又由电源、前置磁放大器、触发器主回路和校正回路组成。
执行器又包括伺服电动机、减速器和位置发送器等。
2、电动执行器的工作原理当电动操作器没动作时,伺服放大器的输放端无输入信号(即Ii=0)时,伺服放器没有输出,两相伺服电机不会转动,输出轴稳定在预先选好的零位上。
这时位置发送器的输出电流也为零位。
当电动操作器开大时,使伺服放大器的输入端有直流电信号Ii产生,再经过伺服放大器中的前置磁放大器对信号Ii与反馈信号If进行比较,放大的综合作用后产生生正偏差电信号I(其中I=Ii-I f﹥0),使触发器产生脉冲,导通相应的主回路,接通~220V电源,驱动伺服电机正转,经机械减速后,使输出轴转角θ(0°~90°)线性地转换成负反馈电流信号If(4~20mA)反馈到伺服放大器的输入端用以平衡输入信号,直至If≌Ii重新使偏差信号ΔI=0时,伺服电机才停止转动,输出轴停留在某一新的位置。
反之,当操作器开小时,伺服放大器的输入端输入信号也减小,再经过前置磁放大器的综合处理后,产生负偏差信号ΔI=0,这时会使另一个主回路导通,两相伺服电机反转,办理出轴转角θ减小,挡板或阀门承受之关小。
电动执行器工作原理一、概述电动执行器是一种通过电动机驱动的装置,用于控制和调节阀门、门窗、调节阀等机械设备的开关、调节和定位。
它是现代自动化控制系统中不可或缺的重要组成部分。
本文将详细介绍电动执行器的工作原理及其组成部分。
二、工作原理电动执行器的工作原理基于电动机的转动运动,通过将电动机的转动运动转换为直线运动或旋转运动,实现对阀门等机械设备的控制。
1. 电动机电动执行器中常用的电动机有直流电机和交流电机。
电动机通过电源提供的电能,将电能转化为机械能,驱动执行器的运动。
电动机的转速和转矩决定了执行器的动作速度和力矩。
2. 传动机构传动机构将电动机的旋转运动转换为直线运动或旋转运动,以实现对阀门等机械设备的控制。
常见的传动机构有蜗轮蜗杆传动、齿轮传动、链条传动等。
3. 控制电路控制电路是电动执行器的核心部分,用于控制电动机的启停、转向以及位置反馈等功能。
它接收来自控制系统的信号,并将信号转化为电动机的动作指令。
常见的控制电路包括驱动器、编码器、位置传感器等。
4. 位置反馈位置反馈是电动执行器实现精确定位的重要手段。
通过位置传感器等装置,可以实时监测执行器的位置,并将位置信息反馈给控制电路。
控制电路根据反馈的位置信息,调整电动机的运动,使执行器达到预定的位置。
5. 保护装置为了保护电动执行器的安全运行,常常会在其内部安装过载保护装置、过热保护装置等。
当电动执行器超过额定负载或温度过高时,保护装置会自动切断电源,以避免损坏设备。
三、应用领域电动执行器广泛应用于工业自动化领域,特别是在流体控制系统中的阀门控制、门窗控制、调节阀控制等方面。
以下是电动执行器的几个应用领域的简要介绍:1. 阀门控制电动执行器可用于各种类型的阀门控制,如球阀、蝶阀、闸阀等。
通过电动执行器的控制,可以实现阀门的开关、调节和定位等功能。
在工业生产中,阀门的控制对于流体的流量、压力和温度的调节非常重要。
2. 门窗控制电动执行器可用于门窗的开关和定位控制。

电动执行器工作原理电动执行器是一种常用的自动控制设备,广泛应用于工业自动化系统中。
它通过电动机驱动,将电能转化为机械能,实现对执行器的控制和操作。
本文将详细介绍电动执行器的工作原理。
一、电动执行器的组成部分电动执行器主要由电动机、减速机、传动机构和控制系统组成。
1. 电动机:电动执行器的心脏部分,通常采用交流电动机或直流电动机。
电动机的选择应根据执行器的工作要求和负载特性进行合理匹配。
2. 减速机:电动机的输出转速一般较高,为了适应执行器的工作要求,需要通过减速机将转速降低。
减速机通常由齿轮传动组成,可以实现高扭矩输出。
3. 传动机构:传动机构将减速机的输出转矩和转速传递给执行器,常见的传动机构有蜗轮蜗杆传动、齿轮传动等。
4. 控制系统:控制系统是电动执行器的智能部分,通过接收外部信号,控制电动机的启停、转向和速度等参数,实现对执行器的精确控制。
二、电动执行器的工作原理电动执行器的工作原理可以简单概括为:电能转化为机械能,通过传动机构实现执行器的运动。
1. 启动和停止:当控制系统接收到启动信号时,控制电动机启动。
电动机通过减速机和传动机构将转矩和转速传递给执行器,使其开始运动。
当控制系统接收到停止信号时,控制电动机停止运行,执行器停止工作。
2. 转向控制:电动执行器通常需要实现正转和反转两种运动方向。
通过控制电动机的正反转,可以实现执行器的转向控制。
控制系统通过改变电动机的电流方向,使电动机的旋转方向发生变化。
3. 速度控制:电动执行器的速度控制通常通过改变电动机的转速来实现。
控制系统可以通过调节电动机的输入电压、频率或者改变传动机构的传动比例来控制执行器的速度。
4. 位置控制:电动执行器可以实现对执行器位置的精确控制。
控制系统通过接收位置反馈信号,精确控制电动机的转动角度,从而实现对执行器位置的控制。
三、电动执行器的应用领域电动执行器在工业自动化系统中有着广泛的应用,常见的应用领域包括:1. 阀门控制:电动执行器可以用于控制各种类型的阀门,实现对流体的调节和控制。
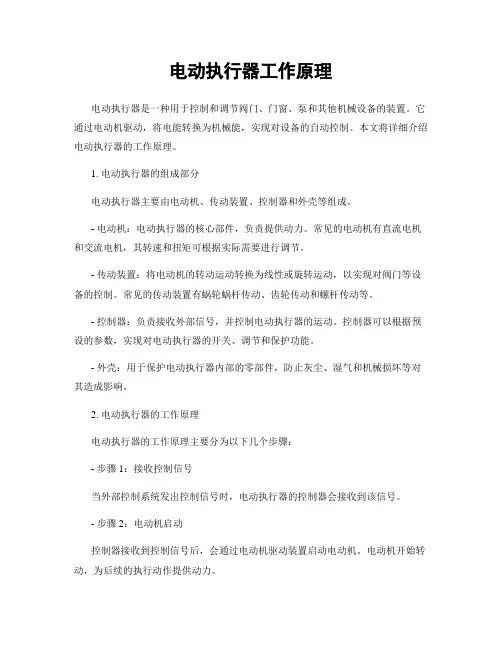
电动执行器工作原理电动执行器是一种用于控制和调节阀门、门窗、泵和其他机械设备的装置。
它通过电动机驱动,将电能转换为机械能,实现对设备的自动控制。
本文将详细介绍电动执行器的工作原理。
1. 电动执行器的组成部分电动执行器主要由电动机、传动装置、控制器和外壳等组成。
- 电动机:电动执行器的核心部件,负责提供动力。
常见的电动机有直流电机和交流电机,其转速和扭矩可根据实际需要进行调节。
- 传动装置:将电动机的转动运动转换为线性或旋转运动,以实现对阀门等设备的控制。
常见的传动装置有蜗轮蜗杆传动、齿轮传动和螺杆传动等。
- 控制器:负责接收外部信号,并控制电动执行器的运动。
控制器可以根据预设的参数,实现对电动执行器的开关、调节和保护功能。
- 外壳:用于保护电动执行器内部的零部件,防止灰尘、湿气和机械损坏等对其造成影响。
2. 电动执行器的工作原理电动执行器的工作原理主要分为以下几个步骤:- 步骤1:接收控制信号当外部控制系统发出控制信号时,电动执行器的控制器会接收到该信号。
- 步骤2:电动机启动控制器接收到控制信号后,会通过电动机驱动装置启动电动机。
电动机开始转动,为后续的执行动作提供动力。
- 步骤3:传动装置转动电动机的转动通过传动装置转换为线性或旋转运动。
例如,蜗轮蜗杆传动装置可以将电动机的旋转运动转换为阀门的线性运动。
- 步骤4:执行动作传动装置将电动机的运动传递给阀门等设备,实现对其的控制。
例如,当电动执行器用于控制阀门时,传动装置会将电动机的运动转换为阀门的开启或关闭动作。
- 步骤5:反馈信号在执行动作过程中,电动执行器的控制器会不断监测执行器的状态,并将反馈信号发送给外部控制系统。
这些反馈信号可以用于判断执行器是否正常工作,以及执行器的位置和状态等信息。
- 步骤6:停止运动当控制信号结束或达到预设条件时,电动执行器会停止运动。
电动机停止转动,传动装置停止传递动力,执行动作完成。
3. 电动执行器的应用领域电动执行器广泛应用于工业自动化控制系统中,常见的应用领域包括:- 阀门控制:电动执行器可用于控制各种类型的阀门,如球阀、蝶阀和闸阀等。
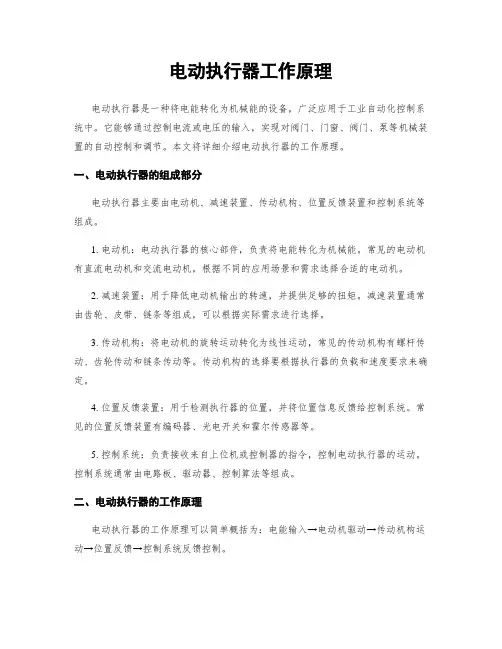
电动执行器工作原理电动执行器是一种将电能转化为机械能的设备,广泛应用于工业自动化控制系统中。
它能够通过控制电流或电压的输入,实现对阀门、门窗、阀门、泵等机械装置的自动控制和调节。
本文将详细介绍电动执行器的工作原理。
一、电动执行器的组成部分电动执行器主要由电动机、减速装置、传动机构、位置反馈装置和控制系统等组成。
1. 电动机:电动执行器的核心部件,负责将电能转化为机械能。
常见的电动机有直流电动机和交流电动机,根据不同的应用场景和需求选择合适的电动机。
2. 减速装置:用于降低电动机输出的转速,并提供足够的扭矩。
减速装置通常由齿轮、皮带、链条等组成,可以根据实际需求进行选择。
3. 传动机构:将电动机的旋转运动转化为线性运动,常见的传动机构有螺杆传动、齿轮传动和链条传动等。
传动机构的选择要根据执行器的负载和速度要求来确定。
4. 位置反馈装置:用于检测执行器的位置,并将位置信息反馈给控制系统。
常见的位置反馈装置有编码器、光电开关和霍尔传感器等。
5. 控制系统:负责接收来自上位机或控制器的指令,控制电动执行器的运动。
控制系统通常由电路板、驱动器、控制算法等组成。
二、电动执行器的工作原理电动执行器的工作原理可以简单概括为:电能输入→电动机驱动→传动机构运动→位置反馈→控制系统反馈控制。
1. 电能输入:通过电源将电能输入到电动执行器中。
根据实际需求,可以选择直流电源或交流电源。
2. 电动机驱动:电能经过电动机转化为机械能,驱动传动机构运动。
电动机的转动方向和转速可以通过控制系统来调节和控制。
3. 传动机构运动:电动机输出的旋转运动经过传动机构转化为线性运动或旋转运动,驱动执行器的工作部件(如阀门、门窗等)进行相应的动作。
4. 位置反馈:位置反馈装置检测执行器的位置,并将位置信息反馈给控制系统。
控制系统根据位置反馈信息来判断执行器的位置是否正确,并作出相应的调整。
5. 控制系统反馈控制:控制系统接收来自上位机或控制器的指令,并根据位置反馈信息进行反馈控制。
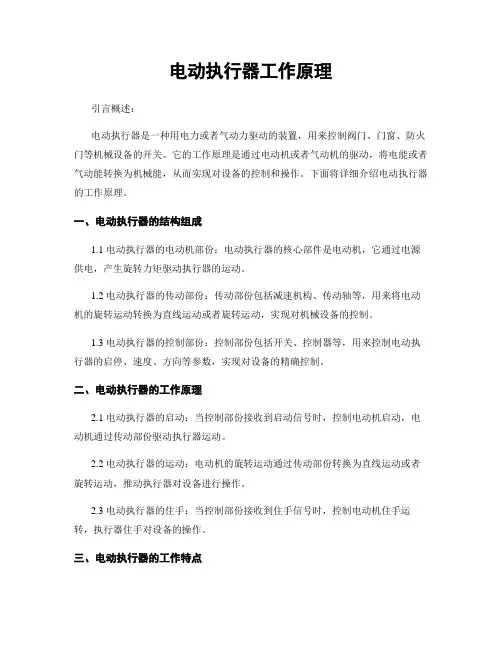
电动执行器工作原理引言概述:电动执行器是一种用电力或者气动力驱动的装置,用来控制阀门、门窗、防火门等机械设备的开关。
它的工作原理是通过电动机或者气动机的驱动,将电能或者气动能转换为机械能,从而实现对设备的控制和操作。
下面将详细介绍电动执行器的工作原理。
一、电动执行器的结构组成1.1 电动执行器的电动机部份:电动执行器的核心部件是电动机,它通过电源供电,产生旋转力矩驱动执行器的运动。
1.2 电动执行器的传动部份:传动部份包括减速机构、传动轴等,用来将电动机的旋转运动转换为直线运动或者旋转运动,实现对机械设备的控制。
1.3 电动执行器的控制部份:控制部份包括开关、控制器等,用来控制电动执行器的启停、速度、方向等参数,实现对设备的精确控制。
二、电动执行器的工作原理2.1 电动执行器的启动:当控制部份接收到启动信号时,控制电动机启动,电动机通过传动部份驱动执行器运动。
2.2 电动执行器的运动:电动机的旋转运动通过传动部份转换为直线运动或者旋转运动,推动执行器对设备进行操作。
2.3 电动执行器的住手:当控制部份接收到住手信号时,控制电动机住手运转,执行器住手对设备的操作。
三、电动执行器的工作特点3.1 精确控制:电动执行器可以通过控制部份实现对设备的精确控制,可以根据需要调整启停、速度、方向等参数。
3.2 高效能耗:电动执行器通过电能或者气动能转换为机械能,能够实现高效的能量转换,减少能源浪费。
3.3 自动化操作:电动执行器可以与控制系统相连,实现自动化操作,提高生产效率和工作效率。
四、电动执行器的应用领域4.1 工业自动化:电动执行器广泛应用于工业生产线上的阀门、门窗等设备的控制和操作。
4.2 水处理领域:电动执行器用于控制污水处理厂的阀门、泵等设备,实现污水处理的自动化操作。
4.3 建造领域:电动执行器用于控制建造物内的防火门、通风窗等设备,提高建造物的安全性和舒适性。
五、电动执行器的发展趋势5.1 智能化:随着物联网技术的发展,电动执行器将越来越智能化,能够实现远程监控和控制。
电动执行器工作原理一、引言电动执行器是一种将电能转化为机械能的装置,广泛应用于工业自动化控制系统中。
本文将详细介绍电动执行器的工作原理,包括其基本结构、工作原理、控制方式和应用领域等方面的内容。
二、基本结构电动执行器通常由电动机、减速机、传动机构和执行机构等组成。
电动机作为动力源,将电能转化为机械能;减速机用于减小电动机的转速并增加扭矩;传动机构将电动机的转动传递给执行机构;执行机构根据控制信号进行相应的动作,如开关、调节或者切断流体等。
三、工作原理1. 电动机驱动电动执行器的工作原理首先依赖于电动机的驱动。
电动机通常采用交流机电或者直流机电,其转速和扭矩可以通过控制电源电压或者电流来调节。
当电源接通时,电动机开始运转。
2. 减速机传动电动机的高速旋转需要通过减速机来降低转速,并提供足够的扭矩。
减速机通常由齿轮、链条或者带轮等组成,通过传动将电动机的转动传递给执行机构。
3. 传动机构传动机构是将减速机的转动传递给执行机构的重要组成部份。
常见的传动机构包括螺杆传动、齿轮传动和链条传动等。
传动机构的设计要考虑到执行机构的负载要求,以确保执行机构能够稳定可靠地工作。
4. 执行机构执行机构是电动执行器的核心部份,根据控制信号进行相应的动作。
常见的执行机构包括阀门、门禁、调节阀和切断阀等。
执行机构的工作原理根据不同的应用领域而有所不同,但通常都是通过电动力或者电磁力来实现开关、调节或者切断流体等操作。
四、控制方式电动执行器的控制方式多种多样,常见的控制方式包括手动控制、自动控制和远程控制等。
1. 手动控制手动控制是最基本的控制方式,通过手动操作按钮或者手柄来控制执行机构的动作。
这种控制方式适合于一些简单的应用场景,但操作人员需要现场操作,效率较低。
2. 自动控制自动控制是通过传感器和控制系统实现的。
传感器可以感知环境参数,如温度、压力和流量等,控制系统则根据传感器的反馈信号来控制执行机构的动作。
自动控制可以实现对执行机构的精确控制,并可以根据设定的条件进行自动调节和切换。
电动执行器工作原理电动执行器是一种用于实现运动控制的装置,通过电力驱动来完成机械装置、系统或过程中的线性或旋转运动。
它广泛应用于工业自动化、智能家居、航空航天等领域,具有灵活高效、精确可靠的特点。
本文将介绍电动执行器的工作原理。
一、电动执行器的基本组成结构电动执行器由电动机、减速器、传感器、驱动器和控制器等核心组件构成。
1. 电动机:电动执行器的动力来源,常用的电动机包括直流电动机和交流电机。
通过接收来自驱动器的电能输入,电动机可以驱动执行部件进行运动。
2. 减速器:电动执行器通常需要经过减速装置来提供更大的输出扭矩和较低的运动速度。
减速器可以通过齿轮传动、蜗轮蜗杆传动等方式实现。
3. 传感器:传感器用于感知和测量执行器的位置、速度、力量或其它相关参数。
这些信息将被传送到控制器,以便对电动执行器进行精确的控制和监测。
4. 驱动器:驱动器是电动执行器的控制单元,通过向电动机提供合适的电流和电压来控制其速度和方向。
驱动器可以根据控制器发送的信号,实现对电动执行器的精确控制。
5. 控制器:控制器是电动执行器系统的大脑,负责接收用户的指令并将其转化为操作信号,从而驱动电动执行器工作。
控制器还可以接收传感器的反馈信息,实现对电动执行器运动状态的实时监测和调整。
二、电动执行器的工作原理电动执行器的工作原理可以概括为以下几个步骤:1. 接收指令:控制器接收到用户的指令,根据指令确定电动执行器的运动要求,例如位置、速度和运动轨迹等。
2. 电能输入:驱动器向电动机提供适当的电源,根据控制信号提供合适的电压和电流,以满足执行器的运动需求。
3. 动力转换:电动机接收到电源输入后,将电能转化为机械能。
对于直流电机,电能通过电刷和换向器产生的磁场来驱动转子旋转;对于交流电机,电能通过磁场相互作用来产生旋转力。
4. 运动传递:电动机通过减速器将旋转运动转化为直线或转动运动。
减速器根据需要提供适当的输出力、速度和运动范围。
5. 运动控制:传感器监测和测量执行器的位置、速度和力量等参数,将这些信息反馈给控制器。