第6章_6.7自动操舵控制系统
- 格式:ppt
- 大小:396.00 KB
- 文档页数:17
自动舵控制系统设计船舶借助螺旋桨的推力和舵力来改变或保持航速和航向,实现从某港出发按计划的航线到达预定的目的港。
由此可见,操舵系统是一个重要控制系统,其性能直接影响着船舶航行的操纵性、经济性和安全性。
自动操舵仪是总结了人的操舵规律而设计的装置,是用来控制船舶航向的设备,能使船舶在预定的航向上运行,它能克服使船舶偏离预定航向的各种干扰影响,使船舶自动地稳定在预定的航向上运行,是操纵船舶的关键设备。
系统的调节对象是船,被调节量是航向。
自动舵是一个闭环系统,它包括:航向给定环节;航向检测环节;给定航向与实际航向比较环节;航向偏差与舵角反馈比较环节;控制器;执行机构;舵;调节对象—船;舵角反馈机构等。
自1922年自动舵问世到今天, 代替人力操舵的自动舵的发展确实取得了长足的进展, 在相当程度上减少了人力, 节约了燃料, 降低了机械磨损, 但是距离真正意义上的操舵自动化还有相。
当大的距离。
一国内外研究现状自70 年代起,国内一些科研院所、高校开展自动舵的理论与开发工作,并取得了不少成果,一些航海仪表厂家也独立或与研究所、高校合作开展了自动舵的试制和生产,其产品以模拟PID 舵为主。
目前虽然国产自适应舵已经投入实船使用,但效果并不明显。
智能控制舵还处于理论研究阶段,还没有产品化。
航迹舵基本上也处于研究阶段,还没有过硬的产品。
目前国外市场上有多种成熟的航向舵、航迹舵产品,其控制方法大多为比较成熟的自适应控制,例如日本Tokimec 公司的PR - 8000 系列自适应自动舵、德国Anschuz 公司的NAU TO CONTROL 综合系统中的自动舵、美国Sperry 公司VISIONTECHNOLOGY系统中的自适应自动舵等。
近几年发展起来的智能控制及其它近代控制在自动舵上应用尚处于方案可行性论证及实验仿真阶段,还有待于进一步工程实现研究。
我国对自适应舵的研究起步较晚,自80年代以来,有关单位开展了对自适应舵的研究工作,发表了一些设计方案,仿真研究结果和产品。
1、对于采用直流G-M系统供电的电动-机械舵机,发电机G采用的励磁方式是______。
A.并励B.串励C.他励D.差复励2、舵机的电力拖动系统应设置至少______个控制站(台);其控制系统应保证各控制站(台)______同时操作。
A.2/不可以B.2/可以C.3/可以D.1/不可以3、下列对船舶舵机的电力拖动与控制装置的基本要求的叙述错误的是______。
A.通常分左、右舷两路馈线方式向舵机供电,其中之一与应急电源相连B.至少有两个控制站(驾驶台和舵机房),控制站之间装有转换开关C.当舵叶转至极限位置时,舵机自动停止转舵,防止操舵设备受损D.从一舷最大舵角转至另一舷最大舵角的时间应不超过60 s4、下列对船舶舵机的电力拖动与控制装置的基本要求的叙述错误的是______。
A.通常采用一路供电并与应急电源相连B.至少有两个控制站(驾驶台和舵机房),控制站之间装有转换开关C.当舵叶转至极限位置时,舵机自动停止转舵,防止操舵设备受损D.从一舷最大舵角转至另一舷最大舵角的时间应不超过30 s5、下列对船舶舵机的电力拖动与控制装置的基本要求的叙述错误的是______。
A.通常分左、右舷两路馈线方式向舵机供电,其中之一与应急电源相连B.只需设有1个控制站(驾驶台)C.当舵叶转至极限位置时,舵机自动停止转舵,防止操舵设备受损D.从一舷最大舵角转至另一舷最大舵角的时间应不超过30 s6、下列对船舶舵机的电力拖动与控制装置的基本要求的叙述错误的是______。
A.通常分左、右舷两路馈线方式向舵机供电,其中之一与应急电源相连B.至少有两个控制站(驾驶台和舵机房),控制站之间装有转换开关C.随动和应急操舵时,极限偏转限位不工作D.从一舷最大舵角转至另一舷最大舵角的时间应不超过30 s7、下列关于舵机对电力拖动与控制的要求的诸多说法,正确的______。
A.应设有专用的柴油发电装置向舵机供电以保证供电可靠B.电动舵机的拖动电动机不允许发生堵转C.通常分左、右两舷馈线向舵机供电,其中之一与应急电源相连D.拖动电动机的过载能力较差8、下列关于舵机对电力拖动与控制的要求的诸多说法,错误的______。
舵机控制系统图舵机控制系统图第一章:引言1.1 研究背景和意义舵机是一种常见的控制装置,广泛用于机械系统中的位置控制。
舵机控制系统图是用于描述舵机与其他设备之间连接关系的图形表示方法。
它可以帮助工程师更好地了解系统的工作原理,优化系统的控制方案,提高系统的性能。
1.2 研究目的和内容本论文旨在研究舵机控制系统图的基本概念和应用方法,并通过实例分析验证其实用性。
具体内容包括舵机控制系统图的组成要素、绘制方法、示例分析等。
第二章:舵机控制系统图的组成要素2.1 舵机舵机是舵机控制系统图中的核心组成要素,它负责将输入信号转换为相应的机械运动。
舵机通常由电机、减速器和位置反馈传感器等部件组成。
2.2 控制器控制器负责根据输入信号生成适当的控制信号,控制舵机的运动和位置。
控制器可以是硬件控制器,如单片机或PLC,也可以是软件控制器,如上位机或嵌入式系统。
2.3 传感器传感器用于检测舵机的位置和运动状态,将其转换为电信号并传递给控制器。
常用的传感器有位置传感器、速度传感器和力传感器等。
2.4 电源电源为舵机系统提供能量,使舵机能够正常工作。
电源可以是直流电源或交流电源,具体选择与舵机的工作电压需求相关。
第三章:舵机控制系统图的绘制方法3.1 符号表示法舵机控制系统图使用统一的符号表示法,以便工程师能够快速识别和理解图中的各个元素。
常见的符号有方框表示控制器,箭头表示信号的流向,圆圈表示传感器等。
3.2 连接线的表示方法连接线用于表示各个组成要素之间的连接关系。
连接线有不同的表示方法,如直线连接和带箭头连接等,用于表达不同的信号流向和控制关系。
3.3 具体绘制步骤舵机控制系统图的绘制步骤包括确定系统的组成要素、制定系统的控制策略、绘制连接关系等。
在绘制过程中,需要考虑各个组成要素的位置、数量和连接方式等因素。
第四章:舵机控制系统图的应用与实例分析4.1 舵机控制系统图在机器人控制中的应用机器人控制是舵机控制系统图的重要应用领域之一。
第六章 典型飞行自动控制系统的工作原理 6.1 概述6.1.1典型飞行自动控制系统的组成描述飞机运动的参数有三个姿态角(θ、ψ、φ)、两个气流角(α、β)、两个线位移(H 、Y )与一个线速度(V )。
飞行控制的作用,就是应用负反馈控制原理对上述参数的部分或全部进行控制。
有时也根据需要也可控制与速度V 和迎角α有关的马赫数M 与法向过载。
实际上飞行自动控制就是按一定飞行控制律,输出三个舵偏角(e δ、r δ与a δ)与油门T δ对飞行器实现闭环控制。
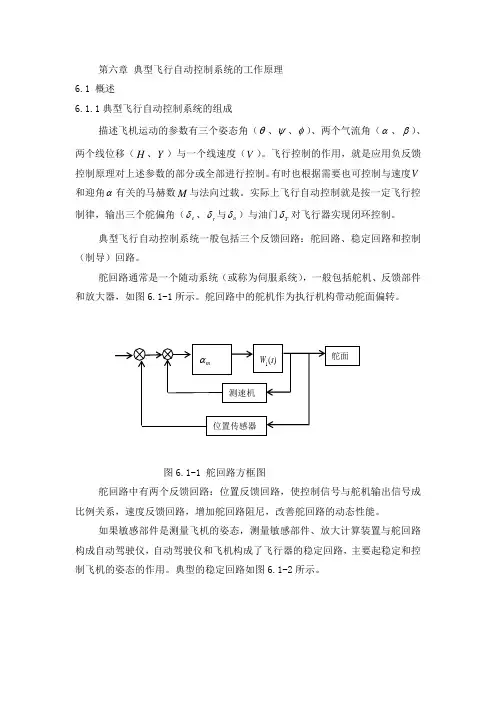
典型飞行自动控制系统一般包括三个反馈回路:舵回路、稳定回路和控制(制导)回路。
舵回路通常是一个随动系统(或称为伺服系统),一般包括舵机、反馈部件和放大器,如图6.1-1所示。
舵回路中的舵机作为执行机构带动舵面偏转。
图6.1-1 舵回路方框图舵回路中有两个反馈回路:位置反馈回路,使控制信号与舵机输出信号成比例关系,速度反馈回路,增加舵回路阻尼,改善舵回路的动态性能。
如果敏感部件是测量飞机的姿态,测量敏感部件、放大计算装置与舵回路构成自动驾驶仪,自动驾驶仪和飞机构成了飞行器的稳定回路,主要起稳定和控制飞机的姿态的作用。
典型的稳定回路如图6.1-2所示。
图6.1-2 稳定回路由稳定回路和飞机重心位置测量部件以与描述飞机空间几何关系的运动环节,组成更大的回路,称为控制(或称制导回路),如图6-3所示。
主要起稳定和控制飞机的运动轨迹的作用。
图6.1-3 控制(或制导)回路6.1.2 纵向控制飞行器纵向扰动运动,一般由短周期模态运动和长周期模态运动组成。
随着飞行器的速度越来越快,飞行高度越来越高,飞行包线围扩大,欲使飞行器在整个包线围满足飞行品质要求,普遍采用反馈控制技术。
例如高空飞行时,飞行器的阻尼特性常常变差,短周期模态特性趋于恶化,造成操纵反应过程中超调量过大,振荡加剧,严重影响飞行任务的完成,此时,可以在纵向通道引入适当的反馈可以改善飞行品质。
又如当飞行器要完成保持姿态角或等速V飞行时,即使飞行器具有良好的短周期模态时,但由于长周期模态振荡频率较低,衰减较慢,甚至是慢发散的。

大连海事大学继续教育学院(函授)教学周历版本:K 修改状态:0 DMU -2-095-1课程名称: 船舶柴油机 2013~2014 学年 第 1 学期 专业、层次、年级: 轮机工程专科12级 主讲教师: 刘勤安 教材名称: 主推进动力装置 中国海事服务中心组织编写 2008函授站站长签字:函授站大连海事大学继续教育学院(函授)教学周历版本:K 修改状态:0 DMU -2-095-1课程名称:船舶电气设备及系统 2013 ~2014 学年 第1学期 专业、层次、年级:轮机工程专科12级 主讲教师: 张春来 教材名称:《船舶电气(自学教材)》、《船舶电气培训教材》函授站站长签字:函授站大连海事大学继续教育学院(函授)教学周历版本:K 修改状态:0 DMU -2-095-1课程名称: 轮机英语听力与会话 2013 ~2014 学年 第 1 学期 专业、层次、年级: 轮机专科2012级 主讲教师: 段绪旭 教材名称: 轮机英语听力与会话/中海服/交通函授站站长签字:函授站大连海事大学继续教育学院(函授)教学周历版本:K 修改状态:0 DMU -2-095-1课程名称: 船舶辅机 2013 ~2014 学年 第 1 学期专业、层次、年级:轮机专科2012级 主讲教师: 陈海泉 教材名称: 《船舶辅机》2010版陈海泉编,大连海事大学出版社函授站站长签字:函授站轮机工程专科2012级船舶辅机平时作业第一次作业1.泵的性能参数有哪些?2.写出泵的工作扬程表达式,并说明每一项的物理意义。
3.写出并简要说明保证泵正常吸入条件的表达式。
4.写出并简要说明保证泵正常排出条件的表达式。
5.简述影响往复泵容积效率的主要因素。
6.往复泵上为何要设空气室,对空气室的管理应注意哪些问题?7.简述影响往复泵正常吸入的因素。
8.简述往复泵工作时没有水排出的可能原因。
9.简述齿轮泵流量不能太大的原因。
10.简述影响齿轮泵容积效率的因素。
操舵装置操舵装置的控制系统操舵装置能够使舵转动的装置称为操舵装置,通常指安装在舵机舱内的舵机和传动机构。
根据动力源的不同,操舵装置可分为电动操舵装置和液压操舵装置等;根据有关公约和规范,操舵装置又分主操舵装置和辅助操舵装置。
主操舵装置:系指在正常情况下为驾驶船舶而使舵产生动作所必需的机械、转舵机构、舵机装置动力设备(如设有)以及附属设备和向舵杆施加转矩的设施(如舵柄或舵扇)。
其中,转舵机构系指将液力转变为机械动作转动舵的部件。
舵机装置动力设备指:(1)如为电动舵机,系指电动机及辅助设备;(2)如为电动液压舵机,系指电动机及辅助的电气设备,以及与电动机相连的泵;(3)如为其他液压舵机,系指驱动机器及其相连的泵。
主操舵装置应在驾驶室和舵机室都设有控制器。
辅助操舵装置:系指在主操舵装置失效时,为驾驶船舶所必需的设备。
这些设备不成属于主操舵装置的任何部分,但可共用其中的舵柄、舵扇或作同样用途的部件。
动力转舵系统:系指提供动力转动舵杆的液压设备,由1个或几个舵机装置动力设备及辅助管路和附件,以及转舵机构所组成。
各个动力转舵系统可共用一些机械部件,如舵柄、舵扇和舵杆或作同样用途的部件。
(一)电动操舵装置电动操舵装置主要是指电动舵机。
它由电动机、蜗轮、小齿轮、舵扇、缓冲弹簧和舵柄等组成。
当由驾驶室操舵装置控制系统遥控电动机转动时,通过蜗杆、蜗轮、小齿轮带动松套在舵杆的舵扇旋转,舵扇再通过缓冲弹簧推动键套在舵杆上的舵柄,从而使舵杆和舵偏转。
采用蜗杆蜗轮的传动方式主要是为了获得较大的减速比,以增大转矩;同时,可以利用其机械传动中的自锁作用,防止舵叶在受外界冲击作用下发生逆转现象,从而起到保护电动机的作用。
缓冲弹簧的硬度较大,平时在正常的力作用下,弹簧不会变形,并能顺利地传递转舵力矩;当舵叶受到外界巨大的冲击力作用时,弹簧能吸引冲击能量,起保护舵机的作用。
电动舵机结构简单,操作方便,传动可靠,维修方便,所以广泛使用于中小型船舶。
自动舵控制系统设计船舶借助螺旋桨的推力和舵力来改变或保持航速和航向,实现从某港出发按计划的航线到达预定的目的港。
由此可见,操舵系统是一个重要控制系统,其性能直接影响着船舶航行的操纵性、经济性和安全性。
自动操舵仪是总结了人的操舵规律而设计的装置,是用来控制船舶航向的设备,能使船舶在预定的航向上运行,它能克服使船舶偏离预定航向的各种干扰影响,使船舶自动地稳定在预定的航向上运行,是操纵船舶的关键设备。
系统的调节对象是船,被调节量是航向。
自动舵是一个闭环系统,它包括:航向给定环节;航向检测环节;给定航向与实际航向比较环节;航向偏差与舵角反馈比较环节;控制器;执行机构;舵;调节对象―船;舵角反馈机构等。
自1922年自动舵问世到今天, 代替人力操舵的自动舵的发展确实取得了长足的进展, 在相当程度上减少了人力, 节约了燃料,降低了机械磨损, 但是距离真正意义上的操舵自动化还有相。
当大的距离。
一国内外研究现状自70 年代起,国内一些科研院所、高校开展自动舵的理论与开发工作,并取得了不少成果,一些航海仪表厂家也独立或与研究所、高校合作开展了自动舵的试制和生产,其产品以模拟PID 舵为主。
目前虽然国产自适应舵已经投入实船使用,但效果并不明显。
智能控制舵还处于理论研究阶段,还没有产品化。
航迹舵基本上也处于研究阶段,还没有过硬的产品。
目前国外市场上有多种成熟的航向舵、航迹舵产品,其控制方法大多为比较成熟的自适应控制,例如日本Tokimec 公司的PR - 8000 系列自适应自动舵、德国Anschuz 公司的NAU TO CONTROL 综合系统中的自动舵、美国Sperry 公司VISIONTECHNOLOGY系统中的自适应自动舵等。
近几年发展起来的智能控制及其它近代控制在自动舵上应用尚处于方案可行性论证及实验仿真阶段,还有待于进一步工程实现研究。
我国对自适应舵的研究起步较晚,自80年代以来,有关单位开展了对自适应舵的研究工作,发表了一些设计方案,仿真研究结果和产品。
自动操舵系统的基本要求和工作原理1.自动操舵系统基本要求在给定的航向上,为使船舶以足够的精度安全航行自动舵必须满足以下的基本要求:(1)自动操舵性能良好当船舶偏离给定航向一定角度(超过系统灵敏度所整定的角度)时,系统应立即工作,使舵叶偏转一定的角度,这个初始转舵角叫做一次偏舵角。
初始舵角应有适当的数值,如果过大会降低船舶航行速度,过小则产生的转船力矩不足以使船舶回到正航向来。
如果给出初始偏航舵角后船舶仍然偏离预定航向,自动舵必须保证有附加舵角(二次偏舵角)。
上述要求,实质上是选择比例舵的比例系数问题。
此外,在自动舵中还应具有微分和积分(或压舵)校正环节,其目的是使自动舵在调节过程中具有良好的动态性能和静态性能。
(2)具有必要的调节装置为了使同一型号的自动舵装置能够适用于不同的排水量、装载量、航速及舵机拖动装置的船舶,并能适应各种天气、海况,在自动舵系统中应有如下的基本调节装置:①灵敏度调节(俗称天气调节)。
灵敏度是指系统开始投入工作时的最小偏航角。
它视天气、海况而定。
在风平浪静时,灵敏度要调高一些;在大风大浪下,应适当降低自动舵的灵敏度,以减少动舵次数。
②舵角比例调节。
偏舵角与偏航角之比(即K1的数值)的大小,直接影响自动舵给出的一次偏舵角和二次偏舵角的数值,因此要根据船型、装载、航速等情况调节舵角比例,以获得一个合适的舵角比。
③反舵角调节。
偏航中的船舶在自动舵的作用下回复到正航向时,舵叶应先回到艏艉线上,然后再向另一舷偏过一个小角度,以防止船舶因惯性力而继续向另一侧偏航,这个预先的偏舵角称之为反舵角(又称制动舵角,稳舵角,纠偏舵角),应根据船型、装载、天气等情况进行调节。
反舵角可以由微分环节来实现反舵角调节主要调节微分系数K2,又称微分调节。
④压舵调节。
为了纠正船舶由于受到单侧风浪、水流等因素影响而引起的不对称偏航单侧偏航,自动舵中应当设有自动压舵/人工压舵的调节装置。
在具有航向积分环节的自动舵中,则设有积分调节,主要调节积分系数K3。