汽机TSI系统探头安装与调试方法
- 格式:doc
- 大小:77.50 KB
- 文档页数:2
TSI调试手册(3500)
轴向位移:
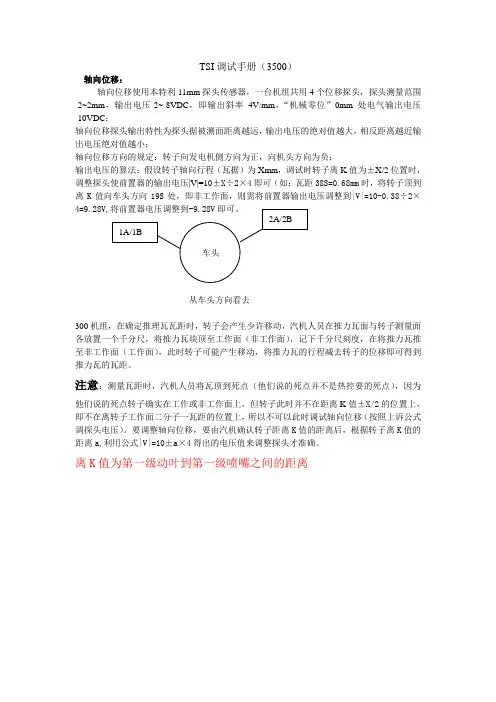
轴向位移使用本特利11mm探头传感器,一台机组共用4个位移探头,探头测量范围-2~2mm,输出电压-2~-8VDC,即输出斜率4V/mm,“机械零位”0mm处电气输出电压-10VDC;
轴向位移探头输出特性为探头据被测面距离越远,输出电压的绝对值越大,相反距离越近输出电压绝对值越小;
轴向位移方向的规定:转子向发电机侧方向为正,向机头方向为负;
输出电压的算法:假设转子轴向行程(瓦据)为Xmm,调试时转子离K值为±X/2位置时,调整探头使前置器的输出电压|V|=10±X÷2×4即可(如:瓦距38S=0.68mm时,将转子顶到离K值向车头方向19S处,即非工作面,则需将前置器输出电压调整到|V|=10-0.38÷2×4=9.28V,
从车头方向看去
300机组,在确定推理瓦瓦距时,转子会产生少许移动,汽机人员在推力瓦面与转子测量面各放置一个千分尺,将推力瓦块顶至工作面(非工作面),记下千分尺刻度,在将推力瓦推至非工作面(工作面),此时转子可能产生移动,将推力瓦的行程减去转子的位移即可得到推力瓦的瓦距。
注意:测量瓦距时,汽机人员将瓦顶到死点(他们说的死点并不是热控要的死点),因为
他们说的死点转子确实在工作或非工作面上,但转子此时并不在距离K值±X/2的位置上,即不在离转子工作面二分子一瓦距的位置上,所以不可以此时调试轴向位移(按照上诉公式调探头电压)。
要调整轴向位移,要由汽机确认转子距离K值的距离后,根据转子离K值的距离a,利用公式|V|=10±a×4得出的电压值来调整探头才准确。
离K值为第一级动叶到第一级喷嘴之间的距离。
1. 系统概述1 General Description Of The System汽轮机安全监测仪表系统(Turbine Supervisory Instrument,简称TSI)是一种可靠的连续检测汽轮发电机转子和汽缸的机械工作参数的多路监控系统,可以显示机组状态,为记录仪和计算机系统提供输出信号,并在超出预置的运行极限时发出报警,此外,还能使汽轮机自动停机和提供用于诊断性估算的各种测量数据。
Turbine Supervisory Instrumentation ( Turbine Supervisory Instrumentation , referred to as the TSI ) system is a reliable continuous detection of mechanical operating parameters of the turbine generator rotor and cylinder multi-channel monitoring system that can display unit provides analog output signals for the recorder and computer systems. TSI also output digital signals for alarm and trip when the input signals exceed the limit.本机组TSI采用的是BENTLEY3500系列模件。
This site use the 3500 series modules form BENTLEY.该保护系统设计有冗余的电源模件,由双路电源供电,任一路电源丧失可发出报警,保证系统安全可靠。
The protection system is provided with a redundant power supply module and is powered by double passage power supply. Alarm can be issued when any one power supply is lost to ensure safety and reliability of the system.TSI的测量回路是由探头、前置放大器、插件式组装仪表等组成。
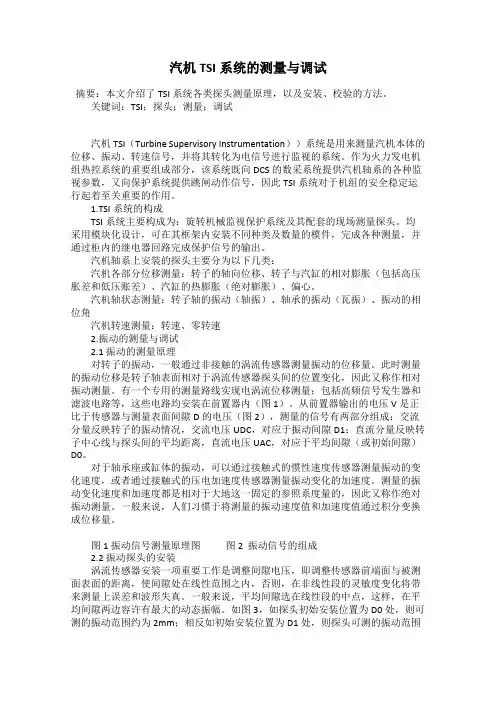
汽机TSI系统的测量与调试摘要:本文介绍了TSI系统各类探头测量原理,以及安装、校验的方法。
关键词:TSI;探头;测量;调试汽机TSI(Turbine Supervisory Instrumentation))系统是用来测量汽机本体的位移、振动、转速信号,并将其转化为电信号进行监视的系统。
作为火力发电机组热控系统的重要组成部分,该系统既向DCS的数采系统提供汽机轴系的各种监视参数,又向保护系统提供跳闸动作信号,因此TSI系统对于机组的安全稳定运行起着至关重要的作用。
1.TSI系统的构成TSI系统主要构成为:旋转机械监视保护系统及其配套的现场测量探头。
均采用模块化设计,可在其框架内安装不同种类及数量的模件,完成各种测量,并通过柜内的继电器回路完成保护信号的输出。
汽机轴系上安装的探头主要分为以下几类:汽机各部分位移测量:转子的轴向位移、转子与汽缸的相对膨胀(包括高压胀差和低压账差)、汽缸的热膨胀(绝对膨胀)、偏心。
汽机轴状态测量:转子轴的振动(轴振)、轴承的振动(瓦振)、振动的相位角汽机转速测量:转速、零转速2.振动的测量与调试2.1 振动的测量原理对转子的振动,一般通过非接触的涡流传感器测量振动的位移量。
此时测量的振动位移是转子轴表面相对于涡流传感器探头间的位置变化,因此又称作相对振动测量。
有一个专用的测量路线实现电涡流位移测量:包括高频信号发生器和滤波电路等,这些电路均安装在前置器内(图1)。
从前置器输出的电压V是正比于传感器与测量表面间隙D的电压(图2),测量的信号有两部分组成:交流分量反映转子的振动情况,交流电压UDC,对应于振动间隙D1;直流分量反映转子中心线与探头间的平均距离,直流电压UAC,对应于平均间隙(或初始间隙)D0。
对于轴承座或缸体的振动,可以通过接触式的惯性速度传感器测量振动的变化速度,或者通过接触式的压电加速度传感器测量振动变化的加速度。
测量的振动变化速度和加速度都是相对于大地这一固定的参照系度量的,因此又称作绝对振动测量。
1 传感器的安装与调试1.1轴承振动传感器探头的安装6个φ8 mm灵敏度为7.87 V/rnm 的涡流探头分别装于1号、2号、3号轴承处。
每个轴承处安装两只互成90°,垂直于轴承,探头与水平方向的夹角为45°,分别测量X、Y方向上的振动。
一般涡流传感器,涡流影响范围约为传感器线圈直径的三倍,因此传感器对应的测量宽度应为传感器直径的三倍,而且在传感器空间24mm范围内不应有其它金属物存在,否则会带来误差。
安装间隙电压应为传感器输出特性曲线确定的线形中点位而定,φ8 mm灵敏度为7.87 V/mm的探头,安装间隙电压为- 9.75 V或1.2 mm左右。
由于传感器线形电压范围大大超过测量范围,所以安装间隙允许有较大的偏差,只要保证测量范围在线形段内即可,但为了满足故障诊断和可靠性的需要,一般要求安装电压9.75土0.2 V。
1.2轴向位移、高低压差胀传感器的安装轴向位移测的是推力轴承相对汽缸的轴向位移,在机组运行过程中,使动静部件之间保持一定的轴向间隙,避免汽轮机内部转动部件和静止部件之间发生摩擦和碰撞。
两只轴向位移传感器探头安装在2号轴承处,分别装于甲乙两侧,探头朝向低压缸方向安装探头型号为7200型φ14 mm探头,灵敏度为3.937 V/mm,前置器供电电压为-24V。
大轴相对于汽缸的设计零点为止推轴承靠在工作瓦面为大轴零位。
在安装轴向位移和低压差胀传感器前,首先要把大轴推到零位,然后按要求安装。
轴向位移的量程范围为-2 mm一+ 2 mm,安装电压- 9.75土0.2 V 沾化电厂汽轮机膨胀相对死点在2号轴承处,高压缸转子膨胀在以2号轴承处为相对死点向前箱方向膨胀,低压缸转子膨胀在以2轴承处为相对死点向发电机方向膨胀。
高低压差胀探头为不带前置器φ25 mm涡流探头,灵敏度为0.8 V/ mm,因为高低压差胀都是朝着发电机方向安装,要使高低缸差胀测量范围均在线形范围之内,按照探头线性中点及量程范围- 2--10 mm定位。
大型汽轮机TSI系统现场安装及调试摘要:随着科学技术的不断发展,电能需求的日益增加,汽轮机单机容量也不断增大,其安全监测系统(TSI)能否精确地监测及稳定的工作就显得更加关键。
本文笔者通过汽轮机静态调试、传感器安装及联动调试。
对汽轮机TSI系统简要地进行全面分析。
关键词:测试;安装通电设备安装就位后,应由调试专业技术人员进行通电前检查,主要检查经过长距离输送后有无机械损坏以及有无短路或断路现象,尤其是控制电路板的插座柱针是否短路或断路。
机柜通电前必须要检查,确认一切正常后才可以通电。
第一次通电前应把所有监视器板及电源板拨出,合上电源开关送电,检查两路220V AC±10%电压和指示灯是否正常,并作两路电源切换试验,确认无异常关断电源,方可进行下一步。
按照厂家提供的相应的“汽轮机安全监视装置图”图示位置和名称,插上模件工作电源板,观察各指示灯是否正常,用万用表测量各电源板的输出是否正常,如无异常,关断电源进行下一步。
按照厂家提供的相应的“汽轮机安全监视装置图”图示位置和名称把各监测板插入到相应位置,检查电源指示和各板件面板指示是否正常,确认无异常后,关断电源,准备静态调试。
静态调试各监测板和传感器的名称、用途及技术指标可参考厂家提供的相应的“汽轮机安全监视装置说明书”或随机资料。
静态调试用设备:专用动态试验台、静态位移试验台、盖振试验台、24VDC电源、万用表、信号发生器、百分表、千分表。
以上各设备中,专用动态试验台推荐设备型号:D78A-342000AS,可用于测量转速、零转速、超速、偏心、鉴相、轴振动。
静态位移试验台推荐设备型号:D78A-341000AS,可用于测量轴位移、胀差及涡流传感器的灵敏度。
盖振试验台推荐型号:DF9282,可用于测量瓦振及校验速度传感器。
转速、零转速及超速测试参考厂家提供的相应的安全监视装置图,将转速、零转速和超速传感器装于转速动态试验装置上,间隙约0.8~1.0mm,再把各传感器接线至对应的端子上,用频率计验证转速值,用万用表测试相应转速值的4~20mA和0~10V 的模拟输出及零转速、超速(三取二)继电器输出。
汽机TSI探头安装质量控制要点一、TSI探头安装前应具备的条件1.应在汽轮机油循环合格后,机务进行最后一次翻瓦后进行。
2.就地接线盒和前置器至TSI机柜的电缆接线应全部完成并核对正确。
3.探头校验合格并有校验报告。
4.TSI机柜送电通道检查正常,5.应在汽机冷态下进行,严禁在凝汽器碱洗期间安装探头。
二、TSI探头安装过程控制要点1.转速探头应安装在转速支架上沿圆周方向垂直于转速齿轮,安装时应对正测速齿轮齿顶,其安装间隙值应在0.8~1.5mm之间,转速探头上的标志应符合厂家要求。
2.鉴相探头应对准主油泵端半联轴器上的鉴相槽,安装间隙应在0.8~1.5mm之间。
3.轴振探头X、Y方向应沿汽轮机大轴垂直中心线±45°安装,根据探头前置器输出电压来调整探头与轴承之间的距离。
电压值或间隙应符合厂家设定值要求。
4.轴向位移探头应垂直于推力盘并从高压缸指向低压缸方向,间隙调整时应按汽机厂家规定将转子推力盘顶至工作面,根据探头检验特性和间隙调整电压值与厂家设定值相同。
5.偏心探头安装应径向垂直于汽机大轴,调整其输出电压与厂家设定值相同。
6.高中压胀差、低压胀差探头安装时应垂直于转子胀差盘轴向,安装方向指向转子膨胀的正方向(高压胀差从高压缸指向低压缸方向,低压胀差从汽机指向发电机),调整其输出电压与厂家设定值相同。
三、探头安装验收1.锁紧探头的两只锁母应拧紧,无松动。
2.转速、鉴相探头的间隙应在0.8~1.5mm之间。
3.轴振、偏心探头的电压值间隙应符合厂家设定值和规范要求4.轴向位移、高中压胀差、低压胀差探头的电压值应符合厂家设定值。
5.延长电缆与传感器的接头应紧固,并用热缩套进行绝缘包扎。
汽轮机组TSI系统转速监控点调试与故障处理TSI转速监控系统作为汽轮机运行的安全监控系统在电力行业里已应用非常成熟,行业调试标准已成为准则。
试图从一些检修思路入手来分析这个系统,许多电厂使用的是美国本特利的产品(3500型号),也有使用艾普的或国产江苏无锡的产品,但测量原理基本一致,测量安装应用也基本一致。
标签:测量原理;检测器;故障现象1转速测量原理3500本特利系统测量转速采用的8mm的电涡流探头,转速测量回路的配置是:探头、前置器、延长线、监测器模块。
测量原理:利用电涡流探头采集大轴旋转产生的脉冲数,3500/50/53转速、超速监测器模块通过单片机芯片程序测出单位时间(s)的脉冲频率,然后通过公式(1)算出实时转速,这里有必要解释一下这个公式的推算道理,首先我们定义每分钟转数为n,1分钟有60s,1转z 个脉冲,那么单位时间计数脉冲比上齿数得出单位时间重复旋转次数,也就是f (频率),一分钟有多少转就为:n=60f。
下面以我厂的设备做简要引述:我厂使用的本特利3500/50/53转速、超速监测器模块,配3300xl-8mm proximitor电涡流传感器,电涡流传感器:根据法拉第电磁感应原理,金属导体置于变化的磁场中或在磁场中作切割磁力线运动时,导体内将呈涡旋状的感应电流,此电流叫电涡流。
以上现象称为电涡流,而根据这个效应制成的传感器为电涡流传感器。
由于传感器反馈回的电感电压是有一定频率的调幅信号,需检波后,才能得到间隙随时间变化的电压波形,由此得知,要测量位移必须有一个专用的测量线路,这一测量线路(称为前置器)应包括一定频率的稳定的震荡器和一个检波电路,涡流小传感器加上一测量线路,从前置器输出的电压Vd是正比于间隙d的电压,它分为两部分:一为直流电压Vde,对应于平均间隙(初始间隙);一为交流电压Vac,对应于变化间隙。
到这有人要问:测量转速和位移有什么关系?其实电涡流传感器主要用来侧间隙位移的,测量转速其实采的一个变化间隙位移所对应的变化的脉冲电压值(Vac),通过检波器后,把电压信号送到检测器(3500/50/53)上,它测算出脉冲频率,最后计算出转速。
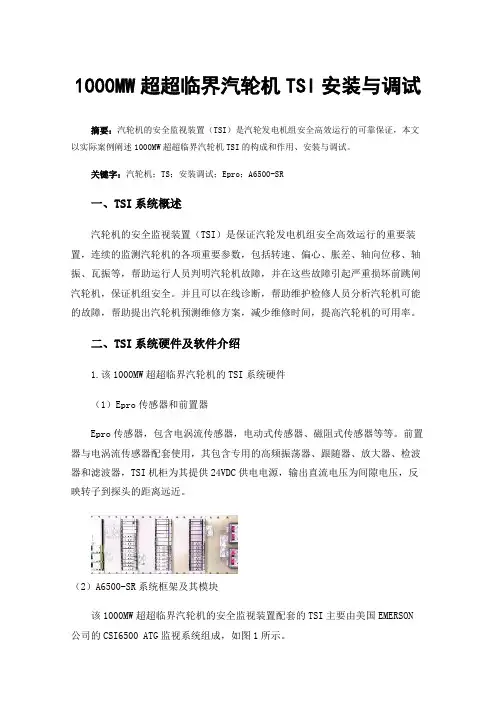
1000MW超超临界汽轮机TSI安装与调试摘要:汽轮机的安全监视装置(TSI)是汽轮发电机组安全高效运行的可靠保证,本文以实际案例阐述1000MW超超临界汽轮机TSI的构成和作用、安装与调试。
关键字:汽轮机;TS;安装调试;Epro;A6500-SR一、TSI系统概述汽轮机的安全监视装置(TSI)是保证汽轮发电机组安全高效运行的重要装置,连续的监测汽轮机的各项重要参数,包括转速、偏心、胀差、轴向位移、轴振、瓦振等,帮助运行人员判明汽轮机故障,并在这些故障引起严重损坏前跳闸汽轮机,保证机组安全。
并且可以在线诊断,帮助维护检修人员分析汽轮机可能的故障,帮助提出汽轮机预测维修方案,减少维修时间,提高汽轮机的可用率。
二、TSI系统硬件及软件介绍1.该1000MW超超临界汽轮机的TSI系统硬件(1)Epro传感器和前置器Epro传感器,包含电涡流传感器,电动式传感器、磁阻式传感器等等。
前置器与电涡流传感器配套使用,其包含专用的高频振荡器、跟随器、放大器、检波器和滤波器,TSI机柜为其提供24VDC供电电源,输出直流电压为间隙电压,反映转子到探头的距离远近。
(2)A6500-SR系统框架及其模块该1000MW超超临界汽轮机的安全监视装置配套的TSI主要由美国EMERSON 公司的CSI6500 ATG监视系统组成,如图1所示。
图1主机TSI机柜图通用型监测模块A6500-UM,与其它CSI-A6500-ATG监测模块配合使用时,可形成一个完整的API-670机械保护监测系统,用于监测偏心、胀差、轴向位移、轴振、瓦振、零转速、键相等等。
通讯模块A6500-CC,能够读取CSIA6500-ATG所有模块的参数,并通过ModBus-TCP/IP或ModBus-RTU(串行)将其输出,可以组态成冗余通讯模式。
热膨胀监视仪表DF9032,用于监测汽缸的热膨胀,即绝对膨胀。
CSI 6300 SIS 数字超速保护系统包含3个保护监测器和1个背板和机架。
TSI探头安装注意事项1、轴向位移、高胀、低胀均要在就地重新采集线性,根据采集的线性零点电压进行定零位(需要准备30mm或50mm 的千分表),推轴前将轴位移定初始零位,拉线性,能测出推轴的距离,备案。
在定零位前需要把汽机转子推到工作面(一般东汽300MW、600MW轴向发电机侧推),并测量间隙值。
2、全部探头装好后,在轴承盖盖上之前,将COM 端断开,测量信号线的对地绝缘。
3、#7、#8轴振要把整根电缆与机侧绝缘。
4、探头中间接头处一定要进行绝缘包裹,使用耐油热缩管。
5、大机转速探头的安装顺序。
6、信号电缆的分屏和总屏在就地一侧分开且对地绝缘,一定要做到。
在盘柜一侧与机柜相连汇为一点统一联结到保护地接地桩处。
模件自身的接地(直流供电接地)建议直接接入直流地接地桩。
若接地网没有分直流和保护地建议在远方汇为一点。
7、安装探头时一定要小心,探头比较脆,固定时力量要适当。
8、PR9376的探头要注意定向点沿轴向指向正前方或正后方。
9、现场接线箱内的铠装电缆要包绝缘以避免铠装电缆的外壳影响到其它传感器的信号线。
10、若低胀探头是补偿式测量,需将其中一只前置器内的J1跳线剪断,以使两支前置器的工作频率不同防止接力区间的涡流干扰。
11、后键相(电气功角测量)支架在前键相支架前安装一支点,将后键相装在前键相支架上(针对鹤壁III期的2*600MW机组)。
12、保证探头探测面整体垂直对应在被测面上(或被测齿)。
被测齿宽要大于探头直径(在轴的轴向移动时探头始终保持整体对应在被测面内)。
13、静态探头固有特性是远离为正方向,若安装位置的测量方向与固有特性相反需要在组态中取反。
14、转速探头安装间隙为0.8-1.0mm(以被测齿盘的齿轮凸顶为准),现场一般按0.85mm定制间隙。
15、校验静态探头的线性时,活动支架的手轮只允许向一个方向转动,以防止产生支架的机械回程误差造成组态中线性不正确。
16、轴振探头PR6423均按间隙电压-12V(+0.5v)进行安装。
汽轮机监视系统(TSI)安装调试问题和对策摘要:汽轮机监视系统是影响汽轮机组正常运行的重要环节,安装、调试在整个机组中的比重较少,很多专业人员忽视这一环节,给汽轮机的运行留下了安全隐患。
本文分析当前汽轮机检系统在安装、调试中的常见问题,提出对应的解决对策,希望能带来帮助,提高人们对TSI系统的重视。
关键词:汽轮机监视系统(TSI);安装调试问题;解决策略引言汽轮机监视系统一般包括各种涡流检测探头、速度式探头、前置器、延长电缆、监视仪表组件等内容,是一种连续检测汽轮发电机组和气缸工作参数的监控系统,实现机组的运行数据的实施监控,记录仪表盘提供的内容。
当数据显示异常并触发报警系统的时候,系统自动采取停机保护措施,测量故障过程中的各个数据。
一般使用的安全监测系统主要对汽轮机发电机的转速、轴向位移、振动、键相等内容实时检测,一旦出现异常就会启动报警系统,在濒临危险数值时启用紧急跳闸停机措施,提高汽轮机的安全性。
1汽轮机监视系统(TSI)安装调试中的常见问题1.1振动信号干扰在实际应用汽轮机监测系统的时候,会发现汽轮机的真逗信号频率较高,有时候会达到临界值触发报警系统甚至有跳闸的风险,降低系统的保护功能。
一旦机组出现跳闸,影响汽轮机的正常运行,增加运行和维护的工作负担,提高设备损坏的概率,在无形中增加了运行成本。
发生这种现象的主要原因是由于TSI系统出现信号干扰,高电压电缆的敷设走向与信号的振动频率一致,出现了共振情况。
想要解决振动信号干扰问题有三个途径,一个是将汽轮机监视设备连接地面,接地电阻符合设计要求,二是采取屏蔽系统,安装屏蔽电缆、屏蔽线等,三是在系统中合理添加滤波和延时装置,减少过渡的保护机制。
在汽轮机中严格按照TSI系统的安装要求,不使用涡流式振动探头,从而减少磁场的信号干扰问题。
600MW机组TSI系统运行的过程中测量的数值偏大,主要是因为涡流式探头与发电机的距离过近,探头受到磁场的干扰,导致振动的频率增高,数据不准确。
1 传感器的安装与调试1.1轴承振动传感器探头的安装6个φ8 mm灵敏度为7.87 V/rnm 的涡流探头分别装于1号、2号、3号轴承处。
每个轴承处安装两只互成90°,垂直于轴承,探头与水平方向的夹角为45°,分别测量X、Y方向上的振动。
一般涡流传感器,涡流影响围约为传感器线圈直径的三倍,因此传感器对应的测量宽度应为传感器直径的三倍,而且在传感器空间24mm围不应有其它金属物存在,否则会带来误差。
安装间隙电压应为传感器输出特性曲线确定的线形中点位而定,φ8 mm灵敏度为7.87 V/mm的探头,安装间隙电压为- 9.75 V或1.2 mm左右。
由于传感器线形电压围大大超过测量围,所以安装间隙允许有较大的偏差,只要保证测量围在线形段即可,但为了满足故障诊断和可靠性的需要,一般要求安装电压9.75土0.2 V。
1.2轴向位移、高低压差胀传感器的安装轴向位移测的是推力轴承相对汽缸的轴向位移,在机组运行过程中,使动静部件之间保持一定的轴向间隙,避免汽轮机部转动部件和静止部件之间发生摩擦和碰撞。
两只轴向位移传感器探头安装在2号轴承处,分别装于甲乙两侧,探头朝向低压缸方向安装探头型号为7200型φ14 mm探头,灵敏度为3.937 V/mm,前置器供电电压为-24V。
大轴相对于汽缸的设计零点为止推轴承靠在工作瓦面为大轴零位。
在安装轴向位移和低压差胀传感器前,首先要把大轴推到零位,然后按要求安装。
轴向位移的量程围为-2 mm一+ 2 mm,安装电压- 9.75土0.2 V 沾化电厂汽轮机膨胀相对死点在2号轴承处,高压缸转子膨胀在以2号轴承处为相对死点向前箱方向膨胀,低压缸转子膨胀在以2轴承处为相对死点向发电机方向膨胀。
高低压差胀探头为不带前置器φ25 mm涡流探头,灵敏度为0.8 V/ mm,因为高低压差胀都是朝着发电机方向安装,要使高低缸差胀测量围均在线形围之,按照探头线性中点及量程围- 2--10 mm定位。
电厂 TSI 测点安装调试及常见故障诊断与处理摘要:随着经济社会的发展,电力系统装机容量也日益增大,TSI系统作为汽轮机最重要的监测保护系统之一,对TSI系统的依赖性也越来越高,因此TSI系统设备直接影响机组的安全运行。
火电机组TSI探头的安装是火电厂热控安装不可或缺的重要组成部分。
本文对安装过程的注意事项做了详细说明。
关键词:TSI探头;安装方法;注意事项一、探头的安装1.轴位移安装汽轮机高中压转子轴位移以高压转子推力间隙的中心为零位,正方向为低压缸方向为正方向,发电机侧为负方向,即“贴近为正”。
轴位移探头为电涡流传感器,型号为 TQ402,灵敏度 4mV/mm。
安装轴位移探头步骤:1.1首先让机务人员测定轴向推力间隙。
(经上次测量,推力间隙经测量为0.43mm)。
1.2机务人员用千斤顶将大轴推向工作面(发电机侧推力瓦)。
1.3经监理人员与电建单位确认轴位置无误后,开始安装轴位移探头。
1.4零位电压确定方法:定义零位电压为-9.6V,因为 TQ402 探头的测量的线性范围为[-17.6V,-1.6V],量程 4mm,所以取线性电压的中心-9.6V 为零位电压,则可以保证量程为[-2mm,2mm]。
1.5安装电压确定方法:由于推力间隙的中心为推力零位,对应电压为-9.6V (在 TSI 组态中已定义),将转子顶死在发电机侧推力瓦后,此时的轴位移应为-0.215mm,因此安装电压为-9.6-4×0.215=-10.46V1.6调整探头在支架上的位置(用万用表监视间隙电压,间隙电压为前置器上的 O/P 端子和2COM 端子之间的电压)使间隙电压显示-10.46V,然后将轴向位移探头固定在支架上并锁紧,用铁棒敲击安装支架,如果间隙电压没有变化,即可。
1.7此时 DCS 应显示轴向位移值:-0.215mm。
说明:如果机组是以大轴推向非工作面(低压缸侧推力瓦),那么上述第五步改为:安装电压确定方法:由于推力间隙的中心为推力零位,对应电压为-9.6V(在TSI 组态中已定义),将转子顶死在低压缸侧推力瓦后,此时的轴位移应为0.215mm,因此安装电压为-9.6+4×0.215=-8.74V2. 高中压转子胀差安装图1 斜坡胀差安装示意图A、 B 探头定义如图所示,发电机侧的探头为 A 探头,低压缸侧的探头为 B 探头2.1 斜坡法测量胀差原理:2.1.1 如上图,转子相对于固定在轴承箱的探头的实际移动距离是上图直角三角形中的斜边,但是由于斜坡的存在,可以通过测量直角边(较短的直角边),然后通过三角函数的运算得到斜边的长度,即转子水平移动的距离,即斜边=短直角边×sin8°。
1 传感器的安装与调试1.1轴承振动传感器探头的安装6个φ8 mm灵敏度为7.87 V/rnm 的涡流探头分别装于1号、2号、3号轴承处。
每个轴承处安装两只互成90° ,垂直于轴承,探头与水平方向的夹角为45°,分别测量X、Y方向上的振动。
一般涡流传感器,涡流影响范围约为传感器线圈直径的三倍,因此传感器对应的测量宽度应为传感器直径的三倍,而且在传感器空间24mm范围内不应有其它金属物存在,否则会带来误差。
安装间隙电压应为传感器输出特性曲线确定的线形中点位而定,φ8 mm灵敏度为7.87 V/mm的探头,安装间隙电压为- 9.75 V或1.2 mm左右。
由于传感器线形电压范围大大超过测量范围,所以安装间隙允许有较大的偏差,只要保证测量范围在线形段内即可,但为了满足故障诊断和可靠性的需要,一般要求安装电压9.75土0.2 V。
1.2轴向位移、高低压差胀传感器的安装轴向位移测的是推力轴承相对汽缸的轴向位移,在机组运行过程中,使动静部件之间保持一定的轴向间隙,避免汽轮机内部转动部件和静止部件之间发生摩擦和碰撞。
两只轴向位移传感器探头安装在2号轴承处,分别装于甲乙两侧,探头朝向低压缸方向安装探头型号为7200型φ14 mm探头,灵敏度为3.937 V/mm,前臵器供电电压为-24V。
大轴相对于汽缸的设计零点为止推轴承靠在工作瓦面为大轴零位。
在安装轴向位移和低压差胀传感器前,首先要把大轴推到零位,然后按要求安装。
轴向位移的量程范围为-2 mm一+ 2 mm,安装电压- 9.75土0.2 V 沾化电厂汽轮机膨胀相对死点在2号轴承处,高压缸转子膨胀在以2号轴承处为相对死点向前箱方向膨胀,低压缸转子膨胀在以2轴承处为相对死点向发电机方向膨胀。
高低压差胀探头为不带前臵器φ25 mm涡流探头,灵敏度为0.8 V/ mm,因为高低压差胀都是朝着发电机方向安装,要使高低缸差胀测量范围均在线形范围之内,按照探头线性中点及量程范围- 2--10 mm定位。
2017.05.24汽机TSI探头原理、安装调试本特利传感器安装、调试授课教师:王伟2017年05月24日TSI 系统概述培训讲师:×××TurbineSupervisoryInstrumentSystemAndTurbineEmergencyTripSystem汽轮机安全监视及保护系统TSI系统概述培训讲师:×××TSI监测信息提供了动平衡和在线诊断数据,维修人员可通过诊断数据的帮助,分析可能的机器故障,帮助提出机器预测维修方案,预测维修信息能推测出旋转机械的维修需要,使机器维修更有计划性,减少维修时间,其结果是减少了维修费用,提高了汽轮机组的可用率。
电涡流传感器工作原理:通过传感器端部线圈与被测物体(导电体)间的间隙变化来测物体的振动相对位移量和静位移的,它与被测物之间没有直接的机械接触。
培训讲师:×××汽轮机TSI探头分类汽轮机转速汽轮机轴振汽轮机偏心汽轮机胀差汽轮机轴位移汽轮机键相培训讲师:×××汽轮机转速传感器型号:3300XL—8mmProximitor前置器转速通道选用3500/53卡件,为单通道卡件(50卡零转速卡为双通道)。
转速量程设置为0-5000转/分,门槛电压设为自动,滞回电压为0.5VDC,齿数为60,当机器旋转时,齿盘的齿顶和齿底经过探头,探头将周期地改变输出信号,即脉冲信号,板件接收到此脉冲信号进行计数、显示。
培训讲师:×××零转速测量示意图脉冲频率(f)转速=—————×60(rpm)齿数(z)培训讲师:×××转速(超速)测量示意图超速保护应具有快速响应和错误冗余表决逻辑,因此本测量链采用“三取二”方式。
由三只装于前箱、正对于60齿盘的涡流传感器组成。
当机组转速n≥3300r/min 且满足三取二的逻辑要求时,超速保护输出继电器接点,经ETS逻辑处理后,遮断汽轮机。
汽轮机TSI探头安装及需要注意的问题TSI全称汽轮机的安全监测系统(Turbine Supervisory Instrumentation),通过对汽机转速、胀差、膨胀、偏心、轴位移等监测,让汽机安全运行。
滦河电厂六期工程汽轮机是北重汽轮机,TSI采用Epro MMS 6000系列。
汽轮机转速探头安装间隙1mm,通过塞尺测量的,安装结构如下图:转机飞锤飞出探头安装间隙3.6mm,通过量块测量。
键相探头、偏心探头#1~8瓦X/Y轴振#1~8瓦瓦振高中低压缸胀差轴位移1,2,3汽轮机推力盘间隙0.285mm测量装置采用电涡流传感器,属非接触型测量方式,它由3部分组成,即探头、传感器电缆、信号转换器。
涡流探头中含有1个测量线圈,前置器中高频振荡电流通过延伸电缆流入该线圈产生一个轴向磁场,当被测金属体靠近这个磁场时切割磁力线产生电涡流,电涡流的强弱随探头与被测体表面之间间距的变化而变化,并经延伸电缆送至前置器检波、放大转化成随机械位移变化的电压信号。
信号转换器由高频振荡器、振荡解调器、低通滤波器、信TSI系统安装中热工方面注意的事项:(1)汽轮机温态不可进行TSI系统调整。
TSI系统探头调整不可在温态下进行,因为蒸汽进入汽轮机后,转子及汽缸均会膨胀。
由于转子质量较小,温升较快,故而膨胀比汽缸较快产生胀差。
温态下胀差值很难计算且不便于修正,因此,TSI系统探头调整应在常温下进行才能准确地显示出机组静止部分和转动部分之间的相对轴向位移。
(2)TSl系统涡流探头的校验。
可直接测量探头的电阻值,确定涡流探头的质量。
在TSI 的涡流探头系统校验时,探头、延长电缆和前置器应成套进行且TSI卡件内的组态、保护报警定值必须按照厂家说明书的要求正确设置。
(3)提高TSI系统连接线路的可靠性。
1)安装时,就地探头的线路要远离强电磁干扰源和高温区。
信号线中间接头处应使用热缩管做好绝缘处理,要有可靠措施以确保延伸电缆的固定与走向不会出现损伤电缆的可能。
XXXXXXXXXX公司热能中心节能降耗技改工程汽轮机监视系统及汽轮机保护系统调试案编写:审查:审批:XXXXX技术服务有限公司2011年9月目录1 设备系统概述 (1)2 编制依据 (1)3 调试目的及围 (1)4 调试前具备的条件 (1)5 调试法及步骤 (1)6调试的控制要点及安全注意事项 (8)7 调试质量验收标准 (8)8 调试组织与分工 (8)9调试仪器.......................................................................... 错误!未定义书签。
10附录............................................................................... 错误!未定义书签。
1设备系统概述1.1系统简介:汽轮机监视仪表系统(TSI)由市厚德自动化仪表公司供货。
TSI装置采用HZD8500D监控保护系统,8500D 旋转机械保护系统系统机箱左下四个槽位依次为系统电源2 个和8位继电器模块2 个,其它槽位可安装功能模块,16 位继电器模块建议靠右放。
系统采用双路冗余式电源,通讯控制模块采用32 位嵌入式处理器、7 英寸触摸显示屏,其运行速度快、工作可靠,采用图形用户界面,操作简单、友好便。
ETS即汽轮机危急遮断系统,它接受来自TSI系统或汽轮发电机组其它系统来的报警或停机信号,进行逻辑处理,输出报警信号或汽轮机遮断信号。
为了使用便运行可靠,采用DEH 一体化进行逻辑处理。
该装置能与DEH系统融为一体,满足电厂自动化需求。
1.2系统功能简介:汽机TSI主要监视参数有:轴向位移、偏心、键相、轴振、缸胀等。
机组TSI输出的跳闸信号送入ETS中,报警信号和模拟量信号送入DCS、DEH(505控制器)。
ETS系统的相关设备主要包括保护柜,信号采样元件等。
ETS逻辑还具有首出记忆功能,汽机保护紧急跳闸功能。
汽轮机TSI探头安装及需要注意的问题TSI全称汽轮机的安全监测系统(Turbine Supervisory Instrumentation),通过对汽机转速、胀差、膨胀、偏心、轴位移等监测,让汽机安全运行。
滦河电厂六期工程汽轮机是北重汽轮机,TSI采用Epro MMS 6000系列。
汽轮机转速探头安装间隙1mm,通过塞尺测量的,安装结构如下图:转机飞锤飞出探头安装间隙3.6mm,通过量块测量。
键相探头、偏心探头#1~8瓦X/Y轴振#1~8瓦瓦振高中低压缸胀差轴位移1,2,3汽轮机推力盘间隙0.285mm测量装置采用电涡流传感器,属非接触型测量方式,它由3部分组成,即探头、传感器电缆、信号转换器。
涡流探头中含有1个测量线圈,前置器中高频振荡电流通过延伸电缆流入该线圈产生一个轴向磁场,当被测金属体靠近这个磁场时切割磁力线产生电涡流,电涡流的强弱随探头与被测体表面之间间距的变化而变化,并经延伸电缆送至前置器检波、放大转化成随机械位移变化的电压信号。
信号转换器由高频振荡器、振荡解调器、低通滤波器、信TSI系统安装中热工方面注意的事项:(1)汽轮机温态不可进行TSI系统调整。
TSI系统探头调整不可在温态下进行,因为蒸汽进入汽轮机后,转子及汽缸均会膨胀。
由于转子质量较小,温升较快,故而膨胀比汽缸较快产生胀差。
温态下胀差值很难计算且不便于修正,因此,TSI系统探头调整应在常温下进行才能准确地显示出机组静止部分和转动部分之间的相对轴向位移。
(2)TSl系统涡流探头的校验。
可直接测量探头的电阻值,确定涡流探头的质量。
在TSI 的涡流探头系统校验时,探头、延长电缆和前置器应成套进行且TSI卡件内的组态、保护报警定值必须按照厂家说明书的要求正确设置。
(3)提高TSI系统连接线路的可靠性。
1)安装时,就地探头的线路要远离强电磁干扰源和高温区。
信号线中间接头处应使用热缩管做好绝缘处理,要有可靠措施以确保延伸电缆的固定与走向不会出现损伤电缆的可能。
汽机TSI系统探头安装与调试方法:
测量与止推轴承法兰表面的间隙,防止止推轴承的损坏。
安装调整顺序是:先将汽机大轴推向机头方向靠死,再将大轴推向发电机方向靠死,测出两死点间的行程量,再将大轴调整到两行程中间距离安装探头,同时,检查探头间隙电压是否符合要求,使探头间隙恰为处于仪表的量程中点(示值为“0”)。
共安装了两个双通道轴向位移监视器,每一个双通道位移监视器由2个14mm涡流传感器、2个相应的前置器和2根延长电缆组成,二个通道组成或门报警,二个通道组成与门发出停机信号,从逻辑上防止了误动作。
这两个通道中的一个如发生故障,可以把它切除转到单通道工作状态。
两个通道轴向位监视器都可以单独工作,也可以同时工作,共同监视汽轮发电机的运行情况,这样提高了汽轮机安全运行的可靠性,每个通道都有相应的继电器接点输出。
轴向位移的安装调整中情况如表1
相对膨胀
用来连续指示转子与机壳的轴向间隙,防止静摩擦,导致灾难性事故。
调整方法是:在确定好两探头之间的总间隙(包括靠背轮的厚度)这后,拉动拖板向机头方向(间隙4mm)和向发电机方向(间隙15mm)调整,以前置器的输出电压为基准。
由于相对膨胀由两只探头信号叠加而成的,且受到靠背轮的材质、光洁度影响,所以,相对膨胀的调整要向汽机方向、发电机方向来回调整多次,找出最佳安装位置。
间隙调整好后,可对显示仪表进行刻度校验。
热膨胀过程中,当被监测轴环移动超出第一个探头测量范围时,紧接着就进入第二个探头监测量程,由监测器内的微处理器选择从一个传感器线形范围转换到另一个传感器的线形范围。
安装调整如表2
数字转速表\
数字转速表连续监测汽轮机得转速,转速输入为每转60个脉冲,它是通过安装在转轴上的齿轮(有60个齿)、涡流探头和前置器得到的:
f=nz/60其中,z=齿轮齿数(60个)
转轴的转速在数字表的液晶显示屏幕上显示出来,而且有相应的——自流信号输出到DEH系统,,转速表系统设有独立的报警电路,报警的设定值预调到600rpm,当转轴速度超出设定值时,相应的报警继电器动作,常开接点闭合,接通后汽缸喷水,当转轴速度低于600rpm时,处于闭合状态的继电器接点打开,从而关闭后汽缸喷水,打开轴承顶轴油泵和回转设备喷油嘴。
安装调整情况见表3。
零转速测量安装调整情况见表3
偏心/键相监视器安装调整情况见表3
复合振(轴的绝对振动)
它是由一种复合式探头监测器采完成的,复合式探头传感器系统是一个涡流探头和一个速度传感器的组合,安装在一个组件里。
换句话说,是由一组涡流探头、前置器、延长电缆和一组速度探头及延长电缆组成,它即可以测转子的相对振动,轴承盖的绝对振动,也可以测量转子的绝对振动,它是由转子的相对振动和轴承盖的绝对振动矢量相加而获得的D对于油膜轴承的设备,由于这些轴承支撑结构的柔性相一致,有30%以上轴振动是一定要传递到轴承箱体上,到这种程度,仅测量轴振是不能够提供足够的保护或诊断信息。
#2—5瓦各安装了一个复合探头。
安装调整情况见表4。