自由度计算例题
- 格式:ppt
- 大小:773.50 KB
- 文档页数:8
自由度计算习题及答案自由度计算习题及答案自由度是统计学中一个重要的概念,用于描述样本数据中可以自由变动的部分。
在统计学中,我们常常需要计算自由度来进行假设检验、方差分析等统计推断。
本文将给出一些自由度计算的习题及答案,帮助读者更好地理解和应用这一概念。
习题一:假设有一组样本数据,包含10个观测值。
我们希望进行一个t检验,假设总体均值为0。
请计算该t检验的自由度。
解答一:t检验的自由度由样本容量和样本数据的分布决定。
对于独立样本t检验,自由度等于两组样本的自由度之和再减去2。
在这个例子中,我们只有一组样本数据,因此自由度为10-1=9。
习题二:某公司想要比较两种不同的广告策略对销售额的影响。
他们随机选择了两组顾客,每组分别观看了不同的广告。
请计算用于比较两组销售额的独立样本t检验的自由度。
解答二:在独立样本t检验中,自由度等于两组样本的自由度之和再减去2。
假设第一组观测了n1个顾客,第二组观测了n2个顾客,那么自由度为n1+n2-2。
习题三:某研究人员想要比较三种不同的治疗方法对患者疼痛程度的影响。
他们随机将患者分为三组,每组接受不同的治疗。
请计算用于比较三组疼痛程度的方差分析的自由度。
解答三:方差分析的自由度由分子自由度和分母自由度组成。
对于一元方差分析,分子自由度为组数减1,即3-1=2。
分母自由度为总样本容量减去组数,即n-3。
在这个例子中,假设每组的样本容量为n,则分母自由度为3n-3。
习题四:某研究人员想要比较两种不同的教学方法对学生成绩的影响。
他们随机将学生分为两组,一组接受传统教学,另一组接受创新教学。
请计算用于比较两组学生成绩的配对样本t检验的自由度。
解答四:配对样本t检验的自由度等于配对观测值的数量减去1。
在这个例子中,假设有n对配对观测值,则自由度为n-1。
通过以上习题及答案的解析,我们可以看到自由度的计算对于统计推断是至关重要的。
正确计算自由度可以确保我们所做的统计分析具有可靠性和准确性。
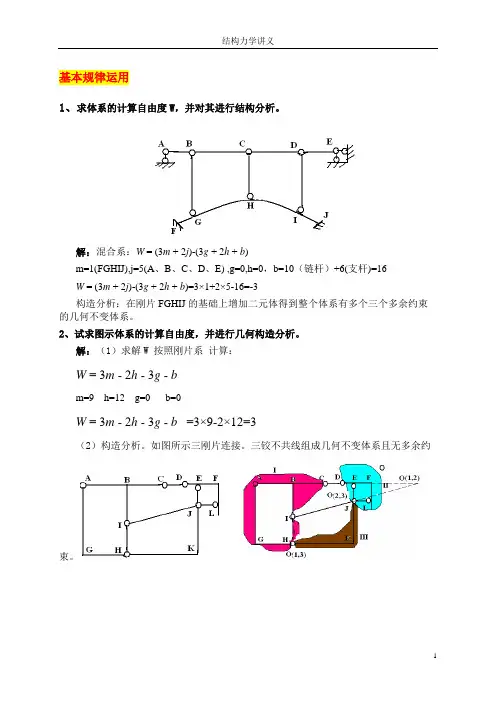
基本规律运用1、求体系的计算自由度W,并对其进行结构分析。
解:混合系:W = (3m + 2j)-(3g + 2h + b)m=1(FGHIJ),j=5(A、B、C、D、E) ,g=0,h=0,b=10(链杆)+6(支杆)=16W = (3m + 2j)-(3g + 2h + b)=3×1+2×5-16=-3构造分析:在刚片FGHIJ的基础上增加二元体得到整个体系有多个三个多余约束的几何不变体系。
2、试求图示体系的计算自由度,并进行几何构造分析。
解:(1)求解W 按照刚片系计算:W = 3m - 2h - 3g - bm=9 h=12 g=0 b=0W = 3m - 2h - 3g - b =3×9-2×12=3(2)构造分析。
如图所示三刚片连接。
三铰不共线组成几何不变体系且无多余约束。
3、试求图示体系的计算自由度,并进行几何构造分析。
解:(1)计算W:W = (3m + 2j)-(3g + 2h + b)m=1(FGHIJ),j=5(A、B、C、D、E) ,g=0,h=0,b=10(链杆)+6(支杆)=16W = (3m + 2j)-(3g + 2h + b)=3×1+2×5-16=-3(2)结构构造分析如图示体系内部(先撤除支座及地基)由三个刚片Ⅰ、Ⅱ、Ⅲ 用三个瞬铰两两相连,且三个瞬铰在一直线上,为几何瞬变体系。
4、如图所示为三角形ABC及其他链杆所组成体系,试考察BC边上G铰不同位置与体系整体几何特性的关系,给出简要分析过程。
(a) (b)(c) (d)解:(1)观察图(a)所示体系,△BEG直接与大地固定铰支,可以将B点看做铰结点,则BE,BG为链杆,因此,与大地直接相连的约束多余三根支杆,所以将大地必须看做是一个刚片。
BG和CD与GC相连,BE和A支座与△AEF相连,通过“找对家”的思路可以找到如图所示三刚片。
G铰位于BC中间时,三虚铰共线,组成瞬变体系。
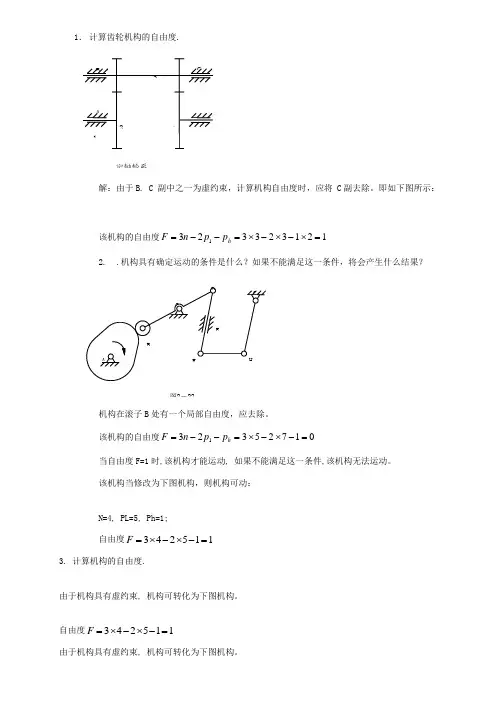
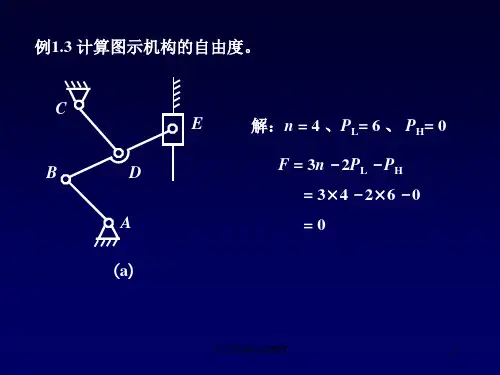
1. 计算齿轮机构的自由度.
解:由于B. C 副中之一为虚约束,计算机构自由度时,应将 C 副去除。
即如下图所示:
该机构的自由度1213233231=⨯-⨯-⨯=--=h p p n F
2. .机构具有确定运动的条件是什么?如果不能满足这一条件,将会产生什么结果?
机构在滚子B 处有一个局部自由度,应去除。
该机构的自由度017253231=-⨯-⨯=--=h p p n F
当自由度F=1时,该机构才能运动, 如果不能满足这一条件,该机构无法运动。
该机构当修改为下图机构,则机构可动:
N=4, PL=5, Ph=1;
自由度342511F =⨯-⨯-=
3. 计算机构的自由度.
由于机构具有虚约束, 机构可转化为下图机构。
自由度342511F =⨯-⨯-=
由于机构具有虚约束, 机构可转化为下图机构。
定轴轮系 A
B C
1 2
3
4 图2-22
F=⨯-⨯=
自由度31211
由于机构具有虚约束, 机构可转化为下图机构。
F=⨯-⨯=
自由度33241。
1. 对于一个简单的平面桁架结构,若共有6个节点和10根构件,那么其自由度为多少?- A. 6- B. 8- C. 10- D. 122. 在一个平面梁结构中,每个支座具有多少个约束?- A. 1- B. 2- C. 3- D. 43. 计算一个刚性连接的平面框架结构的自由度时,若结构有8个节点和12根构件,自由度公式为:自由度 = 3n - 2j,其中n是节点数,j是构件数。
该结构的自由度是多少?- A. 4- B. 6- C. 8- D. 104. 一个平面结构中,假设有4个节点,6根构件,所有构件都在一个平面上,计算其自由度时需考虑:- A. 3自由度每节点,减去2自由度每构件- B. 2自由度每节点,减去1自由度每构件- C. 2自由度每节点,减去2自由度每构件- D. 3自由度每节点,减去1自由度每构件5. 对于一个三维空间的桁架结构,若有10个节点和20根构件,其自由度计算应使用的公式是:- A. 自由度 = 6n - 3j- B. 自由度 = 3n - 2j- C. 自由度 = 3n - 3j- D. 自由度 = 6n - 6j6. 在平面框架结构中,如果节点数为5,构件数为8,计算其自由度时,正确的自由度为: - A. 6- B. 8- C. 10- D. 127. 对于一个有10个节点和15根构件的平面结构,其自由度为:- A. 15- B. 18- D. 248. 一个简单的平面框架结构中有6个节点,8根构件,计算自由度时,如果框架是完全支撑的,结果是:- A. 3- B. 6- C. 9- D. 129. 对于一个空间框架结构,其中有5个节点和12根构件,计算自由度时所用的公式为: - A. 自由度 = 6n - 3j- B. 自由度 = 3n - 2j- C. 自由度 = 6n - 2j- D. 自由度 = 3n - 3j10. 若一个平面结构中节点数为7,构件数为10,且结构为刚性框架,计算其自由度时,结果为:- A. 5- B. 7- C. 9- D. 11。
自由度计算习题一、自由度的概念在统计学中,自由度是指数据集中独立或可自由变化的变量的数量。
它在统计推断和假设检验中起着重要的作用,用于衡量数据集中的信息量。
计算自由度可以帮助我们确定合适的统计分布和进行正确的假设检验。
本文将介绍一些关于自由度计算的习题,以帮助读者更好地理解和应用自由度的概念。
二、习题一:独立样本 t 检验某研究人员对两组学生进行了一项实验,旨在比较两组学生的成绩是否存在显著差异。
数据如下表所示:组别样本数量平均值标准差A307510B308012现在,我们需要计算独立样本 t 检验时的自由度。
根据独立样本 t 检验的自由度公式,自由度为两组样本数量之和减去2:dd=d1+d2−2其中,d1和d2分别表示两组样本数量。
对于这个例子,在第一组和第二组样本数量均为30,因此自由度为:dd=30+30−2=58三、习题二:相关样本 t 检验某医院的研究人员对某种新药物的疗效进行了研究。
他们测试了同一组患者在服用该药物前后的血压,并记录了数据。
下表是服药前后每个患者的血压数据:患者服药前血压服药后血压11401302150135316015041351305145140现在,我们需要计算相关样本 t 检验时的自由度。
根据相关样本 t 检验的自由度公式,自由度为样本数量减去1:dd=d−1对于这个例子,样本数量为5,因此自由度为:dd=5−1=4四、习题三:卡方检验某调查机构随机抽取了100个人,调查了他们喜欢的颜色,并将结果列在下表中:颜色人数红色30黄色25蓝色20绿色25现在,我们需要计算卡方检验时的自由度。
根据卡方检验的自由度公式,自由度为 (行数-1) 乘以 (列数-1):$$ df = (r - 1) \\times (c - 1) $$其中,d表示行数,d表示列数。
对于这个例子,行数为4,列数为1,因此自由度为:$$ df = (4 - 1) \\times (1 - 1) = 3 \\times 0 = 0 $$五、习题四:方差分析某研究人员对三组学生进行了一项实验,旨在比较三个组别的成绩是否存在显著差异。

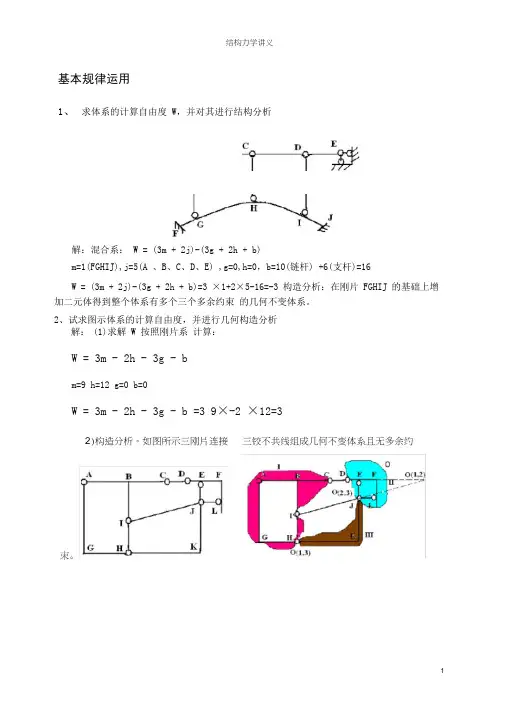
基本规律运用1、求体系的计算自由度 W,并对其进行结构分析解:混合系: W = (3m + 2j)-(3g + 2h + b)m=1(FGHIJ),j=5(A 、B、C、D、E) ,g=0,h=0,b=10(链杆) +6(支杆)=16W = (3m + 2j)-(3g + 2h + b)=3 ×1+2×5-16=-3 构造分析:在刚片 FGHIJ 的基础上增加二元体得到整个体系有多个三个多余约束的几何不变体系。
2、试求图示体系的计算自由度,并进行几何构造分析解:(1)求解 W 按照刚片系计算:W = 3m - 2h - 3g - bm=9 h=12 g=0 b=0W = 3m - 2h - 3g - b =3 9×-2 ×12=32)构造分析。
如图所示三刚片连接三铰不共线组成几何不变体系且无多余约3、试求图示体系的计算自由度,并进行几何构造分析解:(1) 计算 W:W = (3m + 2j)-(3g + 2h + b)m=1(FGHIJ),j=5(A 、B、C、D、E) ,g=0,h=0,b=10(链杆) +6(支杆)=16W = (3m + 2j)-(3g + 2h + b)=3 ×1+2×5-16=-3(2) 结构构造分析如图示体系内部(先撤除支座及地基)由三个刚片Ⅰ、Ⅱ、Ⅲ 用三个瞬铰两两相连,且三个瞬铰在一直线上,为几何瞬变体系。
4、如图所示为三角形 ABC及其他链杆所组成体系,试考察 BC边上 G铰不同位置与体系整体几何特性的关系,给出简要分析过程。
(a) (b)(c) (d)解:(1)观察图( a)所示体系,△ BEG直接与大地固定铰支,可以将 B点看做铰结点,则 BE,BG为链杆,因此,与大地直接相连的约束多余三根支杆,所以将大地必须看做是一个刚片。
BG和 CD与 GC相连, BE和 A支座与△ AEF相连,通过“找对家”的思路可以找到如图所示三刚片。
自由度计算例题在统计学中,自由度(degrees of freedom)是指用于衡量一个估计值或统计量的可自由变动的样本数量。
它是衡量样本数据中信息的度量。
自由度的计算方式因统计问题的不同而异。
下面我们来看一个自由度计算的例题:假设有一个实验,需要将一批样本分成两组,分别为甲组和乙组。
我们需要研究两组样本在某个特定因素上的差异。
首先,我们需要确定一些基本信息。
设甲组的样本数量为n1,乙组的样本数量为n2。
那么,甲组的自由度为n1-1,乙组的自由度为n2-1。
接下来,我们需要考虑合并两组样本的情况。
当我们将两组样本进行合并时,合并后的总样本数量为n1 + n2。
对于这种情况,总的自由度为(n1 + n2)-1。
此外,在某些情况下,我们还需要考虑到样本之间的相关性。
假设两组样本是相关的,那么在计算自由度时需要考虑到相关样本的数量。
具体计算方式根据实际情况而定。
以下是一个示例:假设甲组的样本数量为10,乙组的样本数量为8。
我们需要计算出甲组和乙组的自由度以及合并后总的自由度。
甲组的自由度 = 10 - 1 = 9乙组的自由度 = 8 - 1 = 7合并后总的自由度 = (10 + 8) - 1 = 17通过以上计算,我们得出了甲组、乙组以及合并后所得到的总的自由度。
自由度是统计学中一个重要的概念,它可以帮助我们更准确地评估样本数据的差异和变动情况。
在实际的统计分析中,我们需要根据具体情况灵活地计算自由度,以获得更可靠的结果。
总结起来,自由度是用于衡量样本数据中信息的度量,其计算方式根据不同统计问题的需求而异。
在计算自由度时,我们需要考虑到样本的数量、样本之间的相关性等因素,以获得准确的计算结果。
通过对自由度的合理计算,我们可以更准确地评估样本数据的变异程度,进而进行统计推断、假设检验等相关分析。
1 指出图示机构中的复合铰链、局部自由度和虚约束,并计算机构自由度。
解:第2、3、4三个构件构成2个回转付。
(这是复合铰链)构件6、7构成一个回转付。
加上A、B、D三处三个回转付总共6个回转付。
构件4和机架,3和5各构成一个移动付。
构件7和机架,6和5各构成一个移动付共有4个移动付。
共计有10个低付,没有高付。
∴共有8个构件,其中7个活动件。
n=7由计算自由度的公式:F=3n-2-=3*7-2*10-0=1∴该机构的自由度为1。
即只要一个原动件,机构即可有确定的运动。
2 求机构的自由度,并判断机构是否有确定的相对运动。
解:构件3、4、5构成2个回转付共7个回转付,2个移动付。
=7+2=9一个高付PH=1。
(凸轮与滚子从动件接触处)n=7∴F=3n-2- =3*7-2*9-1=2该机构自由度为2∴必须要有二个主动件,机构才能有确定的运动。
3、计算图示机构的自由度,并判断机构是否具有确定的运动。
(作业)(如有复合铰链、虚约束、局部自由度须指出)4、计算如图所示机构的自由度(若有复合铰链、局部自由度、虚约束必须明确指出)(作业)5. 在图示机构中, 已知 ω110= rad/s , l l l AB BC BD ===01. m 。
用图解法求 v D以及全部瞬心。
(本题10分)(作业)(1) 求 v DQ r r rv v v C B C B 22=+,v l B AB ==⨯=ω110011. m/sr r rv v v C C C C 2323=+, v C 30=∴=+r r rv v v C C B C B 232作 速 度 多 边 形, 利 用 影 像 法 求 d ,v v D B =≈21414. m/s(瞬心。
略)。
1、计算图示机构的自由度(如有复合铰链、局部自由度或虚约束,应在图上标出)。
图b中,C、F的导路在图示位置相互平行。
答案(1) 图 aB、C处为复合铰链F n p p=--=⨯-⨯=323102142L H(2) 图bC (或F) 为虚约束。
F n p p=--=⨯-⨯=3234252L H2、试分析下图所示的系统,计算其自由度,说明是否能运动?若要使其能动,并具有确定运动,应如何办?在计算中,如有复合铰链、局部自由度和虚约束,应说明。
图中箭头表示原动件。
图b中各圆为齿轮。
答案(1) 图a,滚子B处有局部自由度,E或F为虚约束,故n p p===341,,,L HF n p p =--32L H =⨯-⨯-= 332410不能运动,故不是机构。
可增加一个构件和一个低副,如解答中图a , 这时n p p===451,,,L HF n p p=--=⨯-⨯-=32342511L H(2)图b,A、B处为复合铰链,D或E为虚约束,故n p p===672,,L HF n p p =--32L H =⨯-⨯-=362722故 可 动, 但 因 只 有 一 个 原 动 件, 所 以 运 动 不 确 定。
修 改 方 法:(a) 可 增 加 一 个 原 动 件, 如 认 为 杆3 亦 为 原 动 件。
(b) 减 少 一 个构 件 和 一 个 低 副, 仍 用 一 个 原 动 件, 如 认 为 杆3 和 轮1 为 一 个 构 件 ( 图 b), 这 时n p p ===562,,,L HF n p p =--32L H =⨯-⨯-=352621注: 修 正 办 法 还 有 多 种。
3,计算下列机构的自由度。
如有复合铰链、局部自由度和虚约束,必须注明。
图b 中两圆为齿轮,导路F 垂直于AE 。
答案(1) 图aA 处 为 复 合 铰 链。
F n p p =--=⨯-⨯-=3231021402L H(2) 图bBC 杆 引 入 虚 约 束, 应 去 除。
自由度计算例题在机械原理、结构力学等工程学科中,自由度的计算是一个非常重要的概念。
它能够帮助我们理解和分析物体或系统的运动可能性,为设计和优化提供关键的依据。
下面,我们通过几个具体的例题来深入理解自由度的计算。
首先,来看一个简单的平面机构。
假设有一个四杆机构,由四个杆件通过转动副连接而成。
我们知道,在平面中,每个杆件具有 3 个自由度,即沿 x 轴和 y 轴的移动以及绕 z 轴的转动。
但由于每个转动副都限制了 2 个自由度,所以对于这个四杆机构,总共有 4 个杆件,原本的自由度数为 4×3 = 12。
而有 4 个转动副,每个转动副限制 2 个自由度,共限制了 4×2 = 8 个自由度。
那么,这个四杆机构的自由度 F= 12 8 = 4。
这意味着这个机构在平面内有 4 种独立的运动方式。
再来看一个稍微复杂一些的例子。
假设有一个平面滑块机构,由一个滑块在平面上沿着一个固定的导轨滑动,同时通过转动副与一个杆件相连,杆件的另一端通过转动副固定在平面上。
滑块在平面上原本有 3 个自由度,但由于受到导轨的限制,只能沿着导轨方向移动,所以自由度减少为 1。
杆件有 3 个自由度,两个转动副各限制 2 个自由度,总共限制 4 个自由度。
所以,这个平面滑块机构的自由度 F = 1 + 3 4 = 0。
这表示这个机构的运动是完全确定的,没有自由度。
接下来,考虑一个空间机构的例子。
假设有一个空间四连杆机构,每个杆件在空间中原本具有 6 个自由度(沿 x、y、z 轴的移动和绕 x、y、z 轴的转动)。
四个杆件原本的自由度数为 4×6 = 24。
而每个转动副限制 5 个自由度,这里有 4 个转动副,共限制 4×5 = 20 个自由度。
所以,这个空间四连杆机构的自由度 F = 24 20 = 4。
这说明该空间机构在空间中有 4 种独立的运动方式。
再看一个更复杂的空间组合机构。
假设由两个空间四连杆机构通过一个滑动副连接在一起。
1. 计算齿轮机构的自由度.
解:由于 B. C 副中之一为虚约束,计算机构自由度时,
应将 C 副去除。
即如下图所示:
该机构的自由度1213233231=⨯-⨯-⨯=--=h p p n F
2. .机构具有确定运动的条件是什么如果不能满足这一条件,将会产生什么结果
机构在滚子B 处有一个局部自由度,应去除。
该机构的自由度017253231=-⨯-⨯=--=h p p n F
当自由度F=1时,该机构才能运动, 如果不能满足这一条
件,该机构无法运动。
该机构当修改为下图机构,则机构可动:
N=4, PL=5, Ph=1;
自由度342511
F=⨯-⨯-=
3. 计算机构的自由度.
1)由于机构具有虚约束, 机构可转化为下图机构。
自由度342511
F=⨯-⨯-=
2)由于机构具有虚约束, 机构可转化为下图机构。
自由度31211
F=⨯-⨯=
3)由于机构具有虚约束, 机构可转化为下图机构。
自由度33241
F=⨯-⨯=。