基于余弦算法的足球机器人路径规划
- 格式:pdf
- 大小:147.41 KB
- 文档页数:3
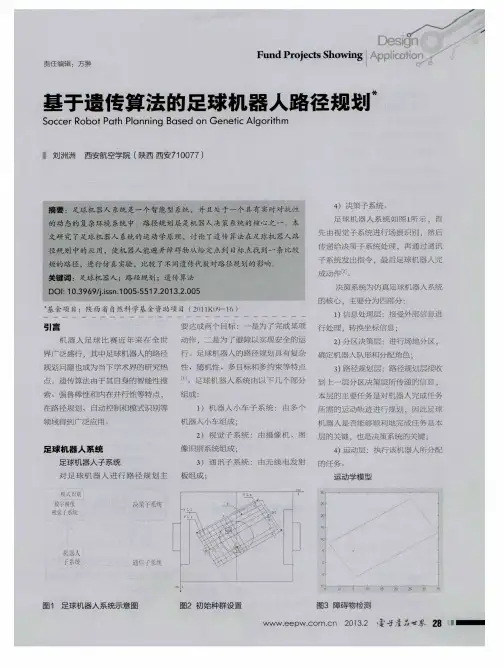
机器人足球足球机器人的路径规划方法在当今科技飞速发展的时代,机器人足球作为一个充满挑战和创新的领域,吸引了众多研究者的目光。
而在机器人足球比赛中,足球机器人的路径规划方法至关重要,它直接影响着机器人的表现和比赛的胜负。
路径规划,简单来说,就是为足球机器人找到一条从当前位置到目标位置的最优或可行路径。
这可不是一件容易的事情,因为比赛场上情况复杂多变,充满了各种不确定因素。
要理解足球机器人的路径规划,首先得考虑比赛场地的环境。
想象一下,一个标准的机器人足球场地,有边界、球门、其他机器人等各种障碍物。
足球机器人需要在不碰撞这些障碍物的前提下,快速准确地到达指定位置。
这就要求路径规划算法能够对场地环境进行精确的建模和分析。
一种常见的路径规划方法是基于栅格法。
把比赛场地划分成一个个小栅格,每个栅格代表一个可能的位置。
通过给不同的栅格赋予不同的属性,比如可通行、不可通行等,来构建场地的模型。
然后,利用搜索算法,比如 A算法,在这个栅格地图上寻找最优路径。
A算法通过综合考虑路径的长度和预估的代价,能够有效地找到一条较优的路径。
但这种方法的缺点是,当场地较大或者栅格划分较细时,计算量会非常大,可能导致实时性不好。
另一种方法是基于人工势场法。
把比赛场地想象成一个充满了力场的空间,目标位置对机器人产生吸引力,障碍物对机器人产生排斥力。
机器人在这些力的作用下运动,从而找到一条避开障碍物到达目标的路径。
这种方法的优点是计算简单,实时性好,但也存在容易陷入局部最优解的问题,就是机器人可能会被困在某个局部区域,找不到全局最优的路径。
还有一种叫做动态窗口法的路径规划方法。
它考虑了机器人的运动学和动力学约束,通过在机器人的速度空间中进行采样和评估,找到一组在当前环境下可行且最优的速度,从而控制机器人的运动。
这种方法适用于机器人需要快速响应环境变化的情况,但对于复杂的环境建模可能不够精确。
为了提高路径规划的效果,还可以结合多种方法。
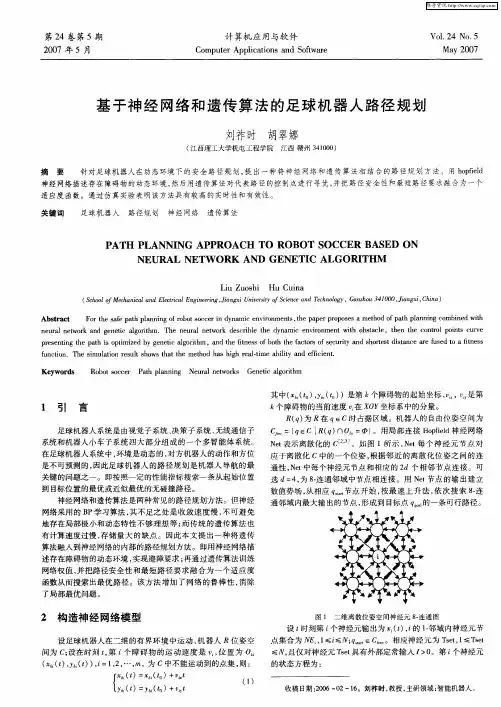
基于时间最优的足球机器人路径规划郭路生吕维先杨林权中国地质大学信息工程学院人工智能研究所,湖北武汉430074摘要:首次提出了一种基于时间最优的足球机器人的路径规划的方法。
该方法用平滑的Bezier曲线代替传统的折线作为路径的描述,能满足移动机器人的非完整性约束方程,并能使机器人获得较大的运动速度,然后用遗传算法对代表路径的Bezier曲线控制点进行时间寻优。
遗传算法的适应值函数充分考虑了影响机器人运动时间的三个因素:路径的安全性、长度和平滑度。
仿真结果和实际比赛表明了该方法的有效性。
关键字:时间最优路径规划Bezier曲线遗传算法A path planning approach to soccer robot based on time optimization Abstract: This paper presents a path planning approach to soccer robot based on time optimization for the first time. In order to improve the speed of robot’s movement, the path is described with a smooth Bezier curve instead of traditional broken lines, then the control points of Bezier curve presenting the path is optimized by genetic algorithm. The fitness function of the genetic algorithm takes full consideration of three factors which affect the time of robot’s movement: security, length and smoothness of the path. Results of the experiments and real match show the efficiency of the method.Key word: time optimization; path planning; Bezier curve; genetic algorithm1 引言足球机器人系统是一个典型的且非常具有挑战性的多智能体系统[1],是一个实时、动态的复杂环境。
机器人足球比赛中的定位与路径规划研究机器人足球比赛作为机器人领域的一项重要竞技活动,旨在通过自主控制的机器人进行足球比赛,展示机器人感知、决策和执行能力的综合应用。
在机器人足球比赛中,定位和路径规划是至关重要的关键技术,对机器人的移动控制和决策产生深远影响。
本文将探讨机器人足球比赛中的定位与路径规划研究,并介绍相关的理论、方法和应用。
一、定位技术在机器人足球比赛中的重要性机器人足球比赛中,准确的定位是机器人进行移动、决策和执行的基础。
传统的定位方法包括全球定位系统(GPS)、惯性导航系统(INS)和激光雷达等,但这些方法在室内环境下精度较低,且受环境干扰较大。
因此,研究者们提出了一系列基于传感器融合的定位方法,如视觉定位、机器视觉和无线传感器网络等。
这些方法通过将多种传感器的信息进行融合,提高了机器人的定位精度和鲁棒性。
二、视觉定位技术在机器人足球比赛中的应用视觉定位在机器人足球比赛中占据着重要位置。
通过利用摄像头捕捉比赛场景,机器人可以使用计算机视觉算法来进行定位。
这些算法可以提取出场地特征、球体特征和其他机器人特征,并通过比对以实现机器人的定位。
视觉定位技术不仅可以提供高精度的定位信息,还能够辅助机器人进行路线规划和对战决策。
视觉定位技术在机器人足球比赛中的应用还包括球门检测、球员检测和球的跟踪等,这些应用为机器人的定位提供了更多的信息来源。
三、路径规划技术在机器人足球比赛中的研究和应用路径规划是指机器人在比赛中根据当前位置和目标位置,确定一条最优路径用于移动的过程。
目前,机器人足球比赛中常用的路径规划算法包括最短路径算法、D*算法、A*算法和RRT算法等。
这些算法通过对比分析各种可能路径的代价,找到最优路径,以实现机器人的高效移动。
除了基本的路径规划算法外,还有一些高级算法和策略被应用于机器人足球比赛中,例如强化学习、模型预测控制和遗传算法等。
这些算法能够根据比赛情况和机器人的特性,动态调整路径,并优化机器人的决策和行动。
机器人足球比赛中的算法与模型机器人足球比赛是一项充满激情和挑战性的体育运动。
在这项运动中,机器人球员通过算法和模型的支持来进行比赛。
算法和模型是机器人足球比赛中最为重要的组成部分,它们决定了机器人球员的行为和动作。
如何设计和优化算法和模型已成为机器人足球比赛的关键问题。
1. 机器人足球比赛的算法机器人足球比赛中的算法有多种类型,包括路径规划、目标识别、动作规划和数据处理等。
这些算法通过计算机编程实现,在机器人球员中嵌入后,可以指导机器人球员执行与足球比赛相关的任务。
路径规划是机器人足球比赛中最常用的算法之一。
它为机器人球员规划最短路径,使机器人球员能够快速移动并避免碰撞。
在机器人足球比赛中,路径规划算法一般结合了感知技术和运动控制算法,实时处理机器人球员的运动轨迹,以达到最佳效果。
目标识别是另一种重要的算法。
在机器人足球比赛中,它用于识别并定位足球和其他机器人球员。
识别足球是机器人足球比赛中的一项基本任务,它可以为机器人球员提供定位和控制的依据。
如果机器人球员能够识别其他机器人球员的位置,它们就可以避免碰撞并在比赛中更好的配合。
动作规划算法可以实现机器人球员的动作规划和控制。
例如,机器人球员想要射门,就需要实现动作规划,计算出射门的力度和方向等参数。
这些参数将用于机器人球员的运动控制和执行。
数据处理是机器人足球比赛中的另一个关键算法。
它可以帮助机器人球员对传感数据和其他信息进行处理和分析。
这包括对环境信息和球员位置等数据进行分析,以帮助机器人球员做出更加明智的决策。
2. 机器人足球比赛的模型模型是机器人足球比赛中另一个重要的组成部分。
模型是对机器人球员行为和动作的描述,它们用于指导机器人球员执行比赛任务。
机器人足球比赛中最常用的两种模型是机器人模型和球场模型。
机器人模型是机器人足球比赛中最为基本的模型之一。
它描述了机器人球员的运动和行为,在路径规划、动作规划和运动控制中起着至关重要的作用。
机器人模型通常由机械结构模型、电气模型和传感器模型等组成。
自适应模糊算法优化的足球机器人轨迹跟踪YU Yangjian;RU Feng;WANG Ping;ZHANG Ni【摘要】为了提高足球机器人在运动控制过程中的轨迹跟踪性能和稳定性,将自适应模糊PID算法用于机器人运动控制环节中,对PID参数进行实时调整.建立足球机器人在场地上的控制系统模型,分析机器人在轨迹跟踪中由驱动方向、角度等时变因素导致的实际轨迹发生偏移的问题,分别在MATLAB-Sim-ulink和SimRobot 仿真平台对优化算法的性能进行仿真,同时与传统的PID控制进行对比.实验结果表明,自适应模糊PID算法相比传统的PID控制器在最大跟踪误差和平均跟踪误差方面分别减少20.18%和29.34%,同时提升了系统的稳定性.该控制算法提升了足球机器人的轨迹跟踪性能,满足机器人在运动过程中的动力学和控制要求,易于在工程中应用.【期刊名称】《机械与电子》【年(卷),期】2019(037)007【总页数】5页(P64-68)【关键词】足球机器人;运动控制;轨迹跟踪;自适应模糊PID【作者】YU Yangjian;RU Feng;WANG Ping;ZHANG Ni【作者单位】;;;【正文语种】中文【中图分类】TP273;TP2420 引言机器人领域的发展方向由单一功能的机械手向多智能自主移动机器人过渡,比如说军事行动、救援和机器人足球比赛等。
轨迹跟踪控制是移动机器人研究的热门方向。
在实际应用中,轨迹跟踪过程中出现的误差往往是多因素造成的,因此在机器人运动控制过程中不可避免地存在不确定性。
传统的移动机器人领域已经有许多研究成果。
反演法是较早用于轨迹跟踪的方法,其通过李雅普诺夫函数来构造控制器,其控制结构和设计过程较复杂,难以在实际生产中广泛应用。
滑模变结构控制方法在轨迹跟踪中也应用较多,其具有响应速度快和良好的瞬态性,但是在控制过程中会不可避免地出现“抖动”现象,影响控制系统的性能。
自适应控制可以根据系统的输入、输出、误差及性能参数,通过辨识和学习来调整性能参数,使控制系统得到改善。
机器人足球决策算法优化研究近年来,机器人足球比赛越来越受到人们的关注,越来越多的科研工作者和企业将目光投向了这个领域。
机器人足球比赛不仅是一项娱乐活动,更是一个涉及人工智能、机器人技术等多学科交叉的综合性研究领域。
其中,机器人足球决策算法的优化研究是实现赛场胜利的关键。
首先,我们需要了解什么是机器人足球?机器人足球指的是一种由硬件设备和对应软件系统组成的机器人,可以根据规则运作,足球比赛的场地是标准的足球场地,但机器人不能穿鞋,也不能踢足球,而是通过与对方机器人的交互,将足球踢进对方球门。
机器人足球的竞技形式有很多种,如:FIRA、ROBOCUP、足球机器人联赛等,每个项目的规则略有不同,但总的来说,机器人足球比赛可以帮助我们了解人工智能、机器人技术、控制技术等方面的最新发展和应用。
机器人足球决策算法的优化研究即是为了提高机器人足球队的胜率,提高机器人足球队的决策能力,使机器人足球队获得更好的比赛结果,使机器人足球成为真正意义上的人工智能。
而要实现这个目标,需要从哪几个方面入手呢?第一,目标识别。
在机器人足球比赛中,足球的位置和对方队员的位置在每一时刻都会发生变化,如何在短时间内准确地判断目标的状态,是机器人足球决策算法的关键之一。
在目标识别方面,使用计算机视觉、图像处理等技术可以辅助机器人快速、精确地获得目标信息,从而实现更精准的决策和更有效的控制。
第二,路径规划。
机器人足球比赛中,机器人需要根据足球的位置、惯性等物理参数综合计算最优路径,进而准确地抵达足球并射门。
传统的路径规划方法主要基于启发式搜索算法,但是足球场地上存在许多复杂的障碍物,路径规划困难度很大。
因此,研究人员开始探索更加智能、高效的路径规划算法,如基于深度学习的路径规划等。
第三,决策策略。
机器人足球比赛是一个多智能体博弈的过程,涉及到多方面的决策问题。
机器人足球中,机器人需要不仅可以判断足球当前的位置,还要考虑到对手位置,以及队友的位置,制定出全局最优的战略和决策方案。
如何利用余弦定理优化机器人路径规划在当今科技迅速发展的时代,机器人的应用场景日益广泛,从工业生产中的自动化装配到家庭服务中的智能清洁,机器人正逐渐融入我们的生活。
而机器人能够高效、准确地完成各种任务,很大程度上取决于其路径规划的能力。
路径规划的优劣直接影响机器人的工作效率、能源消耗以及任务完成的质量。
在众多用于优化机器人路径规划的数学工具中,余弦定理发挥着重要的作用。
首先,我们来了解一下什么是余弦定理。
余弦定理是描述三角形中三边长度与一个角的余弦值之间关系的数学定理。
对于任意一个三角形,假设其三边长度分别为 a、b、c,对应的夹角分别为 A、B、C,则有:a²= b²+ c² 2bc×cosA,b²= a²+ c² 2ac×cosB,c²= a²+ b²2ab×cosC。
那么,余弦定理如何应用于机器人路径规划呢?假设机器人需要在一个包含多个障碍物的环境中从起点移动到终点。
我们可以将机器人的位置、障碍物的位置以及目标位置看作三角形的顶点。
通过计算这些顶点之间的距离和夹角,利用余弦定理可以帮助我们预测机器人在不同路径上可能遇到的阻力和能量消耗。
在实际应用中,机器人的运动路径往往不是直线,而是需要绕过各种障碍物。
这时,我们可以将机器人的运动轨迹分解为多个小的线段,每个线段都可以看作一个三角形的边。
通过计算这些三角形的边长和夹角,利用余弦定理可以评估每条可能路径的优劣。
例如,如果两条路径的长度相近,但其中一条路径所对应的夹角较大,根据余弦定理可知,机器人在这条路径上克服阻力所需的能量可能更多。
因此,我们可以选择夹角较小的路径,以降低能量消耗,提高机器人的工作效率。
此外,余弦定理还可以用于优化机器人的转弯策略。
当机器人需要改变运动方向时,转弯的角度和半径会对其运动的平稳性和能量消耗产生影响。
基于余弦曲线的机器人移动路径自主规划
李峰;金永喆;朱文慧;李自建
【期刊名称】《机械工程师》
【年(卷),期】2024()4
【摘要】为了将余弦曲线应用于机器人路径自主规划,提高机器人路径规划智能水平,建立了余弦曲线变换模型,设计了余弦曲线路径规划算法,针对机器人的运动特点进行了机器人余弦曲线路径规划,设计了机器人余弦曲线路径规划试验。
通过仿真和试验研究得到了不同条件下机器人余弦曲线规划路径的位置、姿态,研究分析证明了模型和算法的正确性、有效性,大大提高了机器人路径规划的效率。
【总页数】5页(P24-27)
【作者】李峰;金永喆;朱文慧;李自建
【作者单位】国立群山大学机械工程学院;郑州经贸学院智慧制造学院
【正文语种】中文
【中图分类】TH17
【相关文献】
1.基于Bezier曲线模型的移动机器人路径规划算法
2.基于Bezier曲线的自主移动机器人最优路径规划
3.基于ROS的自主移动机器人路径规划虚实结合实验平台
4.基于跳点搜索-遗传算法的自主移动机器人路径规划
5.基于改进RRT^(∗)算法的机器人自主式移动路径规划研究
因版权原因,仅展示原文概要,查看原文内容请购买。
一种基于轨迹的足球检测和跟踪方案
余弦;曾贵华
【期刊名称】《计算机工程与应用》
【年(卷),期】2010(46)26
【摘要】在运动视频检测中,由于存在噪声和遮挡,仅依靠单帧信息来确认目标的位置是很困难的.提出了一种基于轨迹的运动足球检测和跟踪方案.先利用视觉特征来得到每帧图像的候选球,然后使用卡尔曼滤波器进行预测跟踪,生成初始轨迹.通过轨迹选择,确认真实球的轨迹,从而间接地得到球的位置.此外,结合卡尔曼滤波器预测和线性插值,补充视频中漏检的球的位置.实验结果表明,算法具有较高的准确性,精确率达到85%.
【总页数】4页(P148-151)
【作者】余弦;曾贵华
【作者单位】上海交通大学,电子工程系,上海,200240;上海交通大学,电子工程系,上海,200240
【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.一种基于驱动力矩的足球机器人轨迹控制方法 [J], 柳长安;刘灿伟;周宏
2.基于轨迹的足球检测与跟踪 [J], 施乐剑;于俊清;何云峰
3.一种基于预瞄控制的Robocup足球机器人带球轨迹跟踪方法 [J], 邓本再;王江
银;张中景
4.链式系统轨迹跟踪控制:一种新方案 [J], 董文杰;霍伟
5.一种基于轨迹大数据离线挖掘与在线实时监测的出租车异常轨迹检测算法 [J], 韩博洋;汪兆洋;金蓓弘
因版权原因,仅展示原文概要,查看原文内容请购买。