ADAMS参数化建模及优化设计
- 格式:ppt
- 大小:1.05 MB
- 文档页数:68
【Adams应用教程】第10章ADAMS参数化建模及优化设计第10章 ADAMS参数化建模及优化设计本章将通过一个具体的工程实例,介绍ADAMS/View的参数化建模以及ADAMS/View 提供的3种类型的参数化分析方法:设计研究(Design study)、试验设计(Design of Experiments, DOE)和优化分析(Optimization)。
其中DOE是通过ADAMS/Insight来完成,设计研究和优化分析在ADAMS/View中完成。
通过本章学习,可以初步了解ADAMS参数化建模和优化的功能。
10.1 ADAMS参数化建模简介ADAMS提供了强大的参数化建模功能。
在建立模型时,根据分析需要,确定相关的关键变量,并将这些关键变量设置为可以改变的设计变量。
在分析时,只需要改变这些设计变量值的大小,虚拟样机模型自动得到更新。
如果,需要仿真根据事先确定好的参数进行,可以由程序预先设置好一系列可变的参数,ADAMS自动进行系列仿真,以便于观察不同参数值下样机性能的变化。
进行参数化建模时,确定好影响样机性能的关键输入值后,ADAMS/View提供了4种参数化的方法:(1)参数化点坐标在建模过程中,点坐标用于几何形体、约束点位置和驱动的位置。
点坐标参数化时,修改点坐标值,与参数化点相关联的对象都得以自动修改。
(2)使用设计变量通过使用设计变量,可以方便的修改模型中的已被设置为设计变量的对象。
例如,我们可以将连杆的长度或弹簧的刚度设置为设计变量。
当设计变量的参数值发生改变时,与设计变量相关联的对象的属性也得到更新。
(3)参数化运动方式通过参数化运动方式,可以方便的指定模型的运动方式和轨迹。
(4)使用参数表达式使用参数表达式是模型参数化的最基本的一种参数化途径。
当以上三种方法不能表达对象间的复杂关系时,可以通过参数表达式来进行参数化。
参数化的模型可以使用户方便的修改模型而不用考虑模型内部之间的关联变动,而且可以达到对模型优化的目的。
RSSR机构的ADAMS参数化建模及优化技术研究CUI Suhua;ZHANG Jingmei;YANG Songlin;DING Zhaopeng【摘要】为对空间RSSR四杆机构进行优化设计,以RSSR机构为研究对象,运用解析法对RSSR机构进行了运动学分析,得出RSSR机构的运动解析式,确定曲柄存在条件的表达式;利用ADAMS软件参数化编程技术,将空间四杆机构关键点参数化,构建三维参数化模型;运用ADAMS软件的二次开发技术,开发了空间RSSR四杆机构的参数化建模及分析优化系统,实现了RSSR机构运动类型的判定、快速建模、机构仿真、运动分析及优化;最后,进行了实例分析.结果表明,对于给定的RSSR机构,系统运动分析优化后,摇杆的角速度、角加速度的最大值和最小值的绝对值明显减小,摇杆摆动速度趋于平稳.研究结果对提高RSSR机构的设计效率、减少设计周期具有参考价值.【期刊名称】《河北工业科技》【年(卷),期】2019(036)001【总页数】6页(P9-14)【关键词】计算机辅助设计;ADAMS;RSSR;参数化建模;优化设计【作者】CUI Suhua;ZHANG Jingmei;YANG Songlin;DING Zhaopeng【作者单位】【正文语种】中文【中图分类】TH112;TH113.2在工业机械中,空间连杆机构比平面杆机构具有更紧凑的结构外形、更复杂的运动形式,可用更少构件实现复杂多样的空间轨迹,工作可靠性更高[1-3],应用范围广泛。
如剑织机的引纬机构,飞机中的升降舵传动机构、副翼操纵机构等。
含有首末2个转动副和中间2个球面副的空间四杆机构一般用RSSR表示。
近20年,关于空间RSSR四杆机构的研究方法主要有矢量法、解析法、方向余弦矩阵法、复数法、图解法等[4-7]。
图解法需从三维到二维投影变换,作图复杂,在二维平面内难以完整表达机构的三维几何信息,准确性差[8]。
解析法需运用向量或矩阵等数学工具,计算量大,计算机编程复杂[9]。
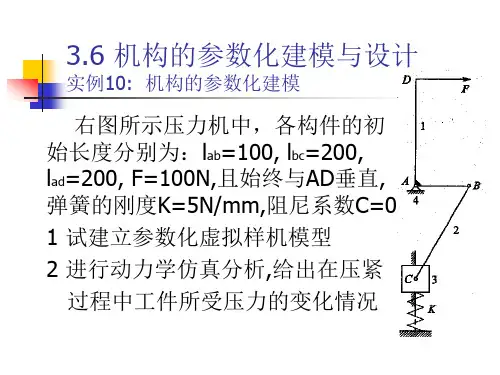
Adams参数化与优化分析经典案例在机械产品设计进程中,有各种各样的性能指标,甚至有些指标是相互制约的,因此很难通过一次设计就得到满意的结果。
以往采用的手动修改方法费时费力,浪费资源。
使用Adams软件,用户可以通过参数化及优化功能自动完成机械系统的设计,得出最优化的方案,大大提高设计效率。
参数化和优化是用户关注度最高的功能之一,但在Adams基本包的官方培训教程中没作重点介绍。
本期信工诚向大家分享一个参数化与优化方面的经典案例,帮助大家尽快熟悉这一功能。
案例摘自陈志伟编著的《MSC Adams多体动力学仿真基础与实例解析》一书中的第七章。
问题描述:小球在一定倾角的斜板上在重力作用下滑落,研究该倾角为多少时可以顺利通过预先设置的圆环中心。
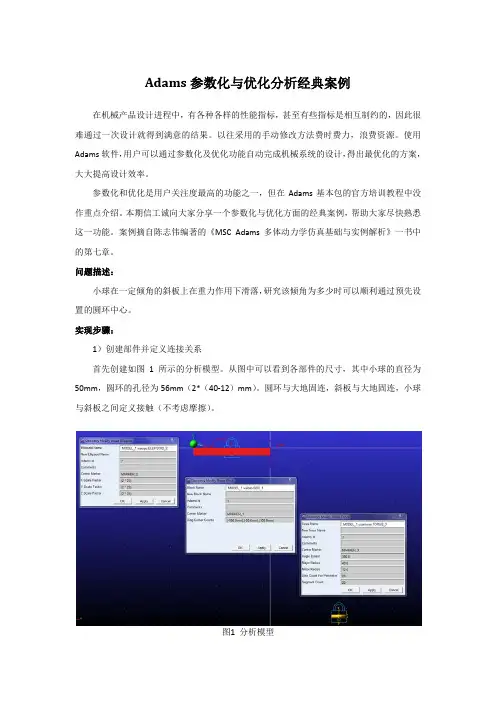
实现步骤:1)创建部件并定义连接关系首先创建如图1所示的分析模型。
从图中可以看到各部件的尺寸,其中小球的直径为50mm,圆环的孔径为56mm(2*(40-12)mm)。
圆环与大地固连,斜板与大地固连,小球与斜板之间定义接触(不考虑摩擦)。
图1 分析模型2)参数化模型模型参数化分为两步,第一步定义设计变量,第二步将现有模型数据用设计变量替换,实现模型参数化。
本例需要定义一个独立变量(斜板角度)和两个非独立变量(小球X坐标和Y坐标)。
斜板角度参数化如图2所示,小球坐标参数化如图3所示。
图2 斜板角度参数化图3 小球坐标参数化参数化后将斜板角度初始值改为-10,检查修改后的模型显示是否正确。
如果所有的参数定义都正确的话,修改后的模型显示效果会如图4所示。
图4 修改斜板初始角度3)定义优化目标我们的设计目标是让小球穿过圆环,但这不是软件能读懂的机器语言。
这里我们可以建立一个小球中心Marker点和圆环中心Marker的“点的点对点测量”,以测量结果的最小值作为优化目标,当测量结果的最小值小于3mm(圆环孔半径与小球半径之差)即代表小球穿过圆环。
建立好测量后运行一次2秒200步的仿真,并查看测量结果。

第10章 ADAMS参数化建模及优化设计本章将通过一个具体的工程实例,介绍ADAMS/View的参数化建模以及ADAMS/View提供的3种类型的参数化分析方法:设计研究(Design study)、试验设计 (Design of Experiments, DOE)和优化分析(Optimization)。
其中DOE是通过ADAMS/Insight来完成,设计研究和优化分析在ADAMS/View中完成。
通过本章学习,可以初步了解ADAMS参数化建模和优化的功能。
10.1 ADAMS参数化建模简介ADAMS提供了强大的参数化建模功能。
在建立模型时,根据分析需要,确定相关的关键变量,并将这些关键变量设置为可以改变的设计变量。
在分析时,只需要改变这些设计变量值的大小,虚拟样机模型自动得到更新。
如果,需要仿真根据事先确定好的参数进行,可以由程序预先设置好一系列可变的参数,ADAMS自动进行系列仿真,以便于观察不同参数值下样机性能的变化。
进行参数化建模时,确定好影响样机性能的关键输入值后,ADAMS/View提供了4种参数化的方法:(1)参数化点坐标在建模过程中,点坐标用于几何形体、约束点位置和驱动的位置。
点坐标参数化时,修改点坐标值,与参数化点相关联的对象都得以自动修改。
(2)使用设计变量通过使用设计变量,可以方便的修改模型中的已被设置为设计变量的对象。
例如,我们可以将连杆的长度或弹簧的刚度设置为设计变量。
当设计变量的参数值发生改变时,与设计变量相关联的对象的属性也得到更新。
(3)参数化运动方式通过参数化运动方式,可以方便的指定模型的运动方式和轨迹。
(4)使用参数表达式使用参数表达式是模型参数化的最基本的一种参数化途径。
当以上三种方法不能表达对象间的复杂关系时,可以通过参数表达式来进行参数化。
参数化的模型可以使用户方便的修改模型而不用考虑模型部之间的关联变动,而且可以达到对模型优化的目的。
参数化机制是ADAMS中重要的机制。

ADAMS/VIEW 参数化和优化设计实例详解本例通过小球滑落斜板模型,着重详细说明参数化和优化设计的过程.第一步,启动adams/view(2014版),设置工作路径,设置名称为incline。
名称存储路径第二部,为满足模型空间,设置工作网格如图参数.修改尺寸第三部创建斜板。
点击Bodies选项卡,选择BOX,然后建模区点击鼠标右键,分别设置两个点,坐标为(0,0,0)和(—500,-50,0),创建完模型,然后右键Rename,修改名称为xieban.BOX右键输入坐标,创建点rename输入xieban第四部创建小球.点击Bodies选项卡,选择Sphere,然后建模区点击鼠标右键,分别设置两个点,球心坐标为(-500,50,0)和半径坐标(—450,50,0),创建完模型,然后右键Rename,修改名称为xiaoqiu。
输入两点Rename,及创建效果第五部创建圆环.点击Bodies选项卡,选择Torus,然后建模区点击鼠标右键,分别设置两个点,圆环中心坐标为(450,—1000,0)和大径坐标(500,—1000,0),创建完模型,然后右键Rename,修改名称为yuanhuan。
完成后效果如下图:第六部修改小球尺寸及位置.首先修改小球半径为25mm,在小球上右键,选择球体,点击Modify,然后设置如下图;然后修改小球位置,将Y坐标移到25mm处,选择Marker_2点,右键点击Modify,然后设置坐标位置如下图.右键编辑球半径修改半径为25改后效果修改球的位置设置球坐标完成修改后效果第七部修改圆环尺寸及位置。
将圆环绕X轴旋转90度,选择Marker_3点,右键点击Modify,然后设置坐标位置如下图。
修改圆环尺寸,大径为40mm,截面圆环半径为12mm,右键,选择圆环体,点击Modify ,然后设置如下图。
至此,模型建立完毕.修改圆环位置位置坐标修改圆环尺寸圆环尺寸设置第八步,创建模型连接关系,斜板与大地间定义固定副,附着点为斜板中心;圆环与大地定义固定副,附着点为圆环中心;小球与斜板间定义接触,单击Forces块中的Contact,打开接触定义对话框,按图设置。
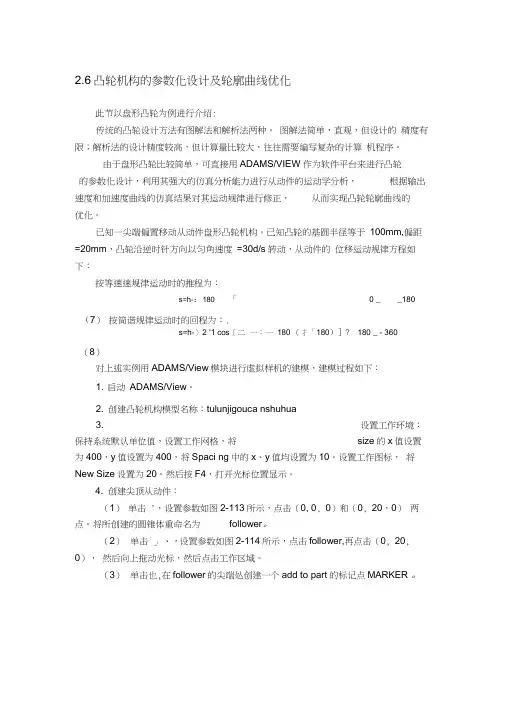
2.6凸轮机构的参数化设计及轮廓曲线优化此节以盘形凸轮为例进行介绍:传统的凸轮设计方法有图解法和解析法两种。
图解法简单,直观,但设计的精度有限;解析法的设计精度较高,但计算量比较大,往往需要编写复杂的计算机程序。
由于盘形凸轮比较简单,可直接用ADAMS/VIEW 作为软件平台来进行凸轮的参数化设计,利用其强大的仿真分析能力进行从动件的运动学分析,根据输出速度和加速度曲线的仿真结果对其运动规律进行修正,从而实现凸轮轮廓曲线的优化。
已知一尖端偏置移动从动件盘形凸轮机构。
已知凸轮的基圆半径等于100mm,偏距=20mm,凸轮沿逆时针方向以匀角速度=30d/s转动,从动件的位移运动规律方程如下:按等速速规律运动时的推程为:s=h-:180 「0 _ _180(7)按简谐规律运动时的回程为:.s=h-〉2 ‘1 cos[二一:一180 (扌「180)]? 180 _ - 360(8)对上述实例用ADAMS/View模块进行虚拟样机的建模,建模过程如下:1. 启动ADAMS/View。
2. 创建凸轮机构模型名称:tulunjigouca nshuhua3. 设置工作环境:保持系统默认单位值,设置工作网格,将size的x值设置为400,y值设置为400,将Spaci ng中的x、y值均设置为10。
设置工作图标,将New Size设置为20。
然后按F4,打开光标位置显示。
4. 创建尖顶从动件:(1)单击 ',设置参数如图2-113所示,点击(0, 0, 0)和(0, 20,0)两点。
将所创建的圆锥体重命名为follower。
(2)单击:」、,设置参数如图2-114所示,点击follower,再点击(0, 20,0),然后向上拖动光标,然后点击工作区域。
(3)单击也,在follower的尖端处创建一个add to part的标记点MARKER 。
,将follower 的尖端移动到(20, 98, 0)处。
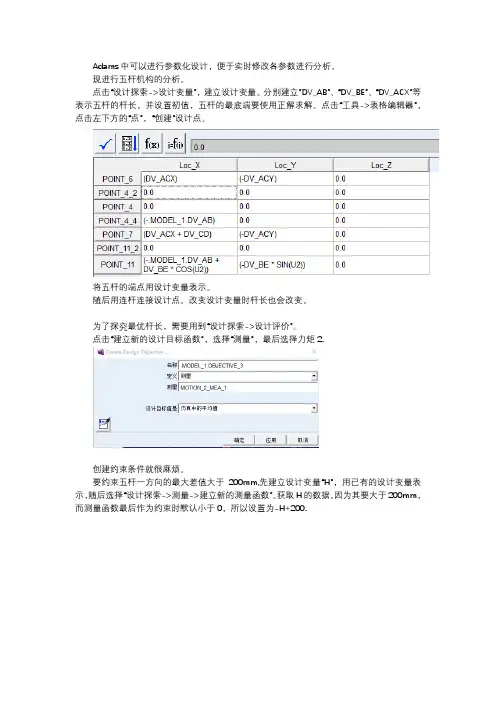
Adams中可以进行参数化设计,便于实时修改各参数进行分析。
现进行五杆机构的分析。
点击“设计探索->设计变量”,建立设计变量。
分别建立”DV_AB”、“DV_BE”、“DV_ACX”等表示五杆的杆长,并设置初值,五杆的最底端要使用正解求解。
点击“工具->表格编辑器”,点击左下方的“点”,“创建”设计点。
将五杆的端点用设计变量表示。
随后用连杆连接设计点。
改变设计变量时杆长也会改变。
为了探究最优杆长,需要用到“设计探索->设计评价”。
点击“建立新的设计目标函数”,选择“测量”,最后选择力矩2.
创建约束条件就很麻烦。
要约束五杆一方向的最大差值大于200mm,先建立设计变量“H”,用已有的设计变量表示,随后选择“设计探索->测量->建立新的测量函数”。
获取H的数据。
因为其要大于200mm,而测量函数最后作为约束时默认小于0,所以设置为-H+200.
随后点击“设计评价->创建约束条件函数”,设置如下:
随后点击“设计评价->设计评价工具”,设置如下:
点击开始即开始优化设计。
2018-11-29。
第10章 ADAMS参数化建模及优化设计本章将通过一个具体的工程实例,介绍ADAMS/View的参数化建模以及ADAMS/View 提供的3种类型的参数化分析方法:设计研究(Design study)、试验设计((Design of Experiments, DOE)和优化分析(Optimization)。
其中DOE是通过ADAMS/Insight来完成,设计研究和优化分析在ADAMS/View中完成。
通过本章学习,可以初步了解ADAMS参数化建模和优化的功能。
10.1 ADAMS参数化建模简介ADAMS提供了强大的参数化建模功能。
在建立模型时,根据分析需要,确定相关的关键变量,并将这些关键变量设置为可以改变的设计变量。
在分析时,只需要改变这些设计变量值的大小,虚拟样机模型自动得到更新。
如果,需要仿真根据事先确定好的参数进行,可以由程序预先设置好一系列可变的参数,ADAMS自动进行系列仿真,以便于观察不同参数值下样机性能的变化。
进行差数参数化建模时,在确定好影响样机性能的关键输入值后,ADAMS/View提供了4种参数化的方法:(1)参数化点坐标在建模过程中,点坐标用于几何形体、约束点位置和驱动的位置。
点坐标参数化时,修改点坐标值时,与参数化点相关联的对象都得以自动修改。
(2)使用设计变量通过使用设计变量,可以方便的修改模型中的以已被设置为设计变量的对象。
例如,我们可以将连杆的长度或弹簧的刚度设置为设计变量。
当设计变量的参数值发生改变时,与设计变量相关联的对象的属性也得到更新。
(3)参数化运动方式通过参数化运动方式,可以方便的指定模型的运动方式和轨迹。
(4)使用参数表达式使用参数表达式是模型参数化的最基本的一种参数化途径。
当以上三种方法不能表达对象间的复杂关系时,可以通过参数表达式来进行参数化。
参数化的模型可以使用户方便的修改模型而不用考虑模型内部之间的关联变动,而且可以达到对模型优化的目的。
参数化机制是ADAMS中重要的机制。
第四章仿真模型的建立第四章仿真模型的建立根据多刚体系统动力学理论,ADAMS软件中包含进行机械系统仿真分析所需的各种库。
例如:约束库一将实际机械系统中的运动副进行抽象,包括理想铰链(Idealizedjoints)、原始铰链(Jointprimitives)、运动发生器(Motionsgenerators)、联合铰链(AssociativeConstraints)以及二维曲线约束(Two.-dimensionalcurveconstraints)。
在课题研究中,利用ADAMS软件提供的构件库、约束库以及力库,建立了用以研究定位参数和转向机构各种性能的烛式悬架一转向机构力学模型,4.1烛式悬架结构及运动特-陛汽车悬架的形式分为非独立悬架和独立悬架两种:非独立悬架的车轮装在一根整体车轴的两端,当一边车轮跳动时,影响另~侧车轮也作相应的跳动,使整个车身振动或倾斜,汽车的平稳性和舒适性较差,但由于构造较简单,承载力大在行驶中始终保持贴地状态,轮胎的附着力较强,磨损较均匀。
独立悬架的车轴分成两段,每只车轮用螺旋弹簧独立地安装在车架(或车身)下面,当一边车轮发生跳动时,另一边车轮不受波及,汽车的平稳性和舒适性好。
前轮采用独立式悬挂,可以便发动机的位置降低和前移,整车重心得以下降,提高汽车的行驶稳定性。
但这种悬架构造较复杂,承载力小,同时由于车轮外倾角与轮距变化较大,轮胎磨损较严重。
烛式悬架又称改进的麦弗逊式悬架,如图4-1所示,主销刚性地固定在悬架上,转向节与套筒4连接在一起。
当车轮跳动时,转向节与套筒一起沿主销轴线移动。
这种悬架对于转向轮来说,在恳架变形时,主销的定位角不会发生变化,仅轮距、轴距稍有改变,因此有卜丰销:2一防层罩;3一车利于汽车的转向操纵和行驶稳定性。
但是侧向力全部由架;4一套筒:5一防层罩:套在主销l上的长套筒4和主销承受,则套筒与主销之6一减振器;7一通气管;间的磨擦阻力大,磨损严重。
ADAMSVIEW参数化和优化设计实例详解参数化和优化设计是软件工程中的两个重要概念,它们可以帮助开发人员提高代码的可读性、可维护性和性能。
本文将详细介绍参数化和优化设计的概念,并通过一个实例加以说明。
参数化是一种将特定的值提取为参数的技术。
在编程中,我们经常需要使用一些固定的值,比如常量或者特定的配置参数。
将这些值直接写入代码中,会导致代码的可读性和可维护性变差。
而通过参数化,我们可以将这些值提取为参数,使得代码更加灵活和可复用。
例如,我们在编写一个计算圆面积的函数时,可以将圆的半径作为参数传递给函数,而不是将半径的具体值直接写在函数中。
这样,我们可以在不改变函数实现的情况下,重复使用这个函数来计算不同半径的圆的面积。
除了提高代码的可读性和可维护性外,参数化还可以提高代码的灵活性。
通过将固定值作为参数,我们可以在不改变函数实现的情况下,根据不同的需求动态调整这些参数的值,从而实现不同的功能。
这种灵活性在开发过程中非常有用,特别是当我们需要处理多种不同情况时。
优化设计是指对代码进行优化以提高性能的过程。
在开发过程中,我们经常会遇到一些性能瓶颈,比如运行时间过长、内存占用过大等问题。
通过优化设计,我们可以对代码进行改进,以提高性能,让程序更加高效地运行。
优化设计的实现可以有很多方法,比如减少循环次数、使用更高效的算法、合理利用缓存等。
优化设计并不是一蹴而就的过程,它需要依赖大量的测试和实验来验证不同的改进方法的效果。
因此,在进行优化设计时,我们不应该盲目地追求性能,而是应该基于实际情况和需求,寻找合适的优化方案。
下面通过一个具体的实例来说明参数化和优化设计的应用。
假设我们要开发一个程序,用于计算一些数列的前n个数字的和。
首先,我们可以将计算和的代码抽象为一个函数,并将数列的起始值和计算的个数作为参数传递给函数。
这样,我们可以根据具体的需求,轻松地重复使用这个函数。
其次,我们可以对计算和的方法进行优化。
如何利用adams进行复杂系统的尺寸的优化设计
在我们的工作中,有很多的方案符合我们的工作要求,我们如何从这众多方案中选出最佳的方案也即是我们的最优化设计。
下面我简单介绍如何利用Adams 软件进行最优化方案设计。
结合相关文献资料与实际深入的学习实践。
对于用Adams进行尺寸优化、设计复杂机械系统的方案选取总结如下:对于结构相对较简单的,可以直接利用Adams进行建模和优化;而对于机械系统相对复杂的,由于其建模功能较弱,目前国内主要通过美国MDI公司推出的颇负盛名的机械系统仿真软件ADAMS和PTC 公司的P ro/e进行强强联合来开发复杂机械系统的虚拟样机,这是当前国内多数研究群体的首选方案。
本周我主要就是:
1.研究和学习如何利用adams自带的优化工具进行简单的尺寸优化,而利用这个方法的前提是:待优化的参数要能用ADAMS 中的变量表示,或者说,只有用ADAMS环境本身建立的实体模型才能用,那么对利用CAD软件建模导入ADAMS 中就不能用这个问题,我们如何才能优化?
2. 有一种观念认为ADAMS. 的优化只在设计前期针对粗糙的样机模型进行,这样就可以完成零件实体建模、动力学仿真和优化,这是简单的虚拟样机;待产品制造出来后,由于实际设计和制造总要对简单虚拟样机做一些小的改动,要研究真实机构的动力学特性需要针对物理样机建立复杂虚拟样机;而对复杂的虚拟样机大体上就不需要进行结构尺寸优化了。
实际上一些零件的结构尺寸只在复杂虚拟样机上才能表现出来,而且这些尺寸的小小改动可能导致系统动力学特性的极大改变(如各种自动机中用于传递力和运动的复杂的零件外部轮廓的尺寸)。
在这种情况下,必须探讨如何在复杂的虚拟样机上进行零
部件结构尺寸的优化工作。
一.选取设计变量。
参数化建模参数化建模(Parameterizing Model)是将样机的建模参数设置为可以改变的变量、表达式和函数,在分设为改变的变量表达式数在分析过程中,只需改变样机模型中有关参数值,程序就可以自动地更新整个样机模型,获得新的样机模型。
目的:预先设置可变参数,自动地进行一系列的仿真分析,研究一个或多个参数变化对样机性能的影响,获得最危险的操作工况以及最优化的设计结果。
直接利用ADAMS/View提供了参数化建模和分析功能,可大大地提高样机建模和分析的效率。
参数化建模方法(1) 使用参数表达式参数化的表达式是使用最广泛的一种参数化方式,在建模过程中,许多要求输入参数值的场合,都可以使用参数表达式。
(2)(2) 参数化点坐标在建模过程中,点坐标主要用于定位几何形体、约束点和载荷作用点。
将点坐标参数化,可以自动修改与数点有关有关对象地修改与参数点有关联的有关对象。
(3) 关联移动通过指定参考对象和参数化对象建立关联表达式,可以方便地改变参数化对象的位置和方向。
达式可以方便地改变参数化对象的位置和方向(4) 使用设计变量通过使用设计变量,可以方便地改变样机的任何对象。
例如:将连杆构件的宽度设置为设计变量,机的任何对象例如将连杆构件的宽度设置为设计变量将弹簧的刚度设置为设计变量等。
当设计变量值改变时,所有同设计变量相关联的对象都随之改变。
有同设计变量相关联的对象都随之改变参数化建模方法一:使用参数表达式ADAMS/View中的绝大多数模型对象(例如:构件特性、力、运动、变量、传感器、测量等的定义)都可以用常数或力运动变量传感器测量等的定义)都可以用表达式两种方式来表示,例如:用表达式(3*.model_1.part_1.mass)表示构件2的质量, 如果part_1构件的质量发生变化,构件2的质量也随之变化。
其part1中.model_1.part_1.mass是引用样机中的参数,每当引用数据发生变化时,ADAMS自动计算并更新表达式的值。