【CN109934765A】高速相机全景图像拼接方法【专利】
- 格式:pdf
- 大小:716.48 KB
- 文档页数:12
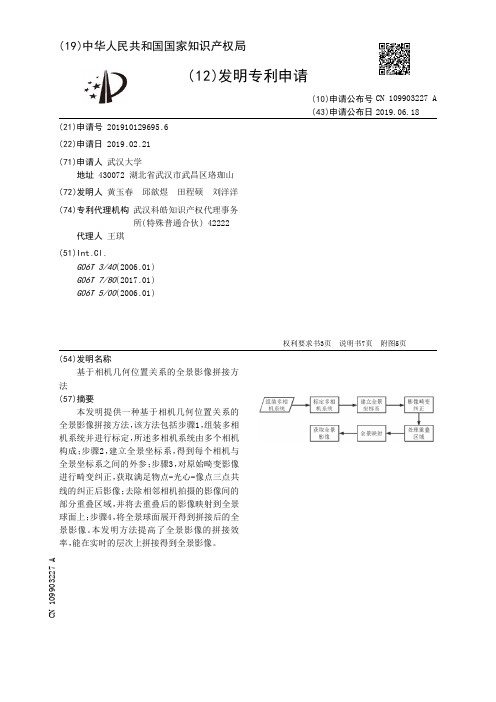
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910129695.6(22)申请日 2019.02.21(71)申请人 武汉大学地址 430072 湖北省武汉市武昌区珞珈山(72)发明人 黄玉春 邱歆煜 田程硕 刘洋洋 (74)专利代理机构 武汉科皓知识产权代理事务所(特殊普通合伙) 42222代理人 王琪(51)Int.Cl.G06T 3/40(2006.01)G06T 7/80(2017.01)G06T 5/00(2006.01)(54)发明名称基于相机几何位置关系的全景影像拼接方法(57)摘要本发明提供一种基于相机几何位置关系的全景影像拼接方法,该方法包括步骤1,组装多相机系统并进行标定,所述多相机系统由多个相机构成;步骤2,建立全景坐标系,得到每个相机与全景坐标系之间的外参;步骤3,对原始畸变影像进行畸变纠正,获取满足物点-光心-像点三点共线的纠正后影像;去除相邻相机拍摄的影像间的部分重叠区域,并将去重叠后的影像映射到全景球面上;步骤4,将全景球面展开得到拼接后的全景影像。
本发明方法提高了全景影像的拼接效率,能在实时的层次上拼接得到全景影像。
权利要求书3页 说明书7页 附图5页CN 109903227 A 2019.06.18C N 109903227A1.一种基于相机几何位置关系的全景影像拼接方法,其特征在于,包括以下步骤:步骤1,组装多相机系统并进行标定,所述多相机系统由多个相机构成;步骤2,建立全景坐标系,得到每个相机与全景坐标系之间的外参;步骤3,对原始畸变影像进行畸变纠正,获取满足物点-光心-像点三点共线的纠正后影像,然后去除相邻相机拍摄的影像间的部分重叠区域,并将去重叠后的影像映射到全景球面上;步骤4,将全景球面展开得到拼接后的全景影像。
2.如权利要求1所述的一种基于相机几何位置关系的全景影像拼接方法,其特征在于:步骤1中所述多相机系统包括6个相机,其中顶部一个相机,光轴指向天顶方向,水平侧面呈正五边形规则分布5个相机,用于侧面拍摄水平方向场景,5个相机光心大致分布在一个圆上。
![全景图像拼接方法[发明专利]](https://img.taocdn.com/s1/m/b5882849b0717fd5370cdc5a.png)
专利名称:全景图像拼接方法专利类型:发明专利
发明人:陈志波,张雯圆,陈晓明申请号:CN201911250623.3申请日:20191209
公开号:CN110930310A
公开日:
20200327
专利内容由知识产权出版社提供
摘要:本发明公开了一种全景图像拼接方法,包括:提取待拼接图像A与待拼接图像B的特征点,并进行特征匹配,利用待拼接图像B的深度信息为匹配后的特征点按深度分层,并计算各层的变换矩阵,从而对待拼接图像B进行变换,获得多幅候选拼接图像;利用待拼接图像B的深度信息获取指引图,计算每一幅候选拼接图像与图像A的缝合线,从幅候选拼接图像中选出与图像A的对齐部分,将对齐部分迭代式与图像A结合起来得到最终的拼接结果。
该方法能够更为有效的解决视差问题引起的鬼影,提升了拼接效果。
申请人:中国科学技术大学
地址:230026 安徽省合肥市包河区金寨路96号
国籍:CN
代理机构:北京凯特来知识产权代理有限公司
更多信息请下载全文后查看。
![一种全景拼接图与局部视频或图像融合显示的方法[发明专利]](https://img.taocdn.com/s1/m/b1111cf4c281e53a5902ff2f.png)
专利名称:一种全景拼接图与局部视频或图像融合显示的方法专利类型:发明专利
发明人:刘光盐,杨迪航,李捷
申请号:CN201610635319.0
申请日:20160802
公开号:CN106296584A
公开日:
20170104
专利内容由知识产权出版社提供
摘要:本发明涉及一种全景拼接图与局部视频或图像融合显示的方法。
该方法通过PTZ像机当前视频或某张截图的拍摄角度(水平角Pan,俯仰角Tilt),以及拍摄范围(镜头视场角、变倍Zoom),计算图像区域在全景拼接模型的具体位置,然后更新全景图像中相应区域内的内容,当拍摄角度和范围改变时,更改全景图像中的相应区域,而原先视频覆盖的区域还原回全景拼接图。
该方法改善解决全景拼接图与局部视频或图像融合显示的人机体验。
申请人:杭州普维光电技术有限公司
地址:310052 浙江省杭州市滨江区秋溢路500号2号楼4楼402室
国籍:CN
代理机构:杭州丰禾专利事务所有限公司
代理人:王从友
更多信息请下载全文后查看。
![一种全景视频拼接方法[发明专利]](https://img.taocdn.com/s1/m/af942a220a4e767f5acfa1c7aa00b52acec79c5c.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 202010848897.9(22)申请日 2020.08.21(71)申请人 苏州巨能图像检测技术有限公司地址 215000 江苏省苏州市昆山市巴城镇东平路271号2号楼申请人 天津港联盟国际集装箱码头有限公司(72)发明人 黄龙浩 邓巧 李华超 刘华亭 曲明 姚玉良 李娜 李春林 (74)专利代理机构 苏州广正知识产权代理有限公司 32234代理人 刘晓月(51)Int.Cl.G06T 3/40(2006.01)G06T 7/62(2017.01)G06K 9/00(2006.01)G06K 9/46(2006.01)H04N 5/232(2006.01)H04N 5/247(2006.01)H04N 5/262(2006.01)H04N 5/265(2006.01)(54)发明名称一种全景视频拼接方法(57)摘要本发明公开了一种全景视频拼接方法,读取监控摄像机内的视频数据,并进行单帧截图,在使能cuda加速的opencv库下运行全景视频拼接方法,对图像处理得到。
通过上述方式,本发明采用简化的拼接算法模型,在针对码头等大场景下的视频拼接任务中有着较好的性能,在满足大视场要求的情况下能够更加直观地给出整个场景的全貌,并且同时也能够呈现出具体的细节,有利于后续的异常入侵检测。
权利要求书2页 说明书4页CN 112037128 A 2020.12.04C N 112037128A1.一种全景视频拼接方法,其特征在于,包括步骤为:(1)读取设置在监控场景中监控摄像机内的视频数据,并确定监控摄像机的摄像头的内参和外参;(2)对所述视频数据进行单帧截图,并对截图的待拼接部分进行划分,对网格进行标记,进行透射矫正映射矩阵的生成;(3)将步骤(2)得到的摄像头的内参和外参代入initUndistortRectifyMap函数中计算出畸变变换的映射矩阵,再得到缩放映射矩阵,利用递归的方法将透射矫正映射矩阵、畸变变换的映射矩阵、缩放映射矩阵合并为一个综合映射矩阵,x轴方向上命名为x_map_dst,y 轴方向上命名为y_map_dst;(4)在videowriter上设置文件流,进行视频数据的处理,循环调用摄像头,读取每一个摄像头的视频数据,并存入mat型数组中;(5)将每个摄像头的图像上传至gpumat,并使用remap函数,使用步骤(3)得到的x_map_ dst与y_map_dst对图像做单应性变换,调用cuda模块对remap进行加速,并下载到内存中,在循环过程同时使用openmp进行多线程的操作,以加快计算;(6)在每一个监控摄像机的图像预处理完成后,分别设置针对于集装箱检测区域的范围;(7)将集装箱检测区域的图像进行处理,调用集装箱检测函数,找到所有的集装箱所在的位置和大小;(8)在主函数中设置每一个箱子的缩放比率,若某一个集装箱检测区域检测到了集装箱,则调用resize函数,将得到的集装箱按缩放比率进行缩放,并覆盖原图;(9)在完成每一个集装箱检测区域的缩放处理后,将所有图像按照监控摄像机的相对位置进行拼接;(10)对拼接完成的图像进行缝合线优化处理;(11)将得到的图像写入文件流中;(12)循环完成每一帧图像的处理。

利用全景拍摄展现广阔场景全景拼接的技巧与方法摄影是一种能够通过影像表达情感与美感的艺术形式。
在摄影领域中,全景拍摄是一种常见且独特的技术,通过将多张照片拼接在一起,可以展现广阔的场景和更大的视野。
本文将介绍全景拼接的基本概念、常用的拍摄技巧和后期处理方法,帮助读者掌握全景拍摄技术。
一、全景拼接的基本概念全景拼接是指将多张图像拼接在一起,形成一张大尺寸的全景照片。
通过全景拼接技术,可以将视野范围内的所有细节都囊括在一张照片中,完整呈现广阔的场景。
全景拼接的基本原理是通过多次拍摄不同角度的照片,然后通过图片处理软件将这些照片合成一张完整、流畅的全景图。
二、全景拍摄的技巧1.使用三脚架:全景拍摄中,相机的稳定性是非常重要的。
因此,使用三脚架固定相机可以避免拍摄时的晃动,保证照片的清晰度和稳定性。
2.选择适当的曝光:在全景拍摄中,场景中可能存在明暗差异较大的区域。
为了拍摄出清晰、优质的全景图,需要根据场景的光线情况,调整相机的曝光参数,使整个画面都能得到合适的曝光。
3.重叠拍摄:为了保证多张照片能够拼接在一起,拍摄时需要采用重叠拍摄的方式。
将相机放在固定的位置后,以适当的角度移动相机拍摄多张照片,确保相邻两张照片之间有重叠区域,便于后期拼接。
4.使用手动模式:在全景拍摄中,使用相机的手动模式可以更好地控制照片的参数,如快门速度、光圈大小和白平衡等。
手动模式可以减少因为自动模式下的参数变化而导致的照片不匹配问题。
三、后期处理方法1.选择合适的拼接软件:市面上有许多专业的拼接软件可供选择,如PTGui、Autopano等。
根据个人的需求和操作习惯,选择适合自己的软件进行全景拼接。
2.调整拼接参数:在使用拼接软件进行处理时,需要根据具体的情况进行参数调整。
其中,最重要的参数是关联点,即在照片中具有相同特征的点。
通过标记关联点,可以帮助拼接软件更准确地将照片拼接在一起。
3.修复拼接过程中的缺陷:在全景拼接过程中,可能会出现一些拼接不完整或者有明显瑕疵的区域。
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910162807.8
(22)申请日 2019.03.05
(71)申请人 北京环境特性研究所
地址 100854 北京市海淀区永定路50号
(72)发明人 李海涛 闫鑫 石春雷 杨文佳
崔述金 杨桦 李伯轩 王永艳
(74)专利代理机构 北京格允知识产权代理有限
公司 11609
代理人 周娇娇 张沫
(51)Int.Cl.
G06T 3/00(2006.01)
G06T 3/40(2006.01)
(54)发明名称
高速相机全景图像拼接方法
(57)摘要
本发明涉及一种高速相机全景图像拼接方
法,包括将高速相机设置在转台上,高速相机的
曝光间隔至多设置为转台转角位移等于相机横
向视场角时所经历的时间;使转台匀速旋转
360°,同时高速相机按照所述的曝光间隔对目标
成像;高速相机获取的每幅原始目标图像对应的
转台转角位移通过码盘的码盘值确定;将所有原
始目标图像依据对应的码盘值按成像的时间排
序,并采用非线性算法对相邻两幅原始目标图像
进行配准,去掉重叠区域,获得去重后的目标图
像;将所有去重后的目标图像按所述排序拼接在
一起,形成360°全景图。
本发明利用码盘值对图
像进行排序,效率高,提高了图像的拼接效率,从
而能够快速获得全景图像。
权利要求书2页 说明书6页 附图3页CN 109934765 A 2019.06.25
C N 109934765
A
1.一种高速相机全景图像拼接方法,其特征在于,包括将高速相机设置在转台上,高速相机的曝光间隔至多设置为转台转角位移等于相机横向视场角时所经历的时间;
使转台匀速旋转360°,同时高速相机按照所述的曝光间隔对目标成像;高速相机获取的每幅原始目标图像对应的转台转角位移通过码盘的码盘值确定;
将所有原始目标图像依据对应的码盘值按成像的时间排序,并采用非线性算法对相邻两幅原始目标图像进行配准,去掉重叠区域,获得去重后的目标图像;将所有去重后的目标图像按所述排序拼接在一起,形成360°全景图。
2.根据权利要求1所述的高速相机全景图像拼接方法,其特征在于,所述对相邻两幅原始目标图像进行配准包括,估算相邻两幅原始目标图像重叠区域的大小。
3.根据权利要求2所述的高速相机全景图像拼接方法,其特征在于,所述对相邻两幅原始目标图像进行配准还包括,根据估算的相邻两幅原始目标图像重叠区域的大小计算相邻两幅原始目标图像的20个非线性相关矩阵,所述20个非线性相关矩阵分别对应不同大小的疑似重叠区域;
对每个非线性相关矩阵的两个峰值求和得到一个Sum值,由20个非线性相关矩阵获得的20个Sum值组成一维向量,计算所述一维向量梯度变化最大的点,由所述梯度变化最大的点计算出相邻两幅原始目标图像的精确重叠区域。
4.根据权利要求3所述的高速相机全景图像拼接方法,其特征在于,在原始目标图像中去掉所述精确重叠区域,获得去重后的目标图像。
5.根据权利要求1至4中任一项所述的高速相机全景图像拼接方法,其特征在于,所述高速相机的曝光间隔t为:
t≤c/v s ,
式中c为相机横向视场角,v s 为转台转速。
6.根据权利要求1至5中任一项所述的高速相机全景图像拼接方法,其特征在于,第n幅原始目标图像对应的码盘值αn
为:
式中α1为第一幅原始目标图像对应的码盘值,αmax 为码盘值的最大值,
n为原始目标图像的顺序数。
7.根据权利要求1至6中任一项所述的高速相机全景图像拼接方法,其特征在于,估算相邻两幅原始目标图像重叠区域的大小包括:
计算相邻两幅原始目标图像重叠区域的像素数Δpix:
式中m为高速相机的横向像素数。
8.根据权利要求7所述的高速相机全景图像拼接方法,其特征在于,根据相邻两幅原始目标图像重叠区域的像素数Δpix在Δpix ±
10的像素范围内截取20个图像对为:
权 利 要 求 书1/2页2CN 109934765 A。